 MartKot
MartKot
 инфо
инфо инструменты
инструменты Non-conformist
Non-conformist





 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/mi/mikroe/img/development-tools/pic/easypic_v7/128x128-crop/thumb_easypic_v7.png)
Кобра III
Теги:

Non-conformist> Ток ДЕСЯТИ ПОСЛЕДОВАТЕЛЬНО ВКЛЮЧЕННЫХ D-элементов...
Закон Ома для полной цепи:Для одного элемента: I=U/(r + R);
Для 10 элементов I(10)=10U/(10r + R). Допустим ток КЗ (R=0) для одного элемента 10А, тогда r=0,15 Ом (r-внутреннее сопротивление элемента), получаем тоже самое для 10 элементов 10А=15В/(1,5 Ом + R), если R=0 (КЗ)") Далее... Пусть R=0,4 Ом, тогда для одного элемента I=1,5/(0,15+0,4)=2,72А. Для 10R=4 Ом и 10 элементов получаем I(10)=15/(10*0,15 + 4)=2,72А
Далее... Пусть R=0,4 Ом, тогда для одного элемента I=1,5/(0,15+0,4)=2,72А. Для 10R=4 Ом и 10 элементов получаем I(10)=15/(10*0,15 + 4)=2,72А
Закон Ома для полной цепи:Для одного элемента: I=U/(r + R);
Для 10 элементов I(10)=10U/(10r + R). Допустим ток КЗ (R=0) для одного элемента 10А, тогда r=0,15 Ом (r-внутреннее сопротивление элемента), получаем тоже самое для 10 элементов 10А=15В/(1,5 Ом + R), если R=0 (КЗ)
Далее... Пусть R=0,4 Ом, тогда для одного элемента I=1,5/(0,15+0,4)=2,72А. Для 10R=4 Ом и 10 элементов получаем I(10)=15/(10*0,15 + 4)=2,72А


Это сообщение редактировалось 17.01.2009 в 17:18

Non-conformist>> Ток ДЕСЯТИ ПОСЛЕДОВАТЕЛЬНО ВКЛЮЧЕННЫХ D-элементов...
MartKot> получаем тоже самое
А, т.е. ток получается "тот же самый" - что для одного элемента, что для n элементов, и рост суммарного внутреннего сопротивления элементов батареи не сказывается на ее токе при увеличении количества последовательно соединенных элементов (прирост напряжения компенсирует прирост внутреннего сопротивления)?
MartKot> получаем тоже самое
А, т.е. ток получается "тот же самый" - что для одного элемента, что для n элементов, и рост суммарного внутреннего сопротивления элементов батареи не сказывается на ее токе при увеличении количества последовательно соединенных элементов (прирост напряжения компенсирует прирост внутреннего сопротивления)?
Что то вы, ребята, загибаете.
Ток 10А на 0,4Ома может дать только источник с ЭДС не менее 4В.
Это не считая внутреннего сопротивления.
Подходят только литий ионные, да и то не совсем, но вы то обсуждали другие.
На 3-4 Ома и 10А не будет варианта кроме 9-10 литий ионных банок.
Но это дорого и сложно.
Кроме того 400ватт нагрузка - куда это?
Ток 10А на 0,4Ома может дать только источник с ЭДС не менее 4В.
Это не считая внутреннего сопротивления.
Подходят только литий ионные, да и то не совсем, но вы то обсуждали другие.
На 3-4 Ома и 10А не будет варианта кроме 9-10 литий ионных банок.
Но это дорого и сложно.
Кроме того 400ватт нагрузка - куда это?

Non-conformist> А, т.е. ток получается "тот же самый"...
Да, в идеале должно быть так.
Это же просто пример 10А, взято с потолка и то для КЗ, для прикидочного расчёта r(вн). Причём, без учёта вн. сопр. амперметра и проводов
ГАЛЬВАНИЧЕСКИЕ ИСТОЧНИКИ ТОКА ОДНОРАЗОВОГО ДЕЙСТВИЯ
Раз пошла такя пьнка:Серия профессиональных элементов питания Профессиональные элементы питания PROCELL
Тестер для контроля энергоемкости элементов питания Тестер для контроля энергоемкости элементов питания / Железо / 1006000
ИЗМЕРЕНИЕ ПАРАМЕТРОВ АККУМУЛЯТОРОВ Журнал ╚Радио╩ | Избранное | 2001 | Сентябрь | Измерение параметров аккумуляторов
Внутреннее сопротивление ХИТ и его измерение МЕГАРОН - разработка и производство радиотехники в Санкт-Петербурге, блоки питания, автоматические зарядные устройства, стабилизаторы - Внутреннее сопротивление ХИТ и его измерение
В.С.Лаврус. Батарейки и аккумуляторы http://lib.ru/NTL/rel01_w6.txt
Да, в идеале должно быть так.
Это же просто пример
10А, взято с потолка и то для КЗ, для прикидочного расчёта r(вн). Причём, без учёта вн. сопр. амперметра и проводов ГАЛЬВАНИЧЕСКИЕ ИСТОЧНИКИ ТОКА ОДНОРАЗОВОГО ДЕЙСТВИЯ
Раз пошла такя пьнка:Серия профессиональных элементов питания Профессиональные элементы питания PROCELL
Тестер для контроля энергоемкости элементов питания Тестер для контроля энергоемкости элементов питания / Железо / 1006000
ИЗМЕРЕНИЕ ПАРАМЕТРОВ АККУМУЛЯТОРОВ Журнал ╚Радио╩ | Избранное | 2001 | Сентябрь | Измерение параметров аккумуляторов
Внутреннее сопротивление ХИТ и его измерение МЕГАРОН - разработка и производство радиотехники в Санкт-Петербурге, блоки питания, автоматические зарядные устройства, стабилизаторы - Внутреннее сопротивление ХИТ и его измерение
В.С.Лаврус. Батарейки и аккумуляторы http://lib.ru/NTL/rel01_w6.txt
Это сообщение редактировалось 18.01.2009 в 02:54
Понятно. А вообще одна из основных задач - СНИЗИТЬ себестоимость изделия. Если подойдут солевые элементы, то, конечно, предпочтение будет отдано им, поскольку они в четыре-пять раз дешевле щелочных. Стоимость солевой батареи из десяти штук по местным ценам получается около 20 грн, а щелочной - около 100 грн. Причем масса особой роли имхо не играет, поскольку корма вроде бы получается тяжеловатой, и в голову нужно будет положить соответствующий груз, чтобы ЦТ занял приемлемое положение.
Исходя из перечисленных соображений я и хочу определиться, какие элементы покупать. У меня есть мощный блок питания на 14 В, и для того, чтобы смоделировать на нем оба варианта, мне нужны примерные МОЩНОСТИ, которые обеспечивают эти две разновидности элементов питания. Можно, конечно, купить и попробовать и то и другое, но пока я хочу навести предварительные справки. Если кто из участников имел опыт СИЛОВОЙ эксплуатации подобных батарей - прошу в студию.
Исходя из перечисленных соображений я и хочу определиться, какие элементы покупать. У меня есть мощный блок питания на 14 В, и для того, чтобы смоделировать на нем оба варианта, мне нужны примерные МОЩНОСТИ, которые обеспечивают эти две разновидности элементов питания. Можно, конечно, купить и попробовать и то и другое, но пока я хочу навести предварительные справки. Если кто из участников имел опыт СИЛОВОЙ эксплуатации подобных батарей - прошу в студию.
А какая мощность нужна? Или это пока неизвестно?

Serge77> А какая мощность нужна? Или это пока неизвестно?
Ток потребления я надеюсь определить в ходе статического теста. Замерить суммарный ток потребления двух каналов при диаметральном перекладывании ВТ под номинальной нагрузкой. Там несколько случаев по механике - в зависимости от желаемой траектории КС, но это нюансы. В данном случае меня интересует МАКСИМАЛЬНЫЙ ток потребления.
Видимо, это будет импульс тока довольно сложной формы, наполовину состоящий из помех щеточных аппаратов, по среднему значению которого, надеюсь, можно будет сделать какие-то прикидки. Рассчитываю, что эту картинку можно будет посмотреть моим С1-77 в режиме ждущей развертки...
Ток потребления я надеюсь определить в ходе статического теста. Замерить суммарный ток потребления двух каналов при диаметральном перекладывании ВТ под номинальной нагрузкой. Там несколько случаев по механике - в зависимости от желаемой траектории КС, но это нюансы. В данном случае меня интересует МАКСИМАЛЬНЫЙ ток потребления.
Видимо, это будет импульс тока довольно сложной формы, наполовину состоящий из помех щеточных аппаратов, по среднему значению которого, надеюсь, можно будет сделать какие-то прикидки. Рассчитываю, что эту картинку можно будет посмотреть моим С1-77 в режиме ждущей развертки...

Энкодер из мыши применение в валкодере - много фоток - подробно

termostat> Энкодер из мыши применение в валкодере - много фоток - подробно
Из мышки мог бы получиться неплохой датчик положения ШТОКА активатора, "если бы не". Сильно надеюсь, что четыре разваленных фотодиода на торце силового поводка справятся с этой задачей гораздо лучше мышек и переменных резисторов.
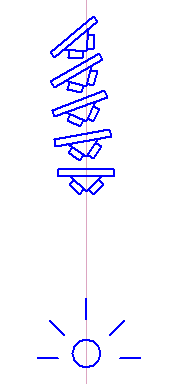
Термостат, как ты думаешь, можно ли как-то оценить состоятельность этой идеи, не собирая схему с МК? Тут получается интересная траектория торца поводка относительно неподвижного излучателя. Шарнир на заглушке КС (не показан) перемещается по окружности, а торец поводка, противоположный торец которого укреплен в этом шарнире, передвигается примерно так, как изображено на рисунке ниже.
Картина напоминает взаимодействие частей кулисного механизма; показаны пять позиций одной пары разваленных фотодиодов, укрепленных на торце поводка: одновременно изменяется дистанция до излучателя и угол поворота. Это дает надежду, что дифсигнал с изображенной пары будет в значительной мере линеаризован именно за счет траектории перемещения.
Проще всего, наверное, будет собрать все в реале, сделать схему как в "Гелиостате", и записать зависимость ШИМ от угла наклона через звуковуху на комп.
Из мышки мог бы получиться неплохой датчик положения ШТОКА активатора, "если бы не". Сильно надеюсь, что четыре разваленных фотодиода на торце силового поводка справятся с этой задачей гораздо лучше мышек и переменных резисторов.
Термостат, как ты думаешь, можно ли как-то оценить состоятельность этой идеи, не собирая схему с МК? Тут получается интересная траектория торца поводка относительно неподвижного излучателя. Шарнир на заглушке КС (не показан) перемещается по окружности, а торец поводка, противоположный торец которого укреплен в этом шарнире, передвигается примерно так, как изображено на рисунке ниже.
Картина напоминает взаимодействие частей кулисного механизма; показаны пять позиций одной пары разваленных фотодиодов, укрепленных на торце поводка: одновременно изменяется дистанция до излучателя и угол поворота. Это дает надежду, что дифсигнал с изображенной пары будет в значительной мере линеаризован именно за счет траектории перемещения.
Проще всего, наверное, будет собрать все в реале, сделать схему как в "Гелиостате", и записать зависимость ШИМ от угла наклона через звуковуху на комп.
Прикреплённые файлы:
Non-conformist> записать зависимость ШИМ от угла наклона через звуковуху на комп.
Точно ! Я правда щас весь в работе и в описание не "въеду".
Точно ! Я правда щас весь в работе и в описание не "въеду".
termostat> Точно! Я правда щас весь в работе и в описание не "въеду".
Не бери в голову, работай спокойно и плодовито. Главное - яйценоскость.
***
Такой фокус: взять установку пальцами за "рога" и вручную описать ими некую фигуру высшего пилотажа - например "восьмерку" (лазером на потолке). МК при этом пишет данные с датчика положения; нажимаем кнопочку - МК в точности воспроизводит записанную траекторию, манипулируя моторами активаторов. С разной скоростью, в т.ч. с максимально возможной; точность оценивается визуально. Будет ли такой эксперимент свидетельствовать о состоятельности датчика положения?
Не бери в голову, работай спокойно и плодовито. Главное - яйценоскость.
***
Такой фокус: взять установку пальцами за "рога" и вручную описать ими некую фигуру высшего пилотажа - например "восьмерку" (лазером на потолке). МК при этом пишет данные с датчика положения; нажимаем кнопочку - МК в точности воспроизводит записанную траекторию, манипулируя моторами активаторов. С разной скоростью, в т.ч. с максимально возможной; точность оценивается визуально. Будет ли такой эксперимент свидетельствовать о состоятельности датчика положения?
Non-conformist> Такой фокус... Будет ли такой эксперимент свидетельствовать о состоятельности датчика положения?
В первом приближении - да.
Эксперимент полезный.
Излагаю все, как сам представляю.
В состав двухканальной следящей системы входят датчик углового отклонения и астатическая следящая система со своими инерционными звеньями. Точка вычитания: из текущего курса(тангажа) ракеты относительно направления на источник света вычитается угол, вызванный вращением ракеты при отклонении вектора тяги.
Предлагаемый эксперимент суть проверка работы разомкнутой следящей системы при статических воздействиях.
Даже при отсутствии инерционных звеньев в цепи ОС, угол отклонения вектора тяги не будет равен углу возмущения - но 1)будет пропорционален. При медленных возмущениях 2)в пределах линейности датчика эта пропорциональность и будет проверяться.
По мере ускорения возмущений должны проявляться инерционные свойства следящей системы, в том числе и 3)для учета инерционных свойств ракеты.
Например (очень грубо, но все-таки..): отклонил ракету с датчиком на 1 градус - мотор должен отклониться на 5 градусов. Возвращаешь ме-е-едленно - мотор пропорционально возвращается в "соосное" положение. Возвращаешь МГНОВЕННО - мотор не просто возвращается в "соосное" положение, но и "проскакивает ноль" на некоторое время, чтобы ракета перестала вращаться к моменту возврата на "нулевой" курс.
"В динамике" - движения вектора тяги должны быть сложнее, чем угловые отклонения.
В первом приближении - да.
Эксперимент полезный.
Излагаю все, как сам представляю.
В состав двухканальной следящей системы входят датчик углового отклонения и астатическая следящая система со своими инерционными звеньями. Точка вычитания: из текущего курса(тангажа) ракеты относительно направления на источник света вычитается угол, вызванный вращением ракеты при отклонении вектора тяги.
Предлагаемый эксперимент суть проверка работы разомкнутой следящей системы при статических воздействиях.
Даже при отсутствии инерционных звеньев в цепи ОС, угол отклонения вектора тяги не будет равен углу возмущения - но 1)будет пропорционален. При медленных возмущениях 2)в пределах линейности датчика эта пропорциональность и будет проверяться.
По мере ускорения возмущений должны проявляться инерционные свойства следящей системы, в том числе и 3)для учета инерционных свойств ракеты.
Например (очень грубо, но все-таки..): отклонил ракету с датчиком на 1 градус - мотор должен отклониться на 5 градусов. Возвращаешь ме-е-едленно - мотор пропорционально возвращается в "соосное" положение. Возвращаешь МГНОВЕННО - мотор не просто возвращается в "соосное" положение, но и "проскакивает ноль" на некоторое время, чтобы ракета перестала вращаться к моменту возврата на "нулевой" курс.
"В динамике" - движения вектора тяги должны быть сложнее, чем угловые отклонения.
Это сообщение редактировалось 20.01.2009 в 09:11
Ckona, ты уже имхо залезаешь сугубо в дебри ПИД. Не надо торопиться, всему свое время. Тем более что и не получается сильно торопиться, гы. Все эти нюансы (качество работы регулятора) проверяются на перевернутом маятнике - я спрашивал у профессора, так что имхо не надо сильно напрягаться с мысленными экспериментами. Будет стоять маятник - будет стоять и ракета, надо будет только подобрать соответствующие коэффициенты. Он мне дал понять, что когда будет готов объект, он будет готов разговаривать на тему коэффициентов более предметно (решит уравнения и укажет диапазоны коэффициентов).
***
Кажется, нащупал-таки достойную конструкцию датчика положения КС. Силовому поводку даю отставку, судя по всему. Оптопары надо располагать по осям КАРДАНА, и отслеживать плоский поворот двух разнесенных датчиков относительно осветителя. Для компенсации осевых люфтов кардана тоже есть решение...
***
Кажется, нащупал-таки достойную конструкцию датчика положения КС. Силовому поводку даю отставку, судя по всему. Оптопары надо располагать по осям КАРДАНА, и отслеживать плоский поворот двух разнесенных датчиков относительно осветителя. Для компенсации осевых люфтов кардана тоже есть решение...
Мои "ПИД-рассуждения" - все относятся к этой фразе
Non-conformist> ...нажимаем кнопочку - МК в точности воспроизводит записанную траекторию, манипулируя моторами активаторов.
особенно к "максимально возможной скорости".
По поводу датчика положения КС:
по конструктивным соображениям удобнее измерять угол или смещение колец "вверх-вниз" ?
Сразу видно различие: со среднего кольца нужен будет гибкий жгут, от актуаторов все жгуты неподвижные.
Но чем ближе к РД, тем достовернее данные по ориентации ВТ.
Почему исчезла твоя аватара ? Ты побрился или кепку спёрли ?
Non-conformist> ...нажимаем кнопочку - МК в точности воспроизводит записанную траекторию, манипулируя моторами активаторов.
особенно к "максимально возможной скорости".
По поводу датчика положения КС:
по конструктивным соображениям удобнее измерять угол или смещение колец "вверх-вниз" ?
Сразу видно различие: со среднего кольца нужен будет гибкий жгут, от актуаторов все жгуты неподвижные.
Но чем ближе к РД, тем достовернее данные по ориентации ВТ.
Почему исчезла твоя аватара ? Ты побрился или кепку спёрли ?
Ckona> По поводу датчика положения КС: по конструктивным соображениям удобнее измерять угол или смещение колец "вверх-вниз"?
Дело в том, что в системе ВООБЩЕ нет ЧИСТОГО возвратно-поступательного движения. Т.е. оно-то есть (силовой поводок относительно обойм поворотной фермы), но это движение неинформативно - ТОЛЬКО из него одного НЕвозможно вычислить координаты КС в плоскости сечения трубы.
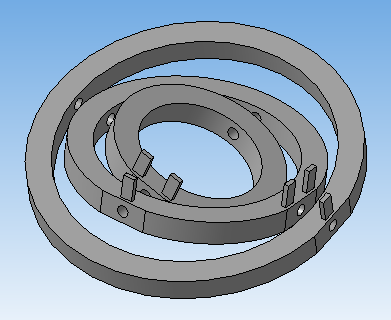
А другие возвратно-поступательные движения неотделимы от угловых перемещений: кольца кардана, КС, поворотная ферма, силовой поводок: двигаясь, они изменяют И свой угол, И координаты в плоскости поперечного сечения. Но информативные УГЛОВЫЕ перемещения МОЖНО отделить от возвратно поступательных, и сделать это проще всего именно на кардане: нужно разместить плоскость разнесенных фотосенсоров в плоскости вращения колец кардана, см. рисунок.
Ckona> Сразу видно различие: со среднего кольца нужен будет гибкий жгут, от актуаторов все жгуты неподвижные. Но чем ближе к РД, тем достовернее данные по ориентации ВТ.
Именно. Недостаток мизерный, преимущество - очевидное.
Ckona> Почему исчезла твоя аватара? Ты побрился или кепку спёрли?
Поздравил православных с Рождеством, а Б. Фишеру не понравилось - атеист, наверное. Похоже на глюки движка.
Дело в том, что в системе ВООБЩЕ нет ЧИСТОГО возвратно-поступательного движения. Т.е. оно-то есть (силовой поводок относительно обойм поворотной фермы), но это движение неинформативно - ТОЛЬКО из него одного НЕвозможно вычислить координаты КС в плоскости сечения трубы.
А другие возвратно-поступательные движения неотделимы от угловых перемещений: кольца кардана, КС, поворотная ферма, силовой поводок: двигаясь, они изменяют И свой угол, И координаты в плоскости поперечного сечения. Но информативные УГЛОВЫЕ перемещения МОЖНО отделить от возвратно поступательных, и сделать это проще всего именно на кардане: нужно разместить плоскость разнесенных фотосенсоров в плоскости вращения колец кардана, см. рисунок.
Ckona> Сразу видно различие: со среднего кольца нужен будет гибкий жгут, от актуаторов все жгуты неподвижные. Но чем ближе к РД, тем достовернее данные по ориентации ВТ.
Именно. Недостаток мизерный, преимущество - очевидное.
Ckona>
Почему исчезла твоя аватара? Ты побрился или кепку спёрли?Поздравил православных с Рождеством, а Б. Фишеру не понравилось - атеист, наверное. Похоже на глюки движка.
Прикреплённые файлы:
Крайние точки; видны взаимные положения пары сенсоров и осветителя. Такая же картина и на второй паре колец. Жгут прокладывается по кольцам и вдоль осей как по мостикам, от внутреннего кольца к внешнему - единый жгут на две оси. Таким образом деформации проводников жгута сводятся к весьма незначительному кручению.
Все-таки 3D - большое подспорье в конструкторской деятельности. Изучайте и применяйте в деле! Редакторы год от года совершенствуются, появляются новые возможности - имхо самое время вскочить в этот поезд...
Все-таки 3D - большое подспорье в конструкторской деятельности. Изучайте и применяйте в деле! Редакторы год от года совершенствуются, появляются новые возможности - имхо самое время вскочить в этот поезд...
Это сообщение редактировалось 20.01.2009 в 16:05
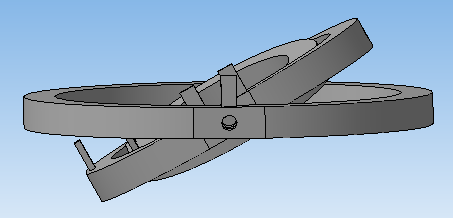
Вариант расположения оптопары. Может потребоваться, если осевой люфт колец будет приводить к большим ошибкам положения. Сложнее чем первый, но пусть пока будет...
Прикреплённые файлы:
Non-Conformist> Все эти нюансы (качество работы регулятора) проверяются на перевернутом маятнике... надо будет только подобрать соответствующие коэффициенты.
Я не согласен с этим, и в силу неравнодушности - высказываюсь, хотя и на "любительском" (непрофессиональном) уровне.
Пусть перевернутый маятник внезапно отклонился:
Чтобы вернуть его в вертикальное положение, актуатор должен смещать точку опоры, вот так:
Теперь пусть ракета внезапно отклонилась по углу (повернулась):
Чтобы вернуть ее в исходное положение, вектор тяги надо отклонять вот так:

Я понимаю - в любой сложной следящей системе можно сделать коэффициенты нулевыми ("подобрать").
Но маятник с подвижной опорой и ракета с УВТ - принципиально разные объекты регулирования !
У маятника есть жесткая точка опоры, у ракеты - нет.
Почему маятником можно проверять ракету ?
Я не согласен с этим, и в силу неравнодушности - высказываюсь, хотя и на "любительском" (непрофессиональном) уровне.
Пусть перевернутый маятник внезапно отклонился:
Чтобы вернуть его в вертикальное положение, актуатор должен смещать точку опоры, вот так:
Теперь пусть ракета внезапно отклонилась по углу (повернулась):
Чтобы вернуть ее в исходное положение, вектор тяги надо отклонять вот так:
Я понимаю - в любой сложной следящей системе можно сделать коэффициенты нулевыми ("подобрать").
Но маятник с подвижной опорой и ракета с УВТ - принципиально разные объекты регулирования !
У маятника есть жесткая точка опоры, у ракеты - нет.
Почему маятником можно проверять ракету ?
> Почему маятником можно проверять ракету?
Профессор Поляков писал мне, что маятником традиционно проверяется ЛЮБАЯ сложная неустойчивая система. Про ракеты он конкретно не говорил, но у меня сложилось впечатление, что и эта система может быть с успехом проверена перевернутым маятником. Другое дело, что КОЭФФИЦИЕНТЫ "Кобры" и маятника будут разными, но ПРИНЦИП останется один и тот же - ПИД (ПД).
В любом случае - ты не согласен, я понимаю тебя. Каковы твои предложения? С профессорской помощью я ОЧЕНЬ надеюсь свести наземные огневые испытания к минимуму... Хотя, если мы доберемся хотя бы до "Кобры" - это УЖЕ будет большим успехом...
Профессор Поляков писал мне, что маятником традиционно проверяется ЛЮБАЯ сложная неустойчивая система. Про ракеты он конкретно не говорил, но у меня сложилось впечатление, что и эта система может быть с успехом проверена перевернутым маятником. Другое дело, что КОЭФФИЦИЕНТЫ "Кобры" и маятника будут разными, но ПРИНЦИП останется один и тот же - ПИД (ПД).
В любом случае - ты не согласен, я понимаю тебя. Каковы твои предложения? С профессорской помощью я ОЧЕНЬ надеюсь свести наземные огневые испытания к минимуму... Хотя, если мы доберемся хотя бы до "Кобры" - это УЖЕ будет большим успехом...
Ckona> Чтобы вернуть его в вертикальное положение, актуатор должен смещать точку опоры, вот так:
Это ты нарисовал для случая, когда у маятника есть задача только сохранить вертикальное положение, а задачи сохранить и точку стояния - нет. Т.е. маятник начал падать - проехал немного в сторону падения, выровнялся и ОСТАЛСЯ В НОВОЙ ТОЧКЕ РАВНОВЕСИЯ, а не там, где был сначала.
А здесь речь о другом маятнике - он должен не только стоять вертикально, но и оставаться в одной точке (под лампой), лишь немного отъезжая от неё в момент выравнивания. Такому маятнику для выравнивания и возвращение в исходную точку нужен такой же импульс, как ты нарисовал для ракеты.
Это ты нарисовал для случая, когда у маятника есть задача только сохранить вертикальное положение, а задачи сохранить и точку стояния - нет. Т.е. маятник начал падать - проехал немного в сторону падения, выровнялся и ОСТАЛСЯ В НОВОЙ ТОЧКЕ РАВНОВЕСИЯ, а не там, где был сначала.
А здесь речь о другом маятнике - он должен не только стоять вертикально, но и оставаться в одной точке (под лампой), лишь немного отъезжая от неё в момент выравнивания. Такому маятнику для выравнивания и возвращение в исходную точку нужен такой же импульс, как ты нарисовал для ракеты.
А теперь расскажите мне, что конкретно требуется от датчика положения маршевого двигателя? Какие параметры критичны, а какие - нет?
Собственно, все уже готово, в понедельник планирую приступить к сборке кардана (на полуде), и по готовности - начать сборку последнего варианта датчика положения (см. чуть выше). Я так понимаю, что главное для датчика - монотонность показаний (без экстремумов в пределах рабочего диапазона углов отклонения ВТ). Линейность приветствуется (с ней проще), но в случае применения МК она вовсе не обязательна. Правильно ли я понимаю ситуацию?
Как будет настраиваться датчик? Как МК узнает о том, что вот столько-то милливольт по ои "Х" и столько-то по оси "У" соответствуют нулевому отклонению ВТ от оси ракеты? Максимальному отклонению? Можно ли все это настроить программно? Ответьте "да/нет", пока не залезая в дебри. Эта информация нужна мне затем, чтобы определиться, можно ли законтрить предварительно настроенный датчик эпоксидкой, или в процессе окончательной настройки надо будет подгибать-отгибать-двигать фотоприемники.
Собственно, все уже готово, в понедельник планирую приступить к сборке кардана (на полуде), и по готовности - начать сборку последнего варианта датчика положения (см. чуть выше). Я так понимаю, что главное для датчика - монотонность показаний (без экстремумов в пределах рабочего диапазона углов отклонения ВТ). Линейность приветствуется (с ней проще), но в случае применения МК она вовсе не обязательна. Правильно ли я понимаю ситуацию?
Как будет настраиваться датчик? Как МК узнает о том, что вот столько-то милливольт по ои "Х" и столько-то по оси "У" соответствуют нулевому отклонению ВТ от оси ракеты? Максимальному отклонению? Можно ли все это настроить программно? Ответьте "да/нет", пока не залезая в дебри. Эта информация нужна мне затем, чтобы определиться, можно ли законтрить предварительно настроенный датчик эпоксидкой, или в процессе окончательной настройки надо будет подгибать-отгибать-двигать фотоприемники.

Калибровал когда-нибудь джойстик в Виндовз? Вот мне видится аналогичная процедура. Нужна будет еще одна кнопка.
GOGI> Калибровал когда-нибудь джойстик в Виндовз? Вот мне видится аналогичная процедура. Нужна будет еще одна кнопка.
"Чую, что будет ЛИТР - а доказать не могу". Расскажи в общих чертах? Никогда не занимался ничем подобным. Как там решается проблема нелинейности датчиков при ДВИЖЕНИИ по диапазону? С крайними-то точками более-менее понятно... Как "обучить" МК работать именно с ДАННЫМ экземпляром датчика положения? Будет ли нужен какой-то стенд, например с лазерными указками?
"Чую, что будет ЛИТР - а доказать не могу". Расскажи в общих чертах? Никогда не занимался ничем подобным. Как там решается проблема нелинейности датчиков при ДВИЖЕНИИ по диапазону? С крайними-то точками более-менее понятно... Как "обучить" МК работать именно с ДАННЫМ экземпляром датчика положения? Будет ли нужен какой-то стенд, например с лазерными указками?
Реклама Google — средство выживания форумов :)
Калибровка делается очень просто. Джойстик ставится в центральное положение и нажимается кнопка. Компьютер запоминает выходные сигналы. Потом он делает несколько оборотов от упора до упора и компьютер запоминает предельные значения. Джойстик снова ставится в центральное положение и снова нажимается кнопка. Так задается зона нечувствительности в центре.
Линеаризация не делается, считается что резисторы достаточно линейны.
Зря кстати ты от резисторов отказался У меня до сих пор живой мой первый джойстик, купленный за 300 р. в 99 году. Подключать сейчас его некуда, но судя по показаниям омметра, он еще вполне ничего. А у него число перемещений от упора до упора явно за десять тысяч.
Линеаризация не делается, считается что резисторы достаточно линейны.
Зря кстати ты от резисторов отказался
У меня до сих пор живой мой первый джойстик, купленный за 300 р. в 99 году. Подключать сейчас его некуда, но судя по показаниям омметра, он еще вполне ничего. А у него число перемещений от упора до упора явно за десять тысяч.
Copyright © Balancer 1997..2019
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
