/IMG_2058.JPG)
 pokos
pokos

 инфо
инфо инструменты
инструменты Wyvern-2
Wyvern-2

 haleev
haleev






 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
/IMG_2058.JPG)
Google спонсирует Lunar X PRIZE, чтобы начать космическую гонку нового поколения
Теги:
V.2.> ...ни каким макаром не прокатывают затухание 211dB
Это затухание в ДВЕ стороны. Земля-Луна-Земля.
Это затухание в ДВЕ стороны. Земля-Луна-Земля.
Это сообщение редактировалось 10.10.2007 в 15:45
Хорошая ссылка по EME связи. Можно учесть, что в табличке указанно ослабление сигналов с учетом двойного прохождения через атмосферу, отражающих свойств лунного грунта и собственных радиошумов Луны

// uu2jj.nm.ru
Ник
QIP.RU: почта, поиск, новости, знакомства, игры и развлечения
QIP.RU - новости и развлечения. Сайт объединяет в себе все необходимые пользователям сервисы: почту, поиск, знакомства, хранение данных: фото, видео, файлов, а так же широкий спектр различных онлайн игр.// uu2jj.nm.ru
Ник
Жизнь коротка, путь искусства долог, удобный случай мимолетен, опыт обманчив.... Ἱπποκράτης
А вот ссылочка на цифровую радиосвязь маломощным сигналом через Луну - WSJT Home Page
И интересная ссылочка энтузиастов-спасителей России")
Ник
И интересная ссылочка энтузиастов-спасителей России
Ник
Жизнь коротка, путь искусства долог, удобный случай мимолетен, опыт обманчив.... Ἱπποκράτης
Это сообщение редактировалось 10.10.2007 в 16:13
Небольшие замечания к обсуждению
Если на земле будет только одна антена, то луноход будет ехать только
Ко времени реакции лунохода на действия оператора надо прибавить -
время кодирования картинки на лендере +
время передачи картинки +
задержки при передаче сигнала на Земле (если оператор не сидит возле антены)
И если будет предусматриваться какая-то проверка действий оператора, то это тоже задержка.
Если на земле будет только одна антена, то луноход будет ехать только
Ко времени реакции лунохода на действия оператора надо прибавить -
время кодирования картинки на лендере +
время передачи картинки +
задержки при передаче сигнала на Земле (если оператор не сидит возле антены)
И если будет предусматриваться какая-то проверка действий оператора, то это тоже задержка.
Полл> Скоко в граммах нужно киловатт/часов? А то "Не протянем" - непонятное по размерности значение. ")
У вшивого Соджонера было 16,5 Вт...
У вшивого Соджонера было 16,5 Вт...
Иногда мне кажется, что мы черти, которые штурмуют небеса (с) фон Браун
"Криптокащенизм и клоунада шовинистического толка". (с) au
Если круг оказался вдруг и не круг, не квадрат, а так...
haleev> Небольшие замечания к обсуждению
haleev> Если на земле будет только одна антена, то луноход будет ехать только
Да, я уже говорил об этом. Активное управление - только в пределах прямой видимости луны. 12 часов в сутки едем, остальное время сжимаем (+ шифруем?) и передаем прямо в Штаты качественное видео, наснятое за время езды.
haleev> Ко времени реакции лунохода на действия оператора надо прибавить -
haleev> время кодирования картинки на лендере +
Это ерунда, для навигации достаточно довольно паршивой картинки.
haleev> время передачи картинки +
Соотвественно тоже немного.
haleev> задержки при передаче сигнала на Земле (если оператор не сидит возле антены)
Пара секунд.
haleev> И если будет предусматриваться какая-то проверка действий оператора, то это тоже задержка.
Проверка?
Я думал про другое - нельзя сигнал, особено управляющий, передавать открытым текстом. Надо шифровать, от всяких... этих... хакеров, блин...
haleev> Если на земле будет только одна антена, то луноход будет ехать только
Да, я уже говорил об этом. Активное управление - только в пределах прямой видимости луны. 12 часов в сутки едем, остальное время сжимаем (+ шифруем?) и передаем прямо в Штаты качественное видео, наснятое за время езды.
haleev> Ко времени реакции лунохода на действия оператора надо прибавить -
haleev> время кодирования картинки на лендере +
Это ерунда, для навигации достаточно довольно паршивой картинки.
haleev> время передачи картинки +
Соотвественно тоже немного.
haleev> задержки при передаче сигнала на Земле (если оператор не сидит возле антены)
Пара секунд.
haleev> И если будет предусматриваться какая-то проверка действий оператора, то это тоже задержка.
Проверка?
Я думал про другое - нельзя сигнал, особено управляющий, передавать открытым текстом. Надо шифровать, от всяких... этих... хакеров, блин...
Иногда мне кажется, что мы черти, которые штурмуют небеса (с) фон Браун
"Криптокащенизм и клоунада шовинистического толка". (с) au
Если круг оказался вдруг и не круг, не квадрат, а так...
haleev> Ко времени реакции лунохода на действия оператора надо прибавить -
haleev> время кодирования картинки на лендере +
Bell> Это ерунда, для навигации достаточно довольно паршивой картинки.
но и процессор будет не самый производительный
haleev> задержки при передаче сигнала на Земле (если оператор не сидит возле антены)
Bell> Пара секунд.
Да меньше на самом деле - я имел в виду интернет-лаги
haleev> И если будет предусматриваться какая-то проверка действий оператора, то это тоже задержка.
Bell> Проверка?
Bell> Я думал про другое - нельзя сигнал, особено управляющий, передавать
Bell> Bell> открытым текстом. Надо шифровать, от всяких... этих... хакеров, блин...
Нет, я о том, чтобы оператор не гнал аппарат на заведомо непроходимые участки - камни, склоны, ямы. То есть оператор указывает направление движения, производится некоторая визуализация ожидаемого результата и ещё пара человек говорит - "Ок, поехали" (они могут просто молча нажимать пробел). Хотя бы так.
haleev> время кодирования картинки на лендере +
Bell> Это ерунда, для навигации достаточно довольно паршивой картинки.
но и процессор будет не самый производительный
haleev> задержки при передаче сигнала на Земле (если оператор не сидит возле антены)
Bell> Пара секунд.
Да меньше на самом деле - я имел в виду интернет-лаги
haleev> И если будет предусматриваться какая-то проверка действий оператора, то это тоже задержка.
Bell> Проверка?
Bell> Я думал про другое - нельзя сигнал, особено управляющий, передавать
Bell> Bell> открытым текстом. Надо шифровать, от всяких... этих... хакеров, блин...
Нет, я о том, чтобы оператор не гнал аппарат на заведомо непроходимые участки - камни, склоны, ямы. То есть оператор указывает направление движения, производится некоторая визуализация ожидаемого результата и ещё пара человек говорит - "Ок, поехали" (они могут просто молча нажимать пробел). Хотя бы так.
Кандидаты на дополнительные камеры:
ITWare:. Пресс-релизы :. Toshiba расширяет модельный ряд ПЗС-матриц 3,2- и 2,0-мегапиксельными моделями
http://www.celler.ru/news/2005/09/01/5390.html
http://itc.ua/print.phtml?ID=26393
Ник
ITWare:. Пресс-релизы :. Toshiba расширяет модельный ряд ПЗС-матриц 3,2- и 2,0-мегапиксельными моделями
http://www.celler.ru/news/2005/09/01/5390.html
http://itc.ua/print.phtml?ID=26393
Ник
Жизнь коротка, путь искусства долог, удобный случай мимолетен, опыт обманчив.... Ἱπποκράτης
Ник
Жизнь коротка, путь искусства долог, удобный случай мимолетен, опыт обманчив.... Ἱπποκράτης
Блин, еще раз специально для Ника: смотри динамический диапазон камер!! 
Белл, и что из этих 16,5 ватт следует? Что с АКБ их снять нельзя? Непонял я тебя, сорри.")
Белл, и что из этих 16,5 ватт следует? Что с АКБ их снять нельзя? Непонял я тебя, сорри.
Полл> Блин, еще раз специально для Ника: смотри динамический диапазон камер!!
А ты сам то смотрел? Там, кстати, ПЗС-матрицы, а не CMOS
Но если не нравиться выбери сам: http://www.telescope.ru/catalog/pages/182.html
Ник
А ты сам то смотрел?
Там, кстати, ПЗС-матрицы, а не CMOSНо если не нравиться выбери сам: http://www.telescope.ru/catalog/pages/182.html
Ник
Жизнь коротка, путь искусства долог, удобный случай мимолетен, опыт обманчив.... Ἱπποκράτης
Вот, что бывает с "классическими" радиосистемами:
Как "Вояджер-2" был потерян, но ненадолго
Связь аппарата с Землей ведется посредством двух радиопередатчиков с частотами 2295 МГц (длина волны 13.1 см) и 8418 МГц (3.56 см). Каждый из них для надежности дублирован. Мощность каждого передатчика очень невелика, всего 23 Вт. Это примерно равно мощности переносной автомобильной лампы. Вся эта мощность, благодаря большой антенне, собирается в остронаправленный радиолуч и посылается на Землю. Мощность принимаемого здесь радиосигнала обратно пропорциональна квадрату удаленности аппарата. С Нептуна сигнал был в 33 раза слабее, чем с Юпитера. С другой стороны, при одной и той же антенне с диаметром D сигнал зависит от длины волны, так как ширина радиолуча, посылаемого на Землю, составляет 1.22 L/D. (Образуемое таким лучом пятно на уровне орбиты Земли превышает 50 млн. км для сантиметрового передатчика.) Поэтому легко видеть, что мощность принимаемого сигнала будет обратно пропорциональна квадрату длины волны передатчика. Но здесь возникает другая трудность: чтобы радиолуч не ушел с Земли, система ориентации аппарата должна поддерживать направление на Землю с точностью в несколько угловых минут. Есть сложности и на Земле: сантиметровое излучение сильно поглощается дождем (и меньше облаками).
Радиосистема "Вояджеров" передавала поток информации со скоростью 115.2 кбит/с с Юпитера и 45 кбит/с с Сатурна. Ниже мы остановимся на некоторых ухищрениях инженеров, позволивших "обмануть природу" и передавать по этому каналу с Нептуна в 3-4 раза больше информации, чем намечалось вначале. Но сначала об одной истории, которая показывает, что несущественных компонентов на борту космического аппарата не бывает.
Далеко не самые сложные устройства на борту "Вояджеров" - командные приемники. Они принимают и декодируют (расшифровывают) поступающие с Земли радиокоманды. По существу, это "уши" аппарата. Приемников два, основной и резервный. Впрочем, если бы инженеры JPL заранее знали, что ожидает "Вояджер-2" в полете, они, наверное, поставили бы и четыре. Все началось с того, что после очередного сеанса радиосвязи операторы забыли послать на борт специальную команду, предназначенную для самого приемника. Через длинную цепь причинно-следственных связей это привело к выходу приемника из строя. Неожиданно обнаружилось, что и переход на резервный приемник не дает результата. Аппарат оглох. На решение проблемы были брошены лучшие специалисты - ведь дело шло к фактической потере аппарата. И вот, после длинной серии экспериментов удалось установить, что аппарат все-таки что-то слышит, но слышит одну единственную "ноту". На все остальные частоты, посылаемые наземным передатчиком, он не реагирует, в том числе и на те, на которые он рассчитан. Удалось выяснить, что у резервного командного приемника из-за повреждения конденсатора не работает автоматическая подстройка частоты гетеродина - несложный, но очень важный электронный узел. Дело в том, что частота сигнала, принимаемого аппаратом с Земли, постоянно меняется из-за доплеровских сдвигов, достигающих очень больших значений. Без автоматической подстройки приемник может принимать лишь сигналы в пределах собственной полосы пропускания, которая составляет менее 1/1000 нормального ее значения. Даже доплеровские сдвиги от суточного вращения Земли превышают ее в 30 раз. Оставался единственный выход из положения - каждый раз рассчитывать новое значение передаваемой частоты и подстраивать наземный передатчик так, чтобы, после всех сдвигов, сигнал как раз попадал в полосу пропускания приемника. Это и было сделано - компьютер теперь включен в контур передатчика. И так - все 12 лет полета. Продолжительность ежедневной связи с аппаратом составляет от8 до 16 ч, а в сближениях связь идет круглосуточно. Кстати, сигналы на аппарат обычно посылает 400-киловаттный передатчик в Голдстоуне с его 64-метровой (теперь 70-метровой) антенной. Специалисты JPL рассказывают, что время от времени аппарат теряет сигнал и снова "глохнет" на несколько дней. Но есть люди, которые каким-то "шестым чувством" угадывают, на какую частоту ушел приемник. Положение осложняется тем, что кроме доплеровских сдвигов на настройку приемника сильно влияет температура аппарата, которую приходится контролировать очень тщательно: от ее изменения на четверть градуса настройка уходит на 100 Гц. Есть и другие факторы, старение деталей, например. И все-таки ни одно сближение не было потеряно! Впрочем, в памяти бортового компьютера находится еще одна "аварийная" программа, которая предписывает аппарату думать самому, если такое случится. В сближении с Нептуном на консультации с Землей времени не оставалось: время распространения радиосигнала "туда и обратно" составляло 8.2 ч.
Ник
Как "Вояджер-2" был потерян, но ненадолго
Связь аппарата с Землей ведется посредством двух радиопередатчиков с частотами 2295 МГц (длина волны 13.1 см) и 8418 МГц (3.56 см). Каждый из них для надежности дублирован. Мощность каждого передатчика очень невелика, всего 23 Вт. Это примерно равно мощности переносной автомобильной лампы. Вся эта мощность, благодаря большой антенне, собирается в остронаправленный радиолуч и посылается на Землю. Мощность принимаемого здесь радиосигнала обратно пропорциональна квадрату удаленности аппарата. С Нептуна сигнал был в 33 раза слабее, чем с Юпитера. С другой стороны, при одной и той же антенне с диаметром D сигнал зависит от длины волны, так как ширина радиолуча, посылаемого на Землю, составляет 1.22 L/D. (Образуемое таким лучом пятно на уровне орбиты Земли превышает 50 млн. км для сантиметрового передатчика.) Поэтому легко видеть, что мощность принимаемого сигнала будет обратно пропорциональна квадрату длины волны передатчика. Но здесь возникает другая трудность: чтобы радиолуч не ушел с Земли, система ориентации аппарата должна поддерживать направление на Землю с точностью в несколько угловых минут. Есть сложности и на Земле: сантиметровое излучение сильно поглощается дождем (и меньше облаками).
Радиосистема "Вояджеров" передавала поток информации со скоростью 115.2 кбит/с с Юпитера и 45 кбит/с с Сатурна. Ниже мы остановимся на некоторых ухищрениях инженеров, позволивших "обмануть природу" и передавать по этому каналу с Нептуна в 3-4 раза больше информации, чем намечалось вначале. Но сначала об одной истории, которая показывает, что несущественных компонентов на борту космического аппарата не бывает.
Далеко не самые сложные устройства на борту "Вояджеров" - командные приемники. Они принимают и декодируют (расшифровывают) поступающие с Земли радиокоманды. По существу, это "уши" аппарата. Приемников два, основной и резервный. Впрочем, если бы инженеры JPL заранее знали, что ожидает "Вояджер-2" в полете, они, наверное, поставили бы и четыре. Все началось с того, что после очередного сеанса радиосвязи операторы забыли послать на борт специальную команду, предназначенную для самого приемника. Через длинную цепь причинно-следственных связей это привело к выходу приемника из строя. Неожиданно обнаружилось, что и переход на резервный приемник не дает результата. Аппарат оглох. На решение проблемы были брошены лучшие специалисты - ведь дело шло к фактической потере аппарата. И вот, после длинной серии экспериментов удалось установить, что аппарат все-таки что-то слышит, но слышит одну единственную "ноту". На все остальные частоты, посылаемые наземным передатчиком, он не реагирует, в том числе и на те, на которые он рассчитан. Удалось выяснить, что у резервного командного приемника из-за повреждения конденсатора не работает автоматическая подстройка частоты гетеродина - несложный, но очень важный электронный узел. Дело в том, что частота сигнала, принимаемого аппаратом с Земли, постоянно меняется из-за доплеровских сдвигов, достигающих очень больших значений. Без автоматической подстройки приемник может принимать лишь сигналы в пределах собственной полосы пропускания, которая составляет менее 1/1000 нормального ее значения. Даже доплеровские сдвиги от суточного вращения Земли превышают ее в 30 раз. Оставался единственный выход из положения - каждый раз рассчитывать новое значение передаваемой частоты и подстраивать наземный передатчик так, чтобы, после всех сдвигов, сигнал как раз попадал в полосу пропускания приемника. Это и было сделано - компьютер теперь включен в контур передатчика. И так - все 12 лет полета. Продолжительность ежедневной связи с аппаратом составляет от8 до 16 ч, а в сближениях связь идет круглосуточно. Кстати, сигналы на аппарат обычно посылает 400-киловаттный передатчик в Голдстоуне с его 64-метровой (теперь 70-метровой) антенной. Специалисты JPL рассказывают, что время от времени аппарат теряет сигнал и снова "глохнет" на несколько дней. Но есть люди, которые каким-то "шестым чувством" угадывают, на какую частоту ушел приемник. Положение осложняется тем, что кроме доплеровских сдвигов на настройку приемника сильно влияет температура аппарата, которую приходится контролировать очень тщательно: от ее изменения на четверть градуса настройка уходит на 100 Гц. Есть и другие факторы, старение деталей, например. И все-таки ни одно сближение не было потеряно! Впрочем, в памяти бортового компьютера находится еще одна "аварийная" программа, которая предписывает аппарату думать самому, если такое случится. В сближении с Нептуном на консультации с Землей времени не оставалось: время распространения радиосигнала "туда и обратно" составляло 8.2 ч.
Ник
Жизнь коротка, путь искусства долог, удобный случай мимолетен, опыт обманчив.... Ἱπποκράτης
Радисты-телеметристы, какие новости с полей?
Интернет-магазин "Ваш Солнечный Дом" - автономные системы энергоснабжения +7-499-7489064, +7-499-7489072
// solarhome.ru
СБ на 60 ватт мощности - 400 баксов. На прототип пойдет. Аккумулятор - 2 килорубля, 4 а*ч (т.е. часовой приход от батареи) Если у кого-то есть идеи относительно мотор-колес, готов выслушать. Лучше всего - коллекторные, можно шаговые. БК я пока не умею управлять, но наверное тоже реально.
В качестве прототипа компа предлагаю использовать мамку VIA EDEN. Ее потребление - порядка 20 Вт, операционка - линух, диск - SSD. Плюс прицепить к ней включалку по таймеру на контроллере. Идея в том, чтобы по низкому заряду аккумов отключаться, как приход энергии становится положительным - включаться.
Рама - я уже говорил - просто ферменная коробка с колесами по бокам и СБ сверху. Точки касания колес с землей образуют прямогольник с соотношением сторон 3 (ширина) к 2 (длина). Сами колеса - велосипедные, от гоночных машин, с узким ободом.
Бортовая связь - Wi-Fi, точка доступа профессиональной серии. Камеры - серийные 1.3 Мп вебкамеры, AIPTEK тот же самый. Включены по усбу, номинальный поток 320*240, максимальное разрешение - 1.3 Мп.
Думаю, в 15-20 кг машинка вполне уложится.
Убей в себе зомби!

hcube> Бортовая связь - Wi-Fi, точка доступа профессиональной серии. Камеры - серийные 1.3 Мп вебкамеры, AIPTEK тот же самый. Включены по усбу, номинальный поток 320*240, максимальное разрешение - 1.3 Мп.
Хм. А в качестве низкоскоростного, но более устойчивого канала - GPRS. Честно говоря, я считаю GPRS лучшим выбором, т.к. он со своими лагами и скоростью более похож на реальный тракт земля-луна да и площадь покрытия больше.
Хм. А в качестве низкоскоростного, но более устойчивого канала - GPRS. Честно говоря, я считаю GPRS лучшим выбором, т.к. он со своими лагами и скоростью более похож на реальный тракт земля-луна
да и площадь покрытия больше.
Одно другому не мешает - на борту комп, его можно по всякому подключить. Кроме того, у меня ЕСТЬ идея по поводу двигателей. Есть китайские электровелосипеды с мотор-колесами - это ГОТОВЫЙ привод. Они только тяжелые и жрут много - каждый мотор в пике до 250 Вт. Так что СБ придется ставить 2 по 60 Вт.
Итого прайс :
Корпус (материалы и сварка) : 10 круб
СБ 2х75Вт : 25 круб
Мотор-колеса 2x2 : 32 круб
Ходовой аккумулятор 16 ач 12В (2 часа автономной работы) : 8 круб
Бортовая электроника управления приводами : 7 круб
Бортовой компьютер на базе коре2 с камерами, точкой доступа и ГПРС модемом : 25 круб.
Итого : 107 килорублей. Т.е. 4 килобакса с хвостиком. Есть спонсоры? ;-D Если мы будем работать по проекту, я лично килорублей 10-15 готов выделить, могу в форме покупки СБ и изготовления ходовой электроники ;-D.
Масса ровера получается порядка 40-50 кг, максимальная скорость 12 кмч, крейсерская 4-5 кмч (ограничена приходом мощности с батареи). При той же мощности СБ штатное изделие можно будет раза в 2 облегчить - тут тяжелые СБ (на закаленном 6-мм стекле, 8 кг каждая!) и тяжелые двигатели. Габарит корпуса задается габаритом СБ и получается примерно 1100 * 1300 мм, 1300 - это ширина, учитывая штангу обзорной камеры (она же - подьемно-переворотное устройство) по центру.
Итого прайс :
Корпус (материалы и сварка) : 10 круб
СБ 2х75Вт : 25 круб
Мотор-колеса 2x2 : 32 круб
Ходовой аккумулятор 16 ач 12В (2 часа автономной работы) : 8 круб
Бортовая электроника управления приводами : 7 круб
Бортовой компьютер на базе коре2 с камерами, точкой доступа и ГПРС модемом : 25 круб.
Итого : 107 килорублей. Т.е. 4 килобакса с хвостиком. Есть спонсоры? ;-D Если мы будем работать по проекту, я лично килорублей 10-15 готов выделить, могу в форме покупки СБ и изготовления ходовой электроники ;-D.
Масса ровера получается порядка 40-50 кг, максимальная скорость 12 кмч, крейсерская 4-5 кмч (ограничена приходом мощности с батареи). При той же мощности СБ штатное изделие можно будет раза в 2 облегчить - тут тяжелые СБ (на закаленном 6-мм стекле, 8 кг каждая!) и тяжелые двигатели. Габарит корпуса задается габаритом СБ и получается примерно 1100 * 1300 мм, 1300 - это ширина, учитывая штангу обзорной камеры (она же - подьемно-переворотное устройство) по центру.
Убей в себе зомби!
Это сообщение редактировалось 07.11.2007 в 09:41
Я так понимаю, что в той же конторе можно заказать изготовление СБ и в другом варианте, чем они делают - не на стекле, а на сетке, с креплением к корпусу ровера. Это уменьшит вес килограммов на 10. Но это уже для боевого варианта.
В принципе, если проект пойдет, то наверное можно выпросить уголок в ангаре на Бауманской для возни с ровером. Но это я еще не уверен, надо спросить.
В принципе, если проект пойдет, то наверное можно выпросить уголок в ангаре на Бауманской для возни с ровером. Но это я еще не уверен, надо спросить.
Убей в себе зомби!
Это сообщение редактировалось 07.11.2007 в 10:05
Я уверен, что проектируя луноход, надо изучить прежде всего опыт RC-любителей. Нынешние электрические радиоуправляемые модели показывают невероятные еще некоторое время назад результаты. Удельная мощность двигателей доходит до 3 кВт/кг! А 50 кг - это монструозно даже для прототипа
Да знаю я про RC Аккумы например как раз оттуда. Вот примерная развесовка :
СБ - 2 х 8 кг
Корпус (рама) - 5 кг.
Комп с БП и корпусом - 2 кг
Периферия компа - 1 кг (ГПРС модем, точка доступа, веб-камеры и т.д.)
Аккумуляторы 12 В 16 АЧ - 1.500 кг включая контроллер заряда.
Ходовые колеса, включая управляющую электронику - 4 шт х 2.5 кг. = 10 кг
Обзорная штанга с камерой, колесами и приводом поворота - 2 кг.
Кабельная сеть - 1 кг.
Итого 38.5 кг.
Что можно сэкономить :
СБ на сетчатой подложке : -10кг
Более слабые мотор-колеса с планетарками и карбоновыми ободами на струнах: -5 кг
обзорная штанга из углепластика, расчитанная 'на Луну': -1кг
Ультракомпактный комп : -1 кг.
Что добавится :
- система теплорегулирования +2 кг
- дублирующий комп и привода +2 кг
- ФАР системы передачи на Землю с управляющей электроникой +10 кг
Т.е. на самом-то деле сильно много не сэкономишь. Ну будет оно 20, а не 35 кг - это не есть качественный выигрыш Хотя конечно бегать будет пошустрее.
Аккумы например как раз оттуда. Вот примерная развесовка : СБ - 2 х 8 кг
Корпус (рама) - 5 кг.
Комп с БП и корпусом - 2 кг
Периферия компа - 1 кг (ГПРС модем, точка доступа, веб-камеры и т.д.)
Аккумуляторы 12 В 16 АЧ - 1.500 кг включая контроллер заряда.
Ходовые колеса, включая управляющую электронику - 4 шт х 2.5 кг. = 10 кг
Обзорная штанга с камерой, колесами и приводом поворота - 2 кг.
Кабельная сеть - 1 кг.
Итого 38.5 кг.
Что можно сэкономить :
СБ на сетчатой подложке : -10кг
Более слабые мотор-колеса с планетарками и карбоновыми ободами на струнах: -5 кг
обзорная штанга из углепластика, расчитанная 'на Луну': -1кг
Ультракомпактный комп : -1 кг.
Что добавится :
- система теплорегулирования +2 кг
- дублирующий комп и привода +2 кг
- ФАР системы передачи на Землю с управляющей электроникой +10 кг
Т.е. на самом-то деле сильно много не сэкономишь. Ну будет оно 20, а не 35 кг - это не есть качественный выигрыш
Хотя конечно бегать будет пошустрее.
Убей в себе зомби!
Это сообщение редактировалось 07.11.2007 в 19:38
Таскайте-ка на полигон эту байду сами, батенька
Если с такого начинать - раскачиваться еще несколько лет будем. Проще надо.
Вот мой вариант:
1. Шасси - радиоуправляемая модель "монстра" в масштабе 1/8 (так уж и быть, исключительно для грузоподъемности) с электроприводом. что-то вроде этого:

// www.hobbycenter.ru
2. компьютер, приемопередатчик, камера - конечно, сотовый!
3. софт - Ява-приложение на сотовом. Вот предпосылка:
4. Ну, сверху прикрутить СБ
Это выйдет килограмм пять, и на нем можно отрабатывать вождение. С GPRS-ными лагами и удалением оператора вплоть до 12800 км по прямой.
Есть некоторая проблема - на среднестатистическом сотовом весьма мало портов ввода-вывода для управления бортовой аппаратурой. Но есть одно ноу-хау, еще со времен спектрума , в котором задействованы светящийся экран и фотодиоды...
Если с такого начинать - раскачиваться еще несколько лет будем. Проще надо.
Вот мой вариант:
1. Шасси - радиоуправляемая модель "монстра" в масштабе 1/8 (так уж и быть, исключительно для грузоподъемности) с электроприводом. что-то вроде этого:
EP TWIN FORCE SPIRIT 1/8 EP 4WD
TWINFORCE SPIRIT - усовершенствованный монстр Twin Force, оснащен двумя 550-ми электродвигателями. Это придает ему достаточную мощность для преодоления сложнейших участков трассы.// www.hobbycenter.ru
2. компьютер, приемопередатчик, камера - конечно, сотовый!
3. софт - Ява-приложение на сотовом. Вот предпосылка:
4. Ну, сверху прикрутить СБ
Это выйдет килограмм пять, и на нем можно отрабатывать вождение. С GPRS-ными лагами и удалением оператора вплоть до 12800 км по прямой.
Есть некоторая проблема - на среднестатистическом сотовом весьма мало портов ввода-вывода для управления бортовой аппаратурой. Но есть одно ноу-хау, еще со времен спектрума
, в котором задействованы светящийся экран и фотодиоды...

shaman106
новичок
Непонимаю, чё так на камерах от телефонов повисли, на сайте робоклуб был выложен один проект робота на базе 2 пня для домашнего пользования. По сути дела корпус от системника с которого сняли всё лишнее, обычная веб камера 2мега и всякие приблуды для ориентации. Суть в том что там была вылажена прога специально для управлени им через удалённый комп, картинка передавалась в реальном времени, также там была фотка этой проги при работе, очень даже ничего. Нажал кнопку на земле, а он там поехал, отпустил и он встал, надо кудато отойти, а его отклучать неохото, включил автодействие и биги к холодильнику, а он пусть километраж крутит.
Кстати о сестеме охлаждения ктонибуть подумал? В вакууме аппаратура будет очень быстро нагреваться из за её работы, плюс солнышко поднимет температуру гденибуть до 100 с лишним градусов, а на компах помоему защита стоит от перегрева, эток на 50-60 градусов, так он и невключится вовсе.
Кстати о сестеме охлаждения ктонибуть подумал? В вакууме аппаратура будет очень быстро нагреваться из за её работы, плюс солнышко поднимет температуру гденибуть до 100 с лишним градусов, а на компах помоему защита стоит от перегрева, эток на 50-60 градусов, так он и невключится вовсе.
Ну это все понятно ;-D
Собственно, чистый ровер мог бы быть и полегче. Но по моему, нет особого смысла экономить - а так такую тележку можно использовать и на земле как автономный наблюдательный робот. Да и мощность СБ позволяет использовать довольно мощный комп для решения всяких задач распознавания и движения.
Кроме того, слишком уж экономить массу ровера смысла нет. Потому что масса ракетной ступени от этого сильно не уменьшится - есть минимальная масса ЖРД, ниже которой эффективность (УИ, массовое совершество) падает, и мы к ней близки.
Собственно, чистый ровер мог бы быть и полегче. Но по моему, нет особого смысла экономить - а так такую тележку можно использовать и на земле как автономный наблюдательный робот. Да и мощность СБ позволяет использовать довольно мощный комп для решения всяких задач распознавания и движения.
Кроме того, слишком уж экономить массу ровера смысла нет. Потому что масса ракетной ступени от этого сильно не уменьшится - есть минимальная масса ЖРД, ниже которой эффективность (УИ, массовое совершество) падает, и мы к ней близки.
Убей в себе зомби!
Это сообщение редактировалось 12.11.2007 в 11:13
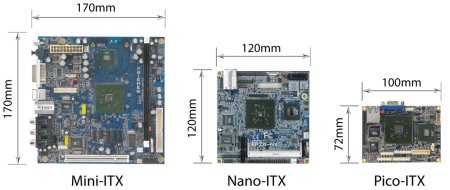
Logic Supply выпустила, как сообщается, первый в мире корпус для плат, которые имеют типоразмер Pico-ITX.
Модель корпуса получила название Serener GS-L08. Этот черный безвентиляторный корпус из стали оборудован одним отсеком для установки 2,5" винчестеров и имеет габаритные размеры 14,6 х 5,04 х 10,84 см. Встроенный БП имеет мощность 120 Вт.
В качестве системы охлаждения в нем используются тепловые трубки, алюминиевый радиатор и ребра на поверхности корпуса. На передней панели корпуса расположены 4 порта USB 2.0, разъем S/PDIF, аудиоразъемы и кнопка питания. На задней панели, как видно, расположились разъемы для Ethernet, VGA и RS-232.
В ассортименте VIA, как мы уже знаем, довольно давно имеется плата соответствующего типоразмера, модель PX10000G. Как раз с ней и был протестирован корпус. Производитель отмечает, что GS-L08 и PX10000G "является отличным набором для встраиваемых приложений и задач удаленного управления".
По сравнению с Nano-ITX продуктами, Pico-ITX, как ожидается, будет несколько дешевле, оставаясь ориентированным на промышленных пользователей. Стоимость корпуса Serener GS-L08 составляет 140 долл., плата VIA PX10000G, напомним, оценивается в сумму ~230 долл.
Источники: Logic Supply
Так что компик для прототипа есть. кстати, в принципе согласен, что можно и на шасси монстра сделать робота. Просто тогда надо обдумать энергетику - батарейка на 20 Вт мощности просто не потянет комп и движение длительное время. Надо включать-выключать будет. Типа проехали сколько-то, и выключились пока от СБ аккумулятор до заданного уровня не зальется (это можно на контроллер положить). Как залился - включились, поехали дальше.
Убей в себе зомби!
Реклама Google — средство выживания форумов :)
Я против "прямого" - мимо компа отключения питалова. Если это отключение произойдет где-нибудь в кратере, а тем более - на осыпающемся под тяжестью ровера склоне, то мы рискуем просто потерять ровер.
Copyright © Balancer 1997..2018
Создано 14.09.2007
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.09.2007
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}