 Serg Ivanov
Serg Ivanov
 инфо
инфо инструменты
инструменты

 off-topic-off
off-topic-off







 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/ri/ria/img22/cdn11/i/128x128-crop/ria_social.png)
Система морской космической разведки и целеуказания
Легенда и др.Теги:

Система морской космической разведки и целеуказания, взято из:
Прикреплённые файлы:


продолжение
Прикреплённые файлы:
окончание
Прикреплённые файлы:
Сейчас летает, разрешение от 1м:

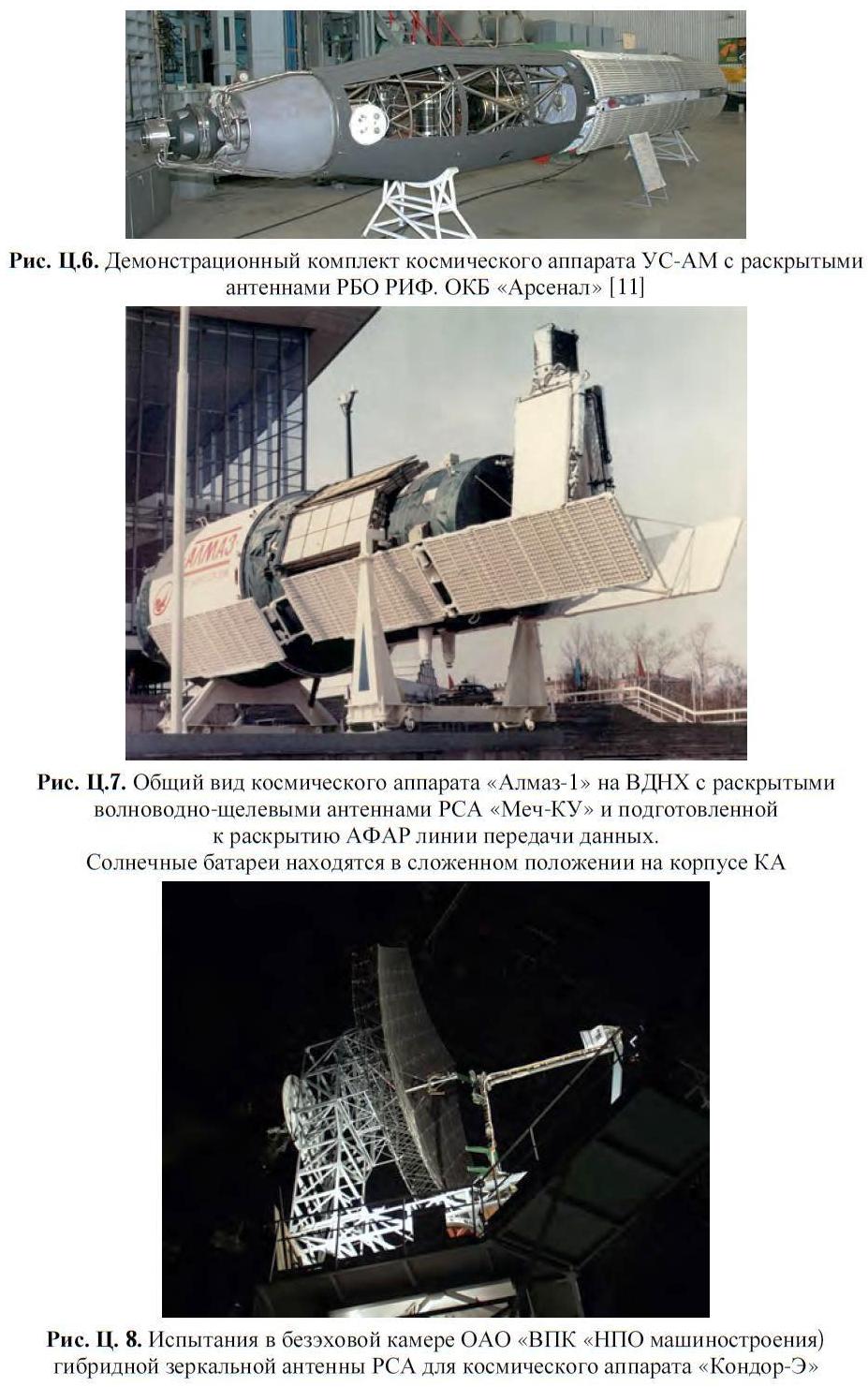
Ракета-носитель 'Стрела' вывела на орбиту спутник ДЗЗ 'Кондор-Э'
Сегодня с космодрома Байконур, с площадки 175/59 в 20:53 по мск стартовала конверсионная ракета-носитель 'Стрела' со спутником дистанционного зондирования земли 'Кондор-Э'. Отделение КА от носителя произошло в 21:18:35 мск. Спутник... // www.sdelanounas.ru13.5.11. РСА малого космического аппарата «Кондор-Э»
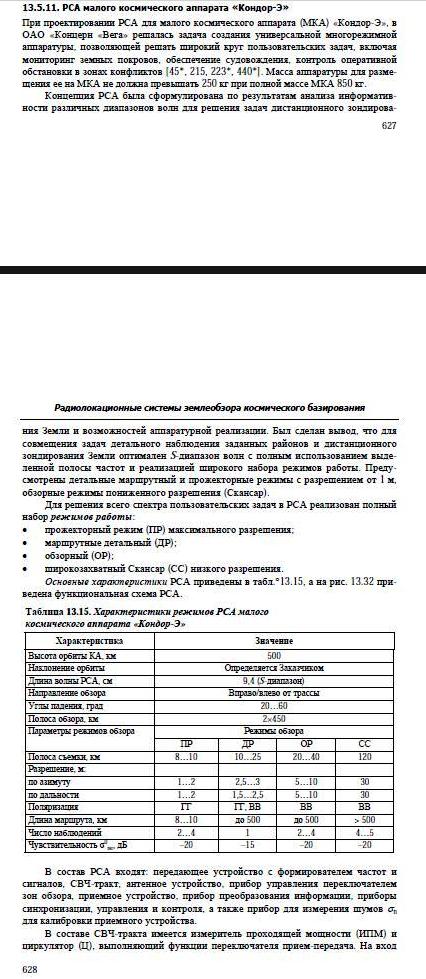
При проектировании РСА для малого космического аппарата (МКА) «Кондор-Э», в ОАО «Концерн «Вега» решалась задача создания универсальной многорежимной аппаратуры, позволяющей решать широкий круг пользовательских задач, включая мониторинг земных покровов, обеспечение судовождения, контроль оперативной обстановки в зонах конфликтов [45*, 215, 223*. 440*]. Масса аппаратуры для размещения ее на МКА не должна превышать 250 кг при полной массе МКА 850 кг.
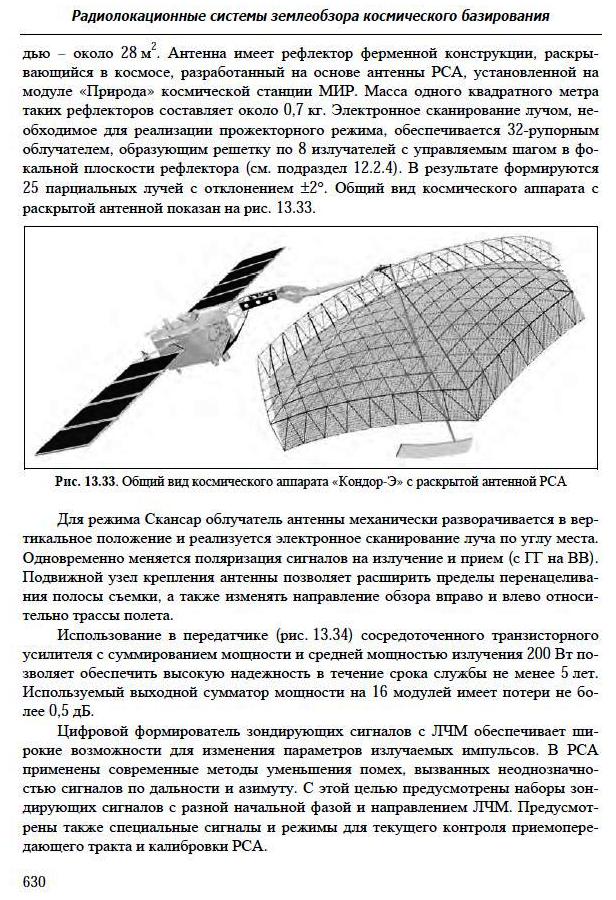
Концепция РСА была сформулирована по результатам анализа информативности различных диапазонов волн для решения задач дистанционного зондирования Земли и возможностей аппаратурной реализации. Был сделан вывод, что для совмещения задач детального наблюдения заданных районов и дистанционного зондирования Земли оптимален S-диапазон волн с полным использованием выделенной полосы частот и реализацией широкого набора режимов работы. Предусмотрены детальные маршрутный и прожекторные режимы с разрешением от 1 м, обзорные режимы пониженного разрешения (Скансар).
Для решения всего спектра пользовательских задач в РСА реализован полный набор режимов работы:
• прожекторный режим (ПР) максимального разрешения;
• маршрутные детальный (ДР);
• обзорный (ОР);
• широкозахватный Скансар (СС) низкого разрешения.
Это сообщение редактировалось 15.08.2013 в 16:01
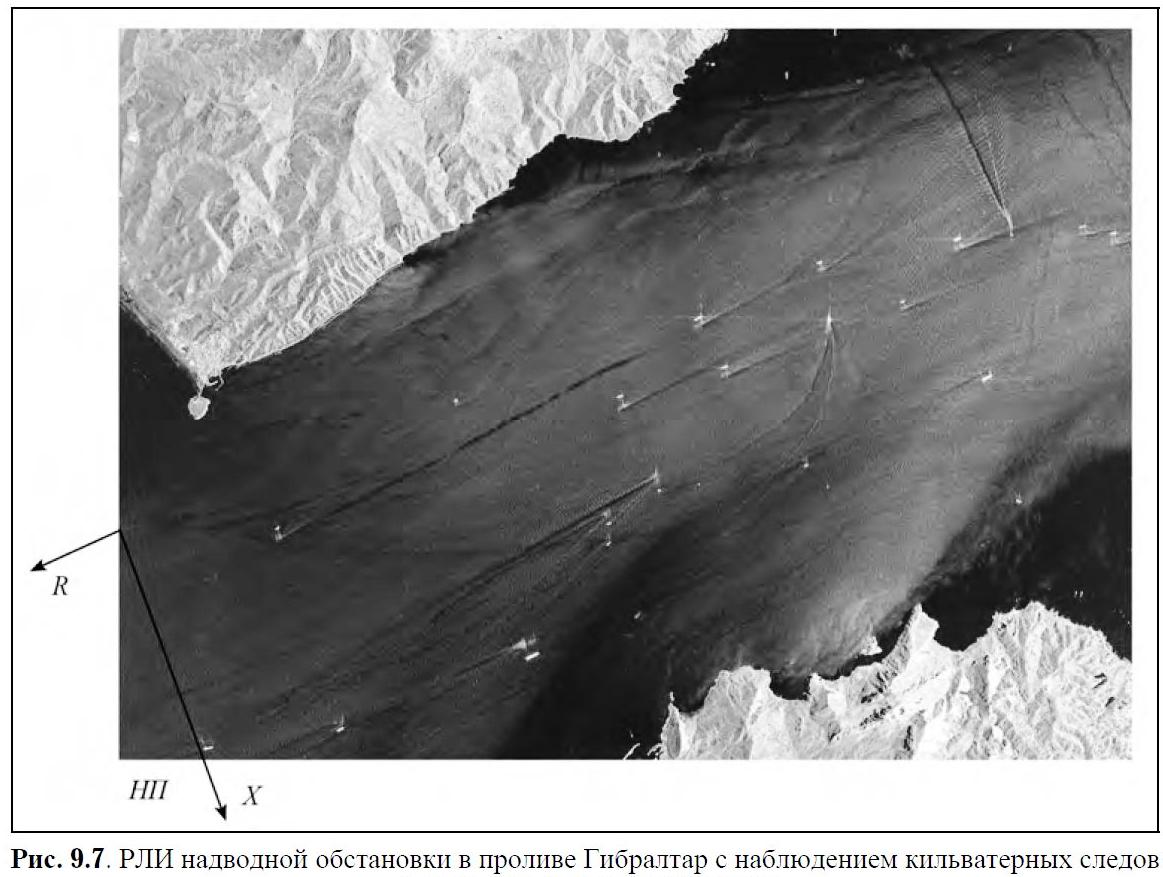
Гибралтар, разрешение 3м:
Лучшую точность измерения азимутальной координаты движущихся морских целей обеспечивает использование информации о возмущениях на морской поверхности. На рис. 9.7 показано РЛИ пролива Гибралтар, полученное с помощью РСА Terra SAR-X с разрешающей способностью 3 м [530, 536]. Пo кильватерным следам, образованным движущимися судами, определяют их курс (по направлению следа), азимутальную координату (по месту начала следа), величину радиальной составляющей скорости (по величине азимутального смещения отметки) и, наконец, по формулам (9.4), (9.6) - значения скорости судна. Измерить абсолютную скорость судна можно также по углу, образованному кильватерными следами
Прикреплённые файлы:
Это сообщение редактировалось 15.08.2013 в 15:55
9.3. Контроль надводной обстановки
9.3.1. Общие требования к решению задачи контроля надводной обстановки
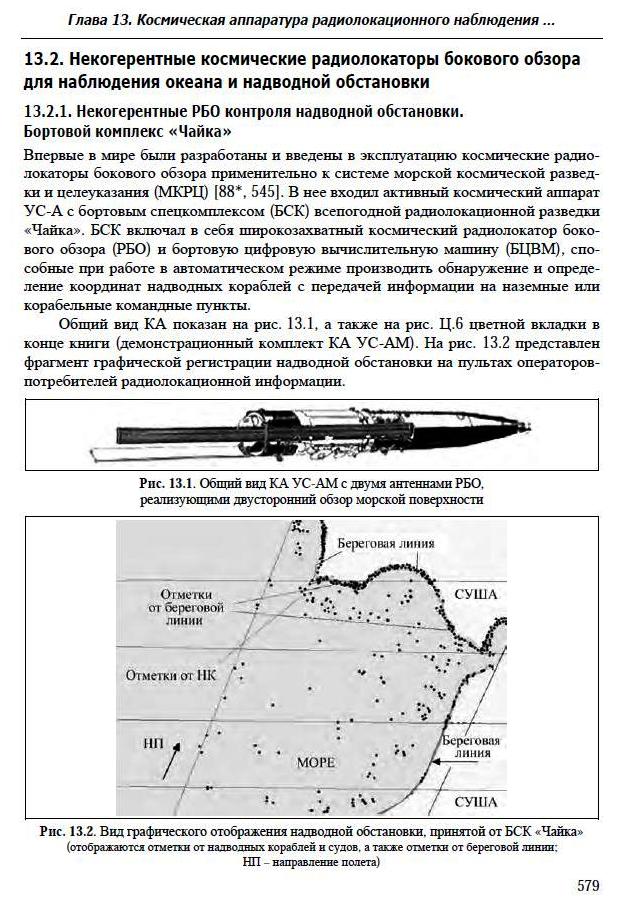
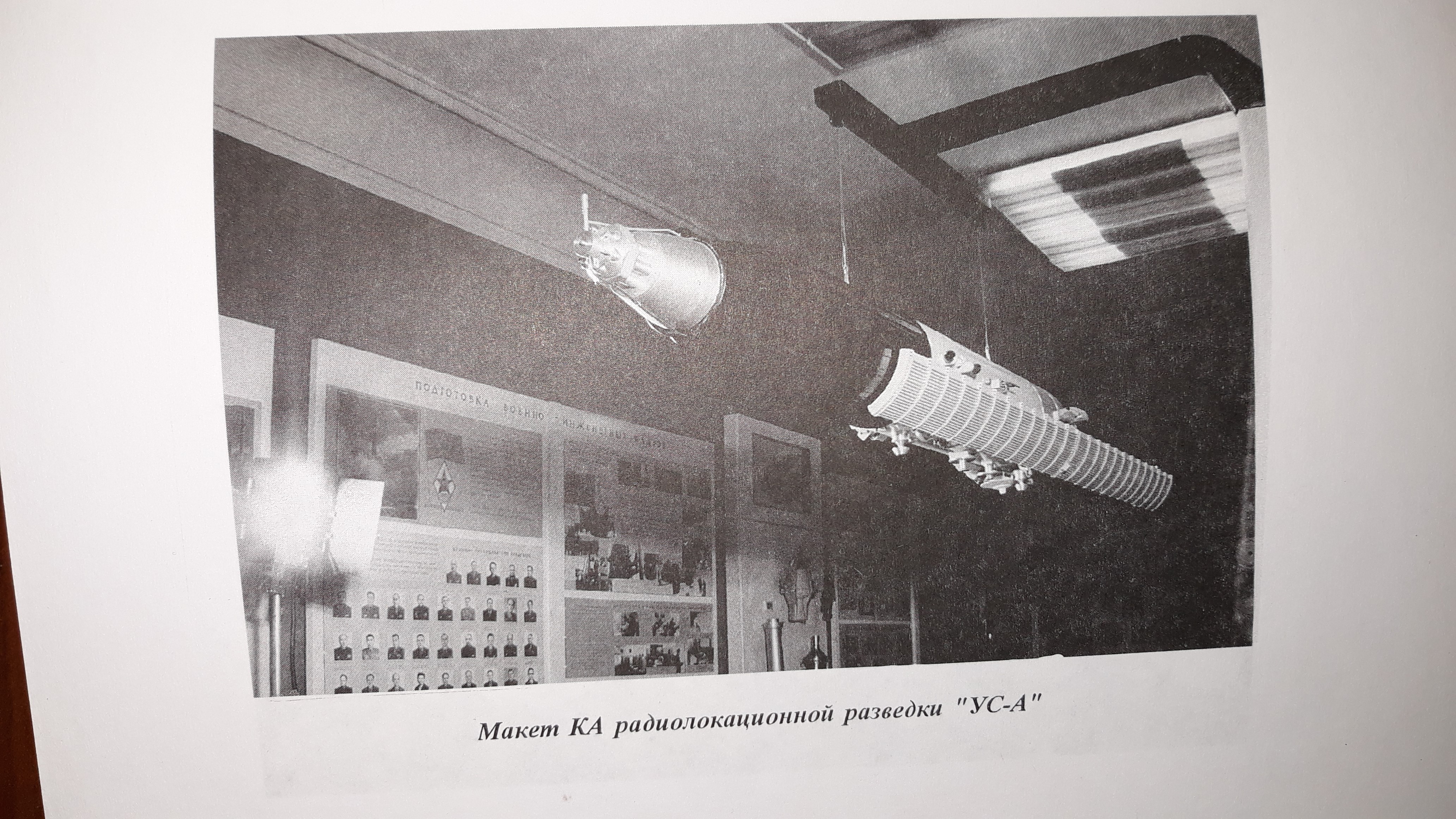
Для решения задач контроля надводной обстановки в течение многих лет использовались радиолокаторы бокового обзора (РБО) системы морской космической разведки и целеуказания (МКРЦ) в составе космических аппаратов УС-А, УС-АМ. Бортовые радиолокационные комплексы «Чайка» обеспечивали автоматическое обнаружение кораблей и селекцию сигналов от суши (см. гл. 13 и публикации [88. 545]). Контроль состояния морской поверхности и ледовая разведка осуществлялось с помощью космических РБО типа «Космос-1500», «Ресурс-О» [197]. Низкое пространственное разрешение, которое может быть обеспечено космическими РБО (1,5...2 км), ограничивает возможности обнаружения малых судов и идентификацию ледового покрова.
В современных условиях общая задача обнаружения судов (ship detection) включает в себя:
1) обнаружение и определение координат кораблей (в акваториях и базах) и судов разных классов. Особой задачей является контроль зон рыболовства с выявлением нарушителей, а также обнаружение контрабандистов на судах малого тоннажа;
2) определение класса (типа) морской цели;
3) определение курса и скорости.
В [554] сформулированы требования к перспективной системе контроля надводной обстановки ЕКА. разрабатываемой по программе Senlinel—1: поляриметрический (ГГ+ГВ) РСА с полосой съемки от 100...200 до 300...600 км и обнаружением судов с размерами от 3 м (поисково-спасательные операции), 15...35 м (рыболовы), 8.. .50 м (контрабандисты, торговцы оружием, террористы).
Прикреплённые файлы:
Это сообщение редактировалось 15.08.2013 в 16:11
- dmirg78 [14.01.2015 07:38]: Перенос сообщений в ГЛОНАСС!
- dmirg78 [14.01.2015 13:28]: Перенос сообщений в Что-то упало.

Перспективный спутник ДЗЗ "Обзор-Р" покажут на МАКС
Согласно техническим характеристикам, срок активного существования космического аппарата "Обзор-Р" составит 5 лет. Запуск его предполагается на ракете-носителе "Союз-2.1а". // ria.ruВысокодетальный кадровый режим обеспечит съемку участка 10 на 15-20 километров с пространственным разрешением не хуже 1 метра и радиометрическим разрешением не хуже 3 дБ. В зависимости от задач возможны различные варианты маршрутной съемки. Протяженность маршрута — до 4 тысяч километров, ширина полосы обзора может варьироваться от 470 до 750 километров с любой стороны от трассы полета. "Обзор-Р" будет работать на терминаторной солнечно-синхронной орбите, которая позволит покрыть поверхность Земли в диапазоне широт от 35° с.ш. до 60° с.ш. полосой обзора за 2 суток.
РИА Новости http://ria.ru/defense_safety/20150818/1192526649.html#ixzz3j9aFAbHa
Согласно техническим характеристикам, срок активного существования космического аппарата "Обзор-Р" составит 5 лет. Запуск его предполагается на ракете-носителе "Союз-2.1а".
РИА Новости http://ria.ru/defense_safety/20150818/1192526649.html#ixzz3j9agVMoI
https://lenta.ru/news/2016/07/20/arctic/
По утверждению собеседника газеты, в проект системы включены три контура: морской, космический и наземный. Морской представлен компактными автономными гидроакустическими буями и подводными датчиками, отслеживающими акустическую обстановку и передающими полученные данные на спутники космического контура. Наземный контур включает систему управления, которая анализирует поступившую информацию и выдает ее конечному пользователю.
- Полл [20.02.2018 09:42]: Перенос сообщений из О Ту-160
- Полл [20.02.2018 09:44]: Перенос сообщений из О Ту-160
- Полл [20.02.2018 12:18]: Перенос в новую тему Спутниковое ДРЛО
- Полл [20.02.2018 12:19]: Перенос сообщений в Спутниковое ДРЛО

Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.


R.m.> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
Прикреплённые файлы:

R.m.>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
да конечно, крайне интересно.
да конечно, крайне интересно.
R.m.>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
E.r.> да конечно, крайне интересно.
E.r.> да конечно, крайне интересно.
Прикреплённые файлы:
R.m.>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
E.r.>> да конечно, крайне интересно.
E.r.>> да конечно, крайне интересно.
Прикреплённые файлы:
R.m.>>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
R.m.> E.r.>> да конечно, крайне интересно.
R.m.> E.r.>> да конечно, крайне интересно.
Прикреплённые файлы:
R.m.>>>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
R.m.>> E.r.>> да конечно, крайне интересно.
R.m.>> E.r.>> да конечно, крайне интересно.
Прикреплённые файлы:
R.m.>>>>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
R.m.> R.m.>> E.r.>> да конечно, крайне интересно.
R.m.> R.m.>> E.r.>> да конечно, крайне интересно.
Прикреплённые файлы:
R.m.>>>>>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
R.m.>> R.m.>> E.r.>> да конечно, крайне интересно.
R.m.>> R.m.>> E.r.>> да конечно, крайне интересно.
Прикреплённые файлы:
R.m.>>>>>>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
R.m.> R.m.>> R.m.>> E.r.>> да конечно, крайне интересно.
R.m.> R.m.>> R.m.>> E.r.>> да конечно, крайне интересно.
Прикреплённые файлы:
R.m.>>>>>>>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
R.m.>> R.m.>> R.m.>> E.r.>> да конечно, крайне интересно.
R.m.>> R.m.>> R.m.>> E.r.>> да конечно, крайне интересно.
Прикреплённые файлы:
R.m.>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
ее в сеть уже выкладывали:-)
ее в сеть уже выкладывали:-)
R.m.>>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
E.r.> ее в сеть уже выкладывали:-)
E.r.> ее в сеть уже выкладывали:-)
Прикреплённые файлы:
R.m.>>>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
E.r.>> ее в сеть уже выкладывали:-)
E.r.>> ее в сеть уже выкладывали:-)
Прикреплённые файлы:
Реклама Google — средство выживания форумов :)
R.m.>>>>>>> Есть одна книжечка по этой теме, как говорится дела давно минувших дней... Постараюсь кое-что выложить если интересно.
R.m.> E.r.>> ее в сеть уже выкладывали:-)
R.m.> E.r.>> ее в сеть уже выкладывали:-)
Прикреплённые файлы:

Copyright © Balancer 1997..2025
Создано 15.08.2013
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 15.08.2013
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
