 Non-conformist
Non-conformist
 инфо
инфо инструменты
инструменты -VMK-
-VMK-
 Xan
Xan



 Андрей Суворов
Андрей Суворов
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/mi/mikroe/img/development-tools/pic/easypic_v7/128x128-crop/thumb_easypic_v7.png)
Кобра III
Теги:

Это ключи, по-моему четыре штуки в корпусе ДИП-16. Найти-то имхо можно без проблем, но ты бы поведал для начала, в чем идея...
А вообще нужен практический, явно видимый эффект. Нужен еще один "Гелиостат", но уже одноногий, очень похожий на ракету. Нужен впечатляющий видеоролик. Тогда, глядишь, и микроконтроллерщики в проекте появятся. А пока можно и рулеткой дистанцию до калиброванной лампочки измерять. Тут главное, чтобы все эти побочные эффекты не стали неожиданностью, не выбили из колеи...
А вообще нужен практический, явно видимый эффект. Нужен еще один "Гелиостат", но уже одноногий, очень похожий на ракету. Нужен впечатляющий видеоролик. Тогда, глядишь, и микроконтроллерщики в проекте появятся. А пока можно и рулеткой дистанцию до калиброванной лампочки измерять. Тут главное, чтобы все эти побочные эффекты не стали неожиданностью, не выбили из колеи...



Non-conformist> -VMK- мне не нравится измерение "общей освещенности". Что такое "общая освещенность"?
"общей освещенности" на цялата площ на "оптического датчика направления" както едновременно с мен написа Serge77
Serge77> точно по центру носа поставить ещё один фотодатчик и по его сигналу замерять общую освещённость и учитывать её при выдаче сигнала на актуаторы.
Non-conformist> А как вообще насчет ДЕЯТЕЛЬНОГО участия в проекте? Обещаю написать имя твоего сайта на борту!")
Имам деятелно участие в няколко мои проекта (без УВТ), свободното време е малко. Но имам немного свободно "служебно" време (аз работя "sysadmin") за идеина подкрепа по основните проблеми на проект "Кобра".
Non-conformist> Так это опять МК... Я в них ничего не понимаю. Я просто зашьюсь, если начну ковырять еще и МК.
Без МК не мога да си представя УВТ :-(
"общей освещенности" на цялата площ на "оптического датчика направления" както едновременно с мен написа Serge77
Serge77> точно по центру носа поставить ещё один фотодатчик и по его сигналу замерять общую освещённость и учитывать её при выдаче сигнала на актуаторы.
Non-conformist> А как вообще насчет ДЕЯТЕЛЬНОГО участия в проекте? Обещаю написать имя твоего сайта на борту!
Имам деятелно участие в няколко мои проекта (без УВТ), свободното време е малко. Но имам немного свободно "служебно" време (аз работя "sysadmin") за идеина подкрепа по основните проблеми на проект "Кобра".Non-conformist> Так это опять МК... Я в них ничего не понимаю. Я просто зашьюсь, если начну ковырять еще и МК.
Без МК не мога да си представя УВТ :-(

Non-conformist> автоматическую регулировку усиления
Если сигналы прологарифмировать, а потом работать с логарифмами, то вот тебе и АРУ.
На первой половинке картинки токи с фотодиодов подаются на диоды в прямом направлении, напряжение на диодах = ln(ток).
Вторая половинка картинки - это я такой датчик расчитывал однажды. Там предполагалось поставить 4 датчика TSL230R (от TAOSinc) на четырёх стенках "колодца", дно - белый рассеивающий экран, в крышке дырка.
(На картинке показаны всего два датчика, по одному направлению.)
Там была задача получить суммарный с четырёх датчиков сигнал независящий от места, куда падает пятно света (от направления на источник).
При этом отношение сигналов с противоположных датчиков менялось в разы.
Если пропускать через микроконтроллер, то там разница делённая на сумму будет как раз давать угол на источник.
Если сигналы прологарифмировать, а потом работать с логарифмами, то вот тебе и АРУ.
На первой половинке картинки токи с фотодиодов подаются на диоды в прямом направлении, напряжение на диодах = ln(ток).
Вторая половинка картинки - это я такой датчик расчитывал однажды. Там предполагалось поставить 4 датчика TSL230R (от TAOSinc) на четырёх стенках "колодца", дно - белый рассеивающий экран, в крышке дырка.
(На картинке показаны всего два датчика, по одному направлению.)
Там была задача получить суммарный с четырёх датчиков сигнал независящий от места, куда падает пятно света (от направления на источник).
При этом отношение сигналов с противоположных датчиков менялось в разы.
Если пропускать через микроконтроллер, то там разница делённая на сумму будет как раз давать угол на источник.
Прикреплённые файлы:

Non-conformist>> автоматическую регулировку усиления
Xan> Если сигналы прологарифмировать, а потом работать с логарифмами, то вот тебе и АРУ. На первой половинке картинки токи с фотодиодов подаются на диоды в прямом направлении, напряжение на диодах = ln(ток).
Правильно ли я понял, что если в качестве нижних плечей моста использовать не резисторы, а прямосмещенные диоды, то размах дифсигнала НА ВЫХОДЕ ДИФУСИЛИТЕЛЯ не будет зависим от интенсивности светового потока (мощности лампы или расстояния до нее)?
Xan> Если сигналы прологарифмировать, а потом работать с логарифмами, то вот тебе и АРУ. На первой половинке картинки токи с фотодиодов подаются на диоды в прямом направлении, напряжение на диодах = ln(ток).
Правильно ли я понял, что если в качестве нижних плечей моста использовать не резисторы, а прямосмещенные диоды, то размах дифсигнала НА ВЫХОДЕ ДИФУСИЛИТЕЛЯ не будет зависим от интенсивности светового потока (мощности лампы или расстояния до нее)?

Non-conformist> основная неприятность сейчас - люфты, осевые и радиальные.
Короче, по делу. Сегодня в кратцах объяснил мастаку суть изделия, он сказал, что если сейчас (я имею ввиду после ЧП с нашим бывшим коллегой) начальство или комисия это увидит (я имею ввиду, что увидив такие объемы цветмета все сразу поймут, что это, т.к. подобной плановой работы мы не делаем), "сядут усе". По этому, надо оформлять официаьный заказ через начальника цеха и нормально, спокойно это делать. В таком случае это будут точить 5-ые - 6- ые разряды, а не я, т.е. вероятность реревода металла в брак резко снижается, как и сроки выполнения - 1-2 дня. К тому-же у нас есть мастера впрессовывать подшипники и т.п. Я бы в дюральку загонять и не взялся. Минимальная сумма, на которую его получилось укатать - 85грн без с вашим материалом (сначала 95было). Возможно 5 рубчиков я смогу еще выдавить, но это уже смешно будет. Ну еще оплату на пару недель отсрочить можно. Это все чем я могу пока помочь, но считаю это нормальным вариантом, т.к. риск перевода материла и сроки становятся значительно меньше, а качество по лучше будет.
Собственно, решайте сами.
Да, еще вопрос, как бессопловик делать собираетесь и зачем там катализатор?
Короче, по делу. Сегодня в кратцах объяснил мастаку суть изделия, он сказал, что если сейчас (я имею ввиду после ЧП с нашим бывшим коллегой) начальство или комисия это увидит (я имею ввиду, что увидив такие объемы цветмета все сразу поймут, что это, т.к. подобной плановой работы мы не делаем), "сядут усе". По этому, надо оформлять официаьный заказ через начальника цеха и нормально, спокойно это делать. В таком случае это будут точить 5-ые - 6- ые разряды, а не я, т.е. вероятность реревода металла в брак резко снижается, как и сроки выполнения - 1-2 дня. К тому-же у нас есть мастера впрессовывать подшипники и т.п. Я бы в дюральку загонять и не взялся. Минимальная сумма, на которую его получилось укатать - 85грн без с вашим материалом (сначала 95было). Возможно 5 рубчиков я смогу еще выдавить, но это уже смешно будет. Ну еще оплату на пару недель отсрочить можно. Это все чем я могу пока помочь, но считаю это нормальным вариантом, т.к. риск перевода материла и сроки становятся значительно меньше, а качество по лучше будет.
Собственно, решайте сами.
Да, еще вопрос, как бессопловик делать собираетесь и зачем там катализатор?
Non-conformist> Правильно ли я понял, что если в качестве нижних плечей моста использовать не резисторы, а прямосмещенные диоды, то размах дифсигнала НА ВЫХОДЕ ДИФУСИЛИТЕЛЯ не будет зависим от интенсивности светового потока (мощности лампы или расстояния до нее)?
Да.
Конечно, за всё надо платить.
1. Сигнал получается довольно маленький:
Изменение тока на 10% даёт изменение напряжения на 2.6 мВ.
Изменение тока в 10 раз даёт изменение напряжения на 60 мВ.
Это при температуре 27 градусов.
Для увеличения напряжения можно включить несколько диодов последовательно. Какие-нибудь BAV99.
2. От температуры напряжение тоже зависит - прямо пропорционально абсолютной температуре (т.е., температуру надо брать в кельвинах, но это получается 10% на 30 градусов).
3. Ну и диоды должны быть достаточно идентичными. Но это не проблема.
Да.
Конечно, за всё надо платить.
1. Сигнал получается довольно маленький:
Изменение тока на 10% даёт изменение напряжения на 2.6 мВ.
Изменение тока в 10 раз даёт изменение напряжения на 60 мВ.
Это при температуре 27 градусов.
Для увеличения напряжения можно включить несколько диодов последовательно. Какие-нибудь BAV99.
2. От температуры напряжение тоже зависит - прямо пропорционально абсолютной температуре (т.е., температуру надо брать в кельвинах, но это получается 10% на 30 градусов).
3. Ну и диоды должны быть достаточно идентичными. Но это не проблема.
Xan> Изменение тока на 10% даёт изменение напряжения на 2.6 мВ. Изменение тока в 10 раз даёт изменение напряжения на 60 мВ.
На диоде? Или на выходе моста? И как в смысле линейности выхода "мВ / градус"? "Сильно логарифмическая", в смысле - горбатая?
Xan> Это при температуре 27 градусов ... 10% на 30 градусов ...
Поскольку идентичный датчику направления ДАТЧИК ПОЛОЖЕНИЯ будет находится практически в тех же температурных условиях, то характеристика "угол отклонения изделия / угол отклонения кардана" обещает быть температурно НЕзависимой, насколько я понимаю...
Xan> Для увеличения напряжения можно включить несколько диодов последовательно. Какие-нибудь BAV99.
Это обычные кремниевые диоды (0,6 В прямого падения напряжения)?
На диоде? Или на выходе моста? И как в смысле линейности выхода "мВ / градус"? "Сильно логарифмическая", в смысле - горбатая?
Xan> Это при температуре 27 градусов ... 10% на 30 градусов ...
Поскольку идентичный датчику направления ДАТЧИК ПОЛОЖЕНИЯ будет находится практически в тех же температурных условиях, то характеристика "угол отклонения изделия / угол отклонения кардана" обещает быть температурно НЕзависимой, насколько я понимаю...
Xan> Для увеличения напряжения можно включить несколько диодов последовательно. Какие-нибудь BAV99.
Это обычные кремниевые диоды (0,6 В прямого падения напряжения)?
Anzoriy> Собственно, решайте сами.
Цены у вас ниже плинтуса, тут ничего не скажешь. Только разобью я это дело на две зарплаты, иначе чревато семейными осложнениями. Кризисные явления, короче. Условия ваши меня полностью устраивают. Несколько вопросов-уточнений.
1. С каким минимальным зазором могут быть разделены заготовки колец? На чертеже я забил 3,5 мм, поскольку минимальный технологически достижимый кольцевой зазор для меня - чуть меньше 2,5 мм (высверливание по кругу); по 0,5 мм на радиус я оставил на чистовую обработку. Как будут разделятся кольца в ВАШЕМ случае?
2. Внутренний диаметр внутреннего кольца. Туда с возможно меньшим люфтом должна заходить стандартная мебельная хромированная тонкостенная пятидесятимиллиметровая труба (если не ошибаюсь, система крепления с использованием этих труб называется "джокер". Не мог бы ты, имея в виду это обстоятельство, промерить штангелем несколько таких труб, желательно в разных торговых точках вашего города? С целью точного установления максимального их диаметра (а также неравномерности диаметра вдоль трубы и эллипсности сечения)? А я сделаю то же самое в местных магазинах. Сравним результаты, и более-менее точно определимся со внутренним диаметром внутреннего кольца.
3. Собственно способ крепления двигателя в кардане. К заказу это не относится, просто мне интересно знать твое конструкторское мнение.
Anzoriy> Да, еще вопрос, как бессопловик делать собираетесь
Традиционным упариванием из сахарно-нитратного раствора. Ударным уплотнением заряда в подогреваемом корпусе-форме.
> и зачем там катализатор?
Чем короче двигатель, тем на больший угол его можно отклонить (при неизменных калибре двигателя и внутреннем диаметре трубы корпуса изделия).
Цены у вас ниже плинтуса, тут ничего не скажешь. Только разобью я это дело на две зарплаты, иначе чревато семейными осложнениями. Кризисные явления, короче. Условия ваши меня полностью устраивают. Несколько вопросов-уточнений.
1. С каким минимальным зазором могут быть разделены заготовки колец? На чертеже я забил 3,5 мм, поскольку минимальный технологически достижимый кольцевой зазор для меня - чуть меньше 2,5 мм (высверливание по кругу); по 0,5 мм на радиус я оставил на чистовую обработку. Как будут разделятся кольца в ВАШЕМ случае?
2. Внутренний диаметр внутреннего кольца. Туда с возможно меньшим люфтом должна заходить стандартная мебельная хромированная тонкостенная пятидесятимиллиметровая труба (если не ошибаюсь, система крепления с использованием этих труб называется "джокер". Не мог бы ты, имея в виду это обстоятельство, промерить штангелем несколько таких труб, желательно в разных торговых точках вашего города? С целью точного установления максимального их диаметра (а также неравномерности диаметра вдоль трубы и эллипсности сечения)? А я сделаю то же самое в местных магазинах. Сравним результаты, и более-менее точно определимся со внутренним диаметром внутреннего кольца.
3. Собственно способ крепления двигателя в кардане. К заказу это не относится, просто мне интересно знать твое конструкторское мнение.
Anzoriy> Да, еще вопрос, как бессопловик делать собираетесь
Традиционным упариванием из сахарно-нитратного раствора. Ударным уплотнением заряда в подогреваемом корпусе-форме.
> и зачем там катализатор?
Чем короче двигатель, тем на больший угол его можно отклонить (при неизменных калибре двигателя и внутреннем диаметре трубы корпуса изделия).
Xan>> Изменение тока на 10% даёт изменение напряжения на 2.6 мВ. Изменение тока в 10 раз даёт изменение напряжения на 60 мВ.
Non-conformist> На диоде? Или на выходе моста?
Разница напряжений на диодах [мВ] = 26 * ln(отношение токов фотодиодов)
Например, были токи фотодиодов по 10 микроампер. И разница напряжений на диодах была равна нулю.
26 * ln(10 / 10) = 0
Потом ток одного фотодиода стал 11, а другого 9 микроампер.
26 * ln(11 / 9) = 5.22 мВ
Non-conformist> И как в смысле линейности выхода "мВ / градус"? "Сильно логарифмическая", в смысле - горбатая?
Тут надо знать зависимость фототока от угла.
Для фотодиодов с оптикой она достаточно крутая и неопределённая, так как там не оптика, а "оптика" — всё криво-косо, с большими разбросами между экземплярами. От этого кривизна будет больше, чем от логарифма.
Мне поэтому больше нравятся фотодатчики без оптики, которые со всей полусферы свет видят. Там можно всё достаточно точно рассчитать.
Я поэтому про "колодец" и написал.
Xan>> Это при температуре 27 градусов ... 10% на 30 градусов ...
Non-conformist> Поскольку идентичный датчику направления ДАТЧИК ПОЛОЖЕНИЯ будет находится практически в тех же температурных условиях, то характеристика "угол отклонения изделия / угол отклонения кардана" обещает быть температурно НЕзависимой, насколько я понимаю...
Да там, во-первых, зависимость небольшая, несколько процентов реально. Во-вторых, она просто соответствует изменению коэффициента усиления. А он в этой задаче на результат влияет слабо. Ну, когда он на проценты меняется. Так что температурную зависимость можно "не брать в череп".
Xan>> Для увеличения напряжения можно включить несколько диодов последовательно. Какие-нибудь BAV99.
Non-conformist> Это обычные кремниевые диоды (0,6 В прямого падения напряжения)?
Да, обычные кремниевые. Общего назначения.
BAV99 и BAV70 — это два диода в корпусе SOT23.
Non-conformist> На диоде? Или на выходе моста?
Разница напряжений на диодах [мВ] = 26 * ln(отношение токов фотодиодов)
Например, были токи фотодиодов по 10 микроампер. И разница напряжений на диодах была равна нулю.
26 * ln(10 / 10) = 0
Потом ток одного фотодиода стал 11, а другого 9 микроампер.
26 * ln(11 / 9) = 5.22 мВ
Non-conformist> И как в смысле линейности выхода "мВ / градус"? "Сильно логарифмическая", в смысле - горбатая?
Тут надо знать зависимость фототока от угла.
Для фотодиодов с оптикой она достаточно крутая и неопределённая, так как там не оптика, а "оптика" — всё криво-косо, с большими разбросами между экземплярами. От этого кривизна будет больше, чем от логарифма.
Мне поэтому больше нравятся фотодатчики без оптики, которые со всей полусферы свет видят. Там можно всё достаточно точно рассчитать.
Я поэтому про "колодец" и написал.
Xan>> Это при температуре 27 градусов ... 10% на 30 градусов ...
Non-conformist> Поскольку идентичный датчику направления ДАТЧИК ПОЛОЖЕНИЯ будет находится практически в тех же температурных условиях, то характеристика "угол отклонения изделия / угол отклонения кардана" обещает быть температурно НЕзависимой, насколько я понимаю...
Да там, во-первых, зависимость небольшая, несколько процентов реально. Во-вторых, она просто соответствует изменению коэффициента усиления. А он в этой задаче на результат влияет слабо. Ну, когда он на проценты меняется. Так что температурную зависимость можно "не брать в череп".
Xan>> Для увеличения напряжения можно включить несколько диодов последовательно. Какие-нибудь BAV99.
Non-conformist> Это обычные кремниевые диоды (0,6 В прямого падения напряжения)?
Да, обычные кремниевые. Общего назначения.
BAV99 и BAV70 — это два диода в корпусе SOT23.
Non-conformist, ты моё письмо получил? Отправлял тебе на форумную почту.
Xan> Мне поэтому больше нравятся фотодатчики без оптики, которые со всей полусферы свет видят.
У меня как раз такие, плоские.
Xan> Я поэтому про "колодец" и написал.
Честно говоря, особо не врубался... Он имеет какое-то практическое значение в данной задаче?
Xan> BAV99 и BAV70 — это два диода в корпусе SOT23.
О, это хорошо в смысле всяческой симметрии. Только у меня такого нет, надо будет поискать.
***
Serge77, в том виде, в котором я наблюдаю форум, приват, видимо, не предусмотрен. Я не очень сильно на тебя обижусь, если ты отправишь свое сообщение еще раз, прямиком мне на мыло.
У меня как раз такие, плоские.
Xan> Я поэтому про "колодец" и написал.
Честно говоря, особо не врубался... Он имеет какое-то практическое значение в данной задаче?
Xan> BAV99 и BAV70 — это два диода в корпусе SOT23.
О, это хорошо в смысле всяческой симметрии. Только у меня такого нет, надо будет поискать.
***
Serge77, в том виде, в котором я наблюдаю форум, приват, видимо, не предусмотрен. Я не очень сильно на тебя обижусь, если ты отправишь свое сообщение еще раз, прямиком мне на мыло.
Serge77> Так я на мыло и отправлял, на nm.ru
О, там я не бываю, ты туда больше не пиши. Мой постоянный ящик - игнитерсобакаяру. Сейчас посмотрю nm.
О, там я не бываю, ты туда больше не пиши. Мой постоянный ящик - игнитерсобакаяру. Сейчас посмотрю nm.
Xan>> Я поэтому про "колодец" и написал.
Non-conformist> Честно говоря, особо не врубался... Он имеет какое-то практическое значение в данной задаче?
Датчик направления на солнце можно такой сделать (планирую сделать, если мой прожект разгорится).
Там в зависимости от отношения глубины к ширине можно разные зависимости сигнала от угла получить.
Возможно, кривизну от логарифмирования можно скомпенсировать, не смотрел.
Можно и на кардан такой поставить.
Недостаток у него один - много света теряется (сигнал меньше). Но для солнца это несущественно, там света с избытком.
Xan>> BAV99 и BAV70 — это два диода в корпусе SOT23.
Non-conformist> О, это хорошо в смысле всяческой симметрии. Только у меня такого нет, надо будет поискать.
Их как грязи. Есть ещё BAV56 - с общим анодом. (70 - с общим катодом, 99 - последовательно)
Non-conformist> Честно говоря, особо не врубался... Он имеет какое-то практическое значение в данной задаче?
Датчик направления на солнце можно такой сделать (планирую сделать, если мой прожект разгорится).
Там в зависимости от отношения глубины к ширине можно разные зависимости сигнала от угла получить.
Возможно, кривизну от логарифмирования можно скомпенсировать, не смотрел.
Можно и на кардан такой поставить.
Недостаток у него один - много света теряется (сигнал меньше). Но для солнца это несущественно, там света с избытком.
Xan>> BAV99 и BAV70 — это два диода в корпусе SOT23.
Non-conformist> О, это хорошо в смысле всяческой симметрии. Только у меня такого нет, надо будет поискать.
Их как грязи. Есть ещё BAV56 - с общим анодом. (70 - с общим катодом, 99 - последовательно)
Non-conformist> Сейчас посмотрю nm.
Посмотрел, отправил ответ. Если вдруг получишь, то дай знать.
Посмотрел, отправил ответ. Если вдруг получишь, то дай знать.
Xan> Датчик направления на солнце можно такой сделать
А почему именно ОТРАЖЕННЫЙ свет?
Xan> Там в зависимости от отношения глубины к ширине можно разные зависимости сигнала от угла получить.
А если разваленные сенсоры применить? Просто четыре фотодиода (это для двух осей), расположенные пирамидкой, вершина которой направлена на источник света?
Xan> Недостаток у него один - много света теряется (сигнал меньше). Но для солнца это несущественно, там света с избытком.
Тогда на кардан колодец не пойдет, там ведь не Солнце.
Я вообще сейчас рассчитываю на симметрию датчиков, в том числе конфигурационную: разваленный датчик направления, и точно такой же (два одноосевых) - датчик положения ВТ. Имхо есть хорошие виды получить две пары подобных градуировочных кривых; потом одну пару из них проинвертировать, и получить линейную характеристику "угол отклонения изделия / угол отклонения оси кардана"...
Xan> Их как грязи. Есть ещё BAV56 - с общим анодом. (70 - с общим катодом, 99 - последовательно)
Спасибо, буду смотреть.
А почему именно ОТРАЖЕННЫЙ свет?
Xan> Там в зависимости от отношения глубины к ширине можно разные зависимости сигнала от угла получить.
А если разваленные сенсоры применить? Просто четыре фотодиода (это для двух осей), расположенные пирамидкой, вершина которой направлена на источник света?
Xan> Недостаток у него один - много света теряется (сигнал меньше). Но для солнца это несущественно, там света с избытком.
Тогда на кардан колодец не пойдет, там ведь не Солнце.
Я вообще сейчас рассчитываю на симметрию датчиков, в том числе конфигурационную: разваленный датчик направления, и точно такой же (два одноосевых) - датчик положения ВТ. Имхо есть хорошие виды получить две пары подобных градуировочных кривых; потом одну пару из них проинвертировать, и получить линейную характеристику "угол отклонения изделия / угол отклонения оси кардана"...
Xan> Их как грязи. Есть ещё BAV56 - с общим анодом. (70 - с общим катодом, 99 - последовательно)
Спасибо, буду смотреть.
Ты отправлял на spas... ? Или на z43...? Первый мне доступен сейчас, там ничего нет. А второй доступен только дома.
Xan>> Датчик направления на солнце можно такой сделать
Non-conformist> А почему именно ОТРАЖЕННЫЙ свет?
Мне надо было (в древнем фотометрическом проекте) получить точность близкую к тысячной. И там, когда был хорошо коллимированный луч, всякие царапинки на стекле, пылинки - они все чувствовались. Кривулька получалась в мелких зубчиках.
При рассеянном свете всё сглаживается, точечные дефекты не мешают. Но света остаётся процентов 5...6.
Non-conformist> А если разваленные сенсоры применить? Просто четыре фотодиода (это для двух осей), расположенные пирамидкой, вершина которой направлена на источник света?
Ну вот картинка. Слева - датчик солнца. Чем дальше зайчик уходит от фотосенсора, тем больше квадрат расстояния и угол, под которым зайчик виден. Так что сигнал на фотосенсоре в зависимости от отклонения датчика получается такой:
I = I_0 / (1 + x2)2
где I_0 — сигнал, когда x=0, x — отношение отклонения зайчика от центра сенсора к высоте датчика.
Линейностью тут, на первый взгляд, и не пахнет.
Но не всё так плохо.
Для кардана можно было б сделать то, что нарисовано справа (в центре - светодиод).
Non-conformist> А почему именно ОТРАЖЕННЫЙ свет?
Мне надо было (в древнем фотометрическом проекте) получить точность близкую к тысячной. И там, когда был хорошо коллимированный луч, всякие царапинки на стекле, пылинки - они все чувствовались. Кривулька получалась в мелких зубчиках.
При рассеянном свете всё сглаживается, точечные дефекты не мешают. Но света остаётся процентов 5...6.
Non-conformist> А если разваленные сенсоры применить? Просто четыре фотодиода (это для двух осей), расположенные пирамидкой, вершина которой направлена на источник света?
Ну вот картинка. Слева - датчик солнца. Чем дальше зайчик уходит от фотосенсора, тем больше квадрат расстояния и угол, под которым зайчик виден. Так что сигнал на фотосенсоре в зависимости от отклонения датчика получается такой:
I = I_0 / (1 + x2)2
где I_0 — сигнал, когда x=0, x — отношение отклонения зайчика от центра сенсора к высоте датчика.
Линейностью тут, на первый взгляд, и не пахнет.
Но не всё так плохо.
Для кардана можно было б сделать то, что нарисовано справа (в центре - светодиод).
Прикреплённые файлы:
Serge77> Ты отправлял на spas... ? Или на z43...? Первый мне доступен сейчас, там ничего нет. А второй доступен только дома.
Понял. Продублирую на "спас" со своего штатного ящика. "Фокус" с энэмовской формой быстрого ответа не удался. Вот поэтому я "энэм" и не пользуюсь.
Понял. Продублирую на "спас" со своего штатного ящика. "Фокус" с энэмовской формой быстрого ответа не удался. Вот поэтому я "энэм" и не пользуюсь.
Получил ответ. С энэм обвинения снимаются, но туда больше не пиши, чтобы не было путаницы.
Non-conformist>> А почему именно ОТРАЖЕННЫЙ свет?
Xan> когда был хорошо коллимированный луч, всякие царапинки на стекле, пылинки - они все чувствовались. Кривулька получалась в мелких зубчиках.
Понял.
Non-conformist>> А если разваленные сенсоры применить? Просто четыре фотодиода (это для двух осей), расположенные пирамидкой, вершина которой направлена на источник света?
Xan> Ну вот картинка. I = I_0 / (1 + x2)2
Так в чем различие между разваленными и колодезными датчиками? КРОМЕ того, что в колодце до датчиков доходит только пять процентов света?
Xan> Для кардана можно было б сделать то, что нарисовано справа (в центре - светодиод).
Ты про зеркальце? В принципе мысль неплохая - гибкие шлейфы на осветитель становятся лишними. Подобное здесь уже обсуждалось. Но если в датчике НАПРАВЛЕНИЯ применить "разваленную" конфигурацию, а здесь - "плоско-зеркальную", то имхо формы выходных характеристик "мВ/угол" таких датчиков будут отличаться друг от друга?
Xan> когда был хорошо коллимированный луч, всякие царапинки на стекле, пылинки - они все чувствовались. Кривулька получалась в мелких зубчиках.
Понял.
Non-conformist>> А если разваленные сенсоры применить? Просто четыре фотодиода (это для двух осей), расположенные пирамидкой, вершина которой направлена на источник света?
Xan> Ну вот картинка. I = I_0 / (1 + x2)2
Так в чем различие между разваленными и колодезными датчиками? КРОМЕ того, что в колодце до датчиков доходит только пять процентов света?
Xan> Для кардана можно было б сделать то, что нарисовано справа (в центре - светодиод).
Ты про зеркальце? В принципе мысль неплохая - гибкие шлейфы на осветитель становятся лишними. Подобное здесь уже обсуждалось. Но если в датчике НАПРАВЛЕНИЯ применить "разваленную" конфигурацию, а здесь - "плоско-зеркальную", то имхо формы выходных характеристик "мВ/угол" таких датчиков будут отличаться друг от друга?
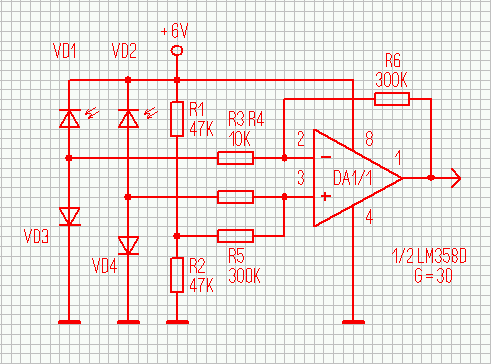
Начертил схему. Вопрос: а VD4 вроде как по постоянке получается прямосмещенным через R1 - R5 - R4? Я в том смысле, что вроде как VD3 и VD4 по постоянке как бы в разных условиях находятся? Это дело мост не перекосит? И подойдут ли такие номиналы для делителя R1-R2?
Прикреплённые файлы:

VD3 через R6 тоже. Нет, диоды в одинаковом положении, т.к. можно применять правило виртуального КЗ - между входами операционника напряжение можно считать равным нулю, т.к. коэффициент усиления у него очень высок (у идеального операционника - бесконечен). Если у него не ноль между входами, значит, ОУ находится в насыщении.
Реклама Google — средство выживания форумов :)
А вот как оно на самом деле:
1. Двухосевой датчик с четырьмя сенсорами - отстой. При отклонении от нуля по одной оси, чувствительность по другой резко падает.
1.1. Круглую дырку для одноосевого датчика делать нельзя - надо делать протяжённую щель.
2. Есть оптимальная геометрия, при которой получается линейная характеристика "сигнал от тангенса угла".
На картинке:
Два сенсора, чувствительная поверхность которых находится на расстоянии Z от белого экрана.
X — расстояние от оси симметрии, до центров сенсоров.
L — расстояние от оси симметрии до центра "зайчика".
Внизу форма кривой - в середине чувствительность принимается за 100%, потом некоторый подъём, а дальше к краю спад.
Границей считается то место, где величина спада равна величине подъёма.
И вот какие результаты по линейности сигнала, который здесь равен просто разности сигналов с сенсоров:
При отношении Z/X = 1.2 нелинейность равна 1.5%, ширина = L/X = 0.5.
При Z/X = 1.15 нелинейность = 3.7%, L/X = 0.6.
При Z/X = 1.1 нелинейность = 7.5%, L/X = 0.69.
При Z/X > 1.2 провал в середине исчезает, но кривая становится сильно выпуклой и линейная область сильно сокращается.
При Z/X < 1 провал становится слишком большой.
Это всё предварительные результаты, так как здесь не учтено, что при отклонении зайчика его яркость уменьшается (луч через щель проходит наклонно), это приведёт к тому, что оптимальное Z/X будет немного меньше.
Ну и здесь не учтено, что экран можен рассеивать неидеально, что чувствительность сенсоров от угла может быть неидеальной.
В общем, надо оставлять возможность небольшой регулировки Z.
Ну вот как-то так на сегодня.
1. Двухосевой датчик с четырьмя сенсорами - отстой. При отклонении от нуля по одной оси, чувствительность по другой резко падает.
1.1. Круглую дырку для одноосевого датчика делать нельзя - надо делать протяжённую щель.
2. Есть оптимальная геометрия, при которой получается линейная характеристика "сигнал от тангенса угла".
На картинке:
Два сенсора, чувствительная поверхность которых находится на расстоянии Z от белого экрана.
X — расстояние от оси симметрии, до центров сенсоров.
L — расстояние от оси симметрии до центра "зайчика".
Внизу форма кривой - в середине чувствительность принимается за 100%, потом некоторый подъём, а дальше к краю спад.
Границей считается то место, где величина спада равна величине подъёма.
И вот какие результаты по линейности сигнала, который здесь равен просто разности сигналов с сенсоров:
При отношении Z/X = 1.2 нелинейность равна 1.5%, ширина = L/X = 0.5.
При Z/X = 1.15 нелинейность = 3.7%, L/X = 0.6.
При Z/X = 1.1 нелинейность = 7.5%, L/X = 0.69.
При Z/X > 1.2 провал в середине исчезает, но кривая становится сильно выпуклой и линейная область сильно сокращается.
При Z/X < 1 провал становится слишком большой.
Это всё предварительные результаты, так как здесь не учтено, что при отклонении зайчика его яркость уменьшается (луч через щель проходит наклонно), это приведёт к тому, что оптимальное Z/X будет немного меньше.
Ну и здесь не учтено, что экран можен рассеивать неидеально, что чувствительность сенсоров от угла может быть неидеальной.
В общем, надо оставлять возможность небольшой регулировки Z.
Ну вот как-то так на сегодня.
Прикреплённые файлы:

Copyright © Balancer 1997..2023
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
