 Андрей Суворов
Андрей Суворов
 инфо
инфо инструменты
инструменты Serge77
Serge77


 Xan
Xan

 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:

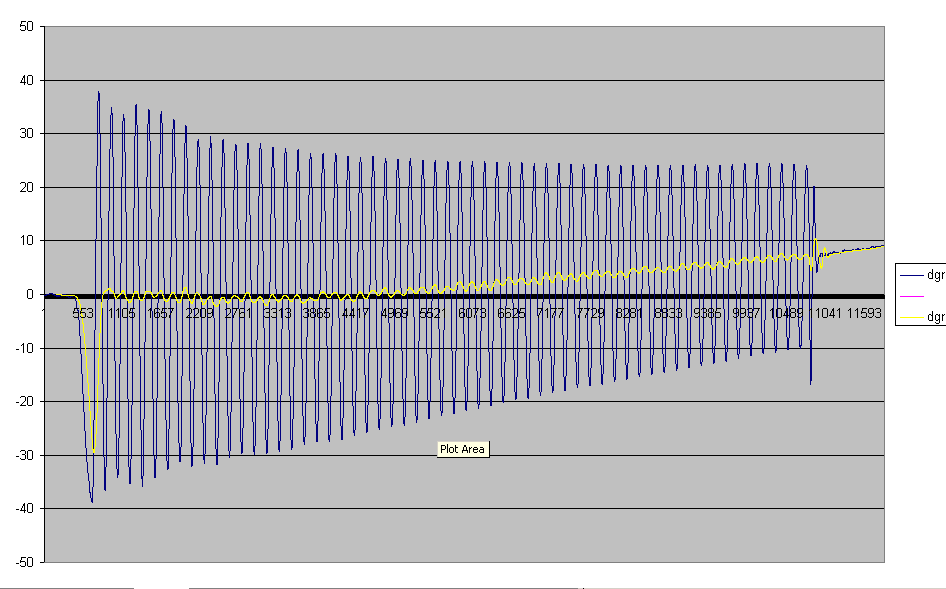
Повесил, отклонил, отпустил, подождал 3 минуты, остановил. 10000 отсчётов - это 200 секунд, всего опыт длился 3,5 минуты, уход составил 7 градусов. Это не очень удачный исход, видно, что сначала уход был мал, потом вдруг сильно возрос. Желтая линия получена скользящим средним с периодом, близким периоду колебаний, но в точности не угадал ")
Прикреплённые файлы:


А.С.> видно, что сначала уход был мал, потом вдруг сильно возрос
Может быть причина такая: чувствительный элемент находится на некотором расстоянии от собственно электронной схемы, т.е. места выделения тепла в чипе. Поэтому ЧЭ некоторое время после включения остаётся при начальной стабильной температуре и уход отсутствует. Дальше тепло доходит до ЧЭ, он начинает нагреваться и начинается уход.
Может быть причина такая: чувствительный элемент находится на некотором расстоянии от собственно электронной схемы, т.е. места выделения тепла в чипе. Поэтому ЧЭ некоторое время после включения остаётся при начальной стабильной температуре и уход отсутствует. Дальше тепло доходит до ЧЭ, он начинает нагреваться и начинается уход.

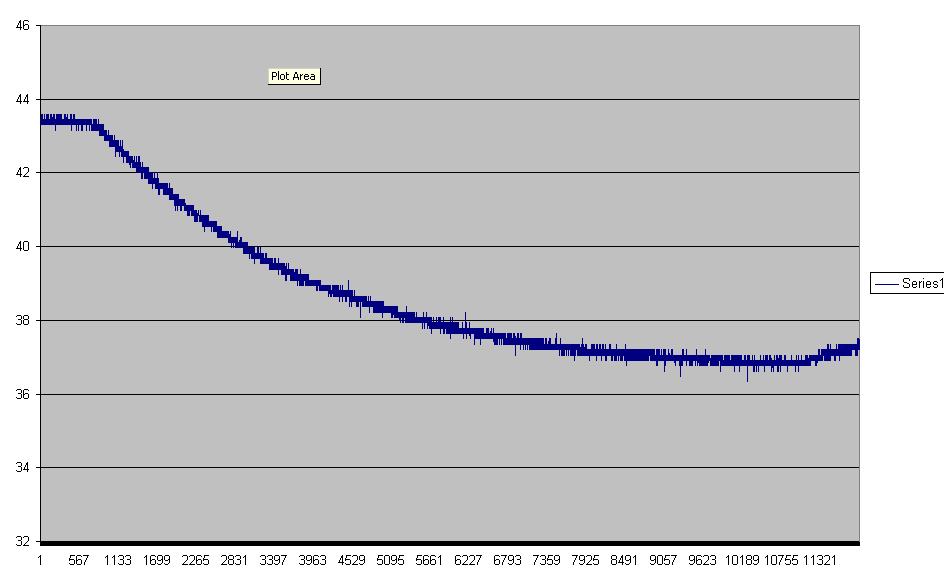
ADIS16251 не делает самостоятельной температурной компенсации, в отличие от ADIS16255, но, возможно, что-то подобное имело место - вот график температуры, видно, что с начала качания обдув воздухом заметно снизил температуру, вот только уход начался сильно позже начала снижения. Забавно. Выглядит так, как будто у измерительного элемента тепловая инерция больше, чем у термометра.
Прикреплённые файлы:
А.С.> Выглядит так, как будто у измерительного элемента тепловая инерция больше, чем у термометра.
И это легко объяснить: измеритель термометра - это часть электронной схемы (наверняка какой-нибудь терморезистор), вот он и нагревается гораздо быстрее, чем измеритель вращения. Но вид кривой нагрева у них абсолютно одинаковый (собственно, он всегда такой): сначала горизонтальная линия, потом примерно до 1500 точек - линейное изменение.
И это легко объяснить: измеритель термометра - это часть электронной схемы (наверняка какой-нибудь терморезистор), вот он и нагревается гораздо быстрее, чем измеритель вращения. Но вид кривой нагрева у них абсолютно одинаковый (собственно, он всегда такой): сначала горизонтальная линия, потом примерно до 1500 точек - линейное изменение.
Только сейчас заметил, что температура не повышается, а понижается. Но это ничего не меняет ;^))
Всё равно причина в разной тепловой инерции.
Всё равно причина в разной тепловой инерции.
Serge77>Но вид кривой нагрева у них абсолютно одинаковый (собственно, он всегда такой): сначала горизонтальная линия, потом примерно до 1500 точек - линейное изменение.
"Переведи!" (с) у кого у "них"? У меня только один термометр, и он, естественно, расположен на том же кристалле, что и АЦП и вся остальная схема гироскопа, за исключением, ясен пень, MEMS резонатора.
До 670-й точки гироскоп покоится либо движется с малой скоростью, так что температура его равна температуре в неподвижном воздухе. Дальше он начинает двигаться и охлаждаться. Но полпериода колебаний маятника (один полный ход) снижение температуры отсутствует - это тепловая инерция и тепловое сопротивление пластмассового корпуса. Дальше температура экспоненциально падает, в соответствии со среднеквадратичной скоростью примерно в 1 радиан/с или линейной 1,5 м/с - если бы размах колебаний не падал, асимптотическое значение было бы чуть меньше 36 градусов Цельсия.
Тем не менее, до 4500-й точки (а это 90 секунд от начала опыта или 76 секунд от начала качания) уход нуля гироскопа ПРАКТИЧЕСКИ ОТСУТСТВУЕТ, а с этого момента он растёт от времени линейно, как будто ноль угловой скорости скачком сместился на небольшую величину и зафиксировался на новом месте.
"Переведи!" (с) у кого у "них"? У меня только один термометр, и он, естественно, расположен на том же кристалле, что и АЦП и вся остальная схема гироскопа, за исключением, ясен пень, MEMS резонатора.
До 670-й точки гироскоп покоится либо движется с малой скоростью, так что температура его равна температуре в неподвижном воздухе. Дальше он начинает двигаться и охлаждаться. Но полпериода колебаний маятника (один полный ход) снижение температуры отсутствует - это тепловая инерция и тепловое сопротивление пластмассового корпуса. Дальше температура экспоненциально падает, в соответствии со среднеквадратичной скоростью примерно в 1 радиан/с или линейной 1,5 м/с - если бы размах колебаний не падал, асимптотическое значение было бы чуть меньше 36 градусов Цельсия.
Тем не менее, до 4500-й точки (а это 90 секунд от начала опыта или 76 секунд от начала качания) уход нуля гироскопа ПРАКТИЧЕСКИ ОТСУТСТВУЕТ, а с этого момента он растёт от времени линейно, как будто ноль угловой скорости скачком сместился на небольшую величину и зафиксировался на новом месте.

.А.С.> Тем не менее, до 4500-й точки (а это 90 секунд от начала опыта или 76 секунд от начала качания) уход нуля гироскопа ПРАКТИЧЕСКИ ОТСУТСТВУЕТ, а с этого момента он растёт от времени линейно, как будто ноль угловой скорости скачком сместился на небольшую величину и зафиксировался на новом месте.
Да, Оччень похоже.
небыло ли пропущенного значения скорости с гирсокопа ?
Может внутрений сумматор тоже пропустил ?
Да, Оччень похоже.
небыло ли пропущенного значения скорости с гирсокопа ?
Может внутрений сумматор тоже пропустил ?

.А.С.>> Тем не менее, до 4500-й точки (а это 90 секунд от начала опыта или 76 секунд от начала качания) уход нуля гироскопа ПРАКТИЧЕСКИ ОТСУТСТВУЕТ, а с этого момента он растёт от времени линейно, как будто ноль угловой скорости скачком сместился на небольшую величину и зафиксировался на новом месте.
Piroman> Да, Оччень похоже.
Piroman> небыло ли пропущенного значения с гирсокопа?
Так я же пользуюсь внутренним интегрированием, а при этом пропущенные отсчёты не важны!
Piroman> Да, Оччень похоже.
Piroman> небыло ли пропущенного значения с гирсокопа?
Так я же пользуюсь внутренним интегрированием, а при этом пропущенные отсчёты не важны!
А.С.> Так я же пользуюсь внутренним интегрированием, а при этом пропущенные отсчёты не важны!
про внутренний сумматор я дописывал, пока ты ответил
но всеравно похоже на единичный пропуск значения угловой скорости.
Даже не на изменение "0". а именно одинарный пропуск.
внутренний сумматор не ошибается ?
про внутренний сумматор я дописывал, пока ты ответил
но всеравно похоже на единичный пропуск значения угловой скорости.
Даже не на изменение "0". а именно одинарный пропуск.
внутренний сумматор не ошибается ?
А.С.> "Переведи!" (с) у кого у "них"? У меня только один термометр, и он, естественно, расположен на том же кристалле, что и АЦП и вся остальная схема гироскопа, за исключением, ясен пень, MEMS резонатора.
"Они" - это термометр и MEMS резонатор. Резонатор подвешен и кроме волосков подвеса не касается корпуса, поэтому его тепловая инерция намного больше, чем всего остального. Может быть те самые 76 секунд тепло до него и доходило (т.е. холод).
Интересно, если сделать ещё раз всё так же, но потом остановить маятник и проследить за температурой и сигналом датчика. Вернётся ли всё на место?
"Они" - это термометр и MEMS резонатор. Резонатор подвешен и кроме волосков подвеса не касается корпуса, поэтому его тепловая инерция намного больше, чем всего остального. Может быть те самые 76 секунд тепло до него и доходило (т.е. холод).
Интересно, если сделать ещё раз всё так же, но потом остановить маятник и проследить за температурой и сигналом датчика. Вернётся ли всё на место?
Вот подробно подозрительное место. Жёлтое - угловая скорость в градусах в секунду, синее - угол, малиновое - скользящее среднее угла. Хорошо видно, что форма отрицательных полуволн в первых двух периодах не такая, как в остальных - как будто вторая или четвёртая гармоника поменяли знак в этом месте (положительные полуволны не изменились заметно, значит, это чётная гармоника). Видно, что дело не в пропуске, а в каком-то влиянии на угловую скорость.
Прикреплённые файлы:
Serge77> Резонатор подвешен и кроме волосков подвеса не касается корпуса, поэтому его тепловая инерция намного больше, чем всего остального. Может быть те самые 76 секунд
Типичная теплоёмкость веществ около 3 Дж/см3/град.
"Теплопроводность" за счёт теплового излучения (при комнатной и для чёрных) около 4 ватт/м2/градус (0.0004 ватт/см2/градус).
Если там толщина плёнок 200 микрон (0.02 см), то постоянная времени будет:
t = c * d/2 / k = 3 * 0.01 / 0.0004 = 75 секунд
Потрясающее совпадение для взятых "с потолка" цифирек!!!
А какие там на самом деле размеры, кто-нибудь знает?
Придётся тогда ещё и температуру интегрировать, чтоб правильную знать.
Кстати, можно попробовать посмотреть на дрейф нуля неподвижного гироскопа, но при быстром изменении температуры.
Типичная теплоёмкость веществ около 3 Дж/см3/град.
"Теплопроводность" за счёт теплового излучения (при комнатной и для чёрных) около 4 ватт/м2/градус (0.0004 ватт/см2/градус).
Если там толщина плёнок 200 микрон (0.02 см), то постоянная времени будет:
t = c * d/2 / k = 3 * 0.01 / 0.0004 = 75 секунд
Потрясающее совпадение для взятых "с потолка" цифирек!!!
А какие там на самом деле размеры, кто-нибудь знает?
Придётся тогда ещё и температуру интегрировать, чтоб правильную знать.
Кстати, можно попробовать посмотреть на дрейф нуля неподвижного гироскопа, но при быстром изменении температуры.
В предыдущем варианте крепления гироскопа у меня гироскоп был завёрнут в поролон после того, как я сделал крепление гироскопа к струне, пришлось поролон убрать. Сегодня придумаю, как вернуть на место поролон и повторю опыт Маятник я вешаю в дверном проёме двери в детскую спальню, поэтому после 22:00 опыты проводить невозможно - дверь закрываем
Но, в общем, что в лоб, что по лбу: для наших ракет с РДТТ даже ENC-03 показывает удовлетворительную точность - за время полёта до апогея уход его не превысит пары градусов, не говоря уж об активном участке, который не превышает 10 секунд.
То есть, можно от него и рулями поуправлять.
Что же касается орбитальной ракеты, то нынешний "проект" выглядит так:
1-я ступень - ЖРД-однотонник, который я, кстати, пытаюсь реанимировать Время работы - 137 секунд. Чтобы оно увязалось, потребный пустотный УИ - 240 секунд, "земной" - не меньше 200.
2-я и 3-я ступени - покупные РДТТ, аналоги Star-13A и Star-6A, с параметрами, как прописано у Марка Уэйда.
Программа угла тангажа - первые 17 секунд вертикальный подъём, затем разворот с постоянной угловой скоростью около 0,5 град/с до местной горизонтали, точная ориентация по датчику Солнца, закрутка 2-й и 3-й ступеней вокруг оси на Солнце, пауза в примерно минуту после закрутки на Солнце (примерно 2 минуты после выключения 1й ступени), и последовательная работа РДТТ.
фишка в том, что длительность баллистической паузы определяется прямо на борту по фактическому времени прихода Солнца в поле зрения датчика+фактическому времени выключения ЖРД 1-й ступени. При этом удаётся выйти на орбиту при ошибке определения угловой скорости по тангажу в пределах 20% (т.е. от 0,45 до 0,55 град/с).
Всё это очень похоже на схему выведения Эксплорера-1, за исключением того, что длительность баллистической паузы определялась наземным вычислителем, а гироскопы были достаточно точными, чтоб не корректировать их по Солнцу :
после того, как я сделал крепление гироскопа к струне, пришлось поролон убрать. Сегодня придумаю, как вернуть на место поролон и повторю опыт Маятник я вешаю в дверном проёме двери в детскую спальню, поэтому после 22:00 опыты проводить невозможно - дверь закрываем Но, в общем, что в лоб, что по лбу: для наших ракет с РДТТ даже ENC-03 показывает удовлетворительную точность - за время полёта до апогея уход его не превысит пары градусов, не говоря уж об активном участке, который не превышает 10 секунд.
То есть, можно от него и рулями поуправлять.
Что же касается орбитальной ракеты, то нынешний "проект" выглядит так:
1-я ступень - ЖРД-однотонник, который я, кстати, пытаюсь реанимировать
Время работы - 137 секунд. Чтобы оно увязалось, потребный пустотный УИ - 240 секунд, "земной" - не меньше 200.2-я и 3-я ступени - покупные РДТТ, аналоги Star-13A и Star-6A, с параметрами, как прописано у Марка Уэйда.
Программа угла тангажа - первые 17 секунд вертикальный подъём, затем разворот с постоянной угловой скоростью около 0,5 град/с до местной горизонтали, точная ориентация по датчику Солнца, закрутка 2-й и 3-й ступеней вокруг оси на Солнце, пауза в примерно минуту после закрутки на Солнце (примерно 2 минуты после выключения 1й ступени), и последовательная работа РДТТ.
фишка в том, что длительность баллистической паузы определяется прямо на борту по фактическому времени прихода Солнца в поле зрения датчика+фактическому времени выключения ЖРД 1-й ступени. При этом удаётся выйти на орбиту при ошибке определения угловой скорости по тангажу в пределах 20% (т.е. от 0,45 до 0,55 град/с).
Всё это очень похоже на схему выведения Эксплорера-1, за исключением того, что длительность баллистической паузы определялась наземным вычислителем, а гироскопы были достаточно точными, чтоб не корректировать их по Солнцу :
ИМХО.
Уход угла НЕ ЯВЛЯЕТСЯ следствием изменения температуры.
т.к. уход изменение температуры может привести или к уходу "0", или к изменению коэфф. угловой скорости. А в этом случае изменение скорости будет на каждом считывании - график угла не может быть линейным.
может провести серию замеров ?
не имея поделок от ТИ готовлюсь к термостатированию ENC-03.
получил на пробу 50 мл мастики. у которой теплопроводность в 20! раз меньше чем у пенопласта. держит до 200 гр.Ц. (http://www.astratek.ru/tech_support.html).
собираюсь проверить.
Какой способ порекомендуете ?
Уход угла НЕ ЯВЛЯЕТСЯ следствием изменения температуры.
т.к. уход изменение температуры может привести или к уходу "0", или к изменению коэфф. угловой скорости. А в этом случае изменение скорости будет на каждом считывании - график угла не может быть линейным.
может провести серию замеров ?
не имея поделок от ТИ готовлюсь к термостатированию ENC-03.
получил на пробу 50 мл мастики. у которой теплопроводность в 20! раз меньше чем у пенопласта. держит до 200 гр.Ц. (http://www.astratek.ru/tech_support.html).
собираюсь проверить.
Какой способ порекомендуете ?
Это сообщение редактировалось 16.02.2009 в 11:38
Piroman> ИМХО.
Piroman> Уход угла НЕ ЯВЛЯЕТСЯ следствием изменения температуры.
После всех этих опытов я уж и не знаю, что думать. Внешний термометр - не помогает. Встроенный термометр - не помогает. Но теоретически должно быть.
Я попробую вернуть на место поролон...
Piroman> Уход угла НЕ ЯВЛЯЕТСЯ следствием изменения температуры.
После всех этих опытов я уж и не знаю, что думать. Внешний термометр - не помогает. Встроенный термометр - не помогает. Но теоретически должно быть.
Я попробую вернуть на место поролон...
А.С.> Но, в общем, что в лоб, что по лбу: для наших ракет с РДТТ даже ENC-03 показывает удовлетворительную точность - за время полёта до апогея уход его не превысит пары градусов, не говоря уж об активном участке, который не превышает 10 секунд.
Нет.
Вот эта гадость помешает:
Linear Acceleration Effect, typ: 0.2 °/sec/g
Если ракета разгоняется с ускорением 10 g в течение 3 секунд, то:
10 * 3 * 0.2 = 6 градусов, типовое зачение.
Его надо научиться измерять, чтоб потом корректировать.
Про ADXRS613 на стр.7 картинка есть.
Там в ответ на импульс 50 g скорость получается около 3 град/с.
Но этот импульс слишком короткий, там на 10 g видно медленное нарастание скорости в течение 20 мс.
У ADXRS613 Linear Acceleration Effect = 0.04, в пять раз меньше, чем у ADIS16251.
ЗЫ
Вот приличный АЦП — AD7683ARM (к ADXRS613 подцеплять).
16 бит, 10 мкс, маленький 8-ногий корпус, 5 вольт питание, от 0 до 5 вольт сигнал.
Нет.
Вот эта гадость помешает:
Linear Acceleration Effect, typ: 0.2 °/sec/g
Если ракета разгоняется с ускорением 10 g в течение 3 секунд, то:
10 * 3 * 0.2 = 6 градусов, типовое зачение.
Его надо научиться измерять, чтоб потом корректировать.
Про ADXRS613 на стр.7 картинка есть.
Там в ответ на импульс 50 g скорость получается около 3 град/с.
Но этот импульс слишком короткий, там на 10 g видно медленное нарастание скорости в течение 20 мс.
У ADXRS613 Linear Acceleration Effect = 0.04, в пять раз меньше, чем у ADIS16251.
ЗЫ
Вот приличный АЦП — AD7683ARM (к ADXRS613 подцеплять).
16 бит, 10 мкс, маленький 8-ногий корпус, 5 вольт питание, от 0 до 5 вольт сигнал.
Построим центрифугу точнее, центрифуга уже есть, надо только её разогнать сильнее.
10 же - это всего лишь шесть оборотов в секунду для полуметрового коромысла.
Акселерометры в состав БРЭО входят, конечно же.
АЦП в составе ADIS16251 вполне приемлемый, а влияние ускорения на показания мы обязательно проверим.
Кстати, в этом опыте линейное ускорение в нижней точке составляло где-то 2 м/с2, среднее примерно вдвое меньше, то есть, уход в 0,02 градуса в секунду в течение 75 секунд должен был бы составить 1,5 градуса, что, в принципе, могло быть заметно на графике среднего. Но среднее вычислилось не очень хорошо
точнее, центрифуга уже есть, надо только её разогнать сильнее.10 же - это всего лишь шесть оборотов в секунду для полуметрового коромысла.
Акселерометры в состав БРЭО входят, конечно же.
АЦП в составе ADIS16251 вполне приемлемый, а влияние ускорения на показания мы обязательно проверим.
Кстати, в этом опыте линейное ускорение в нижней точке составляло где-то 2 м/с2, среднее примерно вдвое меньше, то есть, уход в 0,02 градуса в секунду в течение 75 секунд должен был бы составить 1,5 градуса, что, в принципе, могло быть заметно на графике среднего. Но среднее вычислилось не очень хорошо
А.С.> АЦП в составе ADIS16251 вполне приемлемый
Ну, я на ADXRS613 прицеливаюсь, там аналоговый выход.
Думаю сделать "кубик" с тремя гироскопами и двумя AD22284-A (это X и Y).
Ну и с мозгами и интерфейсом RS485.
AD22284-A думаю поставить каждый на свою вертикальную плоскость под углом 45 градусов, что оси смотрели вот так — V.
И эти плоскости друг к другу перпендикулярно.
Осталось начать, да кончить.
А.С.> Построим центрифугу точнее, центрифуга уже есть, надо только её разогнать сильнее.
Да вот на центрифуге непонятно что будет мериться.
Тут бы надо чисто линейное движение.
На поршень паровоза приклеить!
Ну, я на ADXRS613 прицеливаюсь, там аналоговый выход.
Думаю сделать "кубик" с тремя гироскопами и двумя AD22284-A (это X и Y).
Ну и с мозгами и интерфейсом RS485.
AD22284-A думаю поставить каждый на свою вертикальную плоскость под углом 45 градусов, что оси смотрели вот так — V.
И эти плоскости друг к другу перпендикулярно.
Осталось начать, да кончить.
А.С.> Построим центрифугу
точнее, центрифуга уже есть, надо только её разогнать сильнее.Да вот на центрифуге непонятно что будет мериться.
Тут бы надо чисто линейное движение.
На поршень паровоза приклеить!
Я придумал, из чего сделать стенд для испытания гироскопов на влияние линейных ускорений - из басового динамика. поставлю на него ADXL210 и ADIS16251 и подам 5-10 герц на полной громкости. При перемещении 3 см (1,5 см амплитуды) получается при 5 Гц 14,8 м/с2, а при 10 герц - 59 м/с2. Но сегодня уже не успеваю.
А.С.> Я придумал, из чего сделать стенд для испытания гироскопов на влияние линейных ускорений - из басового динамика.
Там надо массу лепить не только осесимметрично, но и чтоб динамическая балансировка сохранилась. Иначе за счёт упругости диффузора получится вращение (колебания перпендикулярно оси).
Хм.
Если динамику приделать конфузор, а потом прямую трубу, а неё поместить лёгкий поршень, можно получить бОльшую амплитуду. Но, конечно, это цирк.
Я-то думаю сделать "платформу на резинках" (см. картинку).
Обруч со спицами (чтоб аэродинамическое сопротивление не было большим).
Точки крепления пружин (резинок) на оси на небольшом расстоянии друг от друга.
При этом получится частота колебаний по Z — самая большая, так что все остальные моды (X, Y и все вращательные) от её гармоник не получат энергию.
Причём чем больше отношение частоты по Z к остальным модам, тем чище получится.
И можно будет надеяться, что обойдётся без помех.
Можно попробовать раскачивать эту штуку моторчиком, но, скорее, достаточно будет качнуть рукой.
Там надо массу лепить не только осесимметрично, но и чтоб динамическая балансировка сохранилась. Иначе за счёт упругости диффузора получится вращение (колебания перпендикулярно оси).
Хм.
Если динамику приделать конфузор, а потом прямую трубу, а неё поместить лёгкий поршень, можно получить бОльшую амплитуду. Но, конечно, это цирк.
Я-то думаю сделать "платформу на резинках" (см. картинку).
Обруч со спицами (чтоб аэродинамическое сопротивление не было большим).
Точки крепления пружин (резинок) на оси на небольшом расстоянии друг от друга.
При этом получится частота колебаний по Z — самая большая, так что все остальные моды (X, Y и все вращательные) от её гармоник не получат энергию.
Причём чем больше отношение частоты по Z к остальным модам, тем чище получится.
И можно будет надеяться, что обойдётся без помех.
Можно попробовать раскачивать эту штуку моторчиком, но, скорее, достаточно будет качнуть рукой.
Прикреплённые файлы:

А.С.> Я придумал, из чего сделать стенд для испытания гироскопов на влияние линейных ускорений - из басового динамика. поставлю на него ADXL210 и ADIS16251 и подам 5-10 герц на полной громкости. При перемещении 3 см (1,5 см амплитуды) получается при 5 Гц 14,8 м/с2, а при 10 герц - 59 м/с2.
***
Piroman>> готов рассмотреть способ проверки с большим значением ускорения.
Non-conformist>> Приклеить испытуемый датчик на защитный колпачок диффузора НЧ-динамика, приклеить рядом с ним ADXL, и дать сигнал определенной частоты. Показания гироскопа окажутся промодулированными известным ускорением. Оценить глубину модуляции.
***
Xan> Там надо массу лепить не только осесимметрично, но и чтоб динамическая балансировка сохранилась. Иначе за счёт упругости диффузора получится вращение (колебания перпендикулярно оси).
Да, в ведре Н2О действительно содержится совершенно определенное количество Н3О. Только вот никаких практических последствий это обстоятельство не имеет.
***
Piroman>> готов рассмотреть способ проверки с большим значением ускорения.
Non-conformist>> Приклеить испытуемый датчик на защитный колпачок диффузора НЧ-динамика, приклеить рядом с ним ADXL, и дать сигнал определенной частоты. Показания гироскопа окажутся промодулированными известным ускорением. Оценить глубину модуляции.
***
Xan> Там надо массу лепить не только осесимметрично, но и чтоб динамическая балансировка сохранилась. Иначе за счёт упругости диффузора получится вращение (колебания перпендикулярно оси).
Да, в ведре Н2О действительно содержится совершенно определенное количество Н3О. Только вот никаких практических последствий это обстоятельство не имеет.

Это сообщение редактировалось 23.02.2009 в 22:03
А.С.>> Я придумал, из чего сделать стенд для испытания гироскопов на влияние линейных ускорений - из басового динамика. поставлю на него ADXL210 и ADIS16251 и подам 5-10 герц на полной громкости. При перемещении 3 см (1,5 см амплитуды) получается при 5 Гц 14,8 м/с2, а при 10 герц - 59 м/с2.
Non-conformist> ***
Piroman>>> готов рассмотреть способ проверки с большим значением ускорения.
Non-conformist>>> Приклеить испытуемый датчик на защитный колпачок диффузора НЧ-динамика, приклеить рядом с ним ADXL, и дать сигнал определенной частоты. Показания гироскопа окажутся промодулированными известным ускорением. Оценить глубину модуляции.
Non-conformist> ***
Хорошо, если ты претендуешь на приоритет, пусть он будет твой. Пусть я не придумал, а просто вспомнил. Но, видимо, сделаю
Non-conformist> ***
Piroman>>> готов рассмотреть способ проверки с большим значением ускорения.
Non-conformist>>> Приклеить испытуемый датчик на защитный колпачок диффузора НЧ-динамика, приклеить рядом с ним ADXL, и дать сигнал определенной частоты. Показания гироскопа окажутся промодулированными известным ускорением. Оценить глубину модуляции.
Non-conformist> ***
Хорошо, если ты претендуешь на приоритет, пусть он будет твой. Пусть я не придумал, а просто вспомнил. Но, видимо, сделаю
Non-conformist>>
Xan> Не пиши мне.
Это не письмо, а комментарий. И это не твой емейл, а форум.
Xan> Не пиши мне.
Это не письмо, а комментарий. И это не твой емейл, а форум.
Реклама Google — средство выживания форумов :)
А.С.> Хорошо, если ты претендуешь на приоритет, пусть он будет твой. Пусть я не придумал, а просто вспомнил. Но, видимо, сделаю
В данном случае я не проводил патентного исследования, чтобы претендовать не приоритет. А вот воспламенитель "Эласт" надо бы запатентовать, да денег нет.
В данном случае я не проводил патентного исследования, чтобы претендовать не приоритет.
А вот воспламенитель "Эласт" надо бы запатентовать, да денег нет.
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
