 Cormorant
Cormorant





 инфо
инфо инструменты
инструменты
 Fakir
Fakir




 Fakir
Fakir
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/le/lenta/icdn/images/2014/12/17/01/20141217015455125/128x128-crop/original_1235820288137179a376003c9ae25d50.jpg)
Curiosity: Mars Science Laboratory
ровер марсианскийТеги:
Следующий шаг в исследованиях Марса

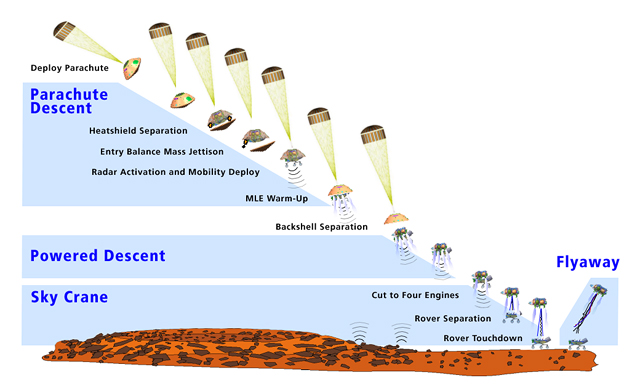
Любопытен способ посадки ровера:
как с "летающего крана" его спускают.
Вопрос: в чем профит такого способа? Ведь, при этом больший расход топлива будет, по любому.
Mars Science Laboratory
Mars Science Laboratory rover Curiosity exploring the planet mars - facts, information, videos and pictures // marsprogram.jpl.nasa.govЛюбопытен способ посадки ровера:
как с "летающего крана" его спускают.
Вопрос: в чем профит такого способа? Ведь, при этом больший расход топлива будет, по любому.


Это сообщение редактировалось 11.03.2011 в 14:40
Cormorant> Вопрос: в чем профит такого способа?
Возможно - выбрать место приземления?
Возможно - выбрать место приземления?


Cormorant>> Вопрос: в чем профит такого способа?
Полл> Возможно - выбрать место приземления?
Так на платформе тоже самое будет. Еще Армстронг это доказал, "порулив" при посадке "Орла"
Полл> Возможно - выбрать место приземления?
Так на платформе тоже самое будет. Еще Армстронг это доказал, "порулив" при посадке "Орла"
Cormorant> Так на платформе тоже самое будет.
1) Для приземления платформы ей требуются посадочные опоры. В данном случае - их нет.
2) Почва в месте приземления будет не взрыта реактивной струей двигателей. И пыль при посадке не будет подниматся - будет видно, куда садимся.
Это те преимущества, что я вижу - не факт, что разработчики думали так же.
1) Для приземления платформы ей требуются посадочные опоры. В данном случае - их нет.
2) Почва в месте приземления будет не взрыта реактивной струей двигателей. И пыль при посадке не будет подниматся - будет видно, куда садимся.
Это те преимущества, что я вижу - не факт, что разработчики думали так же.
1. Армстронга на MSL незапланировано ")
2. Для того, чтобы при посадке агрегат с гаранте встал ровно и не опрокинулся набок или кверх колёсами. Потому что поставить на ноги его будет некому.
2. Для того, чтобы при посадке агрегат с гаранте встал ровно и не опрокинулся набок или кверх колёсами. Потому что поставить на ноги его будет некому.

Полл> 1) Для приземления платформы ей требуются посадочные опоры. В данном случае - их нет.
Зато потребуется усиление колес ровера.
Полл> 2) Почва в месте приземления будет не взрыта реактивной струей двигателей. И пыль при посадке не будет подниматся - будет видно, куда садимся.
На Луне пыль особо не мешала, как на Марсе не знаю.
Версия принимается.
Зато потребуется усиление колес ровера.
Полл> 2) Почва в месте приземления будет не взрыта реактивной струей двигателей. И пыль при посадке не будет подниматся - будет видно, куда садимся.
На Луне пыль особо не мешала, как на Марсе не знаю.
Версия принимается.
Fakir> 1. Армстронга на MSL незапланировано
Возможность дали - возможность использовал.
Fakir> 2. Для того, чтобы при посадке агрегат с гаранте встал ровно и не опрокинулся набок или кверх колёсами. Потому что поставить на ноги его будет некому.
Автоматическое висение на реактивной струе вроде совсем недавно отработали, поэтому, раньше не этот способ не применяли?
Возможность дали - возможность использовал.
Fakir> 2. Для того, чтобы при посадке агрегат с гаранте встал ровно и не опрокинулся набок или кверх колёсами. Потому что поставить на ноги его будет некому.
Автоматическое висение на реактивной струе вроде совсем недавно отработали, поэтому, раньше не этот способ не применяли?
Cormorant> Так на платформе тоже самое будет. Еще Армстронг это доказал, "порулив" при посадке "Орла"
Он чуть предел топлива не спалил при этом, так что если и доказал он что-то — это что нельзя такое допускать принципиально.
Он чуть предел топлива не спалил при этом, так что если и доказал он что-то — это что нельзя такое допускать принципиально.
au> что нельзя такое допускать принципиально.
Лучше было бы, если бы "Орел" опрокинулся бы при посадке на скалы, или если бы отказавшись от посадки ушел на орбиту?
Лучше было бы, если бы "Орел" опрокинулся бы при посадке на скалы, или если бы отказавшись от посадки ушел на орбиту?

Cormorant> Вопрос: в чем профит такого способа? Ведь, при этом больший расход топлива будет, по любому.
Если вспомнить, как предыдущие роверы сажали - в здоровенном ящике облепленном аирбагами - то топлива возможно меньше по весу надо, чем ящик весить будет.
Почему платформа не снизу - ну тут сложнее сказать... Возможно оно, с ногами и рампой, сложнее получается...
Если вспомнить, как предыдущие роверы сажали - в здоровенном ящике облепленном аирбагами - то топлива возможно меньше по весу надо, чем ящик весить будет.
Почему платформа не снизу - ну тут сложнее сказать... Возможно оно, с ногами и рампой, сложнее получается...
au>> что нельзя такое допускать принципиально.
Полл> Лучше было бы, если бы "Орел" опрокинулся бы при посадке на скалы, или если бы отказавшись от посадки ушел на орбиту?
Место посадки выбирали очень умные люди. И технику эту придумали очень умные люди. Нет ничего хуже, чем в самый ответственный момент, о котором тыщи очень умных людей думали годами и обдумали всё что можно обдумать, начать действовать на глазок, клацать тумблерами и "выбирать" что-то на интуиции, и превращать всё это в казино с джеймсбондом.
Полл> Лучше было бы, если бы "Орел" опрокинулся бы при посадке на скалы, или если бы отказавшись от посадки ушел на орбиту?
Место посадки выбирали очень умные люди. И технику эту придумали очень умные люди. Нет ничего хуже, чем в самый ответственный момент, о котором тыщи очень умных людей думали годами и обдумали всё что можно обдумать, начать действовать на глазок, клацать тумблерами и "выбирать" что-то на интуиции, и превращать всё это в казино с джеймсбондом.
As the Eagle's landing radar acquired the surface, several computer error alarms appeared. The first was a code 1202 alarm and even with their extensive training Armstrong or Aldrin were not aware of what this code meant. However, they promptly received word from CAPCOM in Houston that the alarms were not a concern. The 1202 and 1201 alarms were caused by an executive overflow in the lunar module computer. As described by Buzz Aldrin in the documentary In the Shadow of the Moon, the overflow condition was caused by his own counter-checklist choice of leaving the docking radar on during the landing process, so the computer had to process unnecessary radar data and did not have enough time to execute all tasks, dropping lower-priority ones. Aldrin stated that he did so with the objective of facilitating re-docking with the CM should an abort become necessary, not realizing that it would cause the overflow condition.
When Armstrong noticed they were heading towards a landing area which he believed was unsafe, he took over manual control of the LM, and attempted to find an area which seemed safer. This took longer than expected, and longer than most simulations had taken. For this reason, there was concern from mission control that the LM was running low on fuel. Upon landing, Aldrin and Armstrong believed they had about 40 seconds worth of fuel to left, which included the 20 seconds worth of fuel which had to be saved in the event of an abort. During training, Armstrong had landed the LLTV with less than 15 seconds left on several occasions and he was also confident the LM could survive a straight-down fall from 50 feet (15 m) if needed. Analysis after the mission showed that at touchdown there were 45 to 50 seconds of propellant burn time left
Neil Armstrong - Wikipedia, the free encyclopedia
Neil Alden Armstrong (August 5, 1930 – August 25, 2012) was an American astronaut and the first person to walk on the Moon. He was also an aerospace engineer, naval aviator, test pilot, and university professor. Before becoming an astronaut, Armstrong was an officer in the U.S. Navy and served in the Korean War. After the war, he earned his bachelor's degree at Purdue University and served as a test pilot at the National Advisory Committee for Aeronautics High-Speed Flight Station, now known as the Dryden Flight Research Center, where he logged over 900 flights. // Дальше — en.wikipedia.org
Cormorant> Любопытен способ посадки ровера:
Компутерный мультик про то, как это всё должно сработать:
MSL EDL
Animation of entry/descent/landing sequence of the JPL Mars Science Laboratory, which will launch in fall 2011 and arrive at Mars in 2012.
испытания подвесной системы:
Building Curiosity: Landing System Drop Test
Engineers test the first-of-its-kind landing system on NASA's next Mars rover, Curiosity.
Компутерный мультик про то, как это всё должно сработать:
MSL EDL
Animation of entry/descent/landing sequence of the JPL Mars Science Laboratory, which will launch in fall 2011 and arrive at Mars in 2012.
испытания подвесной системы:
Building Curiosity: Landing System Drop Test
Engineers test the first-of-its-kind landing system on NASA's next Mars rover, Curiosity.
Это сообщение редактировалось 11.03.2011 в 18:45
Трансляция с веб-камеры установленной в JPL, где производится сборка MSL: Curiosity Cam, Ustream.TV: For information about NASA's Curiosity mission, visit: http://www.nasa.gov/msl and http://mars.jpl.nasa.gov/msl Follow the Cur...
au> Место посадки выбирали очень умные люди.
В месте посадки оказалась скала.
au> И технику эту придумали очень умные люди.
"Орел" не мог садится на скалы.
au> Нет ничего хуже, чем в самый ответственный момент, о котором тыщи очень умных людей думали годами и обдумали всё что можно обдумать, начать действовать на глазок, клацать тумблерами и "выбирать" что-то на интуиции, и превращать всё это в казино с джеймсбондом.
Есть. Я не имею в виду "Прогресс", потерянный из-за нерасчетной работы гироскопов. Или В-2, потерянный из-за нерасчетной работы воздушных датчиков.
Я говорю о попадании автоматов в непредусмотренные создателями условия. Поскольку люди - все же не боги, данная беда возникает регулярно. И единственная система управления, сегодня дающая шанс на спасение в подобных случаях - человек.
В месте посадки оказалась скала.
au> И технику эту придумали очень умные люди.
"Орел" не мог садится на скалы.
au> Нет ничего хуже, чем в самый ответственный момент, о котором тыщи очень умных людей думали годами и обдумали всё что можно обдумать, начать действовать на глазок, клацать тумблерами и "выбирать" что-то на интуиции, и превращать всё это в казино с джеймсбондом.
Есть. Я не имею в виду "Прогресс", потерянный из-за нерасчетной работы гироскопов. Или В-2, потерянный из-за нерасчетной работы воздушных датчиков.
Я говорю о попадании автоматов в непредусмотренные создателями условия. Поскольку люди - все же не боги, данная беда возникает регулярно. И единственная система управления, сегодня дающая шанс на спасение в подобных случаях - человек.
Полл> И единственная система управления, сегодня дающая шанс на спасение в подобных случаях - человек.
человек в подобных ситуациях часто тоже не блещет... И не факт, что он будет лучше нынешней автоматики...
человек в подобных ситуациях часто тоже не блещет... И не факт, что он будет лучше нынешней автоматики...
Dem_anywhere> человек в подобных ситуациях часто тоже не блещет...
Вся программа "Апполо" тебя опровергает.
Dem_anywhere> И не факт, что он будет лучше нынешней автоматики...
Факт - современная автоматика как базировалась на алгоритмах, разработанных кибернетиками 50-60 гг, так и базируется. Может, когда модели нечеткой логики смогут в металле воплотить - что-то и изменится. Жаль только жить в эту пору чудесную...
Вся программа "Апполо" тебя опровергает.
Dem_anywhere> И не факт, что он будет лучше нынешней автоматики...
Факт - современная автоматика как базировалась на алгоритмах, разработанных кибернетиками 50-60 гг, так и базируется. Может, когда модели нечеткой логики смогут в металле воплотить - что-то и изменится. Жаль только жить в эту пору чудесную...
Полл>> И единственная система управления, сегодня дающая шанс на спасение в подобных случаях - человек.
Dem_anywhere> человек в подобных ситуациях часто тоже не блещет... И не факт, что он будет лучше нынешней автоматики...
ВСЕ "Аполлоны" сели благополучно.
До того, ЕМНИС, несколько американских лунных АМС побились при посадке.
Dem_anywhere> человек в подобных ситуациях часто тоже не блещет... И не факт, что он будет лучше нынешней автоматики...
ВСЕ "Аполлоны" сели благополучно.
До того, ЕМНИС, несколько американских лунных АМС побились при посадке.
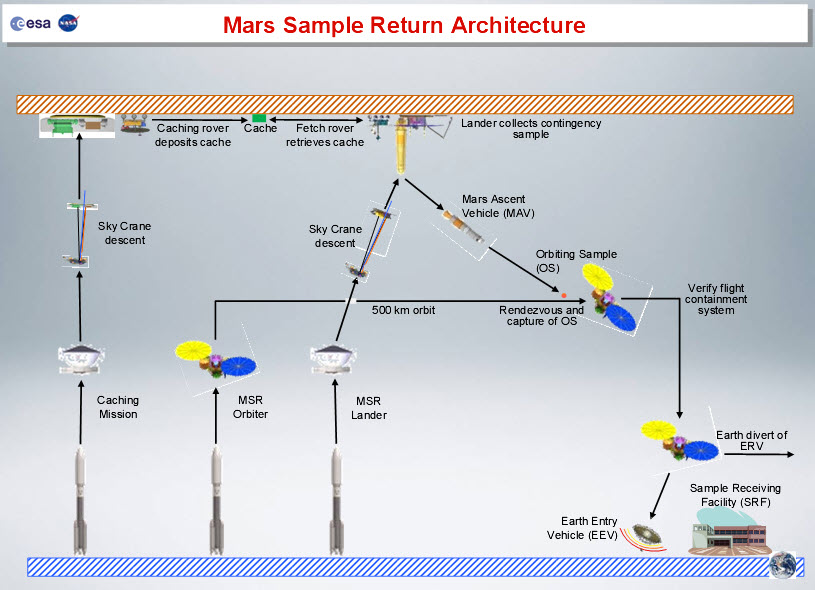
Красочная презентация по сабжу, а также по дальнейшим планам (после MSL).
Понравилась схема миссии по доставке марсианского грунта.
Что бы нашем в этом ключе наконец не подумать... И вообще огорчает крайне низкая встречаемость концепции многопуска. А тут - приятное исключение.
Что бы нашем в этом ключе наконец не подумать... И вообще огорчает крайне низкая встречаемость концепции многопуска. А тут - приятное исключение.
Прикреплённые файлы:

Способ посадки как любопытен, так и пугающ! Столько новых сущностей добавлено, и каждая имеет свою не нулевую вероятность отказа! Баки с топливом, топливопроводы, двигатели, автоматика управление этим хозяйством, затем лебёдки с тросами и кабелями и автоматика управления ими, система отстрела этих тросов и кабелей! И это только то, что на виду. Двигатель не сработал (хотя бы один!) или сработал не штатно, не сработала лебёдка (хотя бы один из тросов!), не сработал отстрел троса (хотя бы одного!) и так далее. Для чего всё это?! Чем плохи парашюты? Чем плоха менее сложная обыкновенная платформа несущая на себе ровер и выдающая простой тормозной импульс (если с парашютами ну совсем-присовсем никак!). Такая же система (которая предлагается авторами) оправдана только лишь в случае необходимости активного маневрирования на последнем этапе посадки в место с совершенно жутким рельефом местности. Это у них так и планируется?! То есть они готовы пожертвовать надёжностью миссии только из-за того, что не готовы выбрать менее опасное место посадки, для которого не надо городить такую страшенную систему?! Странно как-то всё это и печально...
Cormorant> Вопрос: в чем профит такого способа? Ведь, при этом больший расход топлива будет, по любому.
Насколько я понимаю, тут во многом определяющим является необходимость исключить загрязнение места посадки. Глупо посылать на Марс ровер размером с "запорожец", который бы потом занимался "изучением" привезенного с собой же дерьма.
Насколько я понимаю, тут во многом определяющим является необходимость исключить загрязнение места посадки. Глупо посылать на Марс ровер размером с "запорожец", который бы потом занимался "изучением" привезенного с собой же дерьма.
ChiefPilot> ...
Парашуты и так есть, но в марсианской атмосфере они только предварительное торможение дать могут.
Т.е. движки всё равно надо.
Т.е. фактически разница - кран вместо тяжёлой платформы с раздвижными ногами и аппарелью.
И не факт, что кран ненадёжней получится.
А вот стабилизация движками при их нахождении снизу - сложнее. Кирдыкнуться запросто...
Парашуты и так есть, но в марсианской атмосфере они только предварительное торможение дать могут.
Т.е. движки всё равно надо.
Т.е. фактически разница - кран вместо тяжёлой платформы с раздвижными ногами и аппарелью.
И не факт, что кран ненадёжней получится.
А вот стабилизация движками при их нахождении снизу - сложнее. Кирдыкнуться запросто...
Dem_anywhere> Парашуты и так есть, но в марсианской атмосфере они только предварительное торможение дать могут.
Ну, чисто теоретически, всё зависит от площади парашюта. Хотя я прекрасно понимаю, что, возможно, при тамошних условиях парашюта нужно столько, что страшно подумать, какая масса материала получится!
Dem_anywhere> Т.е. движки всё равно надо.
Dem_anywhere> Т.е. фактически разница - кран вместо тяжёлой платформы с раздвижными ногами и аппарелью.
Dem_anywhere> И не факт, что кран ненадёжней получится.
Dem_anywhere> А вот стабилизация движками при их нахождении снизу - сложнее. Кирдыкнуться запросто...
Да, это, видимо, так. Только вот почему-то интуитивно чувствуется, что аппарель менее сложное и более надёжное устройство! Вот почему, например, луноходы не сажали так, как сейчас предлагается сажать вот этот ровер? А ведь это, согласитесь, достаточно аналогичная операция была? Вот ведь сильно надеюсь, что не потому же, что не могли тогда сделать автоматику управления зависанием подобного небесного крана?! А быть может таки потому, что такой вот по-сути "активный парашют" (парашют с двигателями) это сон разума (именно в смысле большей сложности и следовательно меньшей надёжности)?
Ну, чисто теоретически, всё зависит от площади парашюта. Хотя я прекрасно понимаю, что, возможно, при тамошних условиях парашюта нужно столько, что страшно подумать, какая масса материала получится!
Dem_anywhere> Т.е. движки всё равно надо.
Dem_anywhere> Т.е. фактически разница - кран вместо тяжёлой платформы с раздвижными ногами и аппарелью.
Dem_anywhere> И не факт, что кран ненадёжней получится.
Dem_anywhere> А вот стабилизация движками при их нахождении снизу - сложнее. Кирдыкнуться запросто...
Да, это, видимо, так. Только вот почему-то интуитивно чувствуется, что аппарель менее сложное и более надёжное устройство! Вот почему, например, луноходы не сажали так, как сейчас предлагается сажать вот этот ровер? А ведь это, согласитесь, достаточно аналогичная операция была? Вот ведь сильно надеюсь, что не потому же, что не могли тогда сделать автоматику управления зависанием подобного небесного крана?! А быть может таки потому, что такой вот по-сути "активный парашют" (парашют с двигателями) это сон разума (именно в смысле большей сложности и следовательно меньшей надёжности)?
ChiefPilot> Ну, чисто теоретически, всё зависит от площади парашюта. Хотя я прекрасно понимаю, что, возможно, при тамошних условиях парашюта нужно столько, что страшно подумать, какая масса материала получится!
Плотность марсианской атмосферы у поверхности соответствует плотности земной атмосферы на высоте 30 - 40 км. Всё на что способен в такой атмосфере парашют - это затормозить СА с гиперзвуковой скорости до дозвуковой. Далее только двигателями.
ChiefPilot> Да, это, видимо, так. Только вот почему-то интуитивно чувствуется, что аппарель менее сложное и более надёжное устройство!
Аппарель и механизм её раскладки имеют ненулевой вес. К тому же добавляется необходимость наличия посадочного шасси, то же с ненулевым весом. В совокупности это поболее чем у лебёдки с тросами. Как антибонус к посадке на шасси - необходимость увеличения прочности для восприятия динамических нагрузок от собственного веса и веса ровера, плюс повышенная ударостойкость топливных баков и топливной арматуры.
ChiefPilot> Вот почему, например, луноходы не сажали так, как сейчас предлагается сажать вот этот ровер? А ведь это, согласитесь, достаточно аналогичная операция была? Вот ведь сильно надеюсь, что не потому же, что не могли тогда сделать автоматику управления зависанием подобного небесного крана?!
Конструкция посадочной ступени с шасси и аппарелями проще в отработке алгоритмов управления. Ну и привычней. По всей видимости в те годы это было решающим условием.
ChiefPilot> А быть может таки потому, что такой вот по-сути "активный парашют" (парашют с двигателями) это сон разума (именно в смысле большей сложности и следовательно меньшей надёжности)?
Dem_anywhere> А вот стабилизация движками при их нахождении снизу - сложнее.
Для осуществления стабилизации жесткой конструкции не имеет значения место установки двигателей. Сложность конкретно в этом случае - тросы, гибкая связь, из-за которой возможна раскачка при излишне резких маневрах. Но это лечится усложнением соответствующих алгоритмов управления.
P.S.: Данный аппарат уже получил собственное имя - "Curiosity" (Любопытный)
Плотность марсианской атмосферы у поверхности соответствует плотности земной атмосферы на высоте 30 - 40 км. Всё на что способен в такой атмосфере парашют - это затормозить СА с гиперзвуковой скорости до дозвуковой. Далее только двигателями.
ChiefPilot> Да, это, видимо, так. Только вот почему-то интуитивно чувствуется, что аппарель менее сложное и более надёжное устройство!
Аппарель и механизм её раскладки имеют ненулевой вес. К тому же добавляется необходимость наличия посадочного шасси, то же с ненулевым весом. В совокупности это поболее чем у лебёдки с тросами. Как антибонус к посадке на шасси - необходимость увеличения прочности для восприятия динамических нагрузок от собственного веса и веса ровера, плюс повышенная ударостойкость топливных баков и топливной арматуры.
ChiefPilot> Вот почему, например, луноходы не сажали так, как сейчас предлагается сажать вот этот ровер? А ведь это, согласитесь, достаточно аналогичная операция была? Вот ведь сильно надеюсь, что не потому же, что не могли тогда сделать автоматику управления зависанием подобного небесного крана?!
Конструкция посадочной ступени с шасси и аппарелями проще в отработке алгоритмов управления. Ну и привычней. По всей видимости в те годы это было решающим условием.
ChiefPilot> А быть может таки потому, что такой вот по-сути "активный парашют" (парашют с двигателями) это сон разума (именно в смысле большей сложности и следовательно меньшей надёжности)?
Dem_anywhere> А вот стабилизация движками при их нахождении снизу - сложнее.
Для осуществления стабилизации жесткой конструкции не имеет значения место установки двигателей. Сложность конкретно в этом случае - тросы, гибкая связь, из-за которой возможна раскачка при излишне резких маневрах. Но это лечится усложнением соответствующих алгоритмов управления.
P.S.: Данный аппарат уже получил собственное имя - "Curiosity" (Любопытный)
Реклама Google — средство выживания форумов :)
Taras66> Аппарель и механизм её раскладки имеют ненулевой вес. К тому же добавляется необходимость наличия посадочного шасси, то же с ненулевым весом.
Плюс собственно платформа, на которой аппарат стоять будет.
Taras66> P.S.: Данный аппарат уже получил собственное имя - "Curiosity" (Любопытный)
"Курьёзный"
Плюс собственно платформа, на которой аппарат стоять будет.
Taras66> P.S.: Данный аппарат уже получил собственное имя - "Curiosity" (Любопытный)
"Курьёзный"
Copyright © Balancer 1997..2023
Создано 11.03.2011
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 11.03.2011
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}