-
![[image]](https://www.balancer.ru/cache/sites/com/mi/mikroe/img/development-tools/pic/easypic_v7/128x128-crop/thumb_easypic_v7.png)
Кобра III
Теги:
 RLAN
RLAN

Non-conformist> ... Гхм... Что-то не то.
А чего не то?
Все то. Навеска ДП чуть больше грамма раздолбала мне потолок в офисе полукилограмовой головой.
Если бы не потолок - улетела бы метров на 5. А то и больше.
Чем не ПАД?
А чего не то?
Все то. Навеска ДП чуть больше грамма раздолбала мне потолок в офисе полукилограмовой головой.
Если бы не потолок - улетела бы метров на 5. А то и больше.
Чем не ПАД?


 инфо
инфо инструменты
инструменты
RLAN> Чем не ПАД?
А из чего труба была, и какого объема получился канал "ствола"? Ты вроде уже писал - напомни?
А из чего труба была, и какого объема получился канал "ствола"? Ты вроде уже писал - напомни?


Non-conformist> Получаем соотношение 1 : 1758,3(3)
Это для бездымного пороха. Для дымного будет в 3 раза больше, 1:500-600. Т.е. на 1 кг - 2 г пороха. При хорошей обтюрации и длинном стволе вроде более-менее нормально.
Это для бездымного пороха. Для дымного будет в 3 раза больше, 1:500-600. Т.е. на 1 кг - 2 г пороха. При хорошей обтюрации и длинном стволе вроде более-менее нормально.

 termostat
termostat

Пиротехники в мртиры кладут 10 грамм пороха на 1 кг груза, но у них зазоры "свободные" обычно в мортирах.

Non-conformist> А из чего труба была, и какого объема получился канал "ствола"? Ты вроде уже писал - напомни?
Все где то есть на форуме.
Труба ПВХ электротехническая 63мм. Длина канала- ок 40см.
Все где то есть на форуме.
Труба ПВХ электротехническая 63мм. Длина канала- ок 40см.

Non-conformist>> ... Гхм... Что-то не то.
RLAN> Все то. Навеска ДП...
У меня навеска 0,5гр ДП, чуть не расплющила килограммовый отсек БРЭО об дверь гаража. После уточнённого расчёта, оказалось достаточно 0,25гр.
RLAN> Все то. Навеска ДП...
У меня навеска 0,5гр ДП, чуть не расплющила килограммовый отсек БРЭО об дверь гаража. После уточнённого расчёта, оказалось достаточно 0,25гр.
Прикреплённые файлы:
IGNIT_piro.rar (скачать)
[18,3 кБ]
Non-conformist> Плюс я не уверен в оптимальности выбора оптического принципа.
Только практика критерий истины")
Non-conformist> Ну да. Посмотри мою страницу, статью "Перевернутый маятник"
Почитал. Модель вобщем адекватная, только желательно маятник подобрать поближе к реальной ракете по моменту инерции, по периоду колебания, и актуаторы по силе и по скорости переключения.
То есть соотношение периода колебания и скорости переключения, а также соотношение момента инерции и момента актуатора должны быть близки к тем что будут у ракеты, то есть вероятно проще всего будет сделать ГВМ ракеты в полный размер а актуатор включить через задержку, имитирующую задержку клапанов.
Non-conformist> Согласно микрочиповскому AN964 - совсем небольшая производительность нужна. Обновления управляющих сигналов три-четыре раза в секунду должно вполне хватить.
Вообще-то в AN964 встречаются цифры в 30Гц и 256Гц, маятник длиной 50см. Сказано что период обратной связи должен быть минимум вдвое меньше периода маятника (иначе могут возникнуть колебания)
сейчас заглянул в википедию, по формуле получилось: 1/6.28*sqrt(9.81/0.5)= 0.7Гц
или если пересчитать в период - надо чтобы общая задержка в цепи управления была менее 0.7секунды.
Правда это общая задержка, а сколько у вас будет задержка оборота двигателя и управляющего воздействия?
- Так, навскидку ЕМНИС оборот недорогой сервы где-то порядка 0.3 секунды (вообще для справки, есть в природе специальные скоростные сервы и даже с цифровым управлением, но серва принципиально небыстрая штука, тк там внутрях редуктор понижающий где-то раз в 300 и соответственно чтобы быстро сделать оборот, мотор раскручивается очень серьезно).
Вобщем там чего-то вытянуть скорей всего можно, но считать можно явно не 1/3 секунды а меньше - хорошо-бы сделать прототип одного управляющего сопла и измерить периоды.
Non-conformist> Да много чего - если брать полноразмерный прожект, с минометным стартом, то тут и ТПК, и вышибной заряд, и контроллер запуска маршевого двигателя в воздухе, и расчеты какие-никакие - есть чем заняться.
Я потрясен грандиозностью замысла!
Non-conformist> ПИД-контроллер можно дополнительно разбить на собственно МК и силовую часть (драйвер и Н-мосты).
Ну можно и так.
Non-conformist> Проводка, разъемы - все это требует рациональной компоновки, этим тоже нужно заниматься.
отсюда:
Вопросы организации труда
Только практика критерий истины
Non-conformist> Ну да. Посмотри мою страницу, статью "Перевернутый маятник"
Почитал. Модель вобщем адекватная, только желательно маятник подобрать поближе к реальной ракете по моменту инерции, по периоду колебания, и актуаторы по силе и по скорости переключения.
То есть соотношение периода колебания и скорости переключения, а также соотношение момента инерции и момента актуатора должны быть близки к тем что будут у ракеты, то есть вероятно проще всего будет сделать ГВМ ракеты в полный размер а актуатор включить через задержку, имитирующую задержку клапанов.
Non-conformist> Согласно микрочиповскому AN964 - совсем небольшая производительность нужна. Обновления управляющих сигналов три-четыре раза в секунду должно вполне хватить.
Вообще-то в AN964 встречаются цифры в 30Гц и 256Гц, маятник длиной 50см. Сказано что период обратной связи должен быть минимум вдвое меньше периода маятника (иначе могут возникнуть колебания)
сейчас заглянул в википедию, по формуле получилось: 1/6.28*sqrt(9.81/0.5)= 0.7Гц
или если пересчитать в период - надо чтобы общая задержка в цепи управления была менее 0.7секунды.
Правда это общая задержка, а сколько у вас будет задержка оборота двигателя и управляющего воздействия?
- Так, навскидку ЕМНИС оборот недорогой сервы где-то порядка 0.3 секунды (вообще для справки, есть в природе специальные скоростные сервы и даже с цифровым управлением, но серва принципиально небыстрая штука, тк там внутрях редуктор понижающий где-то раз в 300 и соответственно чтобы быстро сделать оборот, мотор раскручивается очень серьезно).
Вобщем там чего-то вытянуть скорей всего можно, но считать можно явно не 1/3 секунды а меньше - хорошо-бы сделать прототип одного управляющего сопла и измерить периоды.
Non-conformist> Да много чего - если брать полноразмерный прожект, с минометным стартом, то тут и ТПК, и вышибной заряд, и контроллер запуска маршевого двигателя в воздухе, и расчеты какие-никакие - есть чем заняться.
Я потрясен грандиозностью замысла!
Non-conformist> ПИД-контроллер можно дополнительно разбить на собственно МК и силовую часть (драйвер и Н-мосты).
Ну можно и так.
Non-conformist> Проводка, разъемы - все это требует рациональной компоновки, этим тоже нужно заниматься.
Вам (нам) надо создать систему "проект - команда" которая динамически (со временем реакции не более недели) может решать новые задачи. Множество людей потратит из энтузиазма одну рабочую неделю на какую-то совершенно конкретную задачу. Потратить год на демонстратор - НННШ. Выход как я вижу как программу рекрутинга. Есть документ, или там сайт на котором РЕГУЛЯРНО и ОБЯЗАТЕЛЬНО! раз в неделю отображается сетевой график работ и какие работы необходимо выполнить. Чел сам смотрит и планирует свое ДРАГОЦЕННОЕ время и предлагает услуги. Это может быть работа, деньги, прокат оборудования, КОНСУЛЬТАЦИИ по узким вопросам и т.п. Если люди будут видеть что работа делается и в темпе, то многие захотят чтото сделать. А закрытое болото верный способ угробить все.
1. Сразу нужен манагер проекта - бумажная душа. Сразу конкретный человек, который раскидает задачи и будет реализовывать строгую вертикаль власти. Иначе бардак. Внутри рабочих групп руководитель может и не нужен. Там как правило одни художики. Передерутся, поэтому будут коллегиальные решения.
2. Сразу технический писатель - регулярно выпускать нормально оформленную документацию. Это лицо группы. Это на самом деле весь результат работы таких групп - по этим докам потом пойдут другие, если что-то сорвется. Секретить НЕЛЬЗЯ!
3. Сразу список контактных людей из рабочих групп. Сразу вакансии на рабочие группы. Пускай эти группы будут очень помельчеными, с ничтожными задачами, состоять из одного человека, но на большие задачи никто резко не кинется. Нужны вакансии консультантов по узким вопросам. Пусть этот консультант даже перенаправляет вопросы.
4. Паять, точить, программировать многим людям помаленьку. Для этого соответствующая организация.
отсюда:
Вопросы организации труда

Non-conformist>> Плюс я не уверен в оптимальности выбора оптического принципа.
zyxman> Только практика критерий истины
Non-conformist>> Ну да. Посмотри мою страницу, статью "Перевернутый маятник"
zyxman> Почитал. Модель вобщем адекватная, только желательно маятник подобрать поближе к реальной ракете по моменту инерции, по периоду колебания, и актуаторы по силе и по скорости переключения.
Видно, что ты не все прочитал. Тот маятник, что в статье - первое приближение. Потом идет перевернутый маятник с имитацией нагружения кардана стартовыми перегрузками - пружиной на 40 кгс. Задача - стоять и не падать ПОД НАГРУЗКОЙ, т.е. ОГНЕМ проверяются СИЛОВЫЕ и СКОРОСТНЫЕ качества привода (кстати - crucial point, типа или едем дальше, или сливай воду; но я уверен, что все будет в порядке, активаторы ЛЕГКО И РЕЗВО будут дергать нагруженный кардан). Эта установка уже практически готова, стоит в углу, фотки выложены. Потом идет собственно "Кобра" (гидродинамическое моделирование) И/ИЛИ огневое испытание ракеты, закрепленной в кардане на стволе дерева. Так что поэтапность приближения к реальному пуску продумана имхо весьма тщательно. Там достаточно "ступенек", чтобы не споткнуться, даже более чем достаточно.
zyxman> ... а актуатор включить через задержку, имитирующую задержку клапанов.
Какие клапана? Нет там никаких клапанов... Ты чертеж привода в ПДФ открывал?
zyxman> Правда это общая задержка, а сколько у вас будет задержка оборота двигателя и управляющего воздействия?
Здесь участникам проекта необходимо волевым усилием ОТОРВАТЬСЯ от теоретических рассуждений, потому что никому из присутствующих неясна степень их адекватности. Потому что здесь НЕТ специалистов, способных решить систему дифуравнений условия стабилизации сабжа (диапазоны коэффициентов, удовлетворяющих задаче). Одни слова, красивые слова - в этом я уже давно и прочно убедился. Есть, правда, любезно отвечающий на письма профессор Поляков, однако для расчетов ему нужен конкретный объект, точнее его физические параметры. Но когда этот объект будет в наличии, имхо нам окажется не нужен проф. Поляков, потому как в конце того же AN964 просто и доходчиво, на вполне научной основе рассказано, в какую сторону и каким именно образом крутить три крутёлки, "чтоб не падало". Мы с этим имхо и сами справимся, без профессора. А если не справимся, то можно и написать, НО НЕ РАНЬШЕ.
Теперь о том, что ДЕЙСТВИТЕЛЬНО НУЖНО. Нужна РАБОЧАЯ, ОТЛАЖЕННАЯ, ДВУХКАНАЛЬНАЯ плата контроллера, которая бы повторяла характеристики устройства, приведенного в AN964:
1. С достаточно глубокой и плавной регулировкой коэффициентов;
2. Со входом, способным обрабатывать сигналы солнечного датчика;
3. С ЕЩЕ ОДНИМ входом, способным обрабатывать сигналы датчика ПОЛОЖЕНИЯ МОТОРА;
4. Способная тягать активаторы ПОД НАГРУЗКОЙ, т.е. с адекватным силовым каскадом на выходе.
Кстати, такой каскад уже есть, он физически существует - читай материалы топика (фрискейловские интегральные драйвера, выписанные в качестве сэмплов - лежат в тумбочке). КУРАЖА нет! На все остальные вопросы отвечает КОМПЛЕКС ЭКСПЕРИМЕНТОВ, в общих чертах описанный выше, а не сентенции про периоды и миллисекунды. Это единственный путь вылезти из бесконечного болота, о котором ты говоришь. С НОТ же пусть разбираются те, у которых есть в наличии готовые к сотрудничеству клиенты. А в нашем случае всё это насколько правильно, настолько и бессмысленно.
zyxman> Только практика критерий истины
Non-conformist>> Ну да. Посмотри мою страницу, статью "Перевернутый маятник"
zyxman> Почитал. Модель вобщем адекватная, только желательно маятник подобрать поближе к реальной ракете по моменту инерции, по периоду колебания, и актуаторы по силе и по скорости переключения.
Видно, что ты не все прочитал. Тот маятник, что в статье - первое приближение. Потом идет перевернутый маятник с имитацией нагружения кардана стартовыми перегрузками - пружиной на 40 кгс. Задача - стоять и не падать ПОД НАГРУЗКОЙ, т.е. ОГНЕМ проверяются СИЛОВЫЕ и СКОРОСТНЫЕ качества привода (кстати - crucial point, типа или едем дальше, или сливай воду; но я уверен, что все будет в порядке, активаторы ЛЕГКО И РЕЗВО будут дергать нагруженный кардан). Эта установка уже практически готова, стоит в углу, фотки выложены. Потом идет собственно "Кобра" (гидродинамическое моделирование) И/ИЛИ огневое испытание ракеты, закрепленной в кардане на стволе дерева. Так что поэтапность приближения к реальному пуску продумана имхо весьма тщательно. Там достаточно "ступенек", чтобы не споткнуться, даже более чем достаточно.
zyxman> ... а актуатор включить через задержку, имитирующую задержку клапанов.
Какие клапана? Нет там никаких клапанов... Ты чертеж привода в ПДФ открывал?
zyxman> Правда это общая задержка, а сколько у вас будет задержка оборота двигателя и управляющего воздействия?
Здесь участникам проекта необходимо волевым усилием ОТОРВАТЬСЯ от теоретических рассуждений, потому что никому из присутствующих неясна степень их адекватности. Потому что здесь НЕТ специалистов, способных решить систему дифуравнений условия стабилизации сабжа (диапазоны коэффициентов, удовлетворяющих задаче). Одни слова, красивые слова - в этом я уже давно и прочно убедился. Есть, правда, любезно отвечающий на письма профессор Поляков, однако для расчетов ему нужен конкретный объект, точнее его физические параметры. Но когда этот объект будет в наличии, имхо нам окажется не нужен проф. Поляков, потому как в конце того же AN964 просто и доходчиво, на вполне научной основе рассказано, в какую сторону и каким именно образом крутить три крутёлки, "чтоб не падало". Мы с этим имхо и сами справимся, без профессора. А если не справимся, то можно и написать, НО НЕ РАНЬШЕ.
Теперь о том, что ДЕЙСТВИТЕЛЬНО НУЖНО. Нужна РАБОЧАЯ, ОТЛАЖЕННАЯ, ДВУХКАНАЛЬНАЯ плата контроллера, которая бы повторяла характеристики устройства, приведенного в AN964:
1. С достаточно глубокой и плавной регулировкой коэффициентов;
2. Со входом, способным обрабатывать сигналы солнечного датчика;
3. С ЕЩЕ ОДНИМ входом, способным обрабатывать сигналы датчика ПОЛОЖЕНИЯ МОТОРА;
4. Способная тягать активаторы ПОД НАГРУЗКОЙ, т.е. с адекватным силовым каскадом на выходе.
Кстати, такой каскад уже есть, он физически существует - читай материалы топика (фрискейловские интегральные драйвера, выписанные в качестве сэмплов - лежат в тумбочке). КУРАЖА нет! На все остальные вопросы отвечает КОМПЛЕКС ЭКСПЕРИМЕНТОВ, в общих чертах описанный выше, а не сентенции про периоды и миллисекунды. Это единственный путь вылезти из бесконечного болота, о котором ты говоришь. С НОТ же пусть разбираются те, у которых есть в наличии готовые к сотрудничеству клиенты. А в нашем случае всё это насколько правильно, настолько и бессмысленно.
Что касается PR (Вики и прочего оформления), то в качестве рекламы проекта можно задвинуть ролик модели двухплоскостного стабилизатора танковой пушки. Эта неотрывно смотрящая на источник света жужжащая железная хреновина получается, если солнечный датчик укрепить на кардане, вместо мотора. Для рекламы ПИД не нужен, будет вполне достаточно простого П-регулирования. Такое видео зрелищно отобразит ход работ над проектом, продемонстрировав ЖИВОЕ устройство, являющееся органической частью гораздо более дерзкого замысла.
zyxman: EVDO-модем, обеспечивающий высокоскоростное беспроводное подключение к сети, стОит 400 грн:
Забей на свой диалуп и летай по сети как белый человек! Два гига в месяц у них стОят девяносто гривен, а я по акции сорок пять плачУ уже девятый месяц - не нарадуюсь. Дороговато конечно, но "дорога ложка к обеду" - зато на работе инета теперь хоть залейся, т.е. как раз тогда, когда свободного времени дофига. И ни от кого не завишу. Связь ОЧЕНЬ качественная, жопорез по сравнению с ЭТИМ - примерно как твой диалуп с витой парой.
Если будешь брать, то заказывай ОБЫЧНЫЙ USB, чтобы любой комп можно было в инет быстренько воткнуть. Очень удобно!
Забей на свой диалуп и летай по сети как белый человек! Два гига в месяц у них стОят девяносто гривен, а я по акции сорок пять плачУ уже девятый месяц - не нарадуюсь. Дороговато конечно, но "дорога ложка к обеду" - зато на работе инета теперь хоть залейся, т.е. как раз тогда, когда свободного времени дофига. И ни от кого не завишу. Связь ОЧЕНЬ качественная, жопорез по сравнению с ЭТИМ - примерно как твой диалуп с витой парой.
Если будешь брать, то заказывай ОБЫЧНЫЙ USB, чтобы любой комп можно было в инет быстренько воткнуть. Очень удобно!
Non-conformist> Что касается PR (Вики и прочего оформления), то в качестве рекламы проекта можно задвинуть ролик модели двухплоскостного стабилизатора танковой пушки.
Я вики имел в виду не как рекламу, а как уважение к собеседнику в виде экономии его времени.
PS спасибо за совет купить модем. Увы, сейчас лишних 400грн у меня нет, а если-б были - мне проще подключиться к домосети и получить полный анлим за 100грн в месяц.
Я вики имел в виду не как рекламу, а как уважение к собеседнику в виде экономии его времени.
PS спасибо за совет купить модем. Увы, сейчас лишних 400грн у меня нет, а если-б были - мне проще подключиться к домосети и получить полный анлим за 100грн в месяц.
zyxman> ... как уважение к собеседнику в виде экономии его времени.
Я думаю, что здесь необходимо обоюдное уважение, но самое главное - нужен ИНТЕРЕС посетителя. Проект и так достаточно ясно описан в первых постах, описание снабжено картинками и схемами. Если у посетителя нет времени (сильно занят параллельными обсуждениями в нескольких других конференциях), или возможности (инет по телефону), или интереса (все вместе взятое плюс проблемы личного характера) - если в силу этих и других причин он не в состоянии изучить хотя бы основные положения проекта, то что уж тут говорить о сотрудничестве... Никакое уважение в этом случае не поможет, как ты ни лебези и какие суперсодержательные презентации не составляй.
zyxman> PS спасибо за совет купить модем.
Пожалуйста! Главное, чтобы на пользу.
Я думаю, что здесь необходимо обоюдное уважение, но самое главное - нужен ИНТЕРЕС посетителя. Проект и так достаточно ясно описан в первых постах, описание снабжено картинками и схемами. Если у посетителя нет времени (сильно занят параллельными обсуждениями в нескольких других конференциях), или возможности (инет по телефону), или интереса (все вместе взятое плюс проблемы личного характера) - если в силу этих и других причин он не в состоянии изучить хотя бы основные положения проекта, то что уж тут говорить о сотрудничестве... Никакое уважение в этом случае не поможет, как ты ни лебези и какие суперсодержательные презентации не составляй.
zyxman> PS спасибо за совет купить модем.
Пожалуйста! Главное, чтобы на пользу.
zyxman>> ... как уважение к собеседнику в виде экономии его времени.
Non-conformist> Я думаю, что здесь необходимо обоюдное уважение, но самое главное - нужен ИНТЕРЕС посетителя. Проект и так достаточно ясно описан в первых постах, описание снабжено картинками и схемами.
Вот вы не обижайтесь, я вас тут покритикую как раз потому что мне интересен ваш проект
Вы же говорили что народ неохотно принимает участие, так это и говорит что народ нужно мотивировать. Есть много методов мотивации, понятное дело что вам доступны не все методы, например вы не можете дать денег или гарантировать славу навеки :F, значить нужно использовать другие методы - а именно максимально простое вхождение и максимальная доброжелательность - это реально работает.
Чтобы быстро и эффективно включиться в работу нужно иметь представление о текущем состоянии дел, а для этого нужно и первые посты почитать и некоторое количество последних, не факт что маленькое, тк очень много сообщений о каких-то совсем мелких вопросах.
Ну даже если человек уже начинает работать и просто некоторое время не был на форуме, все равно догонять несколько страниц только чтобы узнать что ничего не произошло неудобно, и вам нужно совсем немного времени чтобы добавить такие мелочи как ссылки на ключевые сообщения в первом постинге темы.
Non-conformist> Я думаю, что здесь необходимо обоюдное уважение, но самое главное - нужен ИНТЕРЕС посетителя. Проект и так достаточно ясно описан в первых постах, описание снабжено картинками и схемами.
Вот вы не обижайтесь, я вас тут покритикую как раз потому что мне интересен ваш проект
Вы же говорили что народ неохотно принимает участие, так это и говорит что народ нужно мотивировать. Есть много методов мотивации, понятное дело что вам доступны не все методы, например вы не можете дать денег или гарантировать славу навеки :F, значить нужно использовать другие методы - а именно максимально простое вхождение и максимальная доброжелательность - это реально работает.
Чтобы быстро и эффективно включиться в работу нужно иметь представление о текущем состоянии дел, а для этого нужно и первые посты почитать и некоторое количество последних, не факт что маленькое, тк очень много сообщений о каких-то совсем мелких вопросах.
Ну даже если человек уже начинает работать и просто некоторое время не был на форуме, все равно догонять несколько страниц только чтобы узнать что ничего не произошло неудобно, и вам нужно совсем немного времени чтобы добавить такие мелочи как ссылки на ключевые сообщения в первом постинге темы.
Non-conformist>> А у меня написано, что BAV99 / BAV70 - ИМПУЛЬСНЫЕ диоды.
Xan> Infineon считает, что они For high-speed switching applications.
Это означает что они применимы в импульсных блоках питания и прочих устройствах где важно быстрое переключение.
Xan> Выпрямительные могут (имеют право) быть медленными. Ну, если они 50 Гц выпрямляют.
Xan> Для более высоких частот имеет значение время выключения - один из главных параметров быстродействия.
Там такая кухня: если кто обращал внимание, есть блоки питания (понижающие напряжение с 220В до каких-нить 12В или даже меньше), где стоит обычный трансформатор а дальше выпрямительный мост итд, а есть так называемые импульсные - где стоит мааленькая катушка и целая схема обрамления - отличить "обычный" трансформаторный от импульсного очень легко - в трансформаторном тяжелый большой трансформатор - даже на какие-то 15Вт там чуть не килограмм веса, а импульсный компьютерный на 200Вт весит меньше чем его жестяной корпус.
А все очень просто - чем выше частота на трансформаторе, тем больше через него можно пропустить мощность.
Но строго говоря, у импульсных важна не сама частота а крутизна фронтов или время переключения - там обычно не синусоида а короткие импульсы, следующие с частотой в десятки килогерц, а выходное напряжение регулируется изменением ширины импульсов.
Вот собственно всевозможные импульсные преобразователи (блоки питания, преобразователь питания проца на материнке, электронное зажигание), это и есть 99% всех switching applications, еще небольшой процент это защита транзиторов управляющих соленоидами или электродвигателей от противо-ЭДС индуктивности соленоида/электродвигателя.
Да, я пробовал в импульсный блок питания ставить на выходе обычный выпрямительный диод - в результате этот диод сильно грелся а на выходе БП было какое-то недоразумение вместо его номинального напряжения.
- в результате этот диод сильно грелся а на выходе БП было какое-то недоразумение вместо его номинального напряжения.
Xan> Infineon считает, что они For high-speed switching applications.
Это означает что они применимы в импульсных блоках питания и прочих устройствах где важно быстрое переключение.
Xan> Выпрямительные могут (имеют право) быть медленными. Ну, если они 50 Гц выпрямляют.
Xan> Для более высоких частот имеет значение время выключения - один из главных параметров быстродействия.
Там такая кухня: если кто обращал внимание, есть блоки питания (понижающие напряжение с 220В до каких-нить 12В или даже меньше), где стоит обычный трансформатор а дальше выпрямительный мост итд, а есть так называемые импульсные - где стоит мааленькая катушка и целая схема обрамления - отличить "обычный" трансформаторный от импульсного очень легко - в трансформаторном тяжелый большой трансформатор - даже на какие-то 15Вт там чуть не килограмм веса, а импульсный компьютерный на 200Вт весит меньше чем его жестяной корпус.
А все очень просто - чем выше частота на трансформаторе, тем больше через него можно пропустить мощность.
Но строго говоря, у импульсных важна не сама частота а крутизна фронтов или время переключения - там обычно не синусоида а короткие импульсы, следующие с частотой в десятки килогерц, а выходное напряжение регулируется изменением ширины импульсов.
Вот собственно всевозможные импульсные преобразователи (блоки питания, преобразователь питания проца на материнке, электронное зажигание), это и есть 99% всех switching applications, еще небольшой процент это защита транзиторов управляющих соленоидами или электродвигателей от противо-ЭДС индуктивности соленоида/электродвигателя.
Да, я пробовал в импульсный блок питания ставить на выходе обычный выпрямительный диод
- в результате этот диод сильно грелся а на выходе БП было какое-то недоразумение вместо его номинального напряжения.
Xan> Ну, главный ответ тебе - применяй смело!
Понял, спасибо!
Понял, спасибо!
Радиоканал: два трансивера TR24A (2 x 25 грн) + МК - ATMega32_TQFP (2 х 15 грн)
Сейчас встречался с человеком, у которого эти трансиверы работают в связке с ARM'ом, используя код
http://www.kosmodrom.com.ua/data/TR24A_AT89S5X.zip
без каких бы то ни было изменений и доработок. Он посмотрел даташит ATMega32 и набросал такую табличку соединений:
ATMega32_TQFP__<>____TR24A
pin_44_(SPI)___>_____pin_6
pin_1_(MOSI)___<_____pin_2
pin_2_(MISO)___>_____pin_5
pin_3_(SCK)____>_____pin_4
любой_порт_____<_____RES*
любой_порт_____<_____FIFO
_________
Надо разводить прототип...
Сейчас встречался с человеком, у которого эти трансиверы работают в связке с ARM'ом, используя код
http://www.kosmodrom.com.ua/data/TR24A_AT89S5X.zip
без каких бы то ни было изменений и доработок. Он посмотрел даташит ATMega32 и набросал такую табличку соединений:
ATMega32_TQFP__<>____TR24A
pin_44_(SPI)___>_____pin_6
pin_1_(MOSI)___<_____pin_2
pin_2_(MISO)___>_____pin_5
pin_3_(SCK)____>_____pin_4
любой_порт_____<_____RES*
любой_порт_____<_____FIFO
_________
- Этот человек предпочитает сбрасывать МК программно, не задействуя аппаратный сброс.
Надо разводить прототип...
Это сообщение редактировалось 21.08.2009 в 14:39
Non-conformist> с ARM'ом, используя код ... AT89S без каких бы то ни было изменений и доработок.
чудо 1
Non-conformist> * Этот человек предпочитает сбрасывать МК программно, не задействуя аппаратный сброс.
чудо 2 если про AVR
чудо 1
Non-conformist> * Этот человек предпочитает сбрасывать МК программно, не задействуя аппаратный сброс.
чудо 2 если про AVR
termostat> чудо 1
termostat> чудо 2
Чудо 3 - живет он от меня через два дома.
Чудо 4 - пару месяцев назад из категории моих добрых знакомых он перешел в категорию деловых партнеров (пользуется моими услугами по сборке прототипов и мелкосерийных плат).
Так что имхо можно ожидать и дальнейших чудес. АRM с этим трансивером запускал не он, а его сотрудник; а может и я чего переврал. По сбросу - за что купил, за то продал. Дядька серьезный вообще-то: суммы, фигурирующие в финансовых документах его конторы, говорят сами за себя.
А еще говорят, что чудес не бывает...
termostat> чудо 2
Чудо 3 - живет он от меня через два дома.
Чудо 4 - пару месяцев назад из категории моих добрых знакомых он перешел в категорию деловых партнеров (пользуется моими услугами по сборке прототипов и мелкосерийных плат).
Так что имхо можно ожидать и дальнейших чудес. АRM с этим трансивером запускал не он, а его сотрудник; а может и я чего переврал. По сбросу - за что купил, за то продал. Дядька серьезный вообще-то: суммы, фигурирующие в финансовых документах его конторы, говорят сами за себя.
А еще говорят, что чудес не бывает...

Non-conformist> * Этот человек предпочитает сбрасывать МК программно, не задействуя аппаратный сброс.
Думаю имелось в виду "сбрасывать модуль программно"?
Думаю имелось в виду "сбрасывать модуль программно"?
Дубль.
Это сообщение редактировалось 25.08.2009 в 12:20
alex_zeed> Думаю имелось в виду "сбрасывать модуль программно"?
Да вроде он говорил про МК... Сейчас вспомнил - вроде бы он сказал фразу типа "программный перезапуск в случае зависания", причем речь еще не шла о трансивере... Так мне показалось, по крайней мере... А, НЕТ! Он ведь нарисовал таблицу соединений "МК-трансивер", и В ЭТОЙ ТАБЛИЦЕ у него сброс модуля соединен не с "ресетом" МК, а с "любым портом"! Т.е. получается, что он говорил таки про трансивер.
Больше ничего пока не скажу; если интересно - могу дополнительно расспросить при следующей встрече. А для неё надо хотя бы собрать адаптер, а лучше и развести плату-прототип.
Да вроде он говорил про МК... Сейчас вспомнил - вроде бы он сказал фразу типа "программный перезапуск в случае зависания", причем речь еще не шла о трансивере... Так мне показалось, по крайней мере... А, НЕТ! Он ведь нарисовал таблицу соединений "МК-трансивер", и В ЭТОЙ ТАБЛИЦЕ у него сброс модуля соединен не с "ресетом" МК, а с "любым портом"! Т.е. получается, что он говорил таки про трансивер.
Больше ничего пока не скажу; если интересно - могу дополнительно расспросить при следующей встрече. А для неё надо хотя бы собрать адаптер, а лучше и развести плату-прототип.
Термостат, появилось несколько вопросов по схеме
Кобра [termostat#03.02.07 15:18]
1. Параметры Q1?
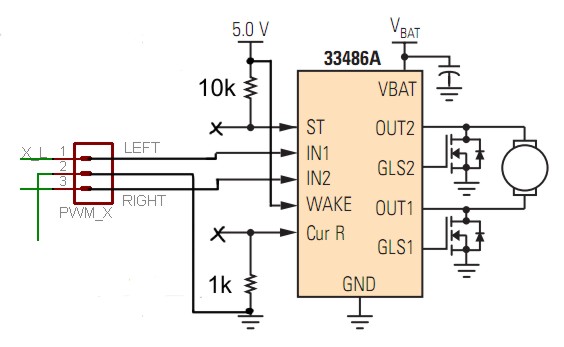
2. Назначение и принцип действия портов PD4, PD5? Начерти, пожалуйста, КОНКРЕТНУЮ схему подключения драйвера 33486 к Меге32-TQFP44?
3. Куда подключены резисторы портов PA5, PA6, PA7?
4. Куда подключены свободные порты МК? Висят в воздухе?
5. Назначение конденсаторов C10 .. C17?
6. Назначение LED1?
7. Нзначение S1?
Даташит 33486:
http://www.freescale.com/files/analog/doc/data_sheet/MC33486.pdf
Кобра [termostat#03.02.07 15:18]
1. Параметры Q1?
2. Назначение и принцип действия портов PD4, PD5? Начерти, пожалуйста, КОНКРЕТНУЮ схему подключения драйвера 33486 к Меге32-TQFP44?
3. Куда подключены резисторы портов PA5, PA6, PA7?
4. Куда подключены свободные порты МК? Висят в воздухе?
5. Назначение конденсаторов C10 .. C17?
6. Назначение LED1?
7. Нзначение S1?
Даташит 33486:
http://www.freescale.com/files/analog/doc/data_sheet/MC33486.pdf
1. Q1 желательно 14,7456 Мгц чтобы все стандартные скорости UART поддерживать и быстро считать. Но можно и 16 Мгц.
2. Назначение и принцип действия портов PD4, PD5 ? Лучше называть их пинмаи или выводами.
PD4 и PD5 это выходы ШИМ сигнала Y и X. А выводы PB0,1,2,3 блокируют через резисторы 56 ом прохождение ШИМ туда куда не надо.
Non-conformist> 3. Куда подключены резисторы портов PA5, PA6, PA7 ?
К выходам датчиков X Y и напряжение "средней точки" для датчиков - V
Non-conformist> 4. Куда подключены свободные порты МК? Висят в воздухе?
Да. Я обычно гребенку штырьков паяю на плату чтоб можно было подключиться при надобности без пайки.
Non-conformist> 5. Назначение конденсаторов C10 .. C17?
Они с резисторами образуют RC фильтры НЧ перед каналами АЦП.
Non-conformist> 6. Назначение LED1?
Универсальный индикатор, для индикации или для отладки. Всегда ставлю на плату - удобно.
Non-conformist> 7. Нзначение S1?
Наверно управлять запоминанием настроек в EEPROM и загрузкой возможно. "Менюшка" может и на ПК высвечиваться а просту команду дать можно и кнопочкой. Можно кнопок добавить на PORTC.
Схема -
=========
Начерти, пожалуйста, КОНКРЕТНУЮ схему подключения драйвера 33486 к Меге32-TQFP44?
Щас занят чуток, но мега32 абсолютно идентична меге16 по выводам - так что по названиям аналогично подключать.
Только я советую DIP и в панельку. Это удобней и размер нормальный. Вот серво контроллер на 24 servo
МК в панельке. Значит можно легко поменять испорченый или поставить ATmega16 ATmega32 ATmega644 ( у последней еще и прерывания на всех ногах почти). Под МК кварц блокировочные конденсаторы и стабилитрон по питанию.
2. Назначение и принцип действия портов PD4, PD5 ? Лучше называть их пинмаи или выводами.
PD4 и PD5 это выходы ШИМ сигнала Y и X. А выводы PB0,1,2,3 блокируют через резисторы 56 ом прохождение ШИМ туда куда не надо.
Non-conformist> 3. Куда подключены резисторы портов PA5, PA6, PA7 ?
К выходам датчиков X Y и напряжение "средней точки" для датчиков - V
Non-conformist> 4. Куда подключены свободные порты МК? Висят в воздухе?
Да. Я обычно гребенку штырьков паяю на плату чтоб можно было подключиться при надобности без пайки.
Non-conformist> 5. Назначение конденсаторов C10 .. C17?
Они с резисторами образуют RC фильтры НЧ перед каналами АЦП.
Non-conformist> 6. Назначение LED1?
Универсальный индикатор, для индикации или для отладки. Всегда ставлю на плату - удобно.
Non-conformist> 7. Нзначение S1?
Наверно управлять запоминанием настроек в EEPROM и загрузкой возможно. "Менюшка" может и на ПК высвечиваться а просту команду дать можно и кнопочкой. Можно кнопок добавить на PORTC.
Схема -

=========
Начерти, пожалуйста, КОНКРЕТНУЮ схему подключения драйвера 33486 к Меге32-TQFP44?
Щас занят чуток, но мега32 абсолютно идентична меге16 по выводам - так что по названиям аналогично подключать.
Только я советую DIP и в панельку. Это удобней и размер нормальный. Вот серво контроллер на 24 servo

МК в панельке. Значит можно легко поменять испорченый или поставить ATmega16 ATmega32 ATmega644 ( у последней еще и прерывания на всех ногах почти). Под МК кварц блокировочные конденсаторы и стабилитрон по питанию.
Это сообщение редактировалось 25.08.2009 в 17:59
Non-conformist>> схему подключения драйвера 33486 к Меге32-TQFP44 ?
Вот схема подключения драйвера электро моторов mc33486 к ПИД контроллеру на ATmega16 схема которого выше. Но в Меге32-TQFP44 такие же названия НУЖНЫХ ножек как и в DIP.
Вот схема подключения драйвера электро моторов mc33486 к ПИД контроллеру на ATmega16 схема которого выше. Но в Меге32-TQFP44 такие же названия НУЖНЫХ ножек как и в DIP.
Прикреплённые файлы:
Copyright © Balancer 1997..2019
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
