-
/1247608-large_91513564-ca70-4c96-9f6b-f21dcc28755e.jpg)
Постройка эксперементального колесного шасси
Журнал разработокТеги:
/1247608-large_91513564-ca70-4c96-9f6b-f21dcc28755e.jpg)
 Felles28
Felles28

Felles28
втянувшийся
Надеюсь, никто не будет против, если я создам своеобразный дневник своей работы ")
В нем планирую оставлять записи о ключевых моментах работы, чертежи, схемы и т.д. Всегда рад конструктивной критике и советам.
Это мой(вернее, наш, работаем на пару с другом) второй проект, на первый можно взглянуть тут(слабонервным лучше не видеть ):
):
А-0. Прототип автомодели
Пока с ракетами что-то не ладится, решили занятся постройкой простенькой автомодели. Первый образец готов, хоть во многом и откровенно сырой. Улучшенная версия на подходе.
Идеология проекта. Создать простое колесное шасси с последующими апгрейдами(вооружение, башня, манипулятор и т.д.), то же самое по аппаратуре управления(начинаем с простейшего проводного, в дальнейшем планируем заменить на радио/Wi-fi/Bluetooth)
В принципе, первый этап-постройка непосредственно шасси, почти окончен, осталось только перепаять отваливштеся контакты на пульте. Но обо всем по порядку.
")
В нем планирую оставлять записи о ключевых моментах работы, чертежи, схемы и т.д. Всегда рад конструктивной критике и советам.
Это мой(вернее, наш, работаем на пару с другом) второй проект, на первый можно взглянуть тут(слабонервным лучше не видеть
 ):
):А-0. Прототип автомодели
Пока с ракетами что-то не ладится, решили занятся постройкой простенькой автомодели. Первый образец готов, хоть во многом и откровенно сырой. Улучшенная версия на подходе.
Идеология проекта. Создать простое колесное шасси с последующими апгрейдами(вооружение, башня, манипулятор и т.д.), то же самое по аппаратуре управления(начинаем с простейшего проводного, в дальнейшем планируем заменить на радио/Wi-fi/Bluetooth)
В принципе, первый этап-постройка непосредственно шасси, почти окончен, осталось только перепаять отваливштеся контакты на пульте. Но обо всем по порядку.
Мой канал на Ютубе: https://www.youtube.com/channel/UCeOn69K4MkT74mIRL4vyCfA


 инфо
инфо инструменты
инструменты
Felles28
втянувшийся
1. Рама
Третьего дня выпилил из листового ПВХ(4 мм) вот такое основание. Чертежи и фото ниже.
Третьего дня выпилил из листового ПВХ(4 мм) вот такое основание. Чертежи и фото ниже.
Прикреплённые файлы:

Мой канал на Ютубе: https://www.youtube.com/channel/UCeOn69K4MkT74mIRL4vyCfA
Felles28
втянувшийся
2. Двигатели
В качестве движков выбраны мотор-редукторы от Ардуино, колеса от них же. Дороговаты конечно...
Да, забыл сказать о конструктивных особенностях. Шасси заднеприводное, поворот осуществляется за счет отключения или реверсирования одного из двигателей. Не лучшая схема, но как начальная точка, по моему, годится.
Поломав голову над креплением, остановился на банальном приклеивании. Редукторы крепятся на двухстороннюю вспененую ленту и сверху и снизу. Сверху наложена пластина того же ПВХ 35×60. Крепление довольно жесткое, колебания и люфты практически отстутствуют.
В качестве движков выбраны мотор-редукторы от Ардуино, колеса от них же. Дороговаты конечно...
Да, забыл сказать о конструктивных особенностях. Шасси заднеприводное, поворот осуществляется за счет отключения или реверсирования одного из двигателей. Не лучшая схема, но как начальная точка, по моему, годится.
Поломав голову над креплением, остановился на банальном приклеивании. Редукторы крепятся на двухстороннюю вспененую ленту и сверху и снизу. Сверху наложена пластина того же ПВХ 35×60. Крепление довольно жесткое, колебания и люфты практически отстутствуют.
Прикреплённые файлы:


Мой канал на Ютубе: https://www.youtube.com/channel/UCeOn69K4MkT74mIRL4vyCfA
Felles28
втянувшийся
Дико извиняюсь, но отчего то некоторые фотографии вверх ногами.
Пульт управления
Это 4 кнопки-переключателя, позволяющие запускать оба двигателя в обеих направлениях. На схеме все понятно(схема одна, но таких блока 2, для каждого двигателя).
Пульт управления
Это 4 кнопки-переключателя, позволяющие запускать оба двигателя в обеих направлениях. На схеме все понятно(схема одна, но таких блока 2, для каждого двигателя).
Прикреплённые файлы:
Мой канал на Ютубе: https://www.youtube.com/channel/UCeOn69K4MkT74mIRL4vyCfA
Felles28
втянувшийся
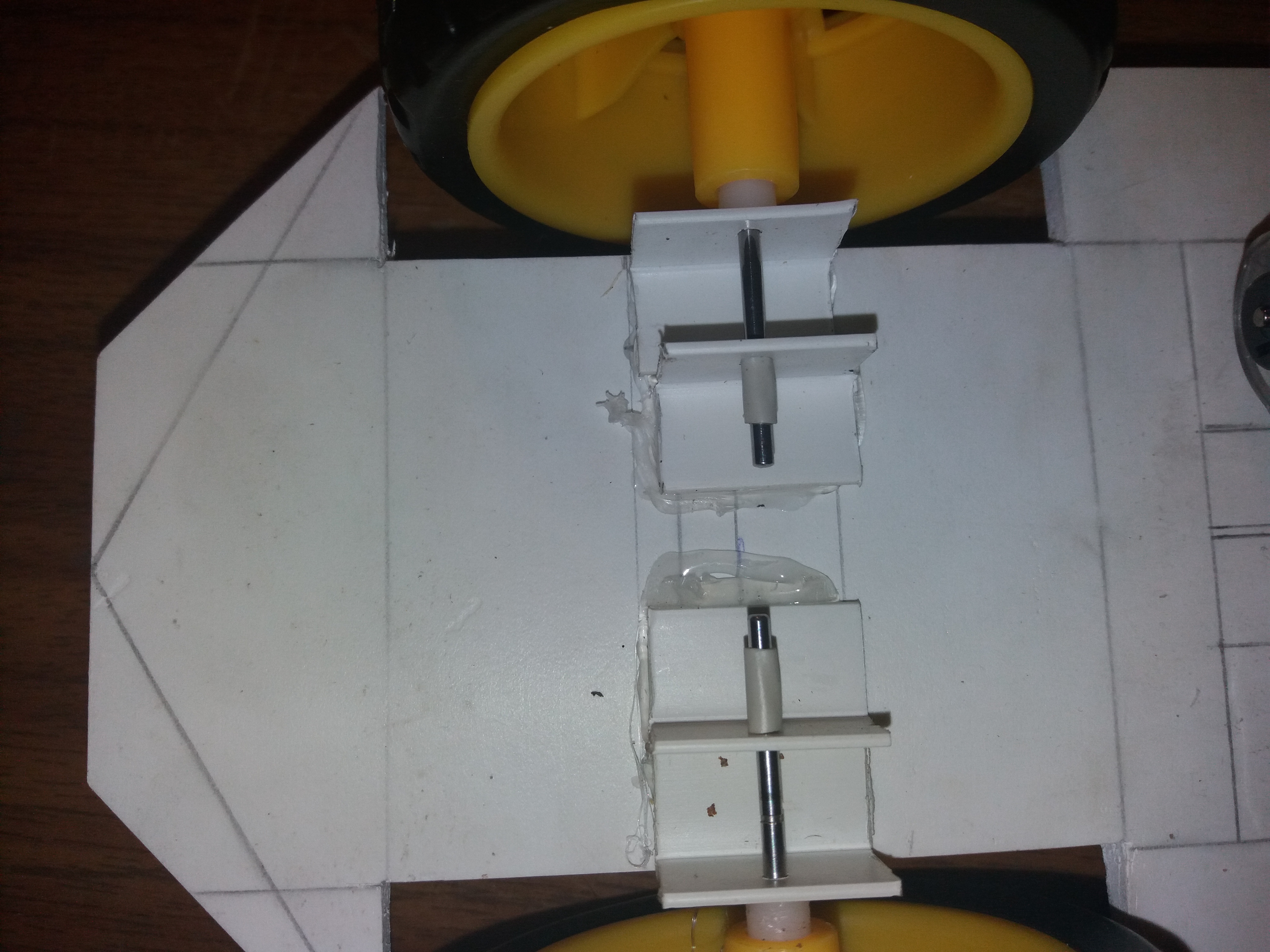
Передняя ось
Т.к. колеса и крепления к ним подразумевали установку на вал редуктора, то логичным решением стало скрутить аналогичные валы с других движков. Что я и сделал.
Из ПВХ уголков 10×10 изготовил кронштейны для валов, по 2 на каждый. Просверлил один, использовал его как шаблон для других. Затем все это дело приклеено на сопли к основанию. Дабы валы не выпадали, на концы надеты кембрики из изоляции провода от мышки(который используется и в пульте управления).
Немного прогадал с высотой крепления валов, из за этого машинка смотрит в небеса.
Колеса крутятся без заметного трения, но дополнительно смажу машинным маслом.
На данный момент это все что есть, чуть позже сделаю видео с тест-драйвом модели. А затем будем думать, что именно улучшать...
Т.к. колеса и крепления к ним подразумевали установку на вал редуктора, то логичным решением стало скрутить аналогичные валы с других движков. Что я и сделал.
Из ПВХ уголков 10×10 изготовил кронштейны для валов, по 2 на каждый. Просверлил один, использовал его как шаблон для других. Затем все это дело приклеено на сопли к основанию. Дабы валы не выпадали, на концы надеты кембрики из изоляции провода от мышки(который используется и в пульте управления).
Немного прогадал с высотой крепления валов, из за этого машинка смотрит в небеса.
Колеса крутятся без заметного трения, но дополнительно смажу машинным маслом.
На данный момент это все что есть, чуть позже сделаю видео с тест-драйвом модели. А затем будем думать, что именно улучшать...
Прикреплённые файлы:

Мой канал на Ютубе: https://www.youtube.com/channel/UCeOn69K4MkT74mIRL4vyCfA
 GOLF_stream
GOLF_stream

Извините, Вам сколько лет? Не больше шестнадцати?
Можно, конечно, игнорировать весь опыт, накопленный за тысячелетия использования колеса. Только какой в этом смысл? Тогда логично отказаться и от колеса, как такового.
Можно, конечно, игнорировать весь опыт, накопленный за тысячелетия использования колеса. Только какой в этом смысл? Тогда логично отказаться и от колеса, как такового.



G.s.> Извините, Вам сколько лет? Не больше шестнадцати?
Скорее не больше 12-и. В 15 - 16 лет мы уже самостоятельно ремонтировали мопеды, магнитофоны и с нуля собирали приемопередатчики, делали достаточно хорошие модели кораблей.
Скорее не больше 12-и. В 15 - 16 лет мы уже самостоятельно ремонтировали мопеды, магнитофоны и с нуля собирали приемопередатчики, делали достаточно хорошие модели кораблей.

Felles28
втянувшийся
G.s.> Извините, Вам сколько лет? Не больше шестнадцати?
G.s.> Можно, конечно, игнорировать весь опыт, накопленный за тысячелетия использования колеса. Только какой в этом смысл? Тогда логично отказаться и от колеса, как такового.
Ехх, чуток больше.
17 по правде.
А что именно игнорирую? Поворотный механизм?
G.s.> Можно, конечно, игнорировать весь опыт, накопленный за тысячелетия использования колеса. Только какой в этом смысл? Тогда логично отказаться и от колеса, как такового.
Ехх, чуток больше.
17 по правде.
А что именно игнорирую? Поворотный механизм?
Мой канал на Ютубе: https://www.youtube.com/channel/UCeOn69K4MkT74mIRL4vyCfA
Felles28
втянувшийся
Ладно, нет критики и фиг с ней.
Собрали дистанционное управление на блютузе, подробности чуть позже.
Из наметившихся проблем:
1. Колеса спереди имеют тенденцию слетать. Нужно придумать крепление лучше чем это.
2. Разворот за счет движков таки не очень. Такое ощущение, будто рулишь танком, а не машинкой, маневренности никакой. Поэтому, скрепя сердцем,пожертвуем единственную сервомашинку на рулевой механизм.
3. Из перспективных проблем, занимаюсь разработкой манипулятора(пока с 1 степенью свободы, т.е., собственно, клешней), а также пушки. Если у кого то есть опыт в создании первого или второго, пожалуйста, поделитесь. В тырнетах есть инфа, но очень скудная, вроде переделки пушки от игрушечного танка.
Собрали дистанционное управление на блютузе, подробности чуть позже.
Из наметившихся проблем:
1. Колеса спереди имеют тенденцию слетать. Нужно придумать крепление лучше чем это.
2. Разворот за счет движков таки не очень. Такое ощущение, будто рулишь танком, а не машинкой, маневренности никакой. Поэтому, скрепя сердцем,пожертвуем единственную сервомашинку на рулевой механизм.
3. Из перспективных проблем, занимаюсь разработкой манипулятора(пока с 1 степенью свободы, т.е., собственно, клешней), а также пушки. Если у кого то есть опыт в создании первого или второго, пожалуйста, поделитесь. В тырнетах есть инфа, но очень скудная, вроде переделки пушки от игрушечного танка.
Мой канал на Ютубе: https://www.youtube.com/channel/UCeOn69K4MkT74mIRL4vyCfA

Felles28> Ладно, нет критики и фиг с ней.
Felles28> Собрали дистанционное управление на блютузе, подробности чуть позже.
Felles28> Из наметившихся проблем:
Felles28> 1. Колеса спереди имеют тенденцию слетать. Нужно придумать крепление лучше чем это.
Felles28> 2. Разворот за счет движков таки не очень. Такое ощущение, будто рулишь танком, а не машинкой, маневренности никакой. Поэтому, скрепя сердцем,пожертвуем единственную сервомашинку на рулевой механизм.
Felles28> 3. Из перспективных проблем, занимаюсь разработкой манипулятора(пока с 1 степенью свободы, т.е., собственно, клешней), а также пушки. Если у кого то есть опыт в создании первого или второго, пожалуйста, поделитесь. В тырнетах есть инфа, но очень скудная, вроде переделки пушки от игрушечного танка.
Уменьшите базу
Увеличьте клиренс до 3 см
Поставьте снизу косу
Продавайте сотнями робота для прополки
Felles28> Собрали дистанционное управление на блютузе, подробности чуть позже.
Felles28> Из наметившихся проблем:
Felles28> 1. Колеса спереди имеют тенденцию слетать. Нужно придумать крепление лучше чем это.
Felles28> 2. Разворот за счет движков таки не очень. Такое ощущение, будто рулишь танком, а не машинкой, маневренности никакой. Поэтому, скрепя сердцем,пожертвуем единственную сервомашинку на рулевой механизм.
Felles28> 3. Из перспективных проблем, занимаюсь разработкой манипулятора(пока с 1 степенью свободы, т.е., собственно, клешней), а также пушки. Если у кого то есть опыт в создании первого или второго, пожалуйста, поделитесь. В тырнетах есть инфа, но очень скудная, вроде переделки пушки от игрушечного танка.
Уменьшите базу
Увеличьте клиренс до 3 см
Поставьте снизу косу
Продавайте сотнями робота для прополки
10 из 10...
Пауль не предсказывает будущее,
он им управляет...

Felles28
втянувшийся
ZaKos> Уменьшите базу
ZaKos> Увеличьте клиренс до 3 см
ZaKos> Поставьте снизу косу
ZaKos> Продавайте сотнями робота для прополки
Прямо уже вижу себя новым Генри Фордом в колхозе
ZaKos> Увеличьте клиренс до 3 см
ZaKos> Поставьте снизу косу
ZaKos> Продавайте сотнями робота для прополки
Прямо уже вижу себя новым Генри Фордом
в колхозе
Мой канал на Ютубе: https://www.youtube.com/channel/UCeOn69K4MkT74mIRL4vyCfA

ZaKos> Уменьшите базу
ZaKos> Увеличьте клиренс до 3 см
ZaKos> Поставьте снизу косу
ZaKos> Продавайте сотнями робота для прополки
таки газонокосилки давно изобретены и продаются...
Робот газонокосилка
робот газонокосилка,газонокосилка робот отзывы,газонокосилка робот видео,робот газонокосилка robomow,робот газонокосилка bosch,робот газонокосилка купить,газонокосилка робот bosch indego,робот газонокосилка husqvarna,робот газонокосилка caiman,робот газонокосилка цена
ZaKos> Увеличьте клиренс до 3 см
ZaKos> Поставьте снизу косу
ZaKos> Продавайте сотнями робота для прополки
таки газонокосилки давно изобретены и продаются...
Робот газонокосилка
робот газонокосилка,газонокосилка робот отзывы,газонокосилка робот видео,робот газонокосилка robomow,робот газонокосилка bosch,робот газонокосилка купить,газонокосилка робот bosch indego,робот газонокосилка husqvarna,робот газонокосилка caiman,робот газонокосилка цена
ZaKos>> Уменьшите базу
ZaKos>> Увеличьте клиренс до 3 см
ZaKos>> Поставьте снизу косу
ZaKos>> Продавайте сотнями робота для прополки
O.O.> таки газонокосилки давно изобретены и продаются...
O.O.> Робот газонокосилка - YouTube
Речь шла о прополке. Не о тотальном уничтожении
ZaKos>> Увеличьте клиренс до 3 см
ZaKos>> Поставьте снизу косу
ZaKos>> Продавайте сотнями робота для прополки
O.O.> таки газонокосилки давно изобретены и продаются...
O.O.> Робот газонокосилка - YouTube
Речь шла о прополке. Не о тотальном уничтожении
10 из 10...
Пауль не предсказывает будущее,
он им управляет...
ZaKos> Речь шла о прополке. Не о тотальном уничтожении
Ну блин на вас не угодиш,каким образом тупая железяка отличит огурцы от полыни
может вам еще аппарат для сбора и сортировки МарьИванны спроектировать
Ну блин на вас не угодиш,каким образом тупая железяка отличит огурцы от полыни
может вам еще аппарат для сбора и сортировки МарьИванны спроектировать
ZaKos>> Речь шла о прополке. Не о тотальном уничтожении
O.O.> Ну блин на вас не угодиш,каким образом тупая железяка отличит огурцы от полыни
O.O.> может вам еще аппарат для сбора и сортировки МарьИванны спроектировать
3 см. Или скобку аналогичной высоты.
O.O.> Ну блин на вас не угодиш,каким образом тупая железяка отличит огурцы от полыни
O.O.> может вам еще аппарат для сбора и сортировки МарьИванны спроектировать
3 см. Или скобку аналогичной высоты.
10 из 10...
Пауль не предсказывает будущее,
он им управляет...
Felles28
втянувшийся
ZaKos>> Речь шла о прополке. Не о тотальном уничтожении
O.O.> Ну блин на вас не угодиш,каким образом тупая железяка отличит огурцы от полыни
Сделать систему наведения, которая будет распознавать контур огурца , как на вертолете.
O.O.> Ну блин на вас не угодиш,каким образом тупая железяка отличит огурцы от полыни
Сделать систему наведения, которая будет распознавать контур огурца
, как на вертолете.
Мой канал на Ютубе: https://www.youtube.com/channel/UCeOn69K4MkT74mIRL4vyCfA
Felles28> Сделать систему наведения, которая будет распознавать контур огурца , как на вертолете.
Когда уже огурцы,полоть не зачем,их уже собирать трэба,а прополоть грядку с рассадой,вот засада
, как на вертолете.Когда уже огурцы,полоть не зачем,их уже собирать трэба,а прополоть грядку с рассадой,вот засада
Copyright © Balancer 1997..2018
Создано 07.08.2018
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 07.08.2018
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
