 Dmitry_A
Dmitry_A




 инфо
инфо инструменты
инструменты
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/w/w/www.b-domke.de/AviationImages/Huey/Images/128x128-crop/3697.jpg)
«Как оно устроено»: Втулка Белла-Янга
Теги:
Это изобретение инженера фирмы Bell Артура Янга — самая известная реализация двухлопастного НВ с совмещённм шарниром. Её характерной особенностью является гироскопический стабилизатор, смонтированный непосредственно на втулке и включенный в схему управления шагом.
(рисунок из учебника В. Н. Далина и С. В. Михеева «Конструкция вертолётов»)
Стержень стабилизатора 4 через рамку 5 подвешен к валу НВ на шарнире 6 перпендикулярно втулке 3. Тяга 11 от автомата перекоса 23 (на данном рисунке через шлиц-шарниры 15 и 14 и каретку общего шага 25) через дифференциальную качалку 7 связана с рамкой стабилизатора; с поводком 10 лопасти качалка связана тягой 9.
Стабилизатор стремится сохранять плоскость вращения перепендикулярно валу, и при возникновении возмущений передаёт гасящие воздействия на качалку. Это происходит примерно так:
При наклоне АП тяга 11 движет качалку вверх или вниз, туда же движется влекомый тягой 9 поводок, лопасть увеличивает или уменьшает угол атаки. Плоскость вращения НВ наклоняется, на валу появляется опрокидывающий момент. Вращающийся стабилизатор стремится сохранить первоначальное положение, и благодаря шарнирной подвеске это ему поначалу удаётся. При этом точка подвески качалки к рамке смещается в сторону, противоположную движению тяги 11 от АП, из-за чего ход тяги 9 уменьшается, соответственно угол атаки изменяется на меньшую величину. Таким образом, гироскопический стабилизатор демпфирует наклон плоскости вращения НВ.
Когда управляющее воздействие прекращается, опрокидывающий момент исчезает, и стабилизатор вновь стремится занять положение перпендикулярно валу НВ. Чтобы он проделал это без излишних колебаний вокруг равновесного положения, установлены демпферы 13, соединённые с рамкой тягами 12.
В равной мере стабилизатор демпфирует внешние возмущения. К примеру, из-за порыва ветра конус НВ наклонился. Появляется опрокидывающий момент, и стабилизатор стремится сохранить первоначальное положение. Так как при этом точки соединения качалки с рамкой и тягой 11 остаются условно неподвижны, движение взмахнувшей лопасти встречает сопротивление тяги 9, что вызывает уменьшение угла атаки; на опустившейся лопасти (не забываем, что у нас полужёсткий НВ с совмещённым шарниром) угол атаки благодаря симметричной работе стабилизатора соответственно увеличится.
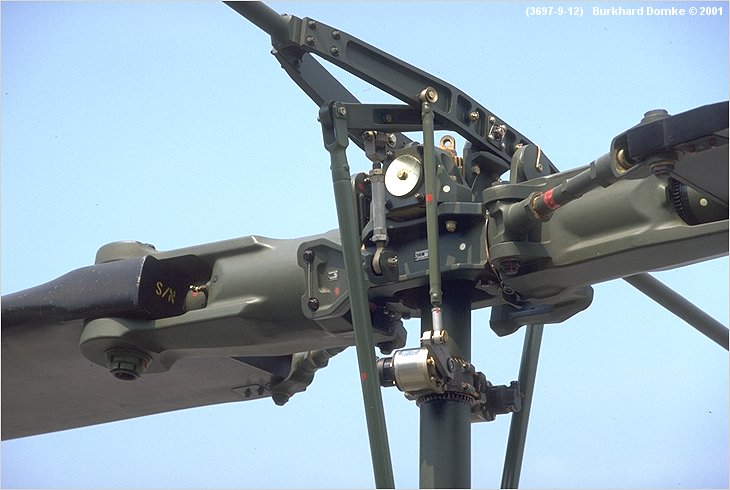
Фото втулки UH-1D. Хорошо видны рамка (5), качалка (7), тяги (слева направо на переднем плане): длинная от автомата перекоса (11), короткая к поводку лопасти (9), несколько более длинная (12) от рамки к демпферу (13).
Конструкция Белла-Янга распространена очень широко, благодаря самой массовой в мире серии UH-1. Тем не менее, в своих более новых разработках, начиная с модели 206, фирма не использует механический стабилизатор. Потому, вероятно, что это всё-таки дополнительные шарнирные соединения, требующие обслуживания и контроля состояния. Задача стабилизации возлагается на автоматику системы управления.
Фото Bell-206. Полужёсткий НВ с совмещённым шарниром, уже без гиростабилизатора.
(рисунок из учебника В. Н. Далина и С. В. Михеева «Конструкция вертолётов»)
Стержень стабилизатора 4 через рамку 5 подвешен к валу НВ на шарнире 6 перпендикулярно втулке 3. Тяга 11 от автомата перекоса 23 (на данном рисунке через шлиц-шарниры 15 и 14 и каретку общего шага 25) через дифференциальную качалку 7 связана с рамкой стабилизатора; с поводком 10 лопасти качалка связана тягой 9.
Стабилизатор стремится сохранять плоскость вращения перепендикулярно валу, и при возникновении возмущений передаёт гасящие воздействия на качалку. Это происходит примерно так:
При наклоне АП тяга 11 движет качалку вверх или вниз, туда же движется влекомый тягой 9 поводок, лопасть увеличивает или уменьшает угол атаки. Плоскость вращения НВ наклоняется, на валу появляется опрокидывающий момент. Вращающийся стабилизатор стремится сохранить первоначальное положение, и благодаря шарнирной подвеске это ему поначалу удаётся. При этом точка подвески качалки к рамке смещается в сторону, противоположную движению тяги 11 от АП, из-за чего ход тяги 9 уменьшается, соответственно угол атаки изменяется на меньшую величину. Таким образом, гироскопический стабилизатор демпфирует наклон плоскости вращения НВ.
Когда управляющее воздействие прекращается, опрокидывающий момент исчезает, и стабилизатор вновь стремится занять положение перпендикулярно валу НВ. Чтобы он проделал это без излишних колебаний вокруг равновесного положения, установлены демпферы 13, соединённые с рамкой тягами 12.
В равной мере стабилизатор демпфирует внешние возмущения. К примеру, из-за порыва ветра конус НВ наклонился. Появляется опрокидывающий момент, и стабилизатор стремится сохранить первоначальное положение. Так как при этом точки соединения качалки с рамкой и тягой 11 остаются условно неподвижны, движение взмахнувшей лопасти встречает сопротивление тяги 9, что вызывает уменьшение угла атаки; на опустившейся лопасти (не забываем, что у нас полужёсткий НВ с совмещённым шарниром) угол атаки благодаря симметричной работе стабилизатора соответственно увеличится.
Фото втулки UH-1D. Хорошо видны рамка (5), качалка (7), тяги (слева направо на переднем плане): длинная от автомата перекоса (11), короткая к поводку лопасти (9), несколько более длинная (12) от рамки к демпферу (13).
Конструкция Белла-Янга распространена очень широко, благодаря самой массовой в мире серии UH-1. Тем не менее, в своих более новых разработках, начиная с модели 206, фирма не использует механический стабилизатор. Потому, вероятно, что это всё-таки дополнительные шарнирные соединения, требующие обслуживания и контроля состояния. Задача стабилизации возлагается на автоматику системы управления.
Фото Bell-206. Полужёсткий НВ с совмещённым шарниром, уже без гиростабилизатора.
Дмитрий, получилось рассмотрение предложенной тов. Янгом системы стабилизации в виде механического гироскопа - его фирменный винт со стержнем поперек втулки несущего винта.
Правда, описание в стиле "цитат из книги" получилось несколько скучноватым. Но с этим всегда сложно: как подать материал, чтобы заинтересовать читателей.
Dmitry_A> Тем не менее, в своих более новых разработках, начиная с модели 206, фирма не использует механический стабилизатор. Потому, вероятно, что это всё-таки дополнительные шарнирные соединения, требующие обслуживания и контроля состояния. Задача стабилизации возлагается на автоматику системы управления.
Скорее всего, автоматическая система лучше справляется со стабилизацией: в нее можно заложить более сложные алгоритмы и ориентировать под различные режимы полета.
Правда, описание в стиле "цитат из книги" получилось несколько скучноватым. Но с этим всегда сложно: как подать материал, чтобы заинтересовать читателей.
Dmitry_A> Тем не менее, в своих более новых разработках, начиная с модели 206, фирма не использует механический стабилизатор. Потому, вероятно, что это всё-таки дополнительные шарнирные соединения, требующие обслуживания и контроля состояния. Задача стабилизации возлагается на автоматику системы управления.
Скорее всего, автоматическая система лучше справляется со стабилизацией: в нее можно заложить более сложные алгоритмы и ориентировать под различные режимы полета.
Timofey> Скорее всего, автоматическая система лучше справляется со стабилизацией: в нее можно заложить более сложные алгоритмы и ориентировать под различные режимы полета.
Интересно, а могут ли существовать режимы (в т.ч. аварийные), в которых такая система "мешает" и ее нужно отключать?
Интересно, а могут ли существовать режимы (в т.ч. аварийные), в которых такая система "мешает" и ее нужно отключать?
Timofey> Правда, описание в стиле "цитат из книги" получилось несколько скучноватым. Но с этим всегда сложно: как подать материал, чтобы заинтересовать читателей.
Тут я старался добросовестно пересказать отрывок из учебника своими словами, так, как сам осмыслил.")
Это как в анекдоте про преподавателя: «В четвёртый раз рассказываю, уже сам понял...»
Тут я старался добросовестно пересказать отрывок из учебника своими словами, так, как сам осмыслил.
Это как в анекдоте про преподавателя: «В четвёртый раз рассказываю, уже сам понял...»
Timofey>> Скорее всего, автоматическая система лучше справляется со стабилизацией: в нее можно заложить более сложные алгоритмы и ориентировать под различные режимы полета.
Aaz> Интересно, а могут ли существовать режимы (в т.ч. аварийные), в которых такая система "мешает" и ее нужно отключать?
В отличии от механического стабилизатора, который включен постоянно, эти системы можно включать и выключать по желанию пилота. Системы еще не настолько умные, чтобы определять, что сейчас наступил тот или иной режим, пилот хочет того-то, и ей необходимо делать то-то. Все проще: пилот вручную включает систему стабилизации (висения или автопилот в ГП), когда ему это необходимо.
Вдобавок к этому, возможности систем стабилизации по управлению вертолетом специально ограничены. В отечественной практике им дается возможность влиять на управление, но не более 20% от возможностей ручного управления. Это сделано для того, чтобы в случае, когда автоматика "поднимет восстание" (потеряет последние мозги и ее заклинит в крайнем положении), у пилота все равно остается возможноть "пересилить" и управлять вертолетом.
Dmitry_A> Это как в анекдоте про преподавателя: «В четвёртый раз рассказываю, уже сам понял...»
Тогда вопрос
Чем принципиально отличается конструкция тов. Янга (стержень на белловской втулке) от конструкции тов. Хиллера (стержня на хиллеровской втулке)?
Aaz> Интересно, а могут ли существовать режимы (в т.ч. аварийные), в которых такая система "мешает" и ее нужно отключать?
В отличии от механического стабилизатора, который включен постоянно, эти системы можно включать и выключать по желанию пилота. Системы еще не настолько умные, чтобы определять, что сейчас наступил тот или иной режим, пилот хочет того-то, и ей необходимо делать то-то. Все проще: пилот вручную включает систему стабилизации (висения или автопилот в ГП), когда ему это необходимо.
Вдобавок к этому, возможности систем стабилизации по управлению вертолетом специально ограничены. В отечественной практике им дается возможность влиять на управление, но не более 20% от возможностей ручного управления. Это сделано для того, чтобы в случае, когда автоматика "поднимет восстание" (потеряет последние мозги и ее заклинит в крайнем положении), у пилота все равно остается возможноть "пересилить" и управлять вертолетом.
Dmitry_A> Это как в анекдоте про преподавателя: «В четвёртый раз рассказываю, уже сам понял...»
Тогда вопрос
Чем принципиально отличается конструкция тов. Янга (стержень на белловской втулке) от конструкции тов. Хиллера (стержня на хиллеровской втулке)?
Реклама Google — средство выживания форумов :)
Timofey> Чем принципиально отличается конструкция тов. Янга (стержень на белловской втулке) от конструкции тов. Хиллера (стержня на хиллеровской втулке)?
А вот этого вопроса я намерен коснуться в следующем выпуске серии «Как оно устроено».")
А вот этого вопроса я намерен коснуться в следующем выпуске серии «Как оно устроено».
Copyright © Balancer 1997..2021
Создано 07.11.2007
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 07.11.2007
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}