-
![[image]](https://www.balancer.ru/cache/sites/ua/or/org/sokol/i/goods/3380/128x128-crop/3380518.jpg)
Обсуждение испытаний и пусков ракет
обсуждение всего, что связано с испытаниями двигателей и пусками ракет, всевозможные особенности полета, съемки, визуальные эффекты и прочееТеги:
 Xan
Xan

Тема: Обсуждение испытаний и пусков ракет
А не Крым и пуканы.
А не Крым и пуканы.


 инфо
инфо инструменты
инструменты apakhom
apakhom

apakhom
втянувшийся
Xan> Тема: Обсуждение испытаний и пусков ракет
Xan> А не Крым и пуканы.
Все же хорошо, что есть "старший брат"")
Тем не менее, тема использования акселерометра очень интересна. И я, так понимаю, Александр продвинулся в ней дальше всех...
У меня запусков с акселерометрами было несколько и лишь в одном случае данные о высоте по нему и по барометру совпали. В остальных - почти одинаковая картина, когда "аксельная линия высоты" идет намного выше и, что более важно для определения апогея, значительно дальше (по времени), чем высота по барометру.
Например, два простых старта совсем игрушечной РП-18.
Там летал другой экземпляр MFR (к сожалению, совсем улетевший позднее).
Уж больно расхождения значительны. Может есть еще какие-нибудь мысли по этому поводу?
Xan> А не Крым и пуканы.
Все же хорошо, что есть "старший брат"
")
Тем не менее, тема использования акселерометра очень интересна. И я, так понимаю, Александр продвинулся в ней дальше всех...
У меня запусков с акселерометрами было несколько и лишь в одном случае данные о высоте по нему и по барометру совпали. В остальных - почти одинаковая картина, когда "аксельная линия высоты" идет намного выше и, что более важно для определения апогея, значительно дальше (по времени), чем высота по барометру.
Например, два простых старта совсем игрушечной РП-18.
Там летал другой экземпляр MFR (к сожалению, совсем улетевший позднее).
Уж больно расхождения значительны. Может есть еще какие-нибудь мысли по этому поводу?



apakhom> Тем не менее, тема использования акселерометра очень интересна. И я, так понимаю, Александр продвинулся в ней дальше всех...
У меня и барометры были, но мне не понравилось и их ограниченность и их неточность на больших высотах и то, что любое дуновение ветра и может быть такое...
Нужна электроника, которая сможет надёжно и безопасно управлять полётом многоступенчатых ракет.
Это означает, что она должна уметь самостоятельно определять скорость для запуска последующих ступеней, моменты их разделения и собственно производить запуск двигателей, помимо спасения головной части. Т.е. двигатели подключены к бортовой электронике, а не к пульту ПУСК. Двигатели, которые могут иметь массу в десятки кг! А тут ветерок дунул, как не так, а ты рядом стоишь и ...
А тут ветерок дунул, как не так, а ты рядом стоишь и ... 
apakhom> Уж больно расхождения значительны. Может есть еще какие-нибудь мысли по этому поводу?
1. Нет смысла в случайности искать зависимости. Может быть и в +, а может быть и в -.
2. Ещё я всё-таки заметил, что платы ты не фиксируешь жестко в корпусе, т.е. в полёте при перегрузках они могут наклоняться, и это будет вносить неопределимую погрешность в показания акселерометра для подобного алгоритма.
3. Для ракет с низкой тяговооруженностью и летящими под углом к горизонту максимум высоты по акселерометру будет соответствовать минимуму скорости и смещен по времени за апогей высоты. Для спасения ракеты - это даже лучше, для точности определения высоты не очень. А вот на больших мощностях и высотах полёта акселерометр будет лучше барометра в любом случае.
И да, я сейчас уже понемногу собираю новую бортовую электронику на одноосевом датчике апогея. Уже написал базовый алгоритм его работы и протестировал его в собственном симуляторе. Сейчас закупил нормальную бортовую камеру и собрал её для тестов пока на стенде. Т.е. следующее испытание будет с локальной камерой! А также полный комплект плат с микроконтроллерами и другими датчиками BMP180, BMP280, MPU6050, MPU6250, флешки, картслоты, пищалки, силовые ключи, инструментальные усилители и тензорезисторы. Буду всё же делать свой акселерометр, так как на желаемый диапазон измерений (50...100)G ничего по адекватной цене найти не смог из готового. Поэтому такой датчик будет полной аналогией стендовым тензодатчикам, где сейчас так же тестирую общий алгоритм работы программы и рисую плату, которая будет всё это вместе сопрягать в единую модульную сборку. Должно получиться что-то типа ардуино+самопал. Зимой хочу сделать пробную сборку головной части со всей электроникой и тестировать её на имитации полёта - запускать с резинки для финальной отработки алгоритма. Соответствующая 3Д модель для 3Д печати уже почти готова...
И тут тоже висит вопрос о калибровке такого аналогового акселерометра.
Делать крутилку или сравнивать его показания в допустимом диапазоне с показаниями, например MPU6250 прямо в полёте...
У меня и барометры были, но мне не понравилось и их ограниченность и их неточность на больших высотах и то, что любое дуновение ветра и может быть такое...
Нужна электроника, которая сможет надёжно и безопасно управлять полётом многоступенчатых ракет.
Это означает, что она должна уметь самостоятельно определять скорость для запуска последующих ступеней, моменты их разделения и собственно производить запуск двигателей, помимо спасения головной части. Т.е. двигатели подключены к бортовой электронике, а не к пульту ПУСК. Двигатели, которые могут иметь массу в десятки кг!
 А тут ветерок дунул, как не так, а ты рядом стоишь и ...
А тут ветерок дунул, как не так, а ты рядом стоишь и ... 
apakhom> Уж больно расхождения значительны. Может есть еще какие-нибудь мысли по этому поводу?
1. Нет смысла в случайности искать зависимости. Может быть и в +, а может быть и в -.
2. Ещё я всё-таки заметил, что платы ты не фиксируешь жестко в корпусе, т.е. в полёте при перегрузках они могут наклоняться, и это будет вносить неопределимую погрешность в показания акселерометра для подобного алгоритма.
3. Для ракет с низкой тяговооруженностью и летящими под углом к горизонту максимум высоты по акселерометру будет соответствовать минимуму скорости и смещен по времени за апогей высоты. Для спасения ракеты - это даже лучше, для точности определения высоты не очень. А вот на больших мощностях и высотах полёта акселерометр будет лучше барометра в любом случае.
И да, я сейчас уже понемногу собираю новую бортовую электронику на одноосевом датчике апогея. Уже написал базовый алгоритм его работы и протестировал его в собственном симуляторе. Сейчас закупил нормальную бортовую камеру и собрал её для тестов пока на стенде. Т.е. следующее испытание будет с локальной камерой! А также полный комплект плат с микроконтроллерами и другими датчиками BMP180, BMP280, MPU6050, MPU6250, флешки, картслоты, пищалки, силовые ключи, инструментальные усилители и тензорезисторы. Буду всё же делать свой акселерометр, так как на желаемый диапазон измерений (50...100)G ничего по адекватной цене найти не смог из готового. Поэтому такой датчик будет полной аналогией стендовым тензодатчикам, где сейчас так же тестирую общий алгоритм работы программы и рисую плату, которая будет всё это вместе сопрягать в единую модульную сборку. Должно получиться что-то типа ардуино+самопал. Зимой хочу сделать пробную сборку головной части со всей электроникой и тестировать её на имитации полёта - запускать с резинки для финальной отработки алгоритма. Соответствующая 3Д модель для 3Д печати уже почти готова...
И тут тоже висит вопрос о калибровке такого аналогового акселерометра.

Делать крутилку или сравнивать его показания в допустимом диапазоне с показаниями, например MPU6250 прямо в полёте...


Tayfur
втянувшийся
Mihail66> Отлично! Нужно еще хорошо сбалансировать массы чтобы минимизировать радиальное биение. Иначе можно такого черта накалибровать.
На центрифугу нужно поместить часть корпуса от ракеты с акселерометром, барометром и боковой дырдочкой. Тогда можно будет откалибровать и барометр по скорости/давлению. А ещё добавить фронтовой барометр и попробовать откалибровать по скорости.
На центрифугу нужно поместить часть корпуса от ракеты с акселерометром, барометром и боковой дырдочкой. Тогда можно будет откалибровать и барометр по скорости/давлению. А ещё добавить фронтовой барометр и попробовать откалибровать по скорости.


Tayfur> ...Тогда можно будет откалибровать и барометр по скорости/давлению.
А это еще зачем? Или это типа проверить как он на ветер реагирует?
А это еще зачем? Или это типа проверить как он на ветер реагирует?
Tayfur
втянувшийся
Tayfur>> ...Тогда можно будет откалибровать и барометр по скорости/давлению.
Mihail66> А это еще зачем? Или это типа проверить как он на ветер реагирует?
Ага.
Mihail66> А это еще зачем? Или это типа проверить как он на ветер реагирует?
Ага.
Tayfur> Ага.
Мне кажется, что ничего таким образом проверить не получится. Условия будут не те что в реальности.
Мне кажется, что ничего таким образом проверить не получится. Условия будут не те что в реальности.
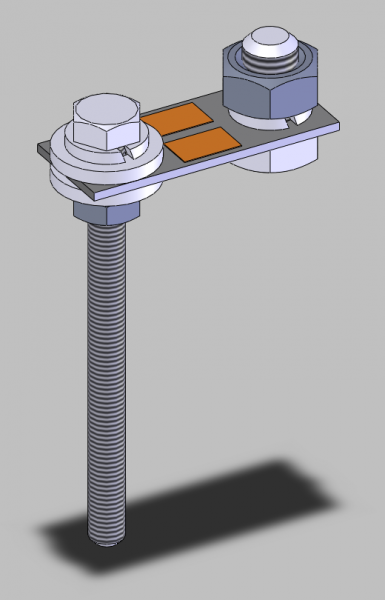
SashaMaks> И тут тоже висит вопрос о калибровке такого аналогового акселерометра.
SashaMaks> http://files.balancer.ru/.../08-6554441-samodelnyj-akselerometr.png
А почему бы не использовать готовый заводской весоизмерительный датчик? Они очень маленькие бывают.
SashaMaks> http://files.balancer.ru/.../08-6554441-samodelnyj-akselerometr.png
А почему бы не использовать готовый заводской весоизмерительный датчик? Они очень маленькие бывают.
Mihail66> А почему бы не использовать готовый заводской весоизмерительный датчик? Они очень маленькие бывают.
Например?
Например?
SashaMaks> Например?
Да любой балочный датчик для ювелирных весов.
Мне почему то кажется, что у твоей конструкции будет присутствовать нелинейность.
Да любой балочный датчик для ювелирных весов.
Мне почему то кажется, что у твоей конструкции будет присутствовать нелинейность.
SashaMaks>> Например?
Mihail66> Да любой балочный датчик для ювелирных весов.
А ссылку можно посмотреть?
Mihail66> Мне почему то кажется, что у твоей конструкции будет присутствовать нелинейность.
Чтобы не казалось, надо считать...
Mihail66> Да любой балочный датчик для ювелирных весов.
А ссылку можно посмотреть?
Mihail66> Мне почему то кажется, что у твоей конструкции будет присутствовать нелинейность.
Чтобы не казалось, надо считать...
SashaMaks> А ссылку можно посмотреть?
Вот например первый который открылся по запросу "тензодатчик 100г".

SashaMaks> Чтобы не казалось, надо считать...
А что там можно насчитать?
Тут надо не считать, а экспериментально проверять, как твой болт на груз реагирует. Возможно потребуется нелинейная калибровка. Дальше сам понимаешь, чем больше будет отрезков, тем точнее результат измерения.
Вот например первый который открылся по запросу "тензодатчик 100г".
149.32руб. 6% СКИДКА|100 г небольшой диапазон высокоточный датчик взвешивания, датчик нагрузки, датчик веса|sensor clamp|sensored motorsensor test | АлиЭкспресс
Покупай умнее, живи веселее! Aliexpress.com // aliexpress.ruSashaMaks> Чтобы не казалось, надо считать...
А что там можно насчитать?
Тут надо не считать, а экспериментально проверять, как твой болт на груз реагирует. Возможно потребуется нелинейная калибровка. Дальше сам понимаешь, чем больше будет отрезков, тем точнее результат измерения.
Это сообщение редактировалось 14.10.2020 в 20:13
SashaMaks>> А ссылку можно посмотреть?
Mihail66> Вот например первый который открылся по запросу "тензодатчик 100г".
У этого консоль великовата 47мм, сейчас 30мм и я наверное сделаю ещё уже...
Mihail66> А что там можно насчитать?
Перемещения балки от нагрузки.
Mihail66> Тут надо не считать, а экспериментально проверять, как твой болт на груз реагирует.
Делали много раз ещё в институте.
Mihail66> Возможно потребуется нелинейная калибровка.
Не потребуется.
Mihail66> Дальше сам понимаешь, чем больше будет отрезков, тем точнее результат измерения.
Не больше, чем для линейности. Линейность ещё тоже надо доказывать на калибровке, так как это калибровка, а не элемент веры.
Mihail66> Вот например первый который открылся по запросу "тензодатчик 100г".
У этого консоль великовата 47мм, сейчас 30мм и я наверное сделаю ещё уже...
Mihail66> А что там можно насчитать?
Перемещения балки от нагрузки.
Mihail66> Тут надо не считать, а экспериментально проверять, как твой болт на груз реагирует.
Делали много раз ещё в институте.
Mihail66> Возможно потребуется нелинейная калибровка.
Не потребуется.
Mihail66> Дальше сам понимаешь, чем больше будет отрезков, тем точнее результат измерения.
Не больше, чем для линейности. Линейность ещё тоже надо доказывать на калибровке, так как это калибровка, а не элемент веры.
SashaMaks> У этого консоль великовата 47мм, сейчас 30мм и я наверное сделаю ещё уже...
Иначе в корпус ракеты не встанет?
SashaMaks> Перемещения балки от нагрузки.
Придется учитывать, что твой грузик будет стремиться крениться на бок.
Иначе в корпус ракеты не встанет?
SashaMaks> Перемещения балки от нагрузки.
Придется учитывать, что твой грузик будет стремиться крениться на бок.
Mihail66> Иначе в корпус ракеты не встанет?
Чтобы ЦМ груза был ближе к оси ракеты, а там половина диаметра корпуса.
Mihail66> Придется учитывать, что твой грузик будет стремиться крениться на бок.
Придется ... ты вот прямо точно это знаешь. А балка по твоей ссылке, значит, не будет стремиться крениться на бок?
Щас, начнеться...
Чтобы ЦМ груза был ближе к оси ракеты, а там половина диаметра корпуса.
Mihail66> Придется учитывать, что твой грузик будет стремиться крениться на бок.
Придется ... ты вот прямо точно это знаешь. А балка по твоей ссылке, значит, не будет стремиться крениться на бок?
Щас, начнеться...

SashaMaks> ... А балка по твоей ссылке, значит, не будет стремиться крениться на бок?
Балка по ссылке сделана с умом, она минимизирует крен и стремится сохранить направление вектора нагружения.
Можно взять вот такой датчик на 5 кг, нагрузить посильней. У него размеры 26*26мм, и точка приложения нагрузки по центру.
Балка по ссылке сделана с умом, она минимизирует крен и стремится сохранить направление вектора нагружения.
Можно взять вот такой датчик на 5 кг, нагрузить посильней. У него размеры 26*26мм, и точка приложения нагрузки по центру.

Это сообщение редактировалось 14.10.2020 в 21:12
Mihail66> Балка по ссылке сделана с умом, она минимизирует крен и стремится сохранить направление вектора нагружения.
Нет, это помогает только от неточности приложения силы к опорной площадке, чтобы момент был одинаковый, но и то погрешность механическая составляет (1..5)%.
От крена это никак не спасает.
Mihail66> Можно взять вот такой датчик на 5 кг, нагрузить посильней. У него размеры 26*26мм, и точка приложения нагрузки по центру.
1. Он слишком жесткий, потребуется очень тяжелый грузик для него.
2. Здесь тоже будет крен.
Нет, это помогает только от неточности приложения силы к опорной площадке, чтобы момент был одинаковый, но и то погрешность механическая составляет (1..5)%.
От крена это никак не спасает.
Mihail66> Можно взять вот такой датчик на 5 кг, нагрузить посильней. У него размеры 26*26мм, и точка приложения нагрузки по центру.
1. Он слишком жесткий, потребуется очень тяжелый грузик для него.
2. Здесь тоже будет крен.
SashaMaks> От крена это никак не спасает.
Ну, приплыли!
Это как же?
SashaMaks> 1. Он слишком жесткий, потребуется очень тяжелый грузик для него.
Если на весь диапазон, то всего 25 грамм для 200g.
Ну, приплыли!
Это как же?
SashaMaks> 1. Он слишком жесткий, потребуется очень тяжелый грузик для него.
Если на весь диапазон, то всего 25 грамм для 200g.
SashaMaks>> От крена это никак не спасает.
Mihail66> Ну, приплыли!
Mihail66> Это как же?
Это типичная консольная балка, см. раздел сопромата по этой теме.
Mihail66> Если на весь диапазон, то всего 25 грамм для 200g.
Что-то сомневаюсь, что при такой же геометрии УЭ у него будет меньше жесткость.
А так надо 50G, а это 100г.
Mihail66> Ну, приплыли!
Mihail66> Это как же?
Это типичная консольная балка, см. раздел сопромата по этой теме.
Mihail66> Если на весь диапазон, то всего 25 грамм для 200g.
Что-то сомневаюсь, что при такой же геометрии УЭ у него будет меньше жесткость.
А так надо 50G, а это 100г.
Прикреплённые файлы:

SashaMaks> Это "типичная консольная балка", см. раздел сопромата по этой теме.
Ну это ежу понятно, что где то будет растягиваться. По крайней мере в такой конструкции это менее выражено, чем при использовании "типичной консольной балки" как в твоей конструкции.
И покажи мне в сопромате эту "типичную" балку с именно такой геометрий.
SashaMaks> А так надо 50G, а это 100г.
А ты в 50g уложишься? А хочется еще и запас иметь.
Ну это ежу понятно, что где то будет растягиваться. По крайней мере в такой конструкции это менее выражено, чем при использовании "типичной консольной балки" как в твоей конструкции.
И покажи мне в сопромате эту "типичную" балку с именно такой геометрий.
SashaMaks> А так надо 50G, а это 100г.
А ты в 50g уложишься? А хочется еще и запас иметь.
Mihail66> По крайней мере в такой конструкции это менее выражено, чем при использовании "типичной консольной балки" как в твоей конструкции.
Ну конечно, моя конструкция - это всегда плохо
Но ты хотя бы раз потрудись свои слова делом подтвердить! Попробуй доказать это! Давай! Покажи это "менее выражено" в железе.
Mihail66> И покажи мне в сопромате эту "типичную" балку с именно такой геометрий.
Нет, сопромат нужен в данном случае для тебя, чтобы иметь представление о перемещениях не только качественное, но и количественное.
SashaMaks>> А так надо 50G, а это 100г.
Mihail66> А ты в 50g уложишься? А хочется еще и запас иметь.
Можеть быть ты пропустил или не прочитал...
SashaMaks> Что-то сомневаюсь, что при такой же геометрии УЭ у него будет меньше жесткость.
Там обман.
Ну конечно, моя конструкция - это всегда плохо

Но ты хотя бы раз потрудись свои слова делом подтвердить! Попробуй доказать это! Давай! Покажи это "менее выражено" в железе.
Mihail66> И покажи мне в сопромате эту "типичную" балку с именно такой геометрий.
Нет, сопромат нужен в данном случае для тебя, чтобы иметь представление о перемещениях не только качественное, но и количественное.
SashaMaks>> А так надо 50G, а это 100г.
Mihail66> А ты в 50g уложишься? А хочется еще и запас иметь.
Можеть быть ты пропустил или не прочитал...
SashaMaks> Что-то сомневаюсь, что при такой же геометрии УЭ у него будет меньше жесткость.
Там обман.
SashaMaks> Ну конечно, моя конструкция - это всегда плохо
Задолбал.
Все у тебя офигенно!
SashaMaks> Но ты хотя бы раз потрудись свои слова делом подтвердить! Попробуй доказать это! Давай! Покажи это "менее выражено" в железе.
Ты же сам только что это показал на своей картинке.
Задолбал.
Все у тебя офигенно!
SashaMaks> Но ты хотя бы раз потрудись свои слова делом подтвердить! Попробуй доказать это! Давай! Покажи это "менее выражено" в железе.
Ты же сам только что это показал на своей картинке.
Это сообщение редактировалось 14.10.2020 в 23:39
 pinko
pinko

MMA2202KEG ±50g 4$ щт.

US $2.45 |New&origina MMA2202KEG|Replacement Parts & Accessories| - AliExpress
Smarter Shopping, Better Living! Aliexpress.com // www.aliexpress.com
SashaMaks>> 1. Он слишком жесткий, потребуется очень тяжелый грузик для него.
Mihail66> Если на весь диапазон, то всего 25 грамм для 200g.
SashaMaks>> А так надо 50G, а это 100г.
Mihail66> А ты в 50g уложишься? А хочется еще и запас иметь.
SashaMaks> Можеть быть ты пропустил или не прочитал...
SashaMaks>> Что-то сомневаюсь, что при такой же геометрии УЭ у него будет меньше жесткость.
SashaMaks> Там обман.
pinko> MMA2202KEG ±50g 4$ щт.
Для порядка.
УЭ на 40кГс.
Перегрузка рабочая в первом приближении (50±10)G, с запасом 100G
Масса груза 400г.
Надеюсь очередная словесная биллетристика будет закончена.
SashaMaks>> Ну конечно, моя конструкция - это всегда плохо
Mihail66> Задолбал.
Mihail66> Все у тебя офигенно!
Я тебя не "задолбал" (Обсуждение испытаний и пусков ракет [Mihail66#14.10.20 18:09]!
У меня не "Все офигенно", данный УЭ не обладает криволинейностью, ухудшающей потребную точность измерения. Да и это не проблема, если, конечно, не калибровать его по вашей методике.
Mihail66> Если на весь диапазон, то всего 25 грамм для 200g.
SashaMaks>> А так надо 50G, а это 100г.
Mihail66> А ты в 50g уложишься? А хочется еще и запас иметь.
SashaMaks> Можеть быть ты пропустил или не прочитал...
SashaMaks>> Что-то сомневаюсь, что при такой же геометрии УЭ у него будет меньше жесткость.
SashaMaks> Там обман.
pinko> MMA2202KEG ±50g 4$ щт.
Для порядка.
УЭ на 40кГс.
Перегрузка рабочая в первом приближении (50±10)G, с запасом 100G
Масса груза 400г.
Надеюсь очередная словесная биллетристика будет закончена.
SashaMaks>> Ну конечно, моя конструкция - это всегда плохо
Mihail66> Задолбал.
Mihail66> Все у тебя офигенно!
Я тебя не "задолбал" (Обсуждение испытаний и пусков ракет [Mihail66#14.10.20 18:09]!
У меня не "Все офигенно", данный УЭ не обладает криволинейностью, ухудшающей потребную точность измерения. Да и это не проблема, если, конечно, не калибровать его по вашей методике.
SashaMaks> Для порядка.
SashaMaks> УЭ на 40кГс.
SashaMaks> Перегрузка рабочая в первом приближении (50±10)G, с запасом 100G
SashaMaks> Масса груза 400г.
SashaMaks> Надеюсь очередная словесная биллетристика будет закончена.
Это к чему ты написал? Я смысла не уловил.
SashaMaks> Я тебя не "задолбал" (Обсуждение испытаний и пусков ракет [Mihail66#14.10.20 18:09]!
Да ты уже всех задолбал, что у тебя все офигенно, а мы тут вокруг тебя в г**не бултыхаемся.
SashaMaks> УЭ на 40кГс.
SashaMaks> Перегрузка рабочая в первом приближении (50±10)G, с запасом 100G
SashaMaks> Масса груза 400г.
SashaMaks> Надеюсь очередная словесная биллетристика будет закончена.
Это к чему ты написал? Я смысла не уловил.
SashaMaks> Я тебя не "задолбал" (Обсуждение испытаний и пусков ракет [Mihail66#14.10.20 18:09]!
Да ты уже всех задолбал, что у тебя все офигенно, а мы тут вокруг тебя в г**не бултыхаемся.
Copyright © Balancer 1997..2022
Создано 22.07.2014
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 22.07.2014
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}