 yacc
yacc

 инфо
инфо инструменты
инструменты






 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/mt/mtdata/r/r480x-/u9/photo019F/20151023370-0/128x128-crop/original.jpeg)
Моделирование уборки закрылков вместо шасси у Ту-154
Рейс из Сочи, разбившейся по пути в СириюТеги:
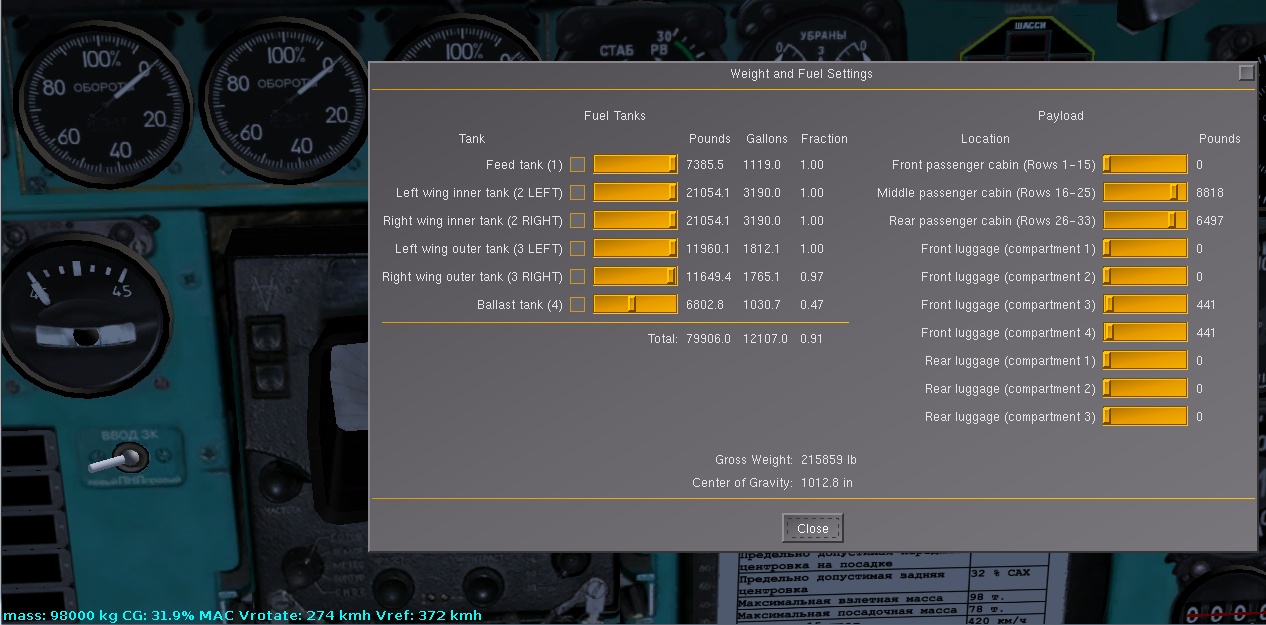
В общем первый блин комом - при автосинхронизации закрылков-стабилизатора он выбирает среднее и независимо от переключателя ставит стаб на -3.
Надо попробовать пошаманить с центровкой - может он ее автоматом просчитывает.
Если нет - писать разработчикам.
Выставлять стаб на 0 от максимального значения руками в полете - тот еще гемор.
Попробовал взлететь с фиксированным 0 - ничего особого не заметил при ошибочной уборке.
Надо попробовать пошаманить с центровкой - может он ее автоматом просчитывает.
Если нет - писать разработчикам.
Выставлять стаб на 0 от максимального значения руками в полете - тот еще гемор.
Попробовал взлететь с фиксированным 0 - ничего особого не заметил при ошибочной уборке.


yacc> В общем первый блин комом - при автосинхронизации закрылков-стабилизатора он выбирает среднее и независимо от переключателя ставит стаб на -3.
Про Б2 не скажу, а у эмки, при задней центровке (если 32% то уже задняя) стаб, в автомате, на нуле, при средней - -1.5 градуса, при задней - -3 градуса.
Центровки
Передняя - 18-24%
Средняя - 24-32%
Задняя - 32-40%
Положение стабилизатора при взлёте (закрылки 15, 28)
Передняя - 3.0
Средняя - 1.5
Задняя - 0
Положение стабилизатора при посадке (закрылки 36, 45)
Передняя - 5.5
Средняя - 3.0
Задняя - 0
yacc> Надо попробовать пошаманить с центровкой - может он ее автоматом просчитывает.
Вообще-то, в симуляторе, центровка естественно считается, как без неё? В какую-то внутреннюю переменную. А вот показывается ли она в данной модели, я не знаю. В эмке, в менеджере загрузки, показывается.
yacc> Если нет - писать разработчикам.
Нинада. Птоиды, они такие птоиды")
yacc> Выставлять стаб на 0 от максимального значения руками в полете - тот еще гемор.
А ты вообще проверь работу сего стаба. Сбалансируй самолёт по тангажу в полёте, и ручками переложи стаб. Посмотри реакцию. Если сделано мало-мальски правильно, то при перекладке стаба самолёт должен начать задирать нос при перекладки от 0 к какому-то значению.
yacc> Попробовал взлететь с фиксированным 0 - ничего особого не заметил при ошибочной уборке.
Если центровка задняя - согласованное положение стабилизатора 0 градусов.
Про Б2 не скажу, а у эмки, при задней центровке (если 32% то уже задняя) стаб, в автомате, на нуле, при средней - -1.5 градуса, при задней - -3 градуса.
Центровки
Передняя - 18-24%
Средняя - 24-32%
Задняя - 32-40%
Положение стабилизатора при взлёте (закрылки 15, 28)
Передняя - 3.0
Средняя - 1.5
Задняя - 0
Положение стабилизатора при посадке (закрылки 36, 45)
Передняя - 5.5
Средняя - 3.0
Задняя - 0
yacc> Надо попробовать пошаманить с центровкой - может он ее автоматом просчитывает.
Вообще-то, в симуляторе, центровка естественно считается, как без неё? В какую-то внутреннюю переменную. А вот показывается ли она в данной модели, я не знаю. В эмке, в менеджере загрузки, показывается.
yacc> Если нет - писать разработчикам.
Нинада. Птоиды, они такие птоиды
yacc> Выставлять стаб на 0 от максимального значения руками в полете - тот еще гемор.
А ты вообще проверь работу сего стаба. Сбалансируй самолёт по тангажу в полёте, и ручками переложи стаб. Посмотри реакцию. Если сделано мало-мальски правильно, то при перекладке стаба самолёт должен начать задирать нос при перекладки от 0 к какому-то значению.
yacc> Попробовал взлететь с фиксированным 0 - ничего особого не заметил при ошибочной уборке.
Если центровка задняя - согласованное положение стабилизатора 0 градусов.
VVSFalcon> Про Б2 не скажу, а у эмки, при задней центровке (если 32% то уже задняя) стаб, в автомате, на нуле, при средней - -1.5 градуса, при задней - -3 градуса.
Это я про FlightGear - при автостарте он ставит переднюю но стаб ( по указателю ) ставится на -3 и переключатель центровки никак не меняет его положения - а ручками - это мышкой открывать крышку и тумблер туда-сюда - совсем тоскливо.
yacc>> Надо попробовать пошаманить с центровкой - может он ее автоматом просчитывает.
VVSFalcon> Вообще-то, в симуляторе, центровка естественно считается, как без неё? В какую-то внутреннюю переменную. А вот показывается ли она в данной модели, я не знаю. В эмке, в менеджере загрузки, показывается.
Тут тоже подсчитывается, но в каких-то странных единицах - в дюймах
yacc>> Если нет - писать разработчикам.
VVSFalcon> Нинада. Птоиды, они такие птоиды
Не - я ребятам из команды FG которые модель сконвертировали.
VVSFalcon> А ты вообще проверь работу сего стаба. Сбалансируй самолёт по тангажу в полёте, и ручками переложи стаб.
Да могу и на взлете - по ходу штурвала - это же сразу почувствуется
VVSFalcon> Если центровка задняя - согласованное положение стабилизатора 0 градусов.
Пытался я с таким взлетать - вроде норм.
Вот только я не уверен что у FG такой моделью я сделал именно заднюю.
Обновление: так, оставлю себе для ссылки

Это я про FlightGear - при автостарте он ставит переднюю но стаб ( по указателю ) ставится на -3 и переключатель центровки никак не меняет его положения - а ручками - это мышкой открывать крышку и тумблер туда-сюда - совсем тоскливо.
yacc>> Надо попробовать пошаманить с центровкой - может он ее автоматом просчитывает.
VVSFalcon> Вообще-то, в симуляторе, центровка естественно считается, как без неё? В какую-то внутреннюю переменную. А вот показывается ли она в данной модели, я не знаю. В эмке, в менеджере загрузки, показывается.
Тут тоже подсчитывается, но в каких-то странных единицах - в дюймах
yacc>> Если нет - писать разработчикам.
VVSFalcon> Нинада. Птоиды, они такие птоиды
Не - я ребятам из команды FG которые модель сконвертировали.
VVSFalcon> А ты вообще проверь работу сего стаба. Сбалансируй самолёт по тангажу в полёте, и ручками переложи стаб.
Да могу и на взлете - по ходу штурвала
- это же сразу почувствуетсяVVSFalcon> Если центровка задняя - согласованное положение стабилизатора 0 градусов.
Пытался я с таким взлетать - вроде норм.
Вот только я не уверен что у FG такой моделью я сделал именно заднюю.
Обновление: так, оставлю себе для ссылки
Центровка в процентах САХ - Динамика
Центровка в процентах САХ - отправлено в Динамика: Возникла у меня мысль сделать сервисный приборчик, для показа центровки. Симулятор вычисляет положение центра тяжести самолета и отдает его в виде трех координат. Нас интересует продольная составляющая. Есть положение CG относительно нуля координат (смещение), ноль в данном случае - крайняя передняя точка машины. Есть геометрия самолета - известно, где расположено у него крыло, его размеры. Крыло прямоугольное, т.е. как я понимаю, в этом с... // www.avsim.su
Это сообщение редактировалось 11.01.2017 в 15:09
yacc> Это я про FlightGear - при автостарте он ставит переднюю но стаб ( по указателю ) ставится на -3 и переключатель центровки никак не меняет его положения - а ручками - это мышкой открывать крышку и тумблер туда-сюда - совсем тоскливо.
Я, предлагая MSFS и IGFly 154М, знаю, что и как там работает. Так что, не просто так предлагаю
yacc> yacc>> Надо попробовать пошаманить с центровкой - может он ее автоматом просчитывает.
yacc> Тут тоже подсчитывается, но в каких-то странных единицах - в дюймах
САХ переводим в дюймы и считаем сколько процентов дюймы "центровки" составляют от САХ. Думаю так.
yacc> yacc>> Если нет - писать разработчикам.
yacc> Не - я ребятам из команды FG которые модель сконвертировали.
Какую модель? Флайт? Дык:
1. Я вообще всяким конвертациям не особо доверяю.
2. А уж в сложных случаях (а ПТ, при всём моём неоднозначном к нему отношении), таки сложный случай, тем более.
3. Просто флайтмодель той же эмки переводить бессмысленно, ибо там перевязаны и флайтмодель, и панель (программная часть самолёта), и визуальная модель. Да ещё и через нестандартные методы. У ПТ для MSFS думаю тоже.
yacc> Да могу и на взлете - по ходу штурвала - это же сразу почувствуется
Эксперимент должен быть чистым.
Я, предлагая MSFS и IGFly 154М, знаю, что и как там работает. Так что, не просто так предлагаю
yacc> yacc>> Надо попробовать пошаманить с центровкой - может он ее автоматом просчитывает.
yacc> Тут тоже подсчитывается, но в каких-то странных единицах - в дюймах
САХ переводим в дюймы и считаем сколько процентов дюймы "центровки" составляют от САХ. Думаю так.
yacc> yacc>> Если нет - писать разработчикам.
yacc> Не - я ребятам из команды FG которые модель сконвертировали.
Какую модель? Флайт? Дык:
1. Я вообще всяким конвертациям не особо доверяю.
2. А уж в сложных случаях (а ПТ, при всём моём неоднозначном к нему отношении), таки сложный случай, тем более.
3. Просто флайтмодель той же эмки переводить бессмысленно, ибо там перевязаны и флайтмодель, и панель (программная часть самолёта), и визуальная модель. Да ещё и через нестандартные методы. У ПТ для MSFS думаю тоже.
yacc> Да могу и на взлете - по ходу штурвала
- это же сразу почувствуетсяЭксперимент должен быть чистым.
VVSFalcon> Я, предлагая MSFS и IGFly 154М, знаю, что и как там работает. Так что, не просто так предлагаю
Если все будет тускло - попрошу у тебя помощи
VVSFalcon> САХ переводим в дюймы и считаем сколько процентов дюймы "центровки" составляют от САХ. Думаю так.
Только там этих 1007.4 дюймов это 25.6 метров
VVSFalcon> Какую модель? Флайт? Дык:
И флайт и 3Д модель
VVSFalcon> Эксперимент должен быть чистым.
Вечерком попробую.
Думаю вообще потренироваться 320 км/ч держать - просто набирать высоту и держать - заодно подыскать положение триммера чтобы руки меньше уставали
Если все будет тускло - попрошу у тебя помощи
VVSFalcon> САХ переводим в дюймы и считаем сколько процентов дюймы "центровки" составляют от САХ. Думаю так.
Только там этих 1007.4 дюймов это 25.6 метров
VVSFalcon> Какую модель? Флайт? Дык:
И флайт и 3Д модель
VVSFalcon> Эксперимент должен быть чистым.
Вечерком попробую.
Думаю вообще потренироваться 320 км/ч держать - просто набирать высоту и держать - заодно подыскать положение триммера чтобы руки меньше уставали
VVSFalcon>> Какую модель? Флайт? Дык:
yacc> И флайт и 3Д модель
Тускло. Лучше взять таки MSFS и сделанные специально под него, ПТ или IGFly/
yacc> Думаю вообще потренироваться 320 км/ч держать - просто набирать высоту и держать - заодно подыскать положение триммера чтобы руки меньше уставали
Пфуй!
Набрал высоту, включил режим стабилизации Н, установил обороты, чтобы скорость стабилизировалась (хоть это и не по РЛЭ, можно и автоматом тяги воспользоваться) и крутишь стаб. Смотришь на указатель РВ (совмещённый указатель положения стабилизатора и руля высоты), он всё покажет.
yacc> И флайт и 3Д модель
Тускло. Лучше взять таки MSFS и сделанные специально под него, ПТ или IGFly/
yacc> Думаю вообще потренироваться 320 км/ч держать - просто набирать высоту и держать - заодно подыскать положение триммера чтобы руки меньше уставали
Пфуй!
Набрал высоту, включил режим стабилизации Н, установил обороты, чтобы скорость стабилизировалась (хоть это и не по РЛЭ, можно и автоматом тяги воспользоваться) и крутишь стаб. Смотришь на указатель РВ (совмещённый указатель положения стабилизатора и руля высоты), он всё покажет.
VVSFalcon> Тускло. Лучше взять таки MSFS и сделанные специально под него, ПТ или IGFly/
Мне FG больше нравится поэтому попробую сначала из него выжать
А там видно будет
VVSFalcon> Пфуй!
VVSFalcon> Набрал высоту, включил режим стабилизации Н
Скучно Вот когда оттримировал и самолет идет сам - интереснее
Нет автоматики на взлете - она уже на круге появляется.
Мне FG больше нравится поэтому попробую сначала из него выжать
А там видно будет
VVSFalcon> Пфуй!
VVSFalcon> Набрал высоту, включил режим стабилизации Н
Скучно
Вот когда оттримировал и самолет идет сам - интереснее Нет автоматики на взлете - она уже на круге появляется.
yacc> Скучно Вот когда оттримировал и самолет идет сам - интереснее
Задача-то не веселье, а определение работы горизонтального стабилизатора.
А для веселья, ну слетай ноченькой в СМУ ULLI 28R - UUEE. Без подглядывания в жыпыэс, пользуясь только радиосредствами. С выходом и заходом по схемам (пусть и старым, если надо, могу заслать). Для большего драйва - в UUDD. А то и вообще, в Иннсбрук
yacc> Нет автоматики на взлете - она уже на круге появляется.
Дык, "набрал высоту, сбалансировал . . ." это что, взлёт?
Вот когда оттримировал и самолет идет сам - интереснее Задача-то не веселье, а определение работы горизонтального стабилизатора.
А для веселья, ну слетай ноченькой в СМУ ULLI 28R - UUEE. Без подглядывания в жыпыэс, пользуясь только радиосредствами. С выходом и заходом по схемам (пусть и старым, если надо, могу заслать). Для большего драйва - в UUDD. А то и вообще, в Иннсбрук
yacc> Нет автоматики на взлете - она уже на круге появляется.
Дык, "набрал высоту, сбалансировал . . ." это что, взлёт?
yacc>> Скучно Вот когда оттримировал и самолет идет сам - интереснее
VVSFalcon> Задача-то не веселье, а определение работы горизонтального стабилизатора.
Я-то вообще-то про взлет
VVSFalcon> Дык, "набрал высоту, сбалансировал . . ." это что, взлёт?
Вообще-то тот же пилотаж сначала отрабатывают на высоте или катастрофы - тоже ( скажем с противоштопорным парашютом и выпуском шасси для моделирования поведения на посадке )
Ну и ты не понял - не набрать - а набИрать. Руками стабилизировать режим ( к примеру ) 320 приборной 5 вертикальной. Я так на цессне отрабатывал этапы круга.
Ставишь режим и держишь, потом триммером снимаешь нагрузку так чтобы штурвал на месте был.
Тогда после взлета руль на себя, щелк N раз на триммер ( особенности сим ) и самолет сам летит при нейтральном штурвале в нужном тебе режиме - только чуть-чуть кончиками пальчиков поправляешь.
В реальном ( и полнокабинном ) - по-другому - штурвал оттянул и нажал триммер - как почувствовал что нагрузка ушла - так и управлять легко.
Вот когда оттримировал и самолет идет сам - интереснее VVSFalcon> Задача-то не веселье, а определение работы горизонтального стабилизатора.
Я-то вообще-то про взлет
VVSFalcon> Дык, "набрал высоту, сбалансировал . . ." это что, взлёт?
Вообще-то тот же пилотаж сначала отрабатывают на высоте или катастрофы - тоже ( скажем с противоштопорным парашютом и выпуском шасси для моделирования поведения на посадке )
Ну и ты не понял - не набрать - а набИрать. Руками стабилизировать режим ( к примеру ) 320 приборной 5 вертикальной. Я так на цессне отрабатывал этапы круга.
Ставишь режим и держишь, потом триммером снимаешь нагрузку так чтобы штурвал на месте был.
Тогда после взлета руль на себя, щелк N раз на триммер ( особенности сим ) и самолет сам летит при нейтральном штурвале в нужном тебе режиме - только чуть-чуть кончиками пальчиков поправляешь.
В реальном ( и полнокабинном ) - по-другому - штурвал оттянул и нажал триммер - как почувствовал что нагрузка ушла - так и управлять легко.
yacc> Я-то вообще-то про взлет
Ну да, но, чтобы определить, более или менее правильно-ли мы моделируем взлёт, надо разобраться, а участвует-ли реально в нашей модели такая немаловажная составляющая, как перекладка горизонтального стабилизатора.
yacc> Ну и ты не понял - не набрать - а набИрать. Руками стабилизировать режим ( к примеру ) 320 приборной 5 вертикальной. Я так на цессне отрабатывал этапы круга.
Та ниии, я всё понял. Просто описал один из простых способов определения участия в нашей модели перекладки стабилизатора. Если он участвует по результатам эксперимента, то, естественно, участвует и на взлёте. А если нет - что же мы моделируем?
yacc> Ставишь режим и держишь, потом триммером снимаешь нагрузку так чтобы штурвал на месте был.
Можно конечно помучаться Напоминаю, описывался метод решения задачи "а участвует в нашей модели такая сущность, как перекладка стабилизатора", или просто стрелочка на приборе движется.
yacc> В реальном ( и полнокабинном ) - по-другому - штурвал оттянул и нажал триммер - как почувствовал что нагрузка ушла - так и управлять легко.
Одна из причин, почему в IGFly автопилот рулит по тангажу через "триммер руля высоты" в терминах симулятора, а не через руль высоты, это то, что, с точки зрения реальной модели полёта, заложенной в СИМ, "триммер руля высоты" на самом деле и есть стабилизатор (с точки зрения физики процесса). Но, что характерно, в эмке стабилизатор таки реально перекладывается (с точки зрения симовской флайтмодели), используя некоторые особенности симовской модели полёта. А так-то, с точки зрения алгоритмов, без разницы, можно и РВ автопилоту рулить, но, для симмера будет крайне неудобно (при отключении стабилизации джой сразу вернёт РВ в нейтраль, что в общем случае, вызовет возникновение момента по тангажу). Можно конечно заюзать своё автотриммирование в алгоритме во избежание такой ситуации, но, учитывая вышеописанную особенность реализации флайтмодели в симе это фактически и будет "рулить через стаб". Так зачем огород городить?
PS В эмке автопилот полностью кастомный. С точки зрения симулятора у 154М от IGFly автопилота нету")
PPS Для сохранности, ну и вдруг, полезно кому будет.
Выдержка из переписки с издателем.
Из формально недокументированных для юзера фич.
Panel.CFG
[IGFly]
UseSplash= если поставить 1 - то однократно будет показано Splash сообщение при загрузке самолёта и значение ключа будет скинуто в 0
AutoLandEnabled= если не 0 то при заходе в автоматическом режиме на высоте 25М, если не отключить автопилот (режим ЗАХОД) включится режим автопосадки.
MinAutoRudderAltitude=20.0 - значение высоты в метрах ниже которой принудительно отключается режим автокоординации, а выше - принудительно включается. Значение по умолчанию 20 метров. Минимальное значение - 10 метров, максимальное - 100 метров.
ShowFOMsg= если не 0, то будут выводиться в текстовую строку вверху экрана сообщения второго пилота - Vr, V2 и отсчёты высоты на посадке. По умолчанию - выключено
ShowAdviseMsg= если не 0, то в бегущую строку (подобно АТИС) будут выводиться сообщения подсказки при некоторых некорректных действиях. По умолчанию - выключено.
Боковые виды.
Режим боковых видов управляется с помощью мышиной зоны, расположенной сразу над пиктограммами переключения панелей на основной панели.
В режиме Wing View
VIEW_LEFT (Shift+Numpad4) и VIEW_RIGHT (Shift+Numpad6) - виды на левое и правое крыло с места пассажиров второго салона за крылом - т.е. вбок и вперёд
VIEW_REAR_LEFT_UP (Ctrl+Numpad1) и VIEW_REAR_RIGHT_UP (Ctrl+Numpad3) - виды на крылья из первого салона - т.е. вбок и назад
VIEW_FORWARD_LEFT_UP (Ctrl+Numpad7) и VIEW_FORWARD_RIGHT_UP (Ctrl+Numpad9) - виды на шасси из под крыла.
Виды направо и налево немного не совпадают в парах как по углам зрения, так и по координатам точек зрения. Это сделано с целью придать некоторую "живость и естественность" картинке.
Ну да, но, чтобы определить, более или менее правильно-ли мы моделируем взлёт, надо разобраться, а участвует-ли реально в нашей модели такая немаловажная составляющая, как перекладка горизонтального стабилизатора.
yacc> Ну и ты не понял - не набрать - а набИрать. Руками стабилизировать режим ( к примеру ) 320 приборной 5 вертикальной. Я так на цессне отрабатывал этапы круга.
Та ниии, я всё понял. Просто описал один из простых способов определения участия в нашей модели перекладки стабилизатора. Если он участвует по результатам эксперимента, то, естественно, участвует и на взлёте. А если нет - что же мы моделируем?
yacc> Ставишь режим и держишь, потом триммером снимаешь нагрузку так чтобы штурвал на месте был.
Можно конечно помучаться
Напоминаю, описывался метод решения задачи "а участвует в нашей модели такая сущность, как перекладка стабилизатора", или просто стрелочка на приборе движется.yacc> В реальном ( и полнокабинном ) - по-другому - штурвал оттянул и нажал триммер - как почувствовал что нагрузка ушла - так и управлять легко.
Одна из причин, почему в IGFly автопилот рулит по тангажу через "триммер руля высоты" в терминах симулятора, а не через руль высоты, это то, что, с точки зрения реальной модели полёта, заложенной в СИМ, "триммер руля высоты" на самом деле и есть стабилизатор (с точки зрения физики процесса). Но, что характерно, в эмке стабилизатор таки реально перекладывается (с точки зрения симовской флайтмодели), используя некоторые особенности симовской модели полёта. А так-то, с точки зрения алгоритмов, без разницы, можно и РВ автопилоту рулить, но, для симмера будет крайне неудобно (при отключении стабилизации джой сразу вернёт РВ в нейтраль, что в общем случае, вызовет возникновение момента по тангажу). Можно конечно заюзать своё автотриммирование в алгоритме во избежание такой ситуации, но, учитывая вышеописанную особенность реализации флайтмодели в симе это фактически и будет "рулить через стаб". Так зачем огород городить?
PS В эмке автопилот полностью кастомный. С точки зрения симулятора у 154М от IGFly автопилота нету
PPS Для сохранности, ну и вдруг, полезно кому будет.
Выдержка из переписки с издателем.
Из формально недокументированных для юзера фич.
Panel.CFG
[IGFly]
UseSplash= если поставить 1 - то однократно будет показано Splash сообщение при загрузке самолёта и значение ключа будет скинуто в 0
AutoLandEnabled= если не 0 то при заходе в автоматическом режиме на высоте 25М, если не отключить автопилот (режим ЗАХОД) включится режим автопосадки.
MinAutoRudderAltitude=20.0 - значение высоты в метрах ниже которой принудительно отключается режим автокоординации, а выше - принудительно включается. Значение по умолчанию 20 метров. Минимальное значение - 10 метров, максимальное - 100 метров.
ShowFOMsg= если не 0, то будут выводиться в текстовую строку вверху экрана сообщения второго пилота - Vr, V2 и отсчёты высоты на посадке. По умолчанию - выключено
ShowAdviseMsg= если не 0, то в бегущую строку (подобно АТИС) будут выводиться сообщения подсказки при некоторых некорректных действиях. По умолчанию - выключено.
Боковые виды.
Режим боковых видов управляется с помощью мышиной зоны, расположенной сразу над пиктограммами переключения панелей на основной панели.
В режиме Wing View
VIEW_LEFT (Shift+Numpad4) и VIEW_RIGHT (Shift+Numpad6) - виды на левое и правое крыло с места пассажиров второго салона за крылом - т.е. вбок и вперёд
VIEW_REAR_LEFT_UP (Ctrl+Numpad1) и VIEW_REAR_RIGHT_UP (Ctrl+Numpad3) - виды на крылья из первого салона - т.е. вбок и назад
VIEW_FORWARD_LEFT_UP (Ctrl+Numpad7) и VIEW_FORWARD_RIGHT_UP (Ctrl+Numpad9) - виды на шасси из под крыла.
Виды направо и налево немного не совпадают в парах как по углам зрения, так и по координатам точек зрения. Это сделано с целью придать некоторую "живость и естественность" картинке.
Это сообщение редактировалось 11.01.2017 в 16:59
VVSFalcon> Ну да, но, чтобы определить, более или менее правильно-ли мы моделируем взлёт, надо разобраться, а участвует-ли реально в нашей модели такая немаловажная составляющая, как перекладка горизонтального стабилизатора.
Я тебя понял но я речь вот о чем веду - смоделировать триммером для начала "идеального" КВС, который после отрыва идеально держит V2+40 ( как только ее достигнет ). Это можно подобрать триммером - НЯЗ в FG триммер моделируется отклонением РВ от нулевого положения.
А уж имея штурвал на нейтрали ( т.е. без нагрузки - как бы его после отрыва стриммировал "идеальный" КВС ) будет понятнее реакция КВС когда что-то пошло не то...
Я вот о чем - чтобы не высматривать тангаж по АГ ( или угол атаки ) а просто самолет шел бы с V2+40 в наборе с выпущенными шасси и механизацией. А уж потом - учесть закрылки и перекладку стаба
Я тебя понял но я речь вот о чем веду - смоделировать триммером для начала "идеального" КВС, который после отрыва идеально держит V2+40 ( как только ее достигнет ). Это можно подобрать триммером - НЯЗ в FG триммер моделируется отклонением РВ от нулевого положения.
А уж имея штурвал на нейтрали ( т.е. без нагрузки - как бы его после отрыва стриммировал "идеальный" КВС ) будет понятнее реакция КВС когда что-то пошло не то...
Я вот о чем - чтобы не высматривать тангаж по АГ ( или угол атаки ) а просто самолет шел бы с V2+40 в наборе с выпущенными шасси и механизацией. А уж потом - учесть закрылки и перекладку стаба
yacc> А уж имея штурвал на нейтрали ( т.е. без нагрузки - как бы его после отрыва стриммировал "идеальный" КВС ) будет понятнее реакция КВС когда что-то пошло не то...
Всё равно точно не получится. Запас рулей так не смоделируешь. ИМХО.
Ещё данных подкину. Режимы работы двигателей (N2 он же КВД)
Наземные (Р=760мм, t=+15Co)
Взлётный - 94.5-96%
Номинальный - 93-95%
Посадочный МГ - 81-83.5%
МГ - 59.5-61.5%
Высотные (H=11км, М=0.8, СА (стандартная атмосфера))
Взлётный - 95.5-97.5%
Номинальный - 93-95%
Посадочный МГ - 81-83.5%
МГ - 78%
Есть ещё данные по тяге. Вот, потратить время, что-ли, проверить совпадение характеристик модели с данными? Ну, или, по крайней мере зависимостей.
Режимы на эшелоне.
Дальность 3000 км и менее - наиболее выгоден максимальный крейсерский режим. TAS=900 км/ч, IAS=528 км/ч, М=0.85, эшелон 11 000 - 12 000. Набор на IAS=575 км/ч до 9 750 м, далее при М=0.85.
Дальность более 3000 км - наиболее выгоден режим максимальной дальности. TAS=850 км/ч, IAS=500 км/ч, М=0.8, эшелон 11 000 - 12 000. Набор на IAS=550 км/ч до 9 450 м, далее при М=0.8.
При запасе топлива 39 750 кг, дальность 6 500 - 7 000 км, АНЗ 6 000кг.
Наивыгоднейшие эшелоны.
Дальность (км)
500 - 10 100 м/10 600 м
600-1 500 - 11 100 м/11 600 м
1 600 и более - 11 100 - 12 00 м/11 600 - 12 600 м
К вопросу о сваливании на эшелоне - при полёте на максимальном эшелоне (11 100 при m = 100 тонн, 12 100 м при m <= 85 т) восходящий порыв ветра 10-12 м/с вызывает срабатывание АУАСП, а 15-18 м/с тряску, а затем сваливание.
При любой массе разрешается занимать 11 100 м., при массе 85 тонн и менее 12 100 м.1
Снижение - с эшелона до 3 000 м на скоростях и числах М соответствующих режимов набора высоты. Интерцепторы выше 7 000 м до 30 град, 7 000 - 3 000 м до 45 град. Ниже 3 000м интерцепторы убираются.
3 000м - высота эшелона перехода, приборная не более 500 км/ч, вертикальная не более 15 м/с.
Эшелон перехода - высота круга, приборная не более 450 км/ч, вертикальная не более 7 м/с.
Скорости в глиссаде при закрылках 36 градусов.
Масса (т) - Скорость (км/ч)
90-92 - 285
88-90 - 285
86-88 - 280
84-86 - 275
82-84 - 275
80-82 - 270
Разрешается превышение на 5 км/ч.
NB Глиссаду по высоте держат РУДами Поперечные отклонения устраняются доворотами с кренами не более 5 градусов скоординированными разворотами на 2 - 3 градуса.
1 - после катастрофы в Донецке в 2005 году, 11 300м.
Всё равно точно не получится. Запас рулей так не смоделируешь. ИМХО.
Ещё данных подкину. Режимы работы двигателей (N2 он же КВД)
Наземные (Р=760мм, t=+15Co)
Взлётный - 94.5-96%
Номинальный - 93-95%
Посадочный МГ - 81-83.5%
МГ - 59.5-61.5%
Высотные (H=11км, М=0.8, СА (стандартная атмосфера))
Взлётный - 95.5-97.5%
Номинальный - 93-95%
Посадочный МГ - 81-83.5%
МГ - 78%
Есть ещё данные по тяге. Вот, потратить время, что-ли, проверить совпадение характеристик модели с данными? Ну, или, по крайней мере зависимостей.
Режимы на эшелоне.
Дальность 3000 км и менее - наиболее выгоден максимальный крейсерский режим. TAS=900 км/ч, IAS=528 км/ч, М=0.85, эшелон 11 000 - 12 000. Набор на IAS=575 км/ч до 9 750 м, далее при М=0.85.
Дальность более 3000 км - наиболее выгоден режим максимальной дальности. TAS=850 км/ч, IAS=500 км/ч, М=0.8, эшелон 11 000 - 12 000. Набор на IAS=550 км/ч до 9 450 м, далее при М=0.8.
При запасе топлива 39 750 кг, дальность 6 500 - 7 000 км, АНЗ 6 000кг.
Наивыгоднейшие эшелоны.
Дальность (км)
500 - 10 100 м/10 600 м
600-1 500 - 11 100 м/11 600 м
1 600 и более - 11 100 - 12 00 м/11 600 - 12 600 м
К вопросу о сваливании на эшелоне - при полёте на максимальном эшелоне (11 100 при m = 100 тонн, 12 100 м при m <= 85 т) восходящий порыв ветра 10-12 м/с вызывает срабатывание АУАСП, а 15-18 м/с тряску, а затем сваливание.
При любой массе разрешается занимать 11 100 м., при массе 85 тонн и менее 12 100 м.1
Снижение - с эшелона до 3 000 м на скоростях и числах М соответствующих режимов набора высоты. Интерцепторы выше 7 000 м до 30 град, 7 000 - 3 000 м до 45 град. Ниже 3 000м интерцепторы убираются.
3 000м - высота эшелона перехода, приборная не более 500 км/ч, вертикальная не более 15 м/с.
Эшелон перехода - высота круга, приборная не более 450 км/ч, вертикальная не более 7 м/с.
Скорости в глиссаде при закрылках 36 градусов.
Масса (т) - Скорость (км/ч)
90-92 - 285
88-90 - 285
86-88 - 280
84-86 - 275
82-84 - 275
80-82 - 270
Разрешается превышение на 5 км/ч.
NB Глиссаду по высоте держат РУДами
Поперечные отклонения устраняются доворотами с кренами не более 5 градусов скоординированными разворотами на 2 - 3 градуса.1 - после катастрофы в Донецке в 2005 году, 11 300м.
Это сообщение редактировалось 11.01.2017 в 20:05
yacc>> В общем первый блин комом - при автосинхронизации закрылков-стабилизатора он выбирает среднее и
VVSFalcon> Центровки
VVSFalcon> Задняя - 32-40%
Ура - получилось!
Ребята с форума подсказали, что если нажать на указатель стабилизатора - внизу появляется подсказка по центровке.
И для автосинхронизации надо убрать закрылки, потом поставить переключатель центровки, потом выпустить - тогда работает.
В общем - работаю над логом параметров и подборе скоростей.
Удалось сегодня свалить в штопор!
На задней центровке выставил 3 градуса стабилизатора вручную, затриммировал руль высоты примерно на 5 градусов на кабрирование - что примерно соответствует положению триммирования на скорость 320 при нулевом угле установки стабилизатора при выпущенных закрылках/шасси - а после убрал закрылки ( стаб остался на 3 градуса ) и отпустил руль:
Самолет задрал нос, потерял нафиг скорость и свалился в штопор
VVSFalcon> Центровки
VVSFalcon> Задняя - 32-40%
Ура - получилось!
Ребята с форума подсказали, что если нажать на указатель стабилизатора - внизу появляется подсказка по центровке.
И для автосинхронизации надо убрать закрылки, потом поставить переключатель центровки, потом выпустить - тогда работает.
В общем - работаю над логом параметров и подборе скоростей.
Удалось сегодня свалить в штопор!
На задней центровке выставил 3 градуса стабилизатора вручную, затриммировал руль высоты примерно на 5 градусов на кабрирование - что примерно соответствует положению триммирования на скорость 320 при нулевом угле установки стабилизатора при выпущенных закрылках/шасси - а после убрал закрылки ( стаб остался на 3 градуса ) и отпустил руль:
Самолет задрал нос, потерял нафиг скорость и свалился в штопор
Прикреплённые файлы:
yacc> Удалось сегодня свалить в штопор!
yacc> На задней центровке выставил . . .
Я конечно разделяю твою радость от успехов, но, можно было закрылки и не убирать, а просто отпустить штурвал. При таком-то моменте на кабирование (ЗЦ + стаб аж на 3 градуса + РВ на кабирование на 5 градусов). Оно бы само свалилось
yacc> На задней центровке выставил . . .
Я конечно разделяю твою радость от успехов, но, можно было закрылки и не убирать, а просто отпустить штурвал. При таком-то моменте на кабирование (ЗЦ + стаб аж на 3 градуса + РВ на кабирование на 5 градусов). Оно бы само свалилось
VVSFalcon> Я конечно разделяю твою радость от успехов, но, можно было закрылки и не убирать, а просто отпустить штурвал.
Да я так... усложнил.
Два вечера потратил на то, чтобы извлечь данные модели полета в csv плюс пришлось небольшой питоновский скрипт написать для приведения их к божескому виду и вот могу похвалиться двумя первыми минутами просто тестового полета с уборкой закрылков вместо шасси !
Upd
Добавлю - отрыв примерно через 40 сек - разбег - 2000 м
На 70 секунде ( от начала старта ) - высота 150 м, удаление 5.5 км ( от точки старта )
Уборка закрылков - начало - 76 секунда, удаление - 6.2 км, высота 214 м
Уборка закрылков - окончание - 91 секунда, удаление - 7.9 км, высота 420 м
Да я так... усложнил.
Два вечера потратил на то, чтобы извлечь данные модели полета в csv плюс пришлось небольшой питоновский скрипт написать для приведения их к божескому виду и вот могу похвалиться двумя первыми минутами просто тестового полета с уборкой закрылков вместо шасси !
Upd
Добавлю - отрыв примерно через 40 сек - разбег - 2000 м
На 70 секунде ( от начала старта ) - высота 150 м, удаление 5.5 км ( от точки старта )
Уборка закрылков - начало - 76 секунда, удаление - 6.2 км, высота 214 м
Уборка закрылков - окончание - 91 секунда, удаление - 7.9 км, высота 420 м
Прикреплённые файлы:
Это сообщение редактировалось 16.01.2017 в 00:57
Снял графики нормального взлета ( ну, насколько получилось )
)
Прикреплённые файлы:
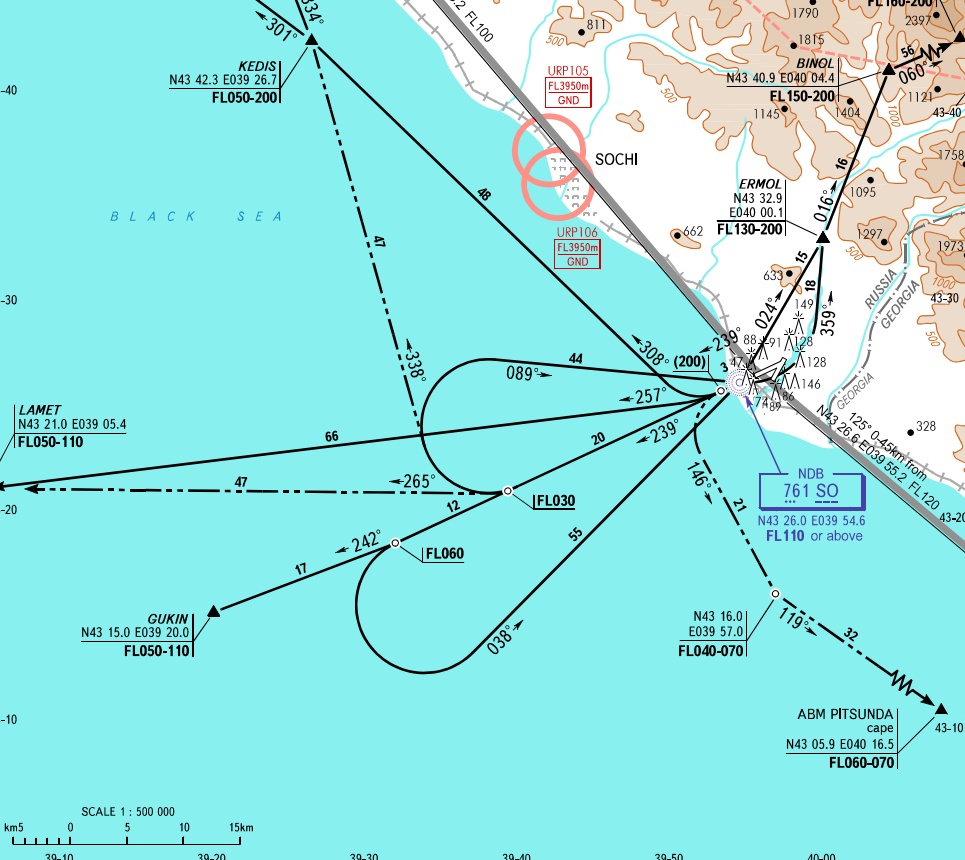
Кстати, складывается впечатление ( по дальностям ), что полет проходил в направлении точки KEDIS - т.е. после взлета и ухода примерно на 4-5 км удаления от места взлета идет вираж направо на новый курс 308 и по трассе 48 до нужной точки.
При этом это происходит на высоте примерно 200 метров примерно через 25-30 секунд после отрыва.
В такой ситуации неразумно убирать закрылки ИМХО, хотя формально успеваем их убрать до 15 еще на прямой.
Только так объясняется и место нахождения и 70 секунд. При этом 70 секунд - это именно полет - т.е. после отрыва. Надо будет, в общем, попробовать сделать вираж на 90 с креном порядка 15 градусов.
При этом это происходит на высоте примерно 200 метров примерно через 25-30 секунд после отрыва.
В такой ситуации неразумно убирать закрылки ИМХО, хотя формально успеваем их убрать до 15 еще на прямой.
Только так объясняется и место нахождения и 70 секунд. При этом 70 секунд - это именно полет - т.е. после отрыва. Надо будет, в общем, попробовать сделать вираж на 90 с креном порядка 15 градусов.
Прикреплённые файлы:
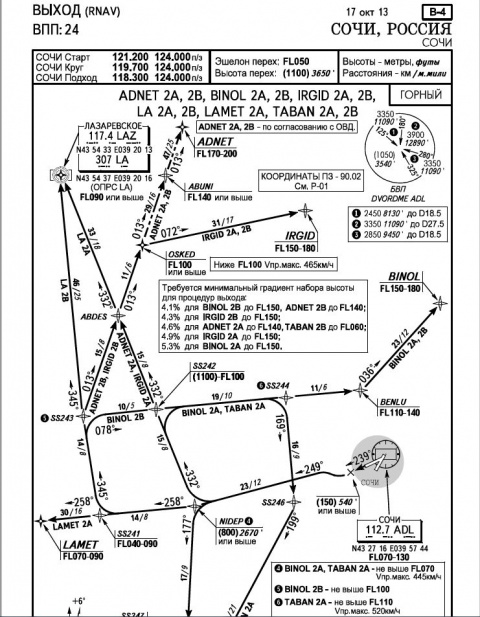
yacc> Кстати, складывается впечатление ( по дальностям ), что полет проходил в направлении точки KEDIS - т.е. после взлета и ухода примерно на 4-5 км удаления от места взлета идет вираж направо на новый курс 308 и по трассе 48 до нужной точки.
Ну, исходя из предполагаемого маршрута через акваторию Каспийского моря, выход был, скорее всего через BINOL, а вот по какой схеме, той, что у тебя на картинке, или же ранее постившейся Bredonosc'ем, я сказать не могу.
Ну, исходя из предполагаемого маршрута через акваторию Каспийского моря, выход был, скорее всего через BINOL, а вот по какой схеме, той, что у тебя на картинке, или же ранее постившейся Bredonosc'ем, я сказать не могу.
VVSFalcon> Ну, исходя из предполагаемого маршрута через акваторию Каспийского моря, выход был, скорее всего через BINOL
Пусть здесь будет ( чтобы потом не искать )
Координаты Сочи - N43 27.3 E039 57.7
Координаты NIDEP - N43 23.3 E039 37.5
Расстояние до NIDEP от АЭ - примерно 28 км.
Эшелон на NIDEP - FL70 - 800 м
У меня за 148 сек удаление при нормальном взлете получалось порядка 16 км. С высотой набора за это время - 1440 м. Т.е. явно надо было после закрылков на номинале идти.
Пусть здесь будет ( чтобы потом не искать )
Координаты Сочи - N43 27.3 E039 57.7
Координаты NIDEP - N43 23.3 E039 37.5
Расстояние до NIDEP от АЭ - примерно 28 км.
Эшелон на NIDEP - FL70 - 800 м
У меня за 148 сек удаление при нормальном взлете получалось порядка 16 км. С высотой набора за это время - 1440 м. Т.е. явно надо было после закрылков на номинале идти.
В общем - вот срыв в штопор при уборке закрылков вместо шасси
Условия - затриммирован набор высоты при выпущенных закрылках на скорости примерно 330 км/ч и далее после уборки закрылков я тупо опустил штурвал.
Далее смотрите.
Не нравится мне вот что - примерное место падения
Условия - затриммирован набор высоты при выпущенных закрылках на скорости примерно 330 км/ч и далее после уборки закрылков я тупо опустил штурвал.
Далее смотрите.
Не нравится мне вот что - примерное место падения
Прикреплённые файлы:
yacc> Не нравится мне вот что - примерное место падения
Я позавчера оттуда взлетал. Там по процедуре сперва идет набор высоты в правом вираже, а потом в левом. Поэтому поворот может быть не следствием падения, а следствием управляемого отклонения штурвала.
Я позавчера оттуда взлетал. Там по процедуре сперва идет набор высоты в правом вираже, а потом в левом. Поэтому поворот может быть не следствием падения, а следствием управляемого отклонения штурвала.

101> Поэтому поворот может быть не следствием падения, а следствием управляемого отклонения штурвала.
Это смоделирован совсем уж "блондинистый" случай - бросить штурвал. Подобное будет и если убрать закрылки на 120 после шасси и бросить штурвал - как мне кажется - поэтому прогоню еще несколько моделей управления. В том числе и ручную перекладку стабилизатора.
Это смоделирован совсем уж "блондинистый" случай - бросить штурвал. Подобное будет и если убрать закрылки на 120 после шасси и бросить штурвал - как мне кажется - поэтому прогоню еще несколько моделей управления. В том числе и ручную перекладку стабилизатора.
VVSFalcon>Кроме того, я знаю как оно устроено у этой модели, сам делал, и запуск, и гидравлику, и электрику, и топливную систему (все нестандартные). И автопилот (тушкиных режимов нет в симе), и логику его работы И флайтмодель, и динамическую правку оной, для большего соответствия реалу. И много чего ещё. Например Ту-134
И откель ты такой умный?
И флайтмодель, и динамическую правку оной, для большего соответствия реалу. И много чего ещё. Например Ту-134 И откель ты такой умный?

TEvg-2> И откель ты такой умный?
Если смотреть в корень и отвечать ребром по существу поставленного вопроса, то, таки да, оттуда (откуда и ты).
Если смотреть в корень и отвечать ребром по существу поставленного вопроса, то, таки да, оттуда (откуда и ты).
Реклама Google — средство выживания форумов :)
VVSFalcon> Если смотреть в корень и отвечать ребром по существу поставленного вопроса, то, таки да, оттуда.
Когда ты оттуда вылез, ты не умел делать модели для флайтгеар. И не имел глубоких познаний по физике/аэродинамике Ту-154 и его систем.
Колись, где ума набрался?
Когда ты оттуда вылез, ты не умел делать модели для флайтгеар. И не имел глубоких познаний по физике/аэродинамике Ту-154 и его систем.
Колись, где ума набрался?
Copyright © Balancer 1997..2023
Создано 10.01.2017
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 10.01.2017
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}