 Ckona
Ckona

 инфо
инфо инструменты
инструменты

 termostat
termostat


 a_centaurus
a_centaurus

 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/mi/mikroe/img/development-tools/pic/easypic_v7/128x128-crop/thumb_easypic_v7.png)
Кобра III
Теги:
Не переживай !
Почитай Чертока - мне всегда помогает.
Почитай Чертока - мне всегда помогает.



Ckona> Не переживай! Почитай Чертока - мне всегда помогает.
Мне знаком этот рецепт.") Дедушка Дорнбергер тоже хорошо вставляет.
Дедушка Дорнбергер тоже хорошо вставляет.
Мне знаком этот рецепт.
Дедушка Дорнбергер тоже хорошо вставляет.
Очередная попытка реализации оптического датчика положения ВТ из подручных материалов.
Прикреплённые файлы:
В выходные был на базаре, измерил мебельные трубы калибра 50 мм. Наружный диаметр гуляет в пределах 5.0-5.3 мм, причём в разных местах одной трубы можно найти и круглые участки и овальные, но больше 5.3 не было. Мерил у двух продавцов, трубы одинаковые.

Non-conformist> Очередная попытка
И как работает ?
Интересно посмотреть график выходного напряжения в зависимости от поворота, по каждому из каналов.
Поворот можно в миллиметрах мерять, углы небольшие.
И как работает ?
Интересно посмотреть график выходного напряжения в зависимости от поворота, по каждому из каналов.
Поворот можно в миллиметрах мерять, углы небольшие.
Ckona> И как работает?
Работает! Выход получается больше одного вольта при отклонении от упора до упора. Оптопары поддаются регулировке путем разворота фототранзисторов вокруг вертикальной оси (эта ось совпадает со средним выводом фототранзистора). Оба канала настраиваются таким образом, чтобы механическая нейтраль примерно соответствовала электрической.
Ckona> Интересно посмотреть график выходного напряжения в зависимости от поворота, по каждому из каналов.
Сегодня уже не успеваю, но завтра надеюсь выложить графики.
Ckona> Поворот можно в миллиметрах мерять, углы небольшие.
Я планирую укрепить в кардане лазерную указку, а на потоле мишень (я вывешивал ее эскиз выше).
Работает!
Выход получается больше одного вольта при отклонении от упора до упора. Оптопары поддаются регулировке путем разворота фототранзисторов вокруг вертикальной оси (эта ось совпадает со средним выводом фототранзистора). Оба канала настраиваются таким образом, чтобы механическая нейтраль примерно соответствовала электрической.Ckona> Интересно посмотреть график выходного напряжения в зависимости от поворота, по каждому из каналов.
Сегодня уже не успеваю, но завтра надеюсь выложить графики.
Ckona> Поворот можно в миллиметрах мерять, углы небольшие.
Я планирую укрепить в кардане лазерную указку, а на потоле мишень (я вывешивал ее эскиз выше).
Non-conformist> Оптопары поддаются регулировке путем разворота фототранзисторов вокруг вертикальной оси (эта ось совпадает со средним выводом фототранзистора).
В одном из каналов пришлось повернуть излучатель градусов на три-пять от визуальной нейтрали. Иначе на одном из упоров (последние несколько градусов) сигнал практически не изменялся (оптопара как бы входила в насыщение за несколько миллиметров до упора). После регулировки отклик стал симметричным в обе стороны по всей амплитуде отклонения. Видимо, в этом излучателе криво запечатан кристалл.
***
Да, но схема такого датчика таки требует питания 2 х 3 В. Можно ли будет от этого же источника питать и плату МК, например вот так: в качестве сигнальной аналоговой массы (сигнал датчика) сейчас необходимо использовать среднюю точку 2 х 3 В; тогда как в качестве цифровой массы (МК) надо будет использовать "минус" 2 х 3 В (так получатся искомые 6 В). Излишек напряжения питания МК погасить одним-двумя прямосмещенными диодами. Будет ли работать такая схема?
В одном из каналов пришлось повернуть излучатель градусов на три-пять от визуальной нейтрали. Иначе на одном из упоров (последние несколько градусов) сигнал практически не изменялся (оптопара как бы входила в насыщение за несколько миллиметров до упора). После регулировки отклик стал симметричным в обе стороны по всей амплитуде отклонения. Видимо, в этом излучателе криво запечатан кристалл.
***
Да, но схема такого датчика таки требует питания 2 х 3 В. Можно ли будет от этого же источника питать и плату МК, например вот так: в качестве сигнальной аналоговой массы (сигнал датчика) сейчас необходимо использовать среднюю точку 2 х 3 В; тогда как в качестве цифровой массы (МК) надо будет использовать "минус" 2 х 3 В (так получатся искомые 6 В). Излишек напряжения питания МК погасить одним-двумя прямосмещенными диодами. Будет ли работать такая схема?

Пару диодов шоттки, а среднюю точку тоже на АЦП завести для рефренсного измерения.

Serge77> В выходные был на базаре, измерил мебельные трубы калибра 50 мм. Наружный диаметр гуляет в пределах 5.0-5.3 мм
Не заметил поста. Еще раз - на сколько изменяется внешний диаметр трубы? На плюс-минус три десятки? Т.е. он изменяется от 49,7 до 50,3 мм?
Не заметил поста. Еще раз - на сколько изменяется внешний диаметр трубы? На плюс-минус три десятки? Т.е. он изменяется от 49,7 до 50,3 мм?
Это сообщение редактировалось 04.03.2009 в 09:39
termostat> Пару диодов шоттки, а среднюю точку тоже на АЦП завести для рефренсного измерения.
Отлично, значит продолжаем в том же направлении. Подскажите, как лучше и рациональнее (проще) оценить линейность изготовленного датчика?
Мне сейчас кажется, что проще всего описать окружность, скользя "заглушкой РДТТ" по внутренней поверхности трубы. Т.е. надо жестко закрепить трубу, например горизонтально скотчем на стуле, а на стену повесить мишень, представляющую собой стилизацию "велосипедного колеса", спицы которого натыканы через равные угловые промежутки. Взаимным перемещением мишени и стула добиться такого их положения, чтобы описываемая лазером окружность как можно симметричнее накладывалась на "обод" мишени, и была чуть меньше его по диаметру. Настроив таким образом измерительный стенд, нужно будет "перебрать" лазером все "спицы", и составить таблицу, куда занести электрические координаты (в милливольтах) каждой точки. Упор "заглушки РДТТ" о внутреннюю поверхность трубы обеспечит четкую фиксацию пятна лазерной указки и стабильность показаний пары тестеров в каждой интересующей нас точке. Потом по полученной таблице построить окружность, и посмотреть, насколько она отличается от мишени.
Отлично, значит продолжаем в том же направлении. Подскажите, как лучше и рациональнее (проще) оценить линейность изготовленного датчика?
Мне сейчас кажется, что проще всего описать окружность, скользя "заглушкой РДТТ" по внутренней поверхности трубы. Т.е. надо жестко закрепить трубу, например горизонтально скотчем на стуле, а на стену повесить мишень, представляющую собой стилизацию "велосипедного колеса", спицы которого натыканы через равные угловые промежутки. Взаимным перемещением мишени и стула добиться такого их положения, чтобы описываемая лазером окружность как можно симметричнее накладывалась на "обод" мишени, и была чуть меньше его по диаметру. Настроив таким образом измерительный стенд, нужно будет "перебрать" лазером все "спицы", и составить таблицу, куда занести электрические координаты (в милливольтах) каждой точки. Упор "заглушки РДТТ" о внутреннюю поверхность трубы обеспечит четкую фиксацию пятна лазерной указки и стабильность показаний пары тестеров в каждой интересующей нас точке. Потом по полученной таблице построить окружность, и посмотреть, насколько она отличается от мишени.
Non-conformist> Еще раз - на сколько изменяется внешний диаметр трубы? На плюс-минус три десятки? Т.е. он изменяется от 49,7 до 50,3 мм?
Нет, от 5.0 до 5.3. Ну может где-то было не 5.3, а чуть больше, между 5.3 и 5.4.
Меньше 5.0 не было.
Нет, от 5.0 до 5.3. Ну может где-то было не 5.3, а чуть больше, между 5.3 и 5.4.
Меньше 5.0 не было.
Закрепил указку, засунул в трубу кардан.
Прикреплённые файлы:
Скро измерительно изделие можно будет продавать ...


Водный летающий ранец подготовлен к серийному выпуску
Полку водных технических видов спорта (или развлечений — кому как) прибыло. Изобретатель Рэймонд Ли (Raymond Li), живущий в столице Ньюфаундленда Сент-Джонсе (St. John’s), построил опытный образец своего экзотического реактивного ранца, работающего на воде, и договорился о запуске его в производство.// www.membrana.ru
"Об этом устройстве "Мембрана" рассказывала, когда оно было лишь патентом. Напомним только, что новый реактивный ранец – названный теперь JetLev-Flyer – поднимается в воздух силой гигантских струй воды. Заборное устройство, насос и мощный мотор для его привода, а также приличных размеров бак с горючим — всё это находится на небольшом обтекаемом поплавке, соединённом с ранцем длинным и прочным шлангом (он же служит для ограничения высоты подъёма).
В самом же летающем аппарате есть только управляемые сопла. Таким образом, водяной ранец может подолгу нестись над водой и надолго зависать, в отличие от реактивных ранцев "классических", запас горючего в которых исчерпывается в считанные секунды."
Небольшая иллюстрация силы воды
"Are you ready? ARE YOU READY?!!"
Из песни вокально-инструментального ансамбля "Выпрямитель".
Из песни вокально-инструментального ансамбля "Выпрямитель".
Прикреплённые файлы:
NC - с каким угловым шагом выполнены спицы экрана на стене ?
1) При фиксации вых.сигн. датчиков при прочерчивании указкой круга, потом запросто можно определять измерит. х-ки датчиков.
2) Зная геометрию стенда, запросто можно посчитать люфты кардана.
3) Возможно, получатся данные по несоосностях/погрешностях сборки.
Кillik - ты заблудился. Водореактивный ранец обсуждался в водоракетной теме.
Serge77, 29.01.2009 23:02 - вот первое сообщение.
1) При фиксации вых.сигн. датчиков при прочерчивании указкой круга, потом запросто можно определять измерит. х-ки датчиков.
2) Зная геометрию стенда, запросто можно посчитать люфты кардана.
3) Возможно, получатся данные по несоосностях/погрешностях сборки.
Кillik - ты заблудился. Водореактивный ранец обсуждался в водоракетной теме.
Serge77, 29.01.2009 23:02 - вот первое сообщение.
Ckona> NC - с каким угловым шагом выполнены спицы экрана на стене?
Через каждые пять градусов - всего семьдесят две точки (спицы).
Ckona> 1) При фиксации вых.сигн. датчиков при прочерчивании указкой круга, потом запросто можно определять измерит. х-ки датчиков.
Так и сделали. То, что окружность похожа на скругленный квадрат - это полбеды. Самое неприятное состоит в том, что за время снятия показаний (около десяти-пятнадцати минут) - когда сняли семьдесят вторую (последнюю) точку, и решили контрольно проверить первую - оказалось, что "Х" уменьшилась на 10 мВ, а "У" увеличилась на 5 мВ.
Или садится питание (но ток всего 2,5 мА, а батарейки литиевые фотографические); или тепловой (или какой там еще) дрейф фототранзисторов. Уже есть одно соображение на этот счет. В схеме номинал коллекторных резисторов 75 К, и это при питании 6В; т.е. токи коллекторов получаются порядка 100 мкА. Возможно, что эти фототранзисторы в режиме микротоков работают нестабильно...
Ckona> 2) Зная геометрию стенда, запросто можно посчитать люфты кардана.
Да вроде не до люфтов пока...
Ckona> 3) Возможно, получатся данные по несоосностях/погрешностях сборки.
Это вообще нереально имхо. Ведь измеряются углы, а не линейные сдвиги (колец по осям)...
Через каждые пять градусов - всего семьдесят две точки (спицы).
Ckona> 1) При фиксации вых.сигн. датчиков при прочерчивании указкой круга, потом запросто можно определять измерит. х-ки датчиков.
Так и сделали. То, что окружность похожа на скругленный квадрат - это полбеды. Самое неприятное состоит в том, что за время снятия показаний (около десяти-пятнадцати минут) - когда сняли семьдесят вторую (последнюю) точку, и решили контрольно проверить первую - оказалось, что "Х" уменьшилась на 10 мВ, а "У" увеличилась на 5 мВ.
Или садится питание (но ток всего 2,5 мА, а батарейки литиевые фотографические); или тепловой (или какой там еще) дрейф фототранзисторов. Уже есть одно соображение на этот счет. В схеме номинал коллекторных резисторов 75 К, и это при питании 6В; т.е. токи коллекторов получаются порядка 100 мкА. Возможно, что эти фототранзисторы в режиме микротоков работают нестабильно...
Ckona> 2) Зная геометрию стенда, запросто можно посчитать люфты кардана.
Да вроде не до люфтов пока...
Ckona> 3) Возможно, получатся данные по несоосностях/погрешностях сборки.
Это вообще нереально имхо. Ведь измеряются углы, а не линейные сдвиги (колец по осям)...
Прикреплённые файлы:
tilt_sensor_curve.xls (скачать)
[18,5 кБ]
Это сообщение редактировалось 05.03.2009 в 15:00

Non-conformist> Закрепил указку, засунул в трубу кардан.
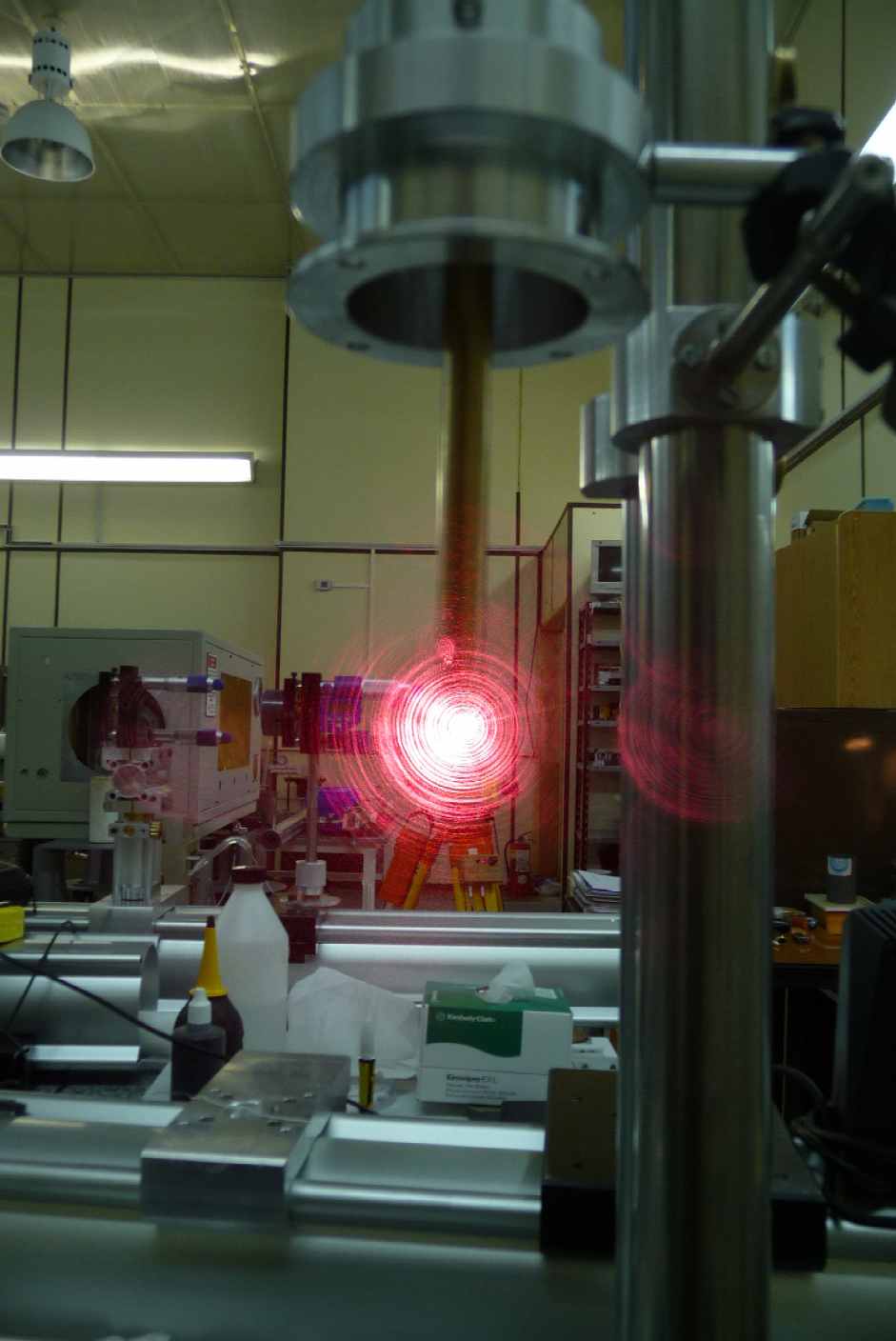
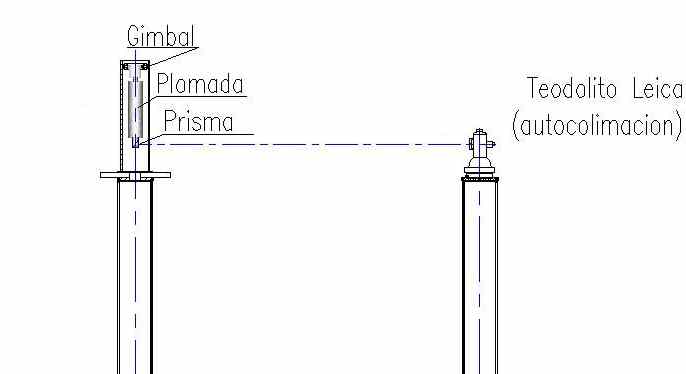
Технические идеи витают в эфире. Это мой вариант дизайна оптического датчика вертикали. (ноябрь 2008). В карданном подвесе установлен физический маятник (бронзовый стержень) с куб-призмой на торце. С привязкой к автоколлимационному теодолиту (1") Leica такой датчик позволяет измерять местную вертикаль крупногабаритного обьекта. Оптическая ось визуализирована излучением LEDa из трубы теодолита. Желаю успехов.
Технические идеи витают в эфире. Это мой вариант дизайна оптического датчика вертикали. (ноябрь 2008). В карданном подвесе установлен физический маятник (бронзовый стержень) с куб-призмой на торце. С привязкой к автоколлимационному теодолиту (1") Leica такой датчик позволяет измерять местную вертикаль крупногабаритного обьекта. Оптическая ось визуализирована излучением LEDa из трубы теодолита. Желаю успехов.
Прикреплённые файлы:

a_centaurus: пожалуйста, можно подробнее ?
Я так понял (или не понял) - призма на нижнем торце бронзового стержня отражает горизонтальный луч лазера под углом 90 градусов вниз, где видно светящуюся точку, вторая точка вертикали - собственно призма. Как выставляется лазер (с теодолитом) на одном уровне с призмой ?
Я так понял (или не понял
) - призма на нижнем торце бронзового стержня отражает горизонтальный луч лазера под углом 90 градусов вниз, где видно светящуюся точку, вторая точка вертикали - собственно призма. Как выставляется лазер (с теодолитом) на одном уровне с призмой ?
a_centaurus> Это мой вариант дизайна оптического датчика вертикали.
Да, впечатляет. Одна секунда - это, наверное, довольно точно? Какую дугу дает одна секунда на расстоянии 10 м?
***
Обнаружил ошибку в монтаже. Вместо резисторов 1К (код 102) я почему-то запаял 10К (103). Возможно из-за этого и получался дрейф показаний. Резисторы 75К заменил на 15К (как в штатной мышиной схеме); неправильные 10К заменил на К20, чтобы сделать Ку, который рекомендуют Хоровиц с Хиллом. В результате получилась прилагаемая схема. Это то, что сейчас имеется по факту.
Вопрос схемотехникам. Почему при таких выходах сигналы не симметричны относительно нуля, а подняты над нулем более чем на вольт (сейчас не помню точно смещение)? Размах сигнала при отклонении кардана от упора до упора при указанных на схеме номиналах составил около 200 мВ и 300 мВ по каналам "Х" и "У" (а был более вольта). Имхо такой размах маловат - схема не будет чувствовать разницы между соседними точками вблизи экстремумов. Но сильно надеюсь на то, что теперь показания будут намного более стабильны, да и линейности прибавится...
Да, впечатляет. Одна секунда - это, наверное, довольно точно? Какую дугу дает одна секунда на расстоянии 10 м?
***
Обнаружил ошибку в монтаже. Вместо резисторов 1К (код 102) я почему-то запаял 10К (103). Возможно из-за этого и получался дрейф показаний. Резисторы 75К заменил на 15К (как в штатной мышиной схеме); неправильные 10К заменил на К20, чтобы сделать Ку, который рекомендуют Хоровиц с Хиллом. В результате получилась прилагаемая схема. Это то, что сейчас имеется по факту.
Вопрос схемотехникам. Почему при таких выходах сигналы не симметричны относительно нуля, а подняты над нулем более чем на вольт (сейчас не помню точно смещение)? Размах сигнала при отклонении кардана от упора до упора при указанных на схеме номиналах составил около 200 мВ и 300 мВ по каналам "Х" и "У" (а был более вольта). Имхо такой размах маловат - схема не будет чувствовать разницы между соседними точками вблизи экстремумов. Но сильно надеюсь на то, что теперь показания будут намного более стабильны, да и линейности прибавится...
Прикреплённые файлы:
tilt_sensor_sch.pdf (скачать)
[11,6 кБ]
Non-conformist> Вопрос схемотехникам. Почему при таких выходах сигналы не симметричны относительно нуля, а подняты над нулем более чем на вольт?
Это очень неудобно: вместе со смещением сигнал не укладывается в предел измерения тестеров "2000 мВ", приходится переключать на "2В", а там уже нет единиц милливольт, самый младший разряд - десятки милливольт.
Как можно решить эту проблему? Увеличить Ку и поделить выход, чтобы максимум показаний укладывался в "2000 мВ"?
Это очень неудобно: вместе со смещением сигнал не укладывается в предел измерения тестеров "2000 мВ", приходится переключать на "2В", а там уже нет единиц милливольт, самый младший разряд - десятки милливольт.
Как можно решить эту проблему? Увеличить Ку и поделить выход, чтобы максимум показаний укладывался в "2000 мВ"?
Ckona> a_centaurus: пожалуйста, можно подробнее ?
Ckona> Я так понял (или не понял) - призма на нижнем торце бронзового стержня отражает горизонтальный луч лазера под углом 90 градусов вниз, где видно светящуюся точку, вторая точка вертикали - собственно призма. Как выставляется лазер (с теодолитом) на одном уровне с призмой ?
Наверное не в тему будет? Система работает следующим образом: Призма-куб (ПК-куб из двух прямоугольных призм, склеенных по гипотенузе и разделённый лантановым полупрозрачным зеркальцем) устанавливается в оправке так, чтобы автоколлимационное отражение от передней грани совпало с перекрестием теодолита. Этим определяется положение обеих частей системы в меридиональной плоскости. Положение ПК в азимутальной (саггитальной) плоскости задаётся точностью изготовления маятника. В случае, когда необходима большая точность позиционирования, применяется второй теодолит, установленный под 90º к 1. Такая система используется, например, при разметке осей спутниковой платформы или другого устройства. Светящаяся точка на призме - часть светового потока, прошедшего через лантановое покрытие без преломления. Используется для контроля. Часть потока, отражённая под 90º вертикально вниз, не видна. Теодолит выставляется в горизонтальное положение, а затем визир теодолита и центр призмы совмещаются по вертикали и горизонтали при помощи юстировочных устройств. На схеме изображён случай использования подобного оптического отвеса при контроле вертикальности установки конкретного сооружения.
Ckona> Я так понял (или не понял
) - призма на нижнем торце бронзового стержня отражает горизонтальный луч лазера под углом 90 градусов вниз, где видно светящуюся точку, вторая точка вертикали - собственно призма. Как выставляется лазер (с теодолитом) на одном уровне с призмой ?Наверное не в тему будет? Система работает следующим образом: Призма-куб (ПК-куб из двух прямоугольных призм, склеенных по гипотенузе и разделённый лантановым полупрозрачным зеркальцем) устанавливается в оправке так, чтобы автоколлимационное отражение от передней грани совпало с перекрестием теодолита. Этим определяется положение обеих частей системы в меридиональной плоскости. Положение ПК в азимутальной (саггитальной) плоскости задаётся точностью изготовления маятника. В случае, когда необходима большая точность позиционирования, применяется второй теодолит, установленный под 90º к 1. Такая система используется, например, при разметке осей спутниковой платформы или другого устройства. Светящаяся точка на призме - часть светового потока, прошедшего через лантановое покрытие без преломления. Используется для контроля. Часть потока, отражённая под 90º вертикально вниз, не видна. Теодолит выставляется в горизонтальное положение, а затем визир теодолита и центр призмы совмещаются по вертикали и горизонтали при помощи юстировочных устройств. На схеме изображён случай использования подобного оптического отвеса при контроле вертикальности установки конкретного сооружения.
Прикреплённые файлы:
Non-conformist> Да, впечатляет. Одна секунда - это, наверное, довольно точно? Какую дугу дает одна секунда на расстоянии 10 м?
Ну, 1" - это погрешность оптико-электронного гониометра теодолита. Значение угла, что отражается на дисплее. Далее надо считать реальное разрешение системы "оператор-инструмент", учитывая характер цели, контраст с фоном, дистанцию, увеличение трубы (30х) и т.д. Например, 1 мм диаметра самосветящийся обьект разрешается на дистанции 15.5 м как дуга в 14". "Нормальный" глаз способен разрешить такой обьект с погрешностью около 3-5". То есть на этой дистанции глаз ещё способен видеть этот обьект, как имеющий поперечник. И с приемлимой точностью совместить перекрестие окуляра с центром видимого диска. Замечу, что разница между 1" теодолитом и, например 5" как между Феррари и Ладой. По цене в том числе. Хотя, казалось бы... Впрочем,eщё большая разница имеет место быть между 0.2" и 1"
Ну, 1" - это погрешность оптико-электронного гониометра теодолита. Значение угла, что отражается на дисплее. Далее надо считать реальное разрешение системы "оператор-инструмент", учитывая характер цели, контраст с фоном, дистанцию, увеличение трубы (30х) и т.д. Например, 1 мм диаметра самосветящийся обьект разрешается на дистанции 15.5 м как дуга в 14". "Нормальный" глаз способен разрешить такой обьект с погрешностью около 3-5". То есть на этой дистанции глаз ещё способен видеть этот обьект, как имеющий поперечник. И с приемлимой точностью совместить перекрестие окуляра с центром видимого диска. Замечу, что разница между 1" теодолитом и, например 5" как между Феррари и Ладой. По цене в том числе. Хотя, казалось бы... Впрочем,eщё большая разница имеет место быть между 0.2" и 1"
Non-conformist> Какую дугу дает одна секунда на расстоянии 10 м?
2.91 мм вроде так -> 10 000 * pi / 180 / 60
2.91 мм вроде так -> 10 000 * pi / 180 / 60
Реклама Google — средство выживания форумов :)

termostat> 2.91 мм вроде так -> 10 000 * pi / 180 / 60
Это минута. Надо ещё на 60 разделить.
Это минута. Надо ещё на 60 разделить.
Copyright © Balancer 1997..2019
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
