 Chizh
Chizh
 инфо
инфо инструменты
инструменты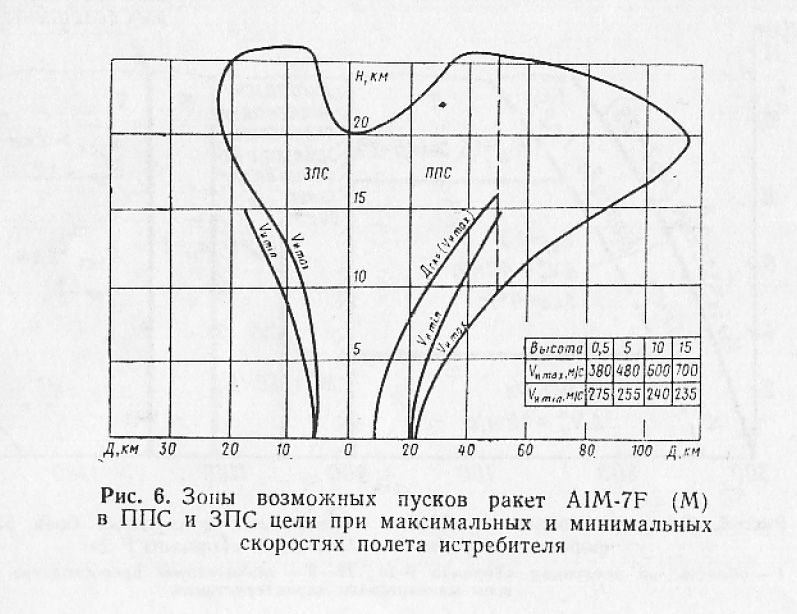



 Darth
Darth


 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/uploads/images/1247/128x128-crop/1247586-300px-sukhoi_su-30_inflight.jpg)
Несколько вопросов про Миг-29 - часть II
Теги:

Chizh>> К слову, максимальная дальность пуска ракет AIM-7F(M)по высотам:
Chizh>> 20 км - 115 км.
Aaz> Извините, но это - художественный свист...")
Aaz> Ну, разве что если пускать ее с этой высоты по МиГ-25, прущем на полной скорости на встречном курсе километров на пять ниже.
Нет не свист, а чтение с графика приведенного в методичке по БП для наших ВВС. Естественно, скорость истребителя и цели около 2М.
Но поскольку в современных USAF нет самолетов уверенно летающих на высоте 20 км с УР AIM-7, то предлагаю рассматривать эту цифру как факультативную.
Chizh>> 20 км - 115 км.
Aaz> Извините, но это - художественный свист...
Aaz> Ну, разве что если пускать ее с этой высоты по МиГ-25, прущем на полной скорости на встречном курсе километров на пять ниже.
Нет не свист, а чтение с графика приведенного в методичке по БП для наших ВВС. Естественно, скорость истребителя и цели около 2М.
Но поскольку в современных USAF нет самолетов уверенно летающих на высоте 20 км с УР AIM-7, то предлагаю рассматривать эту цифру как факультативную.
Chizh>> К слову, максимальная дальность пуска ракет AIM-7F(M)по высотам:
Chizh>> 5 км - 32 км.
Chizh>> 10 км - 52 км.
Chizh>> 15 км - 86 км.
Chizh>> 20 км - 115 км.
EvgenyVB> Андрей, откель же ты такие цифири берешь, а?
EvgenyVB> уж тебе ли не знать, что дальность пуска зависит в первую очередь от скорости цели при прочих равных?
EvgenyVB> а если приведена баллистическая дальность пуска (да встречи с землей) - то нафиг она нужна?
График в аттачменте. Смотрите сами.
Chizh>> 5 км - 32 км.
Chizh>> 10 км - 52 км.
Chizh>> 15 км - 86 км.
Chizh>> 20 км - 115 км.
EvgenyVB> Андрей, откель же ты такие цифири берешь, а?
EvgenyVB> уж тебе ли не знать, что дальность пуска зависит в первую очередь от скорости цели при прочих равных?
EvgenyVB> а если приведена баллистическая дальность пуска (да встречи с землей) - то нафиг она нужна?
График в аттачменте. Смотрите сами.
Прикреплённые файлы:
Chizh>> Да я эту тему тоже давно "как облупленную" знаю.
Darth> Вот я и удивился
У меня есть возможность пролистать доки менее распространенные, чем РЛЭ на МиГ-29 и Су-27СК.
Хотя в последних есть почти все, что необходимо для понимания.
Darth> Вот я и удивился
У меня есть возможность пролистать доки менее распространенные, чем РЛЭ на МиГ-29 и Су-27СК.
Хотя в последних есть почти все, что необходимо для понимания.
Chizh> Нет не свист, а чтение с графика приведенного в методичке по БП для наших ВВС. Естественно, скорость истребителя и цели около 2М.
За такие графики маленьким копчик массируют...
Скорости И. и Ц. даны только до высоты 15 км, а дальше уже гуляет фантазия - кто и как летит, непонятно.
Вертикальный пунктир в этом плане очень показателен - 50 км, и все, дальше сплошное теоретизирование...
Chizh> Но поскольку в современных USAF нет самолетов уверенно летающих на высоте 20 км с УР AIM-7, то предлагаю рассматривать эту цифру как факультативную.
На форуме это называется "вакуумированная сфероконина"
Если таких самолетов нет, то откуда цифра?
За такие графики маленьким копчик массируют...
Скорости И. и Ц. даны только до высоты 15 км, а дальше уже гуляет фантазия - кто и как летит, непонятно.
Вертикальный пунктир в этом плане очень показателен - 50 км, и все, дальше сплошное теоретизирование...
Chizh> Но поскольку в современных USAF нет самолетов уверенно летающих на высоте 20 км с УР AIM-7, то предлагаю рассматривать эту цифру как факультативную.
На форуме это называется "вакуумированная сфероконина"
Если таких самолетов нет, то откуда цифра?
EvgenyVB>> а если приведена баллистическая дальность пуска (да встречи с землей) - то нафиг она нужна?
Darth> Ну всё же не до встречи с землёй, а до завершения управляемого полёта
ага, и ракетка выпущенная под углом 45 град в зенит?
короче, тот же %%%, тока в профиль")
Darth> Ну всё же не до встречи с землёй, а до завершения управляемого полёта
ага, и ракетка выпущенная под углом 45 град в зенит?
короче, тот же %%%, тока в профиль

Chizh
Андрей, спасибо за график по AIM-7! Кстати, зацени: энерг. хар-ки ракеты почти один в один как у 27Р. См.: высота = 10 км, скорость 240 м/с (М=0,8): Д(ППС) ~ 37 км, Д(ЗПС) ~ 12 км. Отсюда дальность полёта ракеты ~25 км. Ну вообще так и ожидалось. Если только составители графика не пожульничали и не домыслили чё-нить
Да, там скорости носителя и цели равными положены? А то плохо видно
> У меня есть возможность пролистать доки менее распространенные, чем РЛЭ на МиГ-29 и Су-27СК.
Да я знаю, ты вообще шпион
Андрей, спасибо за график по AIM-7! Кстати, зацени: энерг. хар-ки ракеты почти один в один как у 27Р. См.: высота = 10 км, скорость 240 м/с (М=0,8): Д(ППС) ~ 37 км, Д(ЗПС) ~ 12 км. Отсюда дальность полёта ракеты ~25 км. Ну вообще так и ожидалось. Если только составители графика не пожульничали и не домыслили чё-нить
Да, там скорости носителя и цели равными положены? А то плохо видно
> У меня есть возможность пролистать доки менее распространенные, чем РЛЭ на МиГ-29 и Су-27СК.
Да я знаю, ты вообще шпион
YYKK, вы не русский? Что я должен был прочитать? Ткните пальцем.
Aaz> За такие графики маленьким копчик массируют...
Aaz> Скорости И. и Ц. даны только до высоты 15 км, а дальше уже гуляет фантазия - кто и как летит, непонятно.
Aaz> Вертикальный пунктир в этом плане очень показателен - 50 км, и все, дальше сплошное теоретизирование...
Aaz> На форуме это называется "вакуумированная сфероконина"
Aaz> Если таких самолетов нет, то откуда цифра?
Да я в общем то ни на чем и не настаиваю.
Если вам так угодно пусть будут "сферокони". Что либо доказывать и рвать тельняшку я не собираюсь.
Имеющий глаза да увидит.
Aaz> Скорости И. и Ц. даны только до высоты 15 км, а дальше уже гуляет фантазия - кто и как летит, непонятно.
Aaz> Вертикальный пунктир в этом плане очень показателен - 50 км, и все, дальше сплошное теоретизирование...
Aaz> На форуме это называется "вакуумированная сфероконина"
Aaz> Если таких самолетов нет, то откуда цифра?
Да я в общем то ни на чем и не настаиваю.
Если вам так угодно пусть будут "сферокони". Что либо доказывать и рвать тельняшку я не собираюсь.
Имеющий глаза да увидит.

Со своей стороны, чтоб было, о чём говорить, привожу собственное понимание процесса. Если пуск происходит на дальности, при которой обеспечивается захват цели ГСН, то ограничения количества ракет в залпе по одной цели не может быть в принципе.
По идее да. В такой ситуации я тоже не вижу никаких явных причин, естественным образом ограничивающих количество одновременно пускаемых по одной цели ракет с ПАРГСН.
Я же попросил вас процитировать или указать страницу, где написано про ограничение канальности по ракете. А ещё говорите, что я читать не умею.
Процитирую я. Есть такая информация об ограничении канальности СУВ Су-27С по ракетам. Речь о радийных Р-27Р/ЭР с радиокоррекцией.
5.6.1.После схода 2-х ракет с РГС в режиме ОДИН (двух серий в режиме ЧАСТЬ), пущенных по одной цели двумя нажатиями гашетки П, в зависимости от условий пуска, символ ДР может скачком переместиться на меньшую дальность, максимально, примерно, на 0,5 первоначальной дальности. Если осуществлять пуск третьей ракеты с РГС (до достижения первой ракетой цели), то она пойдет на цель без радиокоррекции.
Пускать третью ракету СУВ не запретит, но для неё не будут передаваться сигналы радиокоррекции, если к моменту пуска не списался таймер полёта первой ракеты. То есть СУВ СУ-27С способна передавать сигналы радиокоррекции одновременно максимум на 2 ракеты, на каждую ракету свой сигнал, своя система координат где-то в памяти СУВ, в которую переводятся координаты цели, определяемые с помошью РЛС и бортовой ИНС. Почему в ИНС ракет и СУВ не используется единная абсолютная система координат и ракеты просто не запоминают на старте не свой "ноль", а позицию в абс. СК, тогда для всех ракет, пущенных по одной цели нужен будет один сигнал радиокоррекции. Неужели это из-за малой разрядности представления координат в ИНС ракеты?
Darth> Не 100% 100% пассивная – это как у ПРР. А если переизлучённый целью сигнал сравнивается с опорным от РЛС (у Р-33 в заднице антенну видели?) – это уже что-то более чем пассивная
Неа. Чисто пассив.
Это система наведения полуактивная. В систему наведения входит ещё и подсветчик. А ГСН здесь ни при чём
Полуактивная радиолокационная ГСН в отличие от пассивной тем, что наводится на отраженный РЛ-сигнал от РЛС носителя, посему имеет очень узкий диапазон частот, перед пуском (или даже подвеской) она настраивается на частоту передатчика подсвета носителя. Кроме того в отличие от пассивной РГСН, ПАРГСН выполняет сопровождение цели не только по направлению, но и по параметру селекции, характеризующему пространственной положение цели И/ИЛИ параметр её движения (дальности И/ИЛИ скорости сближения), для чего используется как отражённый от цели сигнал, излученный передатчиком подсвета носителя и принятый носовой антенной ГСН, так и прямой его сигнал, принятый хвостовым приёмником.
При наведении на постановщик шумовой помехи неважно как будет работать система сопровождения ПАРГСН если будет работать, то будет работать как пассиная РГСН.
Одновременно в полете может быть не более двух ракет с РГС-27. Это все из-за того, что для РГС-27 не подходит то излучение, которое нужно для локатора и наоборот, поэтому локатору приходится разделять время работы между собственными нуждами и нуждами РГС.
На 9-12?
В режме "сопровождение" РЛС Н-019 периодически облучает цель сигналами подсвета, которые принимаются только ракетой, прерывания ими интервалы сопровождения цели. Только разве есть и может быть какая-нибудь зависимость доли времени подсвета цели в общей циклограмме работы РЛС в режиме "сопровождения" от количества пущенных ракет с ПАРГСН? Это мы говорим о многоракетном обстреле одной цели. Сигнал подсвета один и тот же, излучается на одной частоте и направлен на одну и ту же цель, может использоваться неограниченным количеством пущенных и наводящихся ракет. Не вижу причин, по которым для нескольких пущенных по одной цели ракет с ПАРГСН нужно увеличить время передачи сигналов подсвета в циклограмме работы РЛС этом режиме.
Вот блин.
Ну не бывает полуактивных ГСН. Это всё как полубеременная девушка.
Голова бывает или активной или пассивной. Третьего ещё никто не придумал. Как и полубеременных...
Полоса здесь вообще не в кассу...
Про сопровождение - прочитайте режим РНП.
Ну не бывает полуактивных ГСН. Это всё как полубеременная девушка.
Голова бывает или активной или пассивной. Третьего ещё никто не придумал. Как и полубеременных...
Полоса здесь вообще не в кассу...
Про сопровождение - прочитайте режим РНП.
Специально для Дио:
1) активная ГСН облучает цель.
2) пассивная ГСН не облучает цель.
3) полуактивная ГСН не облучает цель сама, но требует облучения цели сторонним источником.
1) активная ГСН облучает цель.
2) пассивная ГСН не облучает цель.
3) полуактивная ГСН не облучает цель сама, но требует облучения цели сторонним источником.
Это сообщение редактировалось 29.02.2008 в 15:18
Sabakka,
Ну если уж ВЫ так же, как я, думаете, то это мне колоссальный комплимент – значит я чего-то в этой жизни всё-таки понимаю
Спасибо за цитату из РЛЭ, несколько дней YYKK'a просил показать.
Ну ладно, пусть система РК работает не как должна, а как получилось. Давайте попробуем понять, как получилось. Видимо, речь может идти о разновидности радиокомандного режима, при котором задача вывода ракеты в упреждённую точку решается не ей самой, а носителем. Тогда на ракету передаются команды, непосредственно управляющие её полётом.
Главный вопрос (я уже задавал): Откуда СУВ знает текущие координаты и скорости ракеты? Пока вижу 2 варианта:
Вариант 1: РЛС. В режиме ДНП она не всё время уделяет наблюдению за целью и её облучению непрерывным сигналом, но также сопровождает ракеты аналогично ЗРК с РК-наведением.
Против этого варианта – всё. На самом деле не могу придумать ни одного аргумента в пользу.
а) По очевидным причинам глубоко порочна сама идея разделения наблюдения за целью и ракетами, не вызванного необходимостью. В РЛПК-27 полно предпосылок для срыва сопровождения даже в РНП. А тут мало того, что ДНП, так ещё и не полностью "посвящён" цели. Да и РЛС совсем не ФАР (инерционность переноса луча).
б) Как сопровождать ракету? На Р-27 нет активных РЛ-ответчиков или оптических трассеров (могла бы быть задействована ОЭПС). Но можно предположить, что в задней кромке киля в радиопрозрачной вставке находится какой-нибудь отражатель (пассивный РЛ-ответчик), существенно увеличивающий ЭПР в ЗПС в некотором достаточно узком диапазоне ракурсов...
в) Если дело обстоит так, зачем вообще ракете ИНС? Достаточно простого автопилота. Если нет ИНС (т.е. не ведётся счисление собственных координат и скоростей), то пуск без захвата ГСН и без РК невозможен, что противоречит РЛЭ.
г) Наконец, всё вышеперечисленное противоречит абсолютно всем имеющимся источникам информации и может оказаться справедливым только в случае, если МО вот уже 30 лет намеренно гонит по этому вопросу злостную дезу (во что никак не верится – ибо нафиг?!).
Вариант 2: СУВ. Начальные условия пуска, динамические характеристики Р-27 и законы управления, заложенные в её ИНС, полностью известны. Следовательно, носитель может прогнозировать координаты и скорости ракеты в каждый момент времени.
Аргумент "против": Сложность расчёта, низкая точность результата.
Аргумент "за" более длинный. Обратимся к РЛЭ: "После схода 2-х ракет с РГС в режиме ОДИН (двух серий в режиме ЧАСТЬ), … Если осуществлять пуск третьей ракеты с РГС (до достижения первой ракетой цели), то она пойдет на цель без радиокоррекции."
Вероятно, во втором предложении опущено уточнение. Должно было быть так: "Если осуществлять пуск третьей ракеты с РГС в режиме ОДИН (третьей серии в режиме ЧАСТЬ)..." При залповом пуске интервал схода меньше 1 с. Следовательно, до перехода на самонаведение ракеты летят относительно близко друг от друга и по примерно одной и той же траектории. Значит, результат прогноза координат одной ракеты справедлив для обеих ракет в серии (залпе).
Ну а советская электроника 80-х могла так прогнозировать координаты только 2-х ракет (пар ракет), по понятным причинам
Однако, частное мнение: В РЛЭ просто ещё одна ошибка. (Их там уже несколько найдено, некоторые весьма серьёзные). Авторы слышали звон и написали, как сами поняли. На самом деле либо ограничения нет вообще, либо оно в другом выражается (следовательно, имеет другие причины).
Вот. Прошу вашего мнения.
Ну если уж ВЫ так же, как я, думаете, то это мне колоссальный комплимент – значит я чего-то в этой жизни всё-таки понимаю
Спасибо за цитату из РЛЭ, несколько дней YYKK'a просил показать.
Ну ладно, пусть система РК работает не как должна, а как получилось. Давайте попробуем понять, как получилось. Видимо, речь может идти о разновидности радиокомандного режима, при котором задача вывода ракеты в упреждённую точку решается не ей самой, а носителем. Тогда на ракету передаются команды, непосредственно управляющие её полётом.
Главный вопрос (я уже задавал): Откуда СУВ знает текущие координаты и скорости ракеты? Пока вижу 2 варианта:
Вариант 1: РЛС. В режиме ДНП она не всё время уделяет наблюдению за целью и её облучению непрерывным сигналом, но также сопровождает ракеты аналогично ЗРК с РК-наведением.
Против этого варианта – всё. На самом деле не могу придумать ни одного аргумента в пользу.
а) По очевидным причинам глубоко порочна сама идея разделения наблюдения за целью и ракетами, не вызванного необходимостью. В РЛПК-27 полно предпосылок для срыва сопровождения даже в РНП. А тут мало того, что ДНП, так ещё и не полностью "посвящён" цели. Да и РЛС совсем не ФАР (инерционность переноса луча).
б) Как сопровождать ракету? На Р-27 нет активных РЛ-ответчиков или оптических трассеров (могла бы быть задействована ОЭПС). Но можно предположить, что в задней кромке киля в радиопрозрачной вставке находится какой-нибудь отражатель (пассивный РЛ-ответчик), существенно увеличивающий ЭПР в ЗПС в некотором достаточно узком диапазоне ракурсов...
в) Если дело обстоит так, зачем вообще ракете ИНС? Достаточно простого автопилота. Если нет ИНС (т.е. не ведётся счисление собственных координат и скоростей), то пуск без захвата ГСН и без РК невозможен, что противоречит РЛЭ.
г) Наконец, всё вышеперечисленное противоречит абсолютно всем имеющимся источникам информации и может оказаться справедливым только в случае, если МО вот уже 30 лет намеренно гонит по этому вопросу злостную дезу (во что никак не верится – ибо нафиг?!).
Вариант 2: СУВ. Начальные условия пуска, динамические характеристики Р-27 и законы управления, заложенные в её ИНС, полностью известны. Следовательно, носитель может прогнозировать координаты и скорости ракеты в каждый момент времени.
Аргумент "против": Сложность расчёта, низкая точность результата.
Аргумент "за" более длинный
. Обратимся к РЛЭ: "После схода 2-х ракет с РГС в режиме ОДИН (двух серий в режиме ЧАСТЬ), … Если осуществлять пуск третьей ракеты с РГС (до достижения первой ракетой цели), то она пойдет на цель без радиокоррекции."Вероятно, во втором предложении опущено уточнение. Должно было быть так: "Если осуществлять пуск третьей ракеты с РГС в режиме ОДИН (третьей серии в режиме ЧАСТЬ)..." При залповом пуске интервал схода меньше 1 с. Следовательно, до перехода на самонаведение ракеты летят относительно близко друг от друга и по примерно одной и той же траектории. Значит, результат прогноза координат одной ракеты справедлив для обеих ракет в серии (залпе).
Ну а советская электроника 80-х могла так прогнозировать координаты только 2-х ракет (пар ракет), по понятным причинам
Однако, частное мнение: В РЛЭ просто ещё одна ошибка. (Их там уже несколько найдено, некоторые весьма серьёзные). Авторы слышали звон и написали, как сами поняли. На самом деле либо ограничения нет вообще, либо оно в другом выражается (следовательно, имеет другие причины).
Вот. Прошу вашего мнения.
Полл> Специально для Дио:
Вообще-то Dio хороший радиотехник и собаку съел на эксплуатации различных РТС в войсках. Неужели вы могли подумать, что он не знаком с приведённой вами классической точкой зрения?
Вообще-то Dio хороший радиотехник и собаку съел на эксплуатации различных РТС в войсках. Неужели вы могли подумать, что он не знаком с приведённой вами классической точкой зрения?
Dio69> Голова бывает или активной или пассивной. Третьего ещё никто не придумал. Как и полубеременных...
Вот кстати у американцев корректнее: "{infrared/imaging IR} seeker", НО "{active/passive/semi-active radar homing} seeker", т.е. как бы "головка системы А/П/ПА РЛ самонаведения"
Вот кстати у американцев корректнее: "{infrared/imaging IR} seeker", НО "{active/passive/semi-active radar homing} seeker", т.е. как бы "головка системы А/П/ПА РЛ самонаведения"
>YYKK, вы не русский? Что я должен был прочитать? Ткните пальцем.
1. Вы национальность спрашиваете? Каюсь ... русский.
2. Прочитать Вы должны ответ на свой вопрос.
3. Подходите, ткну. Вы какой глаз предпочитаете, левый или правый?
Darth, Вы находите нормальным ляпнуть что-то, а потом требовать объяснений от других? Если человек не хочит искать сам в указанном источнике - зачем Мне стараться? Может Вы сначало вдумчиво почитаете материал, как отечественный, так и зарубежный прежде чем что-либо утверждать?
Домыслы - это хорошо, но они только домыслы.
Т.ч. жду документа по F-15C на одновременное наведение 4-х УР с РГС.
1. Вы национальность спрашиваете? Каюсь ... русский.
2. Прочитать Вы должны ответ на свой вопрос.
3. Подходите, ткну. Вы какой глаз предпочитаете, левый или правый?
Darth, Вы находите нормальным ляпнуть что-то, а потом требовать объяснений от других? Если человек не хочит искать сам в указанном источнике - зачем Мне стараться? Может Вы сначало вдумчиво почитаете материал, как отечественный, так и зарубежный прежде чем что-либо утверждать?
Домыслы - это хорошо, но они только домыслы.
Т.ч. жду документа по F-15C на одновременное наведение 4-х УР с РГС.

Fisben>> Это все из-за того, что для РГС-27 не подходит то излучение, которое нужно для локатора и наоборот, поэтому локатору приходится разделять время работы между собственными нуждами и нуждами РГС.
Darth> А можно поподробнее? Вы имеете в виду квазинепрерывный (дискретно-непрерывный) режим? Тут интересуют несколько вещей. Во-первых, циклограмма самого режима: сколько времени (в процентах, а лучше – в единицах времени) отводится на импульсное и на непрерывное излучение. А то об этом чё-то не пишут нигде.
Подробнее нельзя, ибо сам понимаешь.
Darth> Ну а во-вторых, у меня всё равно в голове не умещается: а какая разница-то? Скажем, конкретной РГС для самонаведения требуется такая-то скважность (назовём её так) квазинепрерывного излучения. Так что, двум таким РГС, работающим одновременно, требуется скважность в 2 раза меньше? Трём — в 3 раза? По-моему, налицо противоречие, ибо выше мы сказали, что РГС требуется именно "такая-то" скважность, а не в N раз меньше В чём здесь прикол? Очень хочется принцип понять.
Там несколько другой принцип.
Darth> А можно поподробнее? Вы имеете в виду квазинепрерывный (дискретно-непрерывный) режим? Тут интересуют несколько вещей. Во-первых, циклограмма самого режима: сколько времени (в процентах, а лучше – в единицах времени) отводится на импульсное и на непрерывное излучение. А то об этом чё-то не пишут нигде.
Подробнее нельзя, ибо сам понимаешь.
Darth> Ну а во-вторых, у меня всё равно в голове не умещается: а какая разница-то? Скажем, конкретной РГС для самонаведения требуется такая-то скважность (назовём её так) квазинепрерывного излучения. Так что, двум таким РГС, работающим одновременно, требуется скважность в 2 раза меньше? Трём — в 3 раза? По-моему, налицо противоречие, ибо выше мы сказали, что РГС требуется именно "такая-то" скважность, а не в N раз меньше
В чём здесь прикол? Очень хочется принцип понять.Там несколько другой принцип.
Полл> Специально для Дио:
Полл> 1) активная ГСН облучает цель.
Полл> 2) пассивная ГСН не облучает цель.
Полл> 3) полуактивная цель не облучает цель сама, но требует облучения цели сторонним источником.
Специально для Полла:
Вам Нобелевская премия за 2008 год за открытие полуактивных целей.
"..полуактивная цель не облучает цель сама, но требует облучения цели сторонним источником.."
Это прям достойно Большой энциклопедии по астрономии, которая обсуждается на соседней ветке.
Полл> 1) активная ГСН облучает цель.
Полл> 2) пассивная ГСН не облучает цель.
Полл> 3) полуактивная цель не облучает цель сама, но требует облучения цели сторонним источником.
Специально для Полла:
Вам Нобелевская премия за 2008 год за открытие полуактивных целей.
"..полуактивная цель не облучает цель сама, но требует облучения цели сторонним источником.."
Это прям достойно Большой энциклопедии по астрономии, которая обсуждается на соседней ветке.
YYKK, вы так ничего и не поняли. Проблема значительно глубже, чем вы её видите. Открытые РБП 9-12Б и РЛЭ 27СК – мурзилки. В этой ветке появились люди, квалификация которых превышает квалификацию составителей этих мурзилок. Мне интересны их мнения и объяснения.
Что до пуска 2-х и более ракет: если уж вы так превозносите эти документы, то обратитесь к стр. 22 РБП (3-й абзац снизу), а также внимательно прочитайте в РЛЭ всё, что связано с Р-27. Если лень, можете даже довольствоваться процитированным пунктом 5.6.1, про третью ракету.
Что до пуска 2-х и более ракет: если уж вы так превозносите эти документы, то обратитесь к стр. 22 РБП (3-й абзац снизу), а также внимательно прочитайте в РЛЭ всё, что связано с Р-27. Если лень, можете даже довольствоваться процитированным пунктом 5.6.1, про третью ракету.
Fisben
> Подробнее нельзя, ибо сам понимаешь.
Угу, ясно. Но я, собственно, не про конкретную реализацию, а вообще. Меня порядок величины интересует. Давайте так: в циклограмме "типового" ДНП непрерывное излучение занимает: а) 10-40%, б) 40-60%, в) 60-90% времени? На такое найдёте возможность ответить? Обещаю, что большего спрашивать по данному вопросу не буду
> Там несколько другой принцип.
Ну тогда самое смелое моё предположение. Радиокоррекция работает так, как должна (выше). Но РГС в серии разносятся по частотам (литерам). Это сделано для повышения помехоустойчивости ГСН и линии РК, для снижения вероятности одновременного подавления двух каналов наведения одним постановщиком. Небось, в начале разработки комплекса Н001-Р-27Р этого не было, но ввели по результатам полигонных испытаний в условиях организованных помех. Тогда всё становится на свои места, чередование частот в ДНП может быть не безграничным.
Прошу вас найти возможность ответить путём выбора одного из следующих вариантов:
а) Так;
б) Близко;
в) Далеко;
г) Не так;
д) "Не помню"
(Ну последний-то вариант всегда можно выбрать, если есть сомнения в "уместности" ответа
> Подробнее нельзя, ибо сам понимаешь.
Угу, ясно. Но я, собственно, не про конкретную реализацию, а вообще. Меня порядок величины интересует. Давайте так: в циклограмме "типового" ДНП непрерывное излучение занимает: а) 10-40%, б) 40-60%, в) 60-90% времени? На такое найдёте возможность ответить? Обещаю, что большего спрашивать по данному вопросу не буду
> Там несколько другой принцип.
Ну тогда самое смелое моё предположение. Радиокоррекция работает так, как должна (выше). Но РГС в серии разносятся по частотам (литерам). Это сделано для повышения помехоустойчивости ГСН и линии РК, для снижения вероятности одновременного подавления двух каналов наведения одним постановщиком. Небось, в начале разработки комплекса Н001-Р-27Р этого не было, но ввели по результатам полигонных испытаний в условиях организованных помех. Тогда всё становится на свои места, чередование частот в ДНП может быть не безграничным.
Прошу вас найти возможность ответить путём выбора одного из следующих вариантов:
а) Так;
б) Близко;
в) Далеко;
г) Не так;
д) "Не помню"
(Ну последний-то вариант всегда можно выбрать, если есть сомнения в "уместности" ответа
Теперь становится понятным, что на ракете с полуактивным принципом наведения, применяется пассивная ГСН.
)))
)))
Неа, непонятно.
Если ты сможешь применить незаметно для цели с СПО полуактив так же, как пассивную - тогда понятно.
Если ты сможешь применить незаметно для цели с СПО полуактив так же, как пассивную - тогда понятно.
До кучи - пресс-релиз МиГа:
РСК «МиГ» успешно выполнила программу модернизации МиГ-29 ВВС Словакии
Москва, 29 февраля 2008 г.
Российская самолетостроительная корпорация «МиГ» успешно выполнила программу модернизации истребителей МиГ-29 ВВС Словакии. 29 февраля 2008 г. в ходе торжественной церемонии, состоявшейся на авиабазе Слячь, все 12 модернизированных самолетов вошли в боевой состав ВВС. Представители словацкой стороны подтвердили высокое качество работ и соответствие модернизированных истребителей МиГ-29 требованиям, предъявляемым НАТО к боевым, летно-техническим и эксплуатационным характеристикам авиационной техники.
Работы, одобренные Правительством Российской Федерации, проводились в соответствии с рамочным контрактом, подписанным Министерством обороны Словакии и РСК «МиГ» 3 июля 2002 г., а также дополнительным соглашением от 2004 г.
В ходе доработок истребители МиГ-29 ВВС Словакии адаптированы к стандартам НАТО и требованиям ИКАО за счет включения в состав бортового электронного оборудования самолета соответствующих современных вычислительных, навигационных, радиосвязных систем, а также аппаратуры определения принадлежности «свой-чужой». Модернизация существенно расширяет возможности МиГ-29 в части навигации, поражения воздушных целей и взаимодействия с сухопутными, морскими и авиационными подразделениями вооруженных сил стран НАТО.
РСК «МиГ» выступила интегратором бортового оборудования, в состав которого по требованию ВВС Словакии вошли системы и приборы, выпускаемые ведущими фирмами России, США, Германии и других стран. В частности, модернизированные МиГ-29 ВВС Словакии оснащены аппаратурой определения принадлежности «свой-чужой» производства компании BAE Systems, радиостанциями и навигационной аппаратурой компании Rockwell Collins, бортовым компьютером и средствами отображения информации российского производства.
Высокие характеристики модернизированных МиГ-29 ВВС Словакии подтверждены в ходе совместных учений, проводимых в рамках Северо-Атлантического альянса.
Работы по модернизации проводились на заводе Letecke Opravovne Trencin (LOT, г.Тренчин), что позволило увеличить число рабочих мест на предприятии и обеспечило дальнейшее развитие национальной авиационной промышленности Словакии.
Параллельно с модернизацией РСК «МиГ» осуществила ряд мероприятий по радикальному улучшению эксплуатационных характеристик истребителей МиГ-29. За счет доработок, внедрения новой системы диагностики и перехода на эксплуатацию по техническому состоянию ресурс истребителей увеличился до 40 лет и 4000 часов налета.
Аналогичные мероприятия проводятся на истребителях МиГ-29 ВВС стран Центральной и Восточной Европы, например, Польши и Болгарии, что позволит самолетам сохранять боеспособность и эффективность в течение длительного времени.
В частности, ВВС Польши приняли решение о продлении эксплуатации своих МиГ-29 до 2025 года.
В соответствии с контрактом между Министерством обороны Словакии и РСК «МиГ», корпорация «МиГ» обеспечивает абонентское обслуживание истребителей МиГ-29, что позволяет поддерживать их техническую готовность на уровне более 80% парка.
РСК «МиГ» успешно выполнила программу модернизации МиГ-29 ВВС Словакии
Москва, 29 февраля 2008 г.
Российская самолетостроительная корпорация «МиГ» успешно выполнила программу модернизации истребителей МиГ-29 ВВС Словакии. 29 февраля 2008 г. в ходе торжественной церемонии, состоявшейся на авиабазе Слячь, все 12 модернизированных самолетов вошли в боевой состав ВВС. Представители словацкой стороны подтвердили высокое качество работ и соответствие модернизированных истребителей МиГ-29 требованиям, предъявляемым НАТО к боевым, летно-техническим и эксплуатационным характеристикам авиационной техники.
Работы, одобренные Правительством Российской Федерации, проводились в соответствии с рамочным контрактом, подписанным Министерством обороны Словакии и РСК «МиГ» 3 июля 2002 г., а также дополнительным соглашением от 2004 г.
В ходе доработок истребители МиГ-29 ВВС Словакии адаптированы к стандартам НАТО и требованиям ИКАО за счет включения в состав бортового электронного оборудования самолета соответствующих современных вычислительных, навигационных, радиосвязных систем, а также аппаратуры определения принадлежности «свой-чужой». Модернизация существенно расширяет возможности МиГ-29 в части навигации, поражения воздушных целей и взаимодействия с сухопутными, морскими и авиационными подразделениями вооруженных сил стран НАТО.
РСК «МиГ» выступила интегратором бортового оборудования, в состав которого по требованию ВВС Словакии вошли системы и приборы, выпускаемые ведущими фирмами России, США, Германии и других стран. В частности, модернизированные МиГ-29 ВВС Словакии оснащены аппаратурой определения принадлежности «свой-чужой» производства компании BAE Systems, радиостанциями и навигационной аппаратурой компании Rockwell Collins, бортовым компьютером и средствами отображения информации российского производства.
Высокие характеристики модернизированных МиГ-29 ВВС Словакии подтверждены в ходе совместных учений, проводимых в рамках Северо-Атлантического альянса.
Работы по модернизации проводились на заводе Letecke Opravovne Trencin (LOT, г.Тренчин), что позволило увеличить число рабочих мест на предприятии и обеспечило дальнейшее развитие национальной авиационной промышленности Словакии.
Параллельно с модернизацией РСК «МиГ» осуществила ряд мероприятий по радикальному улучшению эксплуатационных характеристик истребителей МиГ-29. За счет доработок, внедрения новой системы диагностики и перехода на эксплуатацию по техническому состоянию ресурс истребителей увеличился до 40 лет и 4000 часов налета.
Аналогичные мероприятия проводятся на истребителях МиГ-29 ВВС стран Центральной и Восточной Европы, например, Польши и Болгарии, что позволит самолетам сохранять боеспособность и эффективность в течение длительного времени.
В частности, ВВС Польши приняли решение о продлении эксплуатации своих МиГ-29 до 2025 года.
В соответствии с контрактом между Министерством обороны Словакии и РСК «МиГ», корпорация «МиГ» обеспечивает абонентское обслуживание истребителей МиГ-29, что позволяет поддерживать их техническую готовность на уровне более 80% парка.
Реклама Google — средство выживания форумов :)
Полл> Неа, непонятно.
Полл> Если ты сможешь применить незаметно для цели с СПО полуактив так же, как пассивную - тогда понятно.
Лехко.
Цель имеет СПО и ещё станцию РЭБ в виде шумелки. Пускаем Р-27Р, и она нацеливается на источник шума, а мы спокойно выключаем РЛС и летим домой.
Пассивная голова ничего не излучает - поэтому пассивная. Голова Р-27 в любом случае ничего не излучает.
Полл> Если ты сможешь применить незаметно для цели с СПО полуактив так же, как пассивную - тогда понятно.
Лехко.
Цель имеет СПО и ещё станцию РЭБ в виде шумелки. Пускаем Р-27Р, и она нацеливается на источник шума, а мы спокойно выключаем РЛС и летим домой.
Пассивная голова ничего не излучает - поэтому пассивная. Голова Р-27 в любом случае ничего не излучает.
Copyright © Balancer 1997..2020
Создано 25.02.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 25.02.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
