 Брат-2
Брат-2
 инфо
инфо инструменты
инструменты a_centaurus
a_centaurus

 RLAN
RLAN



 Атмосфера
Атмосфера




 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/w/w/www.afterwork.com.ua/wp-content/uploads/2011/03/128x128-crop/launcher_a2.jpg)
Обыкновенные водяные ракеты из пластиковых бутылок
Теги:

RLAN> Идея классная, может где то такая конструкция и была, но я не видел.
..
Так как я поверхностно знаком с гироскопом, то решил все же немного с ним познакомиться поближе. Оказалось, что предложенный мной способ стабилизации ракеты отнюдь не новость, о чем и предполагал PLAN. Вот, поэтому URL находится видео, где предлагается то же самое.
Вероятно, дело до практики тоже не дошло, поэтому о возможности использования подобного принципа можно только предполагать.
Познал, что такое прецессия, собственно, о чем и догадывался.
..
Так как я поверхностно знаком с гироскопом, то решил все же немного с ним познакомиться поближе. Оказалось, что предложенный мной способ стабилизации ракеты отнюдь не новость, о чем и предполагал PLAN. Вот, поэтому URL находится видео, где предлагается то же самое.
Вероятно, дело до практики тоже не дошло, поэтому о возможности использования подобного принципа можно только предполагать.
Познал, что такое прецессия, собственно, о чем и догадывался.
Прикреплённые файлы:
Gyroscope_precession.rar (скачать)
[217 кБ]



Ckona> - "управляемый вертикальный старт водяных ракет".
Ckona> Пока что из "железа" ставится задача-минимум: довести до ума проект "Пеликан" и полностью использовать его энергетику.
Посмотрел в прототипах. Water jet vector control. Вот в этом патенте file.qip.ru - хранение и обмен файлами - бесплатно описаны основные случаи. И твой "гвоздик" в т.ч. А также струйные ("a la a-centaurus"), щелевые, экранные и т.д и т.п. Вода, как несжимаемая среда для таких случаев идеально подходит.
С изобретением гироскопа вы уже преуспели, поэтому мне захотелось рассмотреть некую систему уровня 00, основанную на управлении вектором тяги (тангаж-рысканье) в стандартах ТОЛьКО бутылочного борта. То есть, оставаясь внутри доступных и общепринятых технологий. Собствено, можно это принять за шутку. Эскизы системы прилагаются. Идея метода: управление курсом по т/р с целью достижения вертикальности на разгонном участке траектории выведения гидравлической ракеты, производится введением в вытекающую струю рабочего тела, в зоне цилиндрической части выходного насадка (гидросопла) механических активаторов числом 4, расположенных по полуосям т/р ракеты, Введение а. в струю вызывает её отклонение в сторону а. и, тем самым, изменение курса. Активатор вводится в струю через жёсткую связь с одноимённым (по полуоси) аэродинамическим щитком, реагирующим на изменение угла набегающего потока, вызванного, например, отклонением ракеты некоторым сторонним фактором от заданного при старте направления. А.щ. представляет собой систему из двух взаимно-перпендикулярных плоскостей, одной из которых является перо стабилизатора. Вся система крепится на фюзелкяже ракеты при помощи пружинного (плоского) амортизатора, позволяющего за счет своей жесткости отклонение от поверхности ф. на определённый угол. В своей хвостовой части а.щ. имеет свободную связь со сферической поверхностью стержня активатора, который в свою очередь установлен в посадочном месте кругового опояска сопла. Внутри п.м. активатора имеется пружина и опорные перегородки, определяющие свободный ход.
При открытии клапана выхода рабочего тела на старте, все 4 активатора находятся в совместном нейтральном положении, взаимно компенсируя воздействие на струю р.т. При вертикальном подъёме, набегающий поток (при отсутствии бокового ветра) будет одинаково прижимать все 4 аэродинамических щитка. При этом положение активаторов останется скомпенсированным (уменьшение площади сечения надо учесть). Однако, при появлении девиации курса по т/р, когда ракета начинает заваливаться, за счёт изменения угла потока, изменится и сила, действующая на соответствующий а.щ. (в общем виде, конечно). На а..щ. со стороны, противоположной заяваливанию, начнёт действовать большая сила, которая приведёт к воздействию на а.и его выдвижению в струю. Очевидно, что а.щ., находящийся с противоположной стороны, попадёт в "аэродинамическую тень", что приведёт к его отклонению в противоположную сторону (за счёт упругости крепления) и выведению диаметрально-противоположного а. из струи. Результатом будет изменение баланса сил и возникновение перекоса струи в сторону, противоположную заклону. Ракета должна будет вернуться на первоначальный курс. То есть, в предложенном приспособлении реализуется метод автоматического контроля курса гидроракеты.
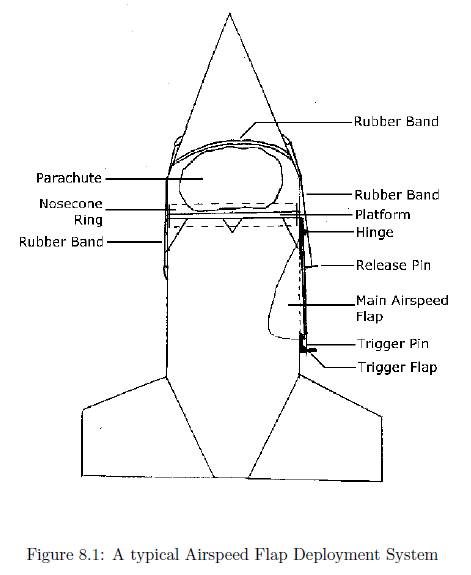
Конечно, это в общих словах описания "изобретения" и попытки вывести его формулу. В качестве ссылки для иллюстрации возникающего эффекта прикладываю рисунок из US Patent. Насколько я понимаю, этот способ мог бы быть реализован на гидроракете, сконструированной в рамках имеющихся "простых бутылочных технологий". Хотя, узел кольцевой державки активаторов я видел изготовленным на токарно-фрезерном станке. То есть, точится из любой пластмассы кольцо прямоуг. сечения, которое затем рассверливается по 4 направлениям, для получения направляющих гнёзд. Также точатся 4 крышки. Крепление их хорошо бы делать резьбовым, но и винтовое сойдёт. Для активаторов можно подобрать подходящие решения. Вплоть до деревянных. Собственно, в любом случае "thrust vector control system" на коленке не сделаешь.
Ckona> Пока что из "железа" ставится задача-минимум: довести до ума проект "Пеликан" и полностью использовать его энергетику.
Посмотрел в прототипах. Water jet vector control. Вот в этом патенте file.qip.ru - хранение и обмен файлами - бесплатно описаны основные случаи. И твой "гвоздик" в т.ч. А также струйные ("a la a-centaurus"), щелевые, экранные и т.д и т.п. Вода, как несжимаемая среда для таких случаев идеально подходит.
С изобретением гироскопа вы уже преуспели, поэтому мне захотелось рассмотреть некую систему уровня 00, основанную на управлении вектором тяги (тангаж-рысканье) в стандартах ТОЛьКО бутылочного борта. То есть, оставаясь внутри доступных и общепринятых технологий. Собствено, можно это принять за шутку. Эскизы системы прилагаются. Идея метода: управление курсом по т/р с целью достижения вертикальности на разгонном участке траектории выведения гидравлической ракеты, производится введением в вытекающую струю рабочего тела, в зоне цилиндрической части выходного насадка (гидросопла) механических активаторов числом 4, расположенных по полуосям т/р ракеты, Введение а. в струю вызывает её отклонение в сторону а. и, тем самым, изменение курса. Активатор вводится в струю через жёсткую связь с одноимённым (по полуоси) аэродинамическим щитком, реагирующим на изменение угла набегающего потока, вызванного, например, отклонением ракеты некоторым сторонним фактором от заданного при старте направления. А.щ. представляет собой систему из двух взаимно-перпендикулярных плоскостей, одной из которых является перо стабилизатора. Вся система крепится на фюзелкяже ракеты при помощи пружинного (плоского) амортизатора, позволяющего за счет своей жесткости отклонение от поверхности ф. на определённый угол. В своей хвостовой части а.щ. имеет свободную связь со сферической поверхностью стержня активатора, который в свою очередь установлен в посадочном месте кругового опояска сопла. Внутри п.м. активатора имеется пружина и опорные перегородки, определяющие свободный ход.
При открытии клапана выхода рабочего тела на старте, все 4 активатора находятся в совместном нейтральном положении, взаимно компенсируя воздействие на струю р.т. При вертикальном подъёме, набегающий поток (при отсутствии бокового ветра) будет одинаково прижимать все 4 аэродинамических щитка. При этом положение активаторов останется скомпенсированным (уменьшение площади сечения надо учесть). Однако, при появлении девиации курса по т/р, когда ракета начинает заваливаться, за счёт изменения угла потока, изменится и сила, действующая на соответствующий а.щ. (в общем виде, конечно). На а..щ. со стороны, противоположной заяваливанию, начнёт действовать большая сила, которая приведёт к воздействию на а.и его выдвижению в струю. Очевидно, что а.щ., находящийся с противоположной стороны, попадёт в "аэродинамическую тень", что приведёт к его отклонению в противоположную сторону (за счёт упругости крепления) и выведению диаметрально-противоположного а. из струи. Результатом будет изменение баланса сил и возникновение перекоса струи в сторону, противоположную заклону. Ракета должна будет вернуться на первоначальный курс. То есть, в предложенном приспособлении реализуется метод автоматического контроля курса гидроракеты.
Конечно, это в общих словах описания "изобретения" и попытки вывести его формулу. В качестве ссылки для иллюстрации возникающего эффекта прикладываю рисунок из US Patent. Насколько я понимаю, этот способ мог бы быть реализован на гидроракете, сконструированной в рамках имеющихся "простых бутылочных технологий". Хотя, узел кольцевой державки активаторов я видел изготовленным на токарно-фрезерном станке. То есть, точится из любой пластмассы кольцо прямоуг. сечения, которое затем рассверливается по 4 направлениям, для получения направляющих гнёзд. Также точатся 4 крышки. Крепление их хорошо бы делать резьбовым, но и винтовое сойдёт. Для активаторов можно подобрать подходящие решения. Вплоть до деревянных. Собственно, в любом случае "thrust vector control system" на коленке не сделаешь.
Прикреплённые файлы:

Брат-2> Получается, что если маховик поместить в центр кардана, а остальное как в предыдущем варианте то схема в теории работоспособна. Конечно, нужны практические эксперименты, но если не задаваться целью точного выдерживания вертикали, то по указанной схеме можно попробовать построить прототип.
Мы немного о разном говорим.
То, что гироскоп в кардановом подвесе использовать можно догадались намного раньше, чем родились наши отцы")
Брат-2> Так как я поверхностно знаком с гироскопом, то решил все же немного с ним познакомиться поближе. Оказалось, что предложенный мной способ стабилизации ракеты отнюдь не новость, о чем и предполагал PLAN. Вот, поэтому URL находится видео, где предлагается то же самое.
Почему ПЛАН ?
Ролик, конечно, оставляет желать лучшего. Полно нормальных роликов в стиле научпоп.
Но я говорил о том, что не знаю, как с внутренней рамки гироскопа механически предавать управляющее усилие на 2ю ось.
А в твоей схеме это решается, правда возникает системная ошибка, не связанная с работой стабилизаторов, но при хорошем гироскопе и ±10 секундах полета до апогея на это можно закрыть глаза.
Мы немного о разном говорим.
То, что гироскоп в кардановом подвесе использовать можно догадались намного раньше, чем родились наши отцы
Брат-2> Так как я поверхностно знаком с гироскопом, то решил все же немного с ним познакомиться поближе. Оказалось, что предложенный мной способ стабилизации ракеты отнюдь не новость, о чем и предполагал PLAN. Вот, поэтому URL находится видео, где предлагается то же самое.
Почему ПЛАН ?
Ролик, конечно, оставляет желать лучшего. Полно нормальных роликов в стиле научпоп.
Но я говорил о том, что не знаю, как с внутренней рамки гироскопа механически предавать управляющее усилие на 2ю ось.
А в твоей схеме это решается, правда возникает системная ошибка, не связанная с работой стабилизаторов, но при хорошем гироскопе и ±10 секундах полета до апогея на это можно закрыть глаза.
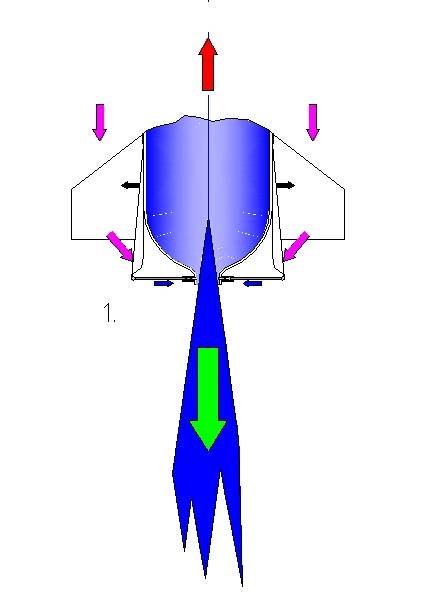
a_centaurus> При вертикальном подъёме, набегающий поток (при отсутствии бокового ветра) будет одинаково прижимать все 4 аэродинамических щитка.
1. Вертикальный полёт в отсутствии возмущений. Направление струи совпадает с осью ракеты и вектором скорости.
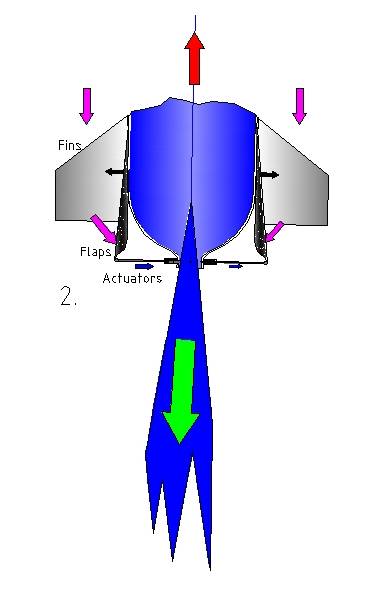
2. Реакция пары аэродинамических щитков на изменение курса, приводящая к наклону струи и возникновению возвращающего момента. Очевидно, что при возвращении на курс система должна вернуться в равновесие. До следующей пертурбации курса.
1. Вертикальный полёт в отсутствии возмущений. Направление струи совпадает с осью ракеты и вектором скорости.
2. Реакция пары аэродинамических щитков на изменение курса, приводящая к наклону струи и возникновению возвращающего момента. Очевидно, что при возвращении на курс система должна вернуться в равновесие. До следующей пертурбации курса.
Прикреплённые файлы:
a_centaurus> ...
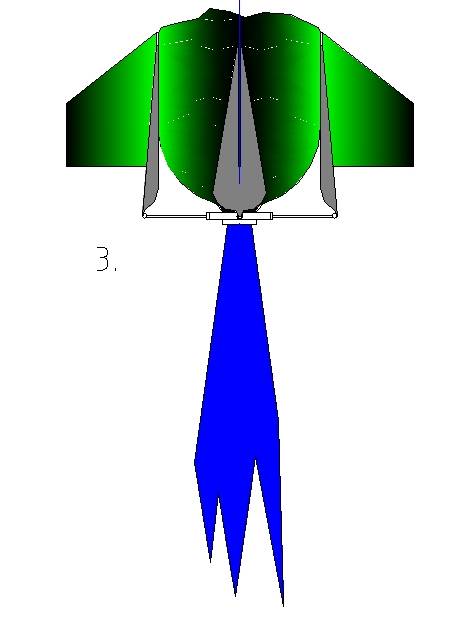
3. Активаторы - увеличено.
3. Активаторы - увеличено.
Прикреплённые файлы:
a_centaurus> Вот в этом патенте описаны основные случаи.
К сожалению, файл скачивается без расширения.
Внутри файла написано, что это *.pdf.
После "приписывания" этого расширения файл открывается в виде сплошного черного поля.
То есть все равно не читается.
Раньше такого "нечитания" не было.
Какой номер этого патента ?
К сожалению, файл скачивается без расширения.
Внутри файла написано, что это *.pdf.
После "приписывания" этого расширения файл открывается в виде сплошного черного поля.
То есть все равно не читается.
Раньше такого "нечитания" не было.
Какой номер этого патента ?
a_centaurus> управление производится введением в струю рабочего тела механических активаторов. Активатор вводится через жёсткую связь с аэродинамическим щитком.
Есть сомнения в аэродинамической части этой идеи.
а)Щитки находятся в (скорее всего) турбулентной зоне,
б)усилие для перемещения активаторов может оказаться недостаточным.
Проверяется легко, с помощью шланга и вентилятора.
Представляет интерес конструктив подвижной части,
"органически" вписывающийся в сопловую часть бутылочной ракеты.
Есть сомнения в аэродинамической части этой идеи.
а)Щитки находятся в (скорее всего) турбулентной зоне,
б)усилие для перемещения активаторов может оказаться недостаточным.
Проверяется легко, с помощью шланга и вентилятора.
Представляет интерес конструктив подвижной части,
"органически" вписывающийся в сопловую часть бутылочной ракеты.

Ckona> К сожалению, файл скачивается без расширения.
Ckona> Внутри файла написано, что это *.pdf.
Ckona> После "приписывания" этого расширения файл открывается в виде сплошного черного поля.
Нормально открылся, может в спешке неправильно переписал, или адоб ридер старый? Вот такой:
Ckona> Внутри файла написано, что это *.pdf.
Ckona> После "приписывания" этого расширения файл открывается в виде сплошного черного поля.
Нормально открылся, может в спешке неправильно переписал, или адоб ридер старый? Вот такой:
Прикреплённые файлы:
US Patent 2010023.pdf (скачать)
[181 кБ]
Атмосфера> Нормально открылся, может в спешке неправильно переписал, или адоб ридер старый? Вот такой:
http://albe76.newmail.ru/US20100237165.pdf
А здесь? Да, скорее всего скачай новый АР. Patent searching недавно поменяли версию, на более современную.
Ну и что, что в турбулентной зоне? Все флапсы на тех же водяных ракетах (см в Bottle Rockets Handbook) находятся в тех же условиях и прекрасно работают. Речь ведь идет о миллиметровом диапазоне подвижек. Естественно, проверять нужно и можно. Я использовал направленную струю из компрессора. С замером скорости потока.
http://albe76.newmail.ru/US20100237165.pdf
А здесь? Да, скорее всего скачай новый АР. Patent searching недавно поменяли версию, на более современную.
Ну и что, что в турбулентной зоне? Все флапсы на тех же водяных ракетах (см в Bottle Rockets Handbook) находятся в тех же условиях и прекрасно работают. Речь ведь идет о миллиметровом диапазоне подвижек. Естественно, проверять нужно и можно. Я использовал направленную струю из компрессора. С замером скорости потока.
Прикреплённые файлы:
Это сообщение редактировалось 04.11.2011 в 00:54
Предполагаю, что вся проблема в малом количестве времени работы первой ступени, при этом предлагаемый УВТ, очевидно, будет иметь незначительный момент для стабилизации.
Ckona> приступил к изготовлению внутренней опоры для разгонной трубки.
После основательного макетирования, остановился на "естественном" варианте - на склеенных бутылках. Заодно дал волю жадности, доведя заправочный объем до 6 литров.
Склеивается три секции. Средняя обеспечивает "вторую" точку опоры для разгонной трубки.
На фото видны окна для прохода воды.
После основательного макетирования, остановился на "естественном" варианте - на склеенных бутылках. Заодно дал волю жадности, доведя заправочный объем до 6 литров.
Склеивается три секции. Средняя обеспечивает "вторую" точку опоры для разгонной трубки.
На фото видны окна для прохода воды.
Прикреплённые файлы:
Ckona> Склеивается три секции.
А вот и третья секция "посажена" !
Потом еще снаружи будут доклеены усиливающие "пояса" и "торец".
Стержень центрирует всю "башню".
А вот и третья секция "посажена" !
Потом еще снаружи будут доклеены усиливающие "пояса" и "торец".
Стержень центрирует всю "башню".
Прикреплённые файлы:
...
Ckona> Стержень центрирует всю "башню".
Хорошая башня, главное, чтобы ее не снесло!
По поводу управляемого вертикального старта пришел к выводу, что затея в рамках наших ракет не осуществима. Дополнительной проблемой является неконтролируемое вращение корпуса ракеты вокруг продольной оси, то есть корректировку нужно выполнять и с учетом этого фактора, а это уже полный пипец!
Ckona> Стержень центрирует всю "башню".
Хорошая башня, главное, чтобы ее не снесло!
По поводу управляемого вертикального старта пришел к выводу, что затея в рамках наших ракет не осуществима. Дополнительной проблемой является неконтролируемое вращение корпуса ракеты вокруг продольной оси, то есть корректировку нужно выполнять и с учетом этого фактора, а это уже полный пипец!
Брат-2> Дополнительной проблемой является неконтролируемое вращение корпуса ракеты вокруг продольной оси, то есть корректировку нужно выполнять и с учетом этого фактора, а это уже полный пипец!
Твой гироскоп с приводами на рули будет автоматически "учитывать" вращение.
Твой гироскоп с приводами на рули будет автоматически "учитывать" вращение.


Брат-2> Дополнительной проблемой является неконтролируемое вращение корпуса ракеты вокруг продольной оси.
Это потому что ты находишься "в плену у магнитного поля", то есть представляешь опорное направление сбоку, под углом к оси ракеты.
А представь, что ракета должна лететь точно туда, куда "смотрит" ее ось.
При повороте ракеты вокруг продольной оси вместе с ней повернутся и сенсоры, и органы "руления", и "ошибка" в направлении движения - которое, собственно, и корректируется.
Это потому что ты находишься "в плену у магнитного поля", то есть представляешь опорное направление сбоку, под углом к оси ракеты.
А представь, что ракета должна лететь точно туда, куда "смотрит" ее ось.
При повороте ракеты вокруг продольной оси вместе с ней повернутся и сенсоры, и органы "руления", и "ошибка" в направлении движения - которое, собственно, и корректируется.
Ckona> Это потому что ты находишься "в плену у магнитного поля"....
Нет, я нахожусь в плену реальности, поэтому прорабатываю варианты, как осуществить затею на практике. Конечно, система с силовым гироскопом автоматическая, собственно так и задумывалось, но до апогея ракета успеет сделать до 10 и более оборотов при этом рули должны синхронно с вращением перекладываться в противоположные положения. Непонятно, что будет с прецессией гироскопа, правда она будет накапливаться с противоположными знаками и возможно самокомпенсироваться. Есть желание осуществить затею, тем более, что только практическая реализация даст ответы на вопросы, но сомневаюсь в целесообразности подобной работы.
Сегодня вспомнил прошлое и выполнил несколько соединений бутылок без термоформирования дна. Ужас, все получилось криво и хлипко, лучше буду взрываться, но жить красиво!
Нет, я нахожусь в плену реальности, поэтому прорабатываю варианты, как осуществить затею на практике. Конечно, система с силовым гироскопом автоматическая, собственно так и задумывалось, но до апогея ракета успеет сделать до 10 и более оборотов при этом рули должны синхронно с вращением перекладываться в противоположные положения. Непонятно, что будет с прецессией гироскопа, правда она будет накапливаться с противоположными знаками и возможно самокомпенсироваться. Есть желание осуществить затею, тем более, что только практическая реализация даст ответы на вопросы, но сомневаюсь в целесообразности подобной работы.
Сегодня вспомнил прошлое и выполнил несколько соединений бутылок без термоформирования дна. Ужас, все получилось криво и хлипко, лучше буду взрываться, но жить красиво!

NeutronS
новичок
Привет!
Заинтересовала тема. Хочу спросить уважаемых форумчан по поводу оптимизации параметров одноступенчатой ракеты.
В идеале и в первом приближении у нас в задачу входят следующие величины:
1. Объём ракеты. Действительно чем больше, тем выше?
2. Отношение объёма воды к объёму воздуха в корпусе.
3. Диаметр сопла. Тут есть оптимум, т.к. маленькая дырочка не подымет агрегат, а большая всё сразу выплюнет...
4. Давление воздуха. Ну тут вроде всё понятно - чем больше, тем лучше (до предела прочности бутылки, т.е. до 10 атм.)
Как по вашему, это всё нужно подбирать экспериментально или есть какие-то практические (теоретические) соображения на этот счёт?
P.S. Чой-то туплю. Как сменить аваторку?
Заинтересовала тема. Хочу спросить уважаемых форумчан по поводу оптимизации параметров одноступенчатой ракеты.
В идеале и в первом приближении у нас в задачу входят следующие величины:
1. Объём ракеты. Действительно чем больше, тем выше?
2. Отношение объёма воды к объёму воздуха в корпусе.
3. Диаметр сопла. Тут есть оптимум, т.к. маленькая дырочка не подымет агрегат, а большая всё сразу выплюнет...
4. Давление воздуха. Ну тут вроде всё понятно - чем больше, тем лучше (до предела прочности бутылки, т.е. до 10 атм.)
Как по вашему, это всё нужно подбирать экспериментально или есть какие-то практические (теоретические) соображения на этот счёт?
P.S. Чой-то туплю. Как сменить аваторку?
Это сообщение редактировалось 11.11.2011 в 09:13
NeutronS> Заинтересовала тема. Хочу спросить уважаемых форумчан по поводу оптимизации параметров одноступенчатой ракеты.
1. Большая ракета летает выше, при прочих равных условиях.
2. Для каждого соотношения "сухой" массы ракеты и ее объема существует оптимальное соотношение объема воды и воздуха. Диапазон - от 1/6 до 3/4.
3. Диаметр сопла определяет тягу и время работы "двигателя". Кроме очевидного "полетит-не полетит", выбор сопла зависит от целевого назначения аппарата/ступени.
4. 10 атм - рванет в половине случаев. Удельный импульс пропорционален корню квадратному от давления.
4,5 - wait, please
Одобряю решение сначала заниматься одноступенчатой ракетой.
1. Большая ракета летает выше, при прочих равных условиях.
2. Для каждого соотношения "сухой" массы ракеты и ее объема существует оптимальное соотношение объема воды и воздуха. Диапазон - от 1/6 до 3/4.
3. Диаметр сопла определяет тягу и время работы "двигателя". Кроме очевидного "полетит-не полетит", выбор сопла зависит от целевого назначения аппарата/ступени.
4. 10 атм - рванет в половине случаев. Удельный импульс пропорционален корню квадратному от давления.
4,5 - wait, please
Одобряю решение сначала заниматься одноступенчатой ракетой.
NeutronS
новичок
Ckona> 3. Диаметр сопла определяет тягу и время работы "двигателя". Кроме очевидного "полетит-не полетит", выбор сопла зависит от целевого назначения аппарата/ступени.
Ckona> 4,5 - wait, please
Ckona, спасибо за оперативный ответ.
По третьему пункту. Есть варианты для одноступенчатой ракеты, или просто "дырочка"? Очень интересно узнать, имеется ли зависимость оптимального размера отверстия от параметров ракеты. Например давления? Кажется, что при бОльших давлениях и прочих равных условий, выгодно уменьшать диаметр сопла, т.к. увеличивается время работы двигателя... и ракета подымется выше.
Не понял по вашему "...4,5 - wait, please" что это было?
NeutronS> Не понял по вашему "...4,5 - wait, please" что это было?
Это значит, что подробный ответ будет позже.
NeutronS> выгодно уменьшать диаметр сопла, т.к. увеличивается время работы двигателя... и ракета подымется выше.
Нет.
Сложнее.
На пальцах: если увеличивать время работы, придется расходовать энергию на подъем расходной массы (воды). Если уменьшать - растут гидравлические потери в сопле и аэродинамические потери вследствие высокой скорости ракеты.
Кое-что можешь прочитать здесь - увы, не закончено.
Это значит, что подробный ответ будет позже.
NeutronS> выгодно уменьшать диаметр сопла, т.к. увеличивается время работы двигателя... и ракета подымется выше.
Нет.
Сложнее.
На пальцах: если увеличивать время работы, придется расходовать энергию на подъем расходной массы (воды). Если уменьшать - растут гидравлические потери в сопле и аэродинамические потери вследствие высокой скорости ракеты.
Кое-что можешь прочитать здесь - увы, не закончено.
NeutronS
новичок
Ckona> Кое-что можешь прочитать здесь - увы, не закончено.
Спасибо, гляну.
Всё-таки очень хочится пощупать тему в формулах. Не в сложных - с Рейнольдсами и коэффициентами сужения струи, - а по простому в первом, грубом приближении. Что бы почувтвовать, покрутить "ручки управления".
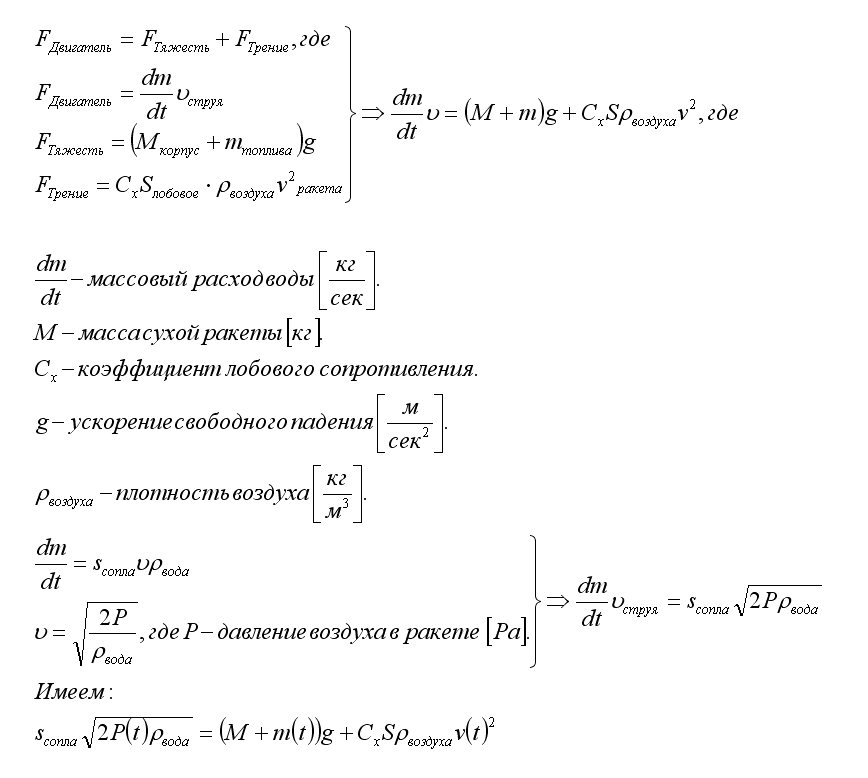
Тут наверное нужно начать с уравнения движения ракетой не как сферического коня в глубоком вакууме, а с учётом сил сопротивления об воздух. Типа, влевой части пишем силу толкающую ракету к звёздам, а вправой - силу тяжести и силу трения.
Эх! - красиво получилось. Нужно ещё расписать в явном виде всё, что зависит от времени.
Спасибо, гляну.
Всё-таки очень хочится пощупать тему в формулах. Не в сложных - с Рейнольдсами и коэффициентами сужения струи, - а по простому в первом, грубом приближении. Что бы почувтвовать, покрутить "ручки управления".
Тут наверное нужно начать с уравнения движения ракетой не как сферического коня в глубоком вакууме, а с учётом сил сопротивления об воздух. Типа, влевой части пишем силу толкающую ракету к звёздам, а вправой - силу тяжести и силу трения.
Эх! - красиво получилось. Нужно ещё расписать в явном виде всё, что зависит от времени.
Прикреплённые файлы:
NeutronS> Как сменить аваторку?
Пыцаешь себя по левому глазу (на аватаре).
Регистрируешься в верхней левой стороне.
Ищешь внизу по центру надпись "профиль на старом форуме" и пыцаешь по ней.
В области "Профиль" (слева) пыцаешь по надписи "индивидуальный".
Дальше - самостоятельно.
Пыцаешь себя по левому глазу (на аватаре).
Регистрируешься в верхней левой стороне.
Ищешь внизу по центру надпись "профиль на старом форуме" и пыцаешь по ней.
В области "Профиль" (слева) пыцаешь по надписи "индивидуальный".
Дальше - самостоятельно.
NeutronS
новичок
NeutronS>> Как сменить аваторку?
Ckona> Пыцаешь себя по левому глазу (на аватаре).
Теперь у меня левый глаз отличается от правого (с первого раза не получилось..., да с последнего тоже:-) Видно не судьба.
Ладно, не сильно-то и хотелось. Буду с лейкопластырем вместо рта!
Короче, получилась у меня вот такая вот системка из двух уравнений. Первое описывает динамику изменения давления внутри балона при реактивном движении как функцию времени P(t). Второе - собственно уравнение движения относительно ускорения а(t).
Конечно, решить это звероподобное уравнение аналитически не реально. Я точно не могу. Но можно долбануть его числено. Щас попробую.
Прикреплённые файлы:
Реклама Google — средство выживания форумов :)
NeutronS> Теперь у меня левый глаз отличается от правого (с первого раза не получилось..., да с
Вот здесь, надеюсь ссылка правильно сработает
// balancer.ru
Вот здесь, надеюсь ссылка правильно сработает
Информация / Форумы Balancer`а
Форумы Balancer'а и Авиабазы. Свободное общение на всевозможные интересные темы. Военная и гражданская техника, авиация, космонавтика, компютеры и информационные технологии, Linux, люди, страны, политика, просто радости и горести жизни. У нас есть всё!// balancer.ru
Copyright © Balancer 1997..2024
Создано 24.04.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 24.04.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
