 SashaMaks
SashaMaks

 инфо
инфо инструменты
инструменты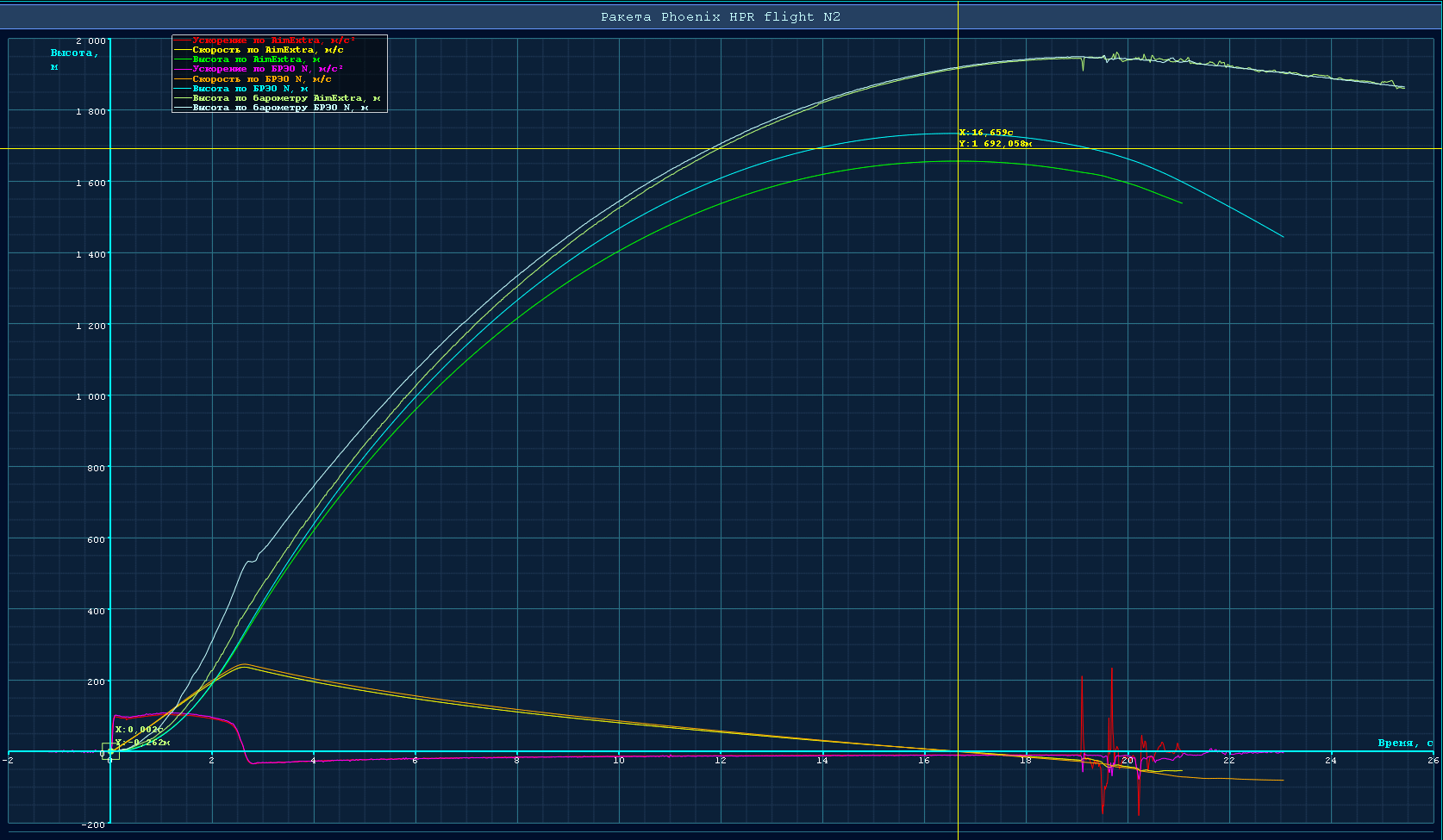
 6136
6136
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/3d/3dnews/assets/external/illustrations/2010/10/13/600098/128x128-crop/mems-accelerometer-2-big.jpg)
Использование микроэлектромеханических (MEMS) акселерометров в ракетомоделях
Теги:
Б.г.>> >Слив засчитан.
SashaMaks> Я всё же подожду вот эту статью:
Уже передумал.
Б.г.> величины этих ошибок имеют разные знаки и разные показатели степени корректирующих полиномов. В первом экземпляре я, подумав и взвесив, ограничился первой степенью. Во втором использовать пришлось кубический полином.
Разве это не математика?
А разделов тут много, но всё относится к общему - построение калибровочной функции. Ничего нового.
SashaMaks> Я всё же подожду вот эту статью:
Уже передумал.
Б.г.> величины этих ошибок имеют разные знаки и разные показатели степени корректирующих полиномов. В первом экземпляре я, подумав и взвесив, ограничился первой степенью. Во втором использовать пришлось кубический полином.
Разве это не математика?
А разделов тут много, но всё относится к общему - построение калибровочной функции. Ничего нового.



Б.г.>> величины этих ошибок имеют разные знаки и разные показатели степени корректирующих полиномов. В первом экземпляре я, подумав и взвесив, ограничился первой степенью. Во втором использовать пришлось кубический полином.
SashaMaks> Разве это не математика?
Ровно в той же степени, что и правило рычага.
SashaMaks> А разделов тут много, но всё относится к общему - построение калибровочной функции. Ничего нового.
Ага. ты ещё скажи - аффинные преобразования. Тоже можно подвести.
SashaMaks> Разве это не математика?
Ровно в той же степени, что и правило рычага.
SashaMaks> А разделов тут много, но всё относится к общему - построение калибровочной функции. Ничего нового.
Ага. ты ещё скажи - аффинные преобразования. Тоже можно подвести.

SashaMaks>> Разве это не математика?
Б.г.> Ровно в той же степени, что и правило рычага.
Не понял. Так полиномиальные преобразования - это математика или нет?
Б.г.> Ага. ты ещё скажи - аффинные преобразования. Тоже можно подвести.
Аффинные преобразования являются подмножеством полиномиальных преобразований?
Б.г.> Ровно в той же степени, что и правило рычага.
Не понял. Так полиномиальные преобразования - это математика или нет?
Б.г.> Ага. ты ещё скажи - аффинные преобразования. Тоже можно подвести.
Аффинные преобразования являются подмножеством полиномиальных преобразований?
SashaMaks>>> Разве это не математика?
Б.г.>> Ровно в той же степени, что и правило рычага.
SashaMaks> Не понял. Так полиномиальные преобразования - это математика или нет?
Правило рычага описывается пропорцией, это математика или нет?
Б.г.>> Ага. ты ещё скажи - аффинные преобразования. Тоже можно подвести.
SashaMaks> Аффинные преобразования являются подмножеством полиномиальных преобразований?
Наоборот, надмножеством.
Б.г.>> Ровно в той же степени, что и правило рычага.
SashaMaks> Не понял. Так полиномиальные преобразования - это математика или нет?
Правило рычага описывается пропорцией, это математика или нет?
Б.г.>> Ага. ты ещё скажи - аффинные преобразования. Тоже можно подвести.
SashaMaks> Аффинные преобразования являются подмножеством полиномиальных преобразований?
Наоборот, надмножеством.


SashaMaks>> Аффинные преобразования являются подмножеством полиномиальных преобразований?
Б.г.> Наоборот, надмножеством.
Нет, именно подмножеством. Аффинные преобразования - это полиномиальное преобразование 1 степени.
Б.г.> Наоборот, надмножеством.
Нет, именно подмножеством. Аффинные преобразования - это полиномиальное преобразование 1 степени.

Б.г.> Правило рычага описывается пропорцией, это математика или нет?
Пропорция - это математика:

SashaMaks>> Аффинные преобразования являются подмножеством полиномиальных преобразований?
Б.г.> Наоборот, надмножеством.
У тебя какая-то своя математика...
Пропорция - это математика:
Пропорция (математика) — Википедия
Пропо́рция (лат. proportio — соразмерность, выравненность частей; определённое соотношение частей между собой), равенство отношений двух [и более] пар чисел и , т. е. равенство вида , или, в других обозначениях, равенство (часто читается как: « относится к так же, как относится к »). В этом случае и называют крайними, и — средними членами пропорции. Такую пропорцию ещё называют геометрической, чтобы не путать с арифметической и гармонической пропорциями. В IV веке до н. э. древнегреческий математик Евдокс обобщил понятие пропорции на случай несоизмеримых величин (например, стороны и диагонали квадрата). // Дальше — ru.wikipedia.orgSashaMaks>> Аффинные преобразования являются подмножеством полиномиальных преобразований?
Б.г.> Наоборот, надмножеством.
У тебя какая-то своя математика...
- Xan [30.11.2016 16:25]: Перенос сообщений в Использование твердотельных гироскопов в ракетомоделях
SashaMaks>> Пример 2:
SashaMaks> Пример 3:
Пример №4:
Подзабылся ещё один старт, где были все необходимые данные для проверки работоспособности успешной работы алгоритма одноосевого датчика апогея.
Применительно к пуску вот этой ракеты:
(Запуски ракет и испытания [Skyangel#28.06.15 17:25])
(Запуски ракет и испытания [pinko#28.06.15 18:24])
Есть полный комплект данных с двух измерительных устройств:
(Электронное оборудование ракет - БРЭО,часть XIV [pinko#03.07.15 23:44])
(http://www.blog.exrockets.com/blog/wp-content/.../2014/12/Data.xlsx)
Причём, алгоритм отработал намного точнее и успешнее, чем алгоритмы по барометрическим датчикам, так как у них на всём протяжении полёта возникла сильная ошибка из-за переразряжения давления внутри корпуса ракеты вследствие возникновения значительного эжектирующего эффекта.
Ракета проходила апогей по наклонной траектории и её высота никак не могла быть больше, чем показывают данные с акселерометров, только меньше. Действительный апогей находится примерно в интервале от 1500м до 1700м, а не 1953м.
SashaMaks> Пример 3:
Пример №4:
Подзабылся ещё один старт, где были все необходимые данные для проверки работоспособности успешной работы алгоритма одноосевого датчика апогея.
Применительно к пуску вот этой ракеты:
(Запуски ракет и испытания [Skyangel#28.06.15 17:25])
(Запуски ракет и испытания [pinko#28.06.15 18:24])
Есть полный комплект данных с двух измерительных устройств:
(Электронное оборудование ракет - БРЭО,часть XIV [pinko#03.07.15 23:44])
(http://www.blog.exrockets.com/blog/wp-content/.../2014/12/Data.xlsx)
Причём, алгоритм отработал намного точнее и успешнее, чем алгоритмы по барометрическим датчикам, так как у них на всём протяжении полёта возникла сильная ошибка из-за переразряжения давления внутри корпуса ракеты вследствие возникновения значительного эжектирующего эффекта.
Ракета проходила апогей по наклонной траектории и её высота никак не могла быть больше, чем показывают данные с акселерометров, только меньше. Действительный апогей находится примерно в интервале от 1500м до 1700м, а не 1953м.
Прикреплённые файлы:

6136
новичок
чувствительность MEMS-акселерометра к силе тяжести убирается ВЧ-фильтром,
его можно организовать программно в управляющем микроконтроллере,
еще варианты - использовать цифровой акселерометр со встроенным ВЧ-фильтром, например, прецизионный акселерометр, представленный здесь: прецизионный акселерометр
ВЧ-фильтр есть также в акселерометре BMA280
или
использовать аналоговый ВЧ-фильтр (CR-цепочка) с аналоговым акселерометром.
Подбирать параметры ВЧ-фильтра в зависимости от ожидаемых зависимостей ускорений от времени во время полета. Очевидно, нештатные ситуации (резкие развороты, например) менее требовательны к параметрам ВЧ-фильтра.
использование 3-осевого акселерометра даст возможность работать с модулем ускорения, смысл и вычисление которого представлены здесь: Программное обеспечение
если используется механический гироскоп, на гиростабилизированную платформу можно поместить 1-осевой акселерометр, при необходимости можно питать его от батареи, установленной на той же платформе, а при наступлении события, например, включать светодиод, т.е., акселерометр с передатчиком и питанием могут быть полностью смонтированы на гироплатформе
возможно, какое-то из решений будет вам полезно (или их комбинация)
его можно организовать программно в управляющем микроконтроллере,
еще варианты - использовать цифровой акселерометр со встроенным ВЧ-фильтром, например, прецизионный акселерометр, представленный здесь: прецизионный акселерометр
ВЧ-фильтр есть также в акселерометре BMA280
или
использовать аналоговый ВЧ-фильтр (CR-цепочка) с аналоговым акселерометром.
Подбирать параметры ВЧ-фильтра в зависимости от ожидаемых зависимостей ускорений от времени во время полета. Очевидно, нештатные ситуации (резкие развороты, например) менее требовательны к параметрам ВЧ-фильтра.
использование 3-осевого акселерометра даст возможность работать с модулем ускорения, смысл и вычисление которого представлены здесь: Программное обеспечение
если используется механический гироскоп, на гиростабилизированную платформу можно поместить 1-осевой акселерометр, при необходимости можно питать его от батареи, установленной на той же платформе, а при наступлении события, например, включать светодиод, т.е., акселерометр с передатчиком и питанием могут быть полностью смонтированы на гироплатформе
возможно, какое-то из решений будет вам полезно (или их комбинация)
Это сообщение редактировалось 13.09.2017 в 12:29
6136> чувствительность MEMS-акселерометра к силе тяжести убирается ВЧ-фильтром,
А зачем нам её убирать?
Наоборот, силу тяжести нужно учитывать. Наибольшая ошибка идёт именно от того, что её тут не учитывают никак, и получается, что ракеты по данным с борта летят уже на старте ещё до подачи команды ПУСК.
А зачем нам её убирать?
Наоборот, силу тяжести нужно учитывать. Наибольшая ошибка идёт именно от того, что её тут не учитывают никак, и получается, что ракеты по данным с борта летят уже на старте ещё до подачи команды ПУСК.

Приветствую ракетостроителей активно воплощающих идею управления ракетой в полете!
Я вот пока далек от мысли управления вертикалью.
Но мне вдруг подумалось использовать вместо гироскопа акселерометр для отмены включения тяги второй ступени, если ракета начала отклоняться от вертикали.
(Все равно высоко уже не полетит, а искать далеко придется.)
Если я с оси Z снимаю данные ускорения для управления разделением ступеней и включением «второго» двигателя, то при отклонении от вертикали и т.к. ракета начинает вращаться, данные с осей X и Y должны выписывать синусоиду. Если амплитуда синусоиды с любой горизонтальной оси уходит за пределы заданного диапазона, то двигатель второй ступени НЕ включаем. (!)
*Это я так рассуждаю применительно к аналоговым акселерометрам, и у меня не задействованы горизонтальные оси.
Или я что-то упускаю из виду?
И достаточно-ли точно нужно расположить акселерометр в ракете, чтобы его ось Z совпала с осью вращения самой ракеты?
Думаю, Форум и уважаемый Б.г. сумеют дать квалифицированный ответ.
Я вот пока далек от мысли управления вертикалью.
Но мне вдруг подумалось использовать вместо гироскопа акселерометр для отмены включения тяги второй ступени, если ракета начала отклоняться от вертикали.
(Все равно высоко уже не полетит, а искать далеко придется.)
Если я с оси Z снимаю данные ускорения для управления разделением ступеней и включением «второго» двигателя, то при отклонении от вертикали и т.к. ракета начинает вращаться, данные с осей X и Y должны выписывать синусоиду. Если амплитуда синусоиды с любой горизонтальной оси уходит за пределы заданного диапазона, то двигатель второй ступени НЕ включаем. (!)
*Это я так рассуждаю применительно к аналоговым акселерометрам, и у меня не задействованы горизонтальные оси.
Или я что-то упускаю из виду?
И достаточно-ли точно нужно расположить акселерометр в ракете, чтобы его ось Z совпала с осью вращения самой ракеты?
Думаю, Форум и уважаемый Б.г. сумеют дать квалифицированный ответ.

Это сообщение редактировалось 07.10.2017 в 17:14
mihail66> Если я с оси Z снимаю данные ускорения для управления разделением ступеней и включением «второго» двигателя, то при отклонении от вертикали и т.к. ракета начинает вращаться, данные с осей X и Y должны выписывать синусоиду. Если амплитуда синусоиды с любой горизонтальной оси уходит за пределы заданного диапазона, то двигатель второй ступени НЕ включаем. (!)
mihail66> Или я что-то упускаю из виду?
Акселерометром наклон ракеты определить невозможно") Акселерометром можно определить полный импульс, отработанный движком. Иногда даже из его данных удаётся вычленить долю лобового сопротивления. Но не наклон ракеты.
Акселерометром можно определить полный импульс, отработанный движком. Иногда даже из его данных удаётся вычленить долю лобового сопротивления. Но не наклон ракеты.
Если акселерометры стоят в "голове", т.е., далеко от центра тяжести, то, да, возникает проекция угловой скорости на боковые оси. Но аэродинамические компоненты боковых ускорений куда больше, чем те, что создаются наклонами ракеты. Проблема ещё и в том, что, без гироскопов, в полёте не вычленить, где аэродинамика, а где - наклоны ракеты.
mihail66> И достаточно-ли точно нужно расположить акселерометр в ракете, чтобы его ось Z совпала с осью вращения самой ракеты?
Для ракетомодельных целей градус-другой роли не играют. Если известно, что перекос есть, его желательно иметь в виду, поскольку боковые ускорения из-за несовершенства геометрии и аэродинамических сил весьма велики (у меня доходило до половины продольного ускорения).
Потом, при обработке записей после полёта, обычно удаётся установить, чему именно был равен перекос Когда ракета стоит на старте, то видны проекции "же" на боковые оси, т.к. направляющая обычно не идеально отвесная. Когда срабатывает движок, то обычно видны проекции тяги на боковые оси из-за перекосов акселерометра относительно ракеты. Всё это более или менее надёжно вычленяется при пост-обработке, но, вычислять это в полёте - нужно иметь хороший алгоритм и мощный вычислитель, скажем, кортекс-М4 на частоте 72 МГц и выше.
mihail66> Или я что-то упускаю из виду?
Акселерометром наклон ракеты определить невозможно
") Акселерометром можно определить полный импульс, отработанный движком. Иногда даже из его данных удаётся вычленить долю лобового сопротивления. Но не наклон ракеты.
Акселерометром можно определить полный импульс, отработанный движком. Иногда даже из его данных удаётся вычленить долю лобового сопротивления. Но не наклон ракеты.Если акселерометры стоят в "голове", т.е., далеко от центра тяжести, то, да, возникает проекция угловой скорости на боковые оси. Но аэродинамические компоненты боковых ускорений куда больше, чем те, что создаются наклонами ракеты. Проблема ещё и в том, что, без гироскопов, в полёте не вычленить, где аэродинамика, а где - наклоны ракеты.
mihail66> И достаточно-ли точно нужно расположить акселерометр в ракете, чтобы его ось Z совпала с осью вращения самой ракеты?
Для ракетомодельных целей градус-другой роли не играют. Если известно, что перекос есть, его желательно иметь в виду, поскольку боковые ускорения из-за несовершенства геометрии и аэродинамических сил весьма велики (у меня доходило до половины продольного ускорения).
Потом, при обработке записей после полёта, обычно удаётся установить, чему именно был равен перекос
Когда ракета стоит на старте, то видны проекции "же" на боковые оси, т.к. направляющая обычно не идеально отвесная. Когда срабатывает движок, то обычно видны проекции тяги на боковые оси из-за перекосов акселерометра относительно ракеты. Всё это более или менее надёжно вычленяется при пост-обработке, но, вычислять это в полёте - нужно иметь хороший алгоритм и мощный вычислитель, скажем, кортекс-М4 на частоте 72 МГц и выше.
Б.г.> Акселерометром наклон ракеты определить невозможно ...
Т.е. из выше прочитанного я делаю вывод, что при вращении ракеты с наклоном от вертикали, данные о гравитации с осей X и Y потеряются в аэродинамических показателях?
*Я не использую аппаратные вычисления, акселерометр аналоговый и обработка данных аналоговая.
Форум, подскажи доступный аналоговый гироскоп.
Т.е. из выше прочитанного я делаю вывод, что при вращении ракеты с наклоном от вертикали, данные о гравитации с осей X и Y потеряются в аэродинамических показателях?
*Я не использую аппаратные вычисления, акселерометр аналоговый и обработка данных аналоговая.
Форум, подскажи доступный аналоговый гироскоп.
Это сообщение редактировалось 07.10.2017 в 18:57
Б.г.>> Акселерометром наклон ракеты определить невозможно ...
mihail66> Т.е. из выше прочитанного я делаю вывод, что при вращении ракеты с наклоном от вертикали, данные о гравитации с осей X и Y потеряются в аэродинамических показателях?
Данных о гравитации в показаниях осей X и Y нет изначально. И, если бы акселерометр находился в центре тяжести ракеты, неоткуда было бы появиться. Но, из-за того, что расстояние от ЦТ до акселерометра - сильно не ноль, угловые ускорения по боковым осям дают сигнал на акселерометры боковых ускорений. А угловая скорость даёт помеху на акселерометр продольного ускорения.
Допустим, угловое ускорение - один радиан (это 57 градусов) в секунду за секунду, тогда, при расстоянии от центра тяжести ракеты до акселерометра 1 метр (это длина ракеты больше полутора) к акселерометру будет приложено ускорение 1 м/с2 (примерно 0,1g). Это вполне можно зарегистрировать, если бы не мешающие аэродинамические моменты. Поставив 2 акселерометра, один в голове, другой в хвосте, можно, наверно, отделить аэродинамику от поворотов с какой-то точностью. Но даже тогда от сигнала акселерометра до величины поворота - двойной интеграл! Потому что боковой акселерометр реагирует на угловое УСКОРЕНИЕ.
mihail66> *Я не использую аппаратные вычисления, акселерометр аналоговый и обработка данных аналоговая.
mihail66> Форум, подскажи доступный аналоговый гироскоп.
И доступный аналоговый интегратор!
Доступный аналоговый гироскоп - это не так сложно, как кажется. Например, можно использовать Murata ENC-03 или EPSON XV-3700. Эти гироскопы попадаются в видеокамерах и пультах дистанционного управления медиаплееров. Можно ли их купить отдельно - я не знаю, мюратовских у меня целый мешок, могу поделиться.
Но интегрирование в аналоговом исполнении убьёт идею на корню потому что интегратор склонен насыщаться. А схемотехника, которая не будет ему давать это делать, не очень тривиальна.
mihail66> Т.е. из выше прочитанного я делаю вывод, что при вращении ракеты с наклоном от вертикали, данные о гравитации с осей X и Y потеряются в аэродинамических показателях?
Данных о гравитации в показаниях осей X и Y нет изначально. И, если бы акселерометр находился в центре тяжести ракеты, неоткуда было бы появиться. Но, из-за того, что расстояние от ЦТ до акселерометра - сильно не ноль, угловые ускорения по боковым осям дают сигнал на акселерометры боковых ускорений. А угловая скорость даёт помеху на акселерометр продольного ускорения.
Допустим, угловое ускорение - один радиан (это 57 градусов) в секунду за секунду, тогда, при расстоянии от центра тяжести ракеты до акселерометра 1 метр (это длина ракеты больше полутора) к акселерометру будет приложено ускорение 1 м/с2 (примерно 0,1g). Это вполне можно зарегистрировать, если бы не мешающие аэродинамические моменты. Поставив 2 акселерометра, один в голове, другой в хвосте, можно, наверно, отделить аэродинамику от поворотов с какой-то точностью. Но даже тогда от сигнала акселерометра до величины поворота - двойной интеграл! Потому что боковой акселерометр реагирует на угловое УСКОРЕНИЕ.
mihail66> *Я не использую аппаратные вычисления, акселерометр аналоговый и обработка данных аналоговая.
mihail66> Форум, подскажи доступный аналоговый гироскоп.
И доступный аналоговый интегратор!
Доступный аналоговый гироскоп - это не так сложно, как кажется. Например, можно использовать Murata ENC-03 или EPSON XV-3700. Эти гироскопы попадаются в видеокамерах и пультах дистанционного управления медиаплееров. Можно ли их купить отдельно - я не знаю, мюратовских у меня целый мешок, могу поделиться.
Но интегрирование в аналоговом исполнении убьёт идею на корню
потому что интегратор склонен насыщаться. А схемотехника, которая не будет ему давать это делать, не очень тривиальна.
Б.г.> Данных о гравитации в показаниях осей X и Y нет изначально. (!)
Б.г.> И доступный аналоговый интегратор!
А в чем проблема "слепить" простой аналоговый RC-интегратор?!!.
Б.г.> Но интегрирование в аналоговом исполнении убьёт идею на корню ..
... очень тривиальна..
Вынужден с тобой согласиться (я просто представил сигнал).
Спасибо Б.г.!
Б.г.> И доступный аналоговый интегратор!
А в чем проблема "слепить" простой аналоговый RC-интегратор?!!.
Б.г.> Но интегрирование в аналоговом исполнении убьёт идею на корню ..
... очень тривиальна..
Вынужден с тобой согласиться (я просто представил сигнал).
Спасибо Б.г.!
Б.г.>> Данных о гравитации в показаниях осей X и Y нет изначально. (!)
Б.г.>> И доступный аналоговый интегратор!
mihail66> А в чем проблема "слепить" простой аналоговый RC-интегратор?!!.
"интегрирующая цепочка" - это не то же самое, что "интегратор". Если у интегратора на входе постоянный сдвиг уровня, то на выходе напряжение должно непрерывно расти. Если мы строим интегратор на операционном усилителе, то расти оно может максимум до напряжения питания усилителя. Это и называется "насыщение".
Б.г.>> Но интегрирование в аналоговом исполнении убьёт идею на корню ..
mihail66> ... очень тривиальна..
mihail66> Вынужден с тобой согласиться (я просто представил сигнал).
И что же ты напредставлял?
Б.г.>> И доступный аналоговый интегратор!
mihail66> А в чем проблема "слепить" простой аналоговый RC-интегратор?!!.
"интегрирующая цепочка" - это не то же самое, что "интегратор". Если у интегратора на входе постоянный сдвиг уровня, то на выходе напряжение должно непрерывно расти. Если мы строим интегратор на операционном усилителе, то расти оно может максимум до напряжения питания усилителя. Это и называется "насыщение".
Б.г.>> Но интегрирование в аналоговом исполнении убьёт идею на корню ..
mihail66> ... очень тривиальна..
mihail66> Вынужден с тобой согласиться (я просто представил сигнал).
И что же ты напредставлял?
mihail66> А в чем проблема "слепить" простой аналоговый RC-интегратор?!!.
mihail66> Вынужден с тобой согласиться (я просто представил сигнал).
Так я могу просто измерить амплитуду на оси относительно постоянной?!
Или я возможно загнался?!
Пока не воспринимай мою "бредятину", хочу сам разобраться детально.
mihail66> Вынужден с тобой согласиться (я просто представил сигнал).
Так я могу просто измерить амплитуду на оси относительно постоянной?!
Или я возможно загнался?!
Пока не воспринимай мою "бредятину", хочу сам разобраться детально.
mihail66> Пока не воспринимай мою "бредятину", хочу сам разобраться детально.
Послушай, Б.г.!
Я помню твой шикарный "ликбез" про поведение акселерометра в ракете.
И про то, что акселерометр перестанет чувствовать земное G когда ракета сорвется с места, потому что у него не будет опоры.
И все-же утверждается, что при наклонной траектории в показания акселерометра будет вмешиваться земное G.
Но я говорю об инерционном полете ракеты, где боковые оси должны чувствовать землю, и можно выделить проекции притяжения из ускорения торможения.
(Или я окончательно "затупил")
Послушай, Б.г.!
Я помню твой шикарный "ликбез" про поведение акселерометра в ракете.
И про то, что акселерометр перестанет чувствовать земное G когда ракета сорвется с места, потому что у него не будет опоры.
И все-же утверждается, что при наклонной траектории в показания акселерометра будет вмешиваться земное G.
Но я говорю об инерционном полете ракеты, где боковые оси должны чувствовать землю, и можно выделить проекции притяжения из ускорения торможения.
(Или я окончательно "затупил")
mihail66> И все-же утверждается,
Кем утверждается?
mihail66> что при наклонной траектории в показания акселерометра будет вмешиваться земное G.
Как именно "будет вмешиваться"?
mihail66> Но я говорю об инерционном полете ракеты, где боковые оси должны чувствовать землю, и можно выделить проекции притяжения из ускорения торможения.
Давай отвлечёмся от ракеты, и будем считать, что у нас сферический мячик. И нет воздуха. Какое ускорение показывают акселерометры в этом мячике при инерционном полёте? При вертикальном полёте и при полёте по параболе?
Кем утверждается?
mihail66> что при наклонной траектории в показания акселерометра будет вмешиваться земное G.
Как именно "будет вмешиваться"?
mihail66> Но я говорю об инерционном полете ракеты, где боковые оси должны чувствовать землю, и можно выделить проекции притяжения из ускорения торможения.
Давай отвлечёмся от ракеты, и будем считать, что у нас сферический мячик. И нет воздуха. Какое ускорение показывают акселерометры в этом мячике при инерционном полёте? При вертикальном полёте и при полёте по параболе?
Б.г.> Кем утверждается?
Эх! Люблю я с тобой беседовать, ты все расставляешь по местам.
Кем и когда это утверждалось, сейчас трудно вспомнить.
Но корни торчат из того места, когда я решил вычислять терминальную скорость по ускорению торможения.
Б.г.> Как именно "будет вмешиваться"?
...что, если ракета полетит отклонившись от вертикали, то "аксель" (в системе акселерометр-ракета) неправильно зарегистрирует -1G из-за отклонения вектора гравитации.
Б.г.> Давай отвлечёмся от ракеты, и будем считать, что у нас сферический мячик. И нет воздуха. Какое ускорение показывают акселерометры в этом мячике при инерционном полёте? При вертикальном полёте и при полёте по параболе?
НОЛЬ.
Эх! Люблю я с тобой беседовать, ты все расставляешь по местам.
Кем и когда это утверждалось, сейчас трудно вспомнить.
Но корни торчат из того места, когда я решил вычислять терминальную скорость по ускорению торможения.
Б.г.> Как именно "будет вмешиваться"?
...что, если ракета полетит отклонившись от вертикали, то "аксель" (в системе акселерометр-ракета) неправильно зарегистрирует -1G из-за отклонения вектора гравитации.
Б.г.> Давай отвлечёмся от ракеты, и будем считать, что у нас сферический мячик. И нет воздуха. Какое ускорение показывают акселерометры в этом мячике при инерционном полёте? При вертикальном полёте и при полёте по параболе?
НОЛЬ.
Б.г.>> Как именно "будет вмешиваться"?
mihail66> ...что, если ракета полетит отклонившись от вертикали, то "аксель" (в системе акселерометр-ракета) неправильно зарегистрирует -1G из-за отклонения вектора гравитации.
Если акселерометр стоит на ракете, он будет показывать ноль или сопротивление воздуха, если воздух есть. Величина сопротивления зависит от скорости, достигнутой высоты и связанной с ней плотности воздуха, миделя ракеты и её аэродинамических коэффициентов. Если продольная ось ракеты не совпадает с вектором скорости, то акселерометры боковых ускорений покажут ненулевые ускорения. Но это не связано с невертикальностью ракеты, а связано с несовпадением скорости и оси ракеты. И величина бокового ускорения никак не связана с g.
Б.г.>> Давай отвлечёмся от ракеты, и будем считать, что у нас сферический мячик. И нет воздуха. Какое ускорение показывают акселерометры в этом мячике при инерционном полёте? При вертикальном полёте и при полёте по параболе?
mihail66> НОЛЬ.
Почему, если в мячике НОЛЬ, то в ракете минус один же?
mihail66> ...что, если ракета полетит отклонившись от вертикали, то "аксель" (в системе акселерометр-ракета) неправильно зарегистрирует -1G из-за отклонения вектора гравитации.
Если акселерометр стоит на ракете, он будет показывать ноль или сопротивление воздуха, если воздух есть. Величина сопротивления зависит от скорости, достигнутой высоты и связанной с ней плотности воздуха, миделя ракеты и её аэродинамических коэффициентов. Если продольная ось ракеты не совпадает с вектором скорости, то акселерометры боковых ускорений покажут ненулевые ускорения. Но это не связано с невертикальностью ракеты, а связано с несовпадением скорости и оси ракеты. И величина бокового ускорения никак не связана с g.
Б.г.>> Давай отвлечёмся от ракеты, и будем считать, что у нас сферический мячик. И нет воздуха. Какое ускорение показывают акселерометры в этом мячике при инерционном полёте? При вертикальном полёте и при полёте по параболе?
mihail66> НОЛЬ.
Почему, если в мячике НОЛЬ, то в ракете минус один же?
Б.г.> Почему, если в мячике НОЛЬ, то в ракете минус один же?
Все что выше я сейчас "переварю".
А в мячике НОЛЬ, потому, что ты в условиях исключил воздух.
Все что выше я сейчас "переварю".
А в мячике НОЛЬ, потому, что ты в условиях исключил воздух.
Б.г.>И величина бокового ускорения никак не связана с g.
Тут мне придется долго "допетривать" до этого явления.
Мне до сих пор кажется, что если ракета находится в торможении, то я смогу определить наклон по амплитуде показаний боковых осей относительно затухающей постоянной ускорения.
Тут мне придется долго "допетривать" до этого явления.
Мне до сих пор кажется, что если ракета находится в торможении, то я смогу определить наклон по амплитуде показаний боковых осей относительно затухающей постоянной ускорения.
Б.г.>>И величина бокового ускорения никак не связана с g.
mihail66> Мне до сих пор кажется, что если ракета находится в торможении, то я смогу определить наклон по амплитуде показаний боковых осей относительно затухающей постоянной ускорения.
Ты можешь определить угол между скоростью и осью ракеты (т.е. угол атаки), но к направлению "же" эти цифры никакого отношения иметь не будут.
mihail66> Мне до сих пор кажется, что если ракета находится в торможении, то я смогу определить наклон по амплитуде показаний боковых осей относительно затухающей постоянной ускорения.
Ты можешь определить угол между скоростью и осью ракеты (т.е. угол атаки), но к направлению "же" эти цифры никакого отношения иметь не будут.
Б.г.>> Почему, если в мячике НОЛЬ, то в ракете минус один же?
mihail66> Все что выше я сейчас "переварю".
mihail66> А в мячике НОЛЬ, потому, что ты в условиях исключил воздух.
А, если вернуть воздух, сколько будет показывать акселерометр в мячике?
mihail66> Все что выше я сейчас "переварю".
mihail66> А в мячике НОЛЬ, потому, что ты в условиях исключил воздух.
А, если вернуть воздух, сколько будет показывать акселерометр в мячике?
Реклама Google — средство выживания форумов :)
Б.г.> Ты можешь определить угол между скоростью и осью ракеты (т.е. угол атаки), но к направлению "же" эти цифры никакого отношения иметь не будут.
Вот над этим я как раз "петрушку" свою и чешу.
Видимо в кровь расчешусь.
Пока не понимаю, почему. Надеюсь "допетрю".
"Угол атаки" мне в помощь.
Б.г.> А, если вернуть воздух, сколько будет показывать акселерометр в мячике?
Ты сейчас меня наверно "побьешь", но с воздухом и вертикально для оси Z - сила торможения минус гравитация, для остальных осей "0".
Если под углом, то сила торможения "-" проекция силы гравитации.
Вот над этим я как раз "петрушку" свою и чешу.
Видимо в кровь расчешусь.
Пока не понимаю, почему. Надеюсь "допетрю".
"Угол атаки" мне в помощь.
Б.г.> А, если вернуть воздух, сколько будет показывать акселерометр в мячике?
Ты сейчас меня наверно "побьешь", но с воздухом и вертикально для оси Z - сила торможения минус гравитация, для остальных осей "0".
Если под углом, то сила торможения "-" проекция силы гравитации.
Copyright © Balancer 1997..2023
Создано 26.06.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 26.06.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
