-
![[image]](https://www.balancer.ru/cache/sites/i/m/img580.imageshack.us/img580/64/128x128-crop/img1044x.th.jpg)
ЭД, муфты, дейдвуды,аккумуляторы, гребные винты и т.д.
Теги:
 9-лшт1263
9-лшт1263

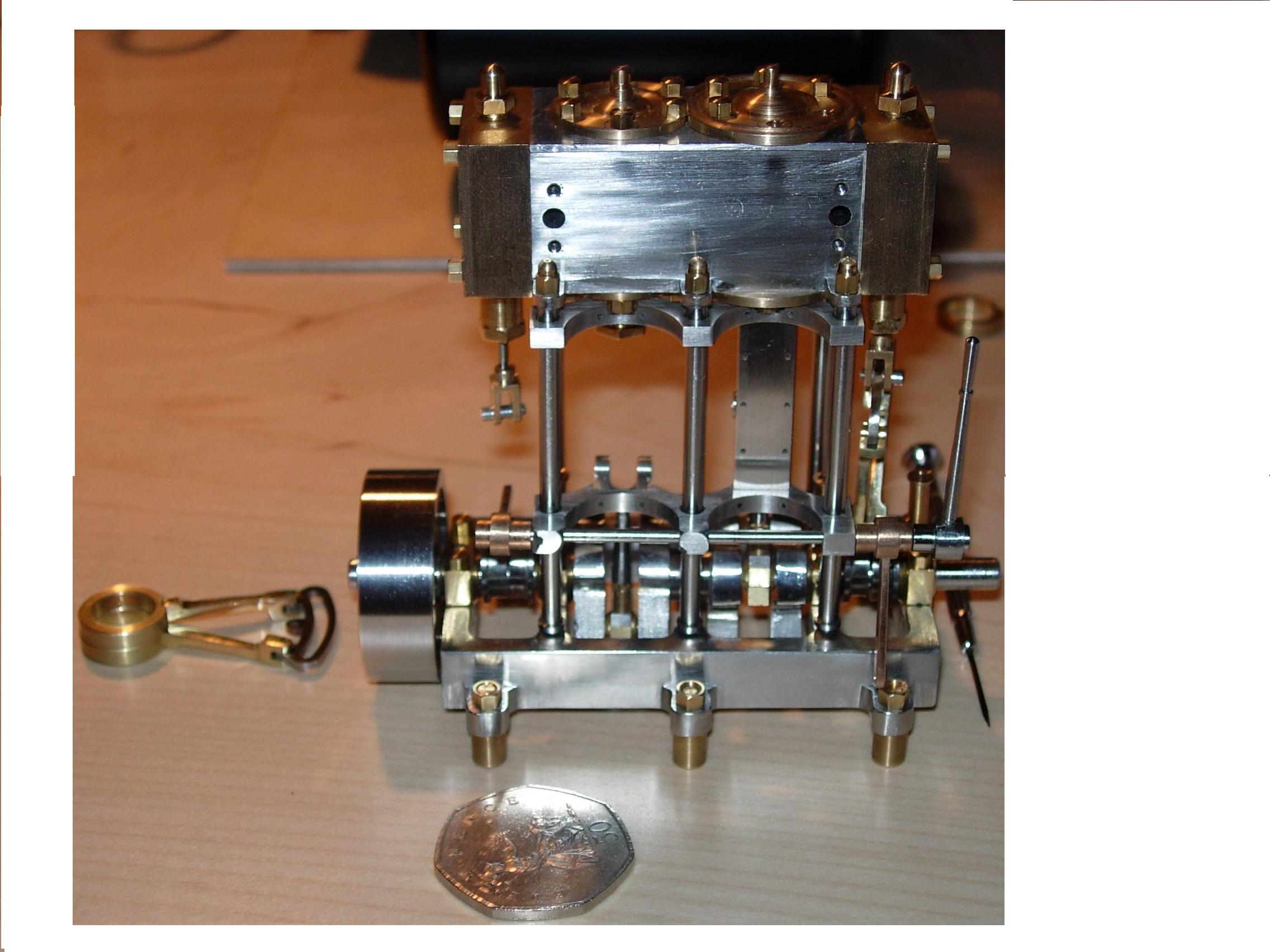
Загнались все по электричеству. А не вспомнить ли нам старую добрую паровую машину?
 инфо
инфо инструменты
инструменты
9-лшт1263> Загнались все по электричеству. А не вспомнить ли нам старую добрую паровую машину?
на 1155 ?
на 1155 ?
")
 boris2005
boris2005

Извиняюсь,глупые вы все. Я же не предлагаю паровую машину ставить на космический корабль,хотя космический парусный корабль Я видел в ОСТРОВЕ СОКРОВИЩ. Я вам тут тему для размышления под брошу. Модель паровой машины(действующая)+дествующий котел.Модель миноносец.
Прикреплённые файлы:
Продолжение-2
Прикреплённые файлы:

Продолжение-3
Прикреплённые файлы:

Тут не особо давно по КУЛЬТУРЕ поздно ночью показали англо-американский фильм.1-я Мировая война в Африке.Двое патриотов спускаются на паровом катере по реке через пороги и водопад к озеру(ЧАД). Там они с помощью кислородных баллонов,взрывчатки и пары капсулей взрывают немецкий вооруженный пароход.

A.S.> Сложность в разработке дозатора дыма в ствол хотя идея есть одна ))
В Моделисте в 90-х, кажется, была статья об иммитаторе выстрела специально для копий кораблей (основана на элементарном электролизе воды). поройтесь в американских сайтах - у них есть статьи и фотографии подобных установок...
В Моделисте в 90-х, кажется, была статья об иммитаторе выстрела специально для копий кораблей (основана на элементарном электролизе воды). поройтесь в американских сайтах - у них есть статьи и фотографии подобных установок...
А дымогенератор есть у железнодорожных моделистов/в смысле в продаже/.На спираль капелька масла и все.Есть белый,есть черный.Дым, в смысле.

Andru Sniper
новичок
Ну да дымогенератор можно придумать это не особо сложно, вопрос в дозаторе порций дыма в ствол орудия, на каждый выстрел нужно ведь какое-то кол-во дыма, одноразовое не интересно делать, нужно многоразовое изобретать ))
Andru Sniper
новичок
Борис, а что такое раздрай? Я догадываюсь, что это управление вращением двигателей в разные стороны, для увеличения эффективности рулевой тяги, или при маневрировании, это так?
Как правило раздрай делается на крайних положениях руля/рулей/.Совершенно правильно:вращение одного винта в противоположную сторону при нормальной работе второго.Очень эффективно при лопастях установленных под 45 градусов-в этом случае разворот почти на месте.При нормальной закрутке винтов желательно разное количество оборотов-тот винт, который работает вперед при одинаковых оборотах гребет сильнее.Для "фигуристов"/классы Ф2-Ф4/ сохранение небольшого движения вперед при раздрае выгодно,т.к. остановка на дистанции,как и задний ход штрафуется очередными воротами.

раздрай - вещь полезная. Особенно при швартовке и маневрировани на молом ходу, когда руль неэффективен.
На самом деле работа винтов враздрай может быть никак не связана с полжением руля. Всё зависит от личных пристраститй и возможностей аппаратуры управления.
А о угле лапастей в 45 градусов - это вообще не понятно из какой оперы взято. Какое отношение это имеет к винту? Или имелась в виду перекладка руля на 45 градусов? А вот о разной скорости вращения винтов - это правильно. И зависит это не только от конструкции винтов, но и от обводов корпуса.
На самом деле работа винтов враздрай может быть никак не связана с полжением руля. Всё зависит от личных пристраститй и возможностей аппаратуры управления.
А о угле лапастей в 45 градусов - это вообще не понятно из какой оперы взято. Какое отношение это имеет к винту? Или имелась в виду перекладка руля на 45 градусов? А вот о разной скорости вращения винтов - это правильно. И зависит это не только от конструкции винтов, но и от обводов корпуса.
Взято из многолетнего опыта.Мои модели на всех ходах рулились нормально.Раздрай был нужен при резких поворотах/крайне редко/ и при швартовке.45 градусов-установка лопасти к валу .Простая плоская лопата,без закрутки.Тогда раздрай дает разворот на месте.Можно раздрай и не привязывать к рулям,но тогда нужно вводить дополнительные ручки управления.А при чем тут обводы?Ясно же, что закрутка лопастей усиливает отброшенный поток,но только в одну сторону-назад,а вперед поток при тех же оборотах будет гораздо меньше.А обводы в этих рассуждениях от лукавого.
Andru Sniper
новичок
Ок. Спасибо, Борис, а вы на своих моделях ступенчато меняете обороты двигателя или по аналоговому сигналу? А меняете скорее всего напряжение да?
Раньше было ступенчато,по секциям батарей.Сейчас ставлю спидконтроллеры с реверсом.Спасибо Крэбсу и моим ребятом из Новосибирска.
можно, конечно, издеваться над лопастями, делая их плоскими под углом 45 градусов, но всё это только лишь ради раздрая? Не слишком ли большая плата за сомнительное удовольствие? Вы же сами сказали, что обороты можно регулировать. Так и делайте лопасти такими, какие они должны быть для эффективного полного хода.
А что касается обводов, то они влияют как раз на отбрасываемую струю. Особенно это влияние сказывается когда обводы перед винтом достаточно круто переходят от полных к сильно вогнутым с килеватостью. Тогда струя на реверс отклоняется корпусом и тормозится им же, что придаёт модели дополнительный поворачивающий импульс.
А что касается обводов, то они влияют как раз на отбрасываемую струю. Особенно это влияние сказывается когда обводы перед винтом достаточно круто переходят от полных к сильно вогнутым с килеватостью. Тогда струя на реверс отклоняется корпусом и тормозится им же, что придаёт модели дополнительный поворачивающий импульс.
Беда в том,что спидконтроллер при двух параллельных моторах регулирует их одинаково.При ступенчатой регулировке можно один двигатель включить на средний назад,другой на малый вперед,ну или средний-полный,но это сильно усложняет схему.Никакого издевательства над винтами нет-это была общая практика.Кто строил классы Ф2-Ф4 прекрасно знают этот нюанс.Так же как и обратную установку винтов:вращение не наружу ,а внутрь для получения компактного потока.Это МОДЕЛЬ,а не реальный корабль и кое-что работает не так.Или давайте "делать" воду в соответствующем масштабе: с соответствующей текучестью и прочими параметрами.Так вот повторяю:при 45 градусах модель "танцует" на месте,а это чревато штрафными санкциями.Прочтите внимательно и непредвзято,что я написал ранее:модель на всей дистанции должна сохранять передний ход.Только последние ворота проходят задним ходом.Поэтому 45 можно было сделать,но не делали.Движение вперед при раздрае было выгодно.
если хочется и раздрай и регулятор хода, то на каждый вал надо ставить свой регулятор. Если пользоваться одним, то всё равно надо городить схему с переключателями. У меня было такое. На трёхвальном пароходе боковые винты разботали через один регулятор враздрай, который включался рулевой машинкой в крайних положениях руля. Средний вал включался релюшкой только при полном вперёд.
Можно придумать много разных схем управления раздраем. Каждый может выбрать тот вариант, который ему больше понравится.
Можно придумать много разных схем управления раздраем. Каждый может выбрать тот вариант, который ему больше понравится.
А Жорник просто прошил ПИК контроллер своей прогой на который завел и руль и газ и управлял 2 моторами на модельке если не врет водоизмещением всего 40 гр.!? (Сверчек польской ф.Мираж М1:400)
Я у него тогда схемку и прошивку выпросил, но попробовать так и не довелось, если найду после того как винт умер года 1,5 назадж, поделюсь...
Я у него тогда схемку и прошивку выпросил, но попробовать так и не довелось, если найду после того как винт умер года 1,5 назадж, поделюсь...
Разумеется на сегодняшний день можно сделать что угодно.Только это будет"плавающий компьютер".Так может пойти дальше-построить,спустить на воду,а дальше пусть живет как знает.Сам добывает "пропитание",оснащение.Может примут за настоящий и потопят ракетным залпом-неопознанный все-таки/Вслед ушедшему 1 апреля/
Andru Sniper
новичок
Борис, так и есть тот контролллер о котором я писал и есть практически компьютер, только промышленный )) программируется на ассемблере.
Copyright © Balancer 1997..2024
Создано 01.06.2006
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 01.06.2006
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
