 Бывший генералиссимус
Бывший генералиссимус

 инфо
инфо инструменты
инструменты Xan
Xan




 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:

Начинаю игры с новым гироскопом - SCC1300-D02.
Его разработала и производила фирма VTI Technologies, но её купила фирма Murata, и теперь он выпускается под брэндом последней. Обещают стабильность на уровне 1 градус в час. Не верю") Паяю новый макет с трёхвольтовой сигнализацией.
Паяю новый макет с трёхвольтовой сигнализацией.
Сергей UA9UQB сделал для меня плату и спаял её:
Его разработала и производила фирма VTI Technologies, но её купила фирма Murata, и теперь он выпускается под брэндом последней. Обещают стабильность на уровне 1 градус в час. Не верю
Паяю новый макет с трёхвольтовой сигнализацией.Сергей UA9UQB сделал для меня плату и спаял её:


Б.г.> Начинаю игры с новым гироскопом - SCC1300-D02.
Чёт-та не впечатляет.
Судя по тому, что удалость прочесть в рекламе.
Там нормальный док есть?
Ну и это для каких-то комнатных игрушек, судя по диапазонам.
ЗЫ
Кажется, доки нашёл...
Почитал.
Линейный эффект обещают не лучше, чем у AD.
80 градусов ошибки при разгоне до орбитальной.
Чёт-та не впечатляет.
Судя по тому, что удалость прочесть в рекламе.
Там нормальный док есть?
Ну и это для каких-то комнатных игрушек, судя по диапазонам.
ЗЫ
Кажется, доки нашёл...
Почитал.
Линейный эффект обещают не лучше, чем у AD.
80 градусов ошибки при разгоне до орбитальной.

Это сообщение редактировалось 03.04.2015 в 15:05
Б.г.>> Начинаю игры с новым гироскопом - SCC1300-D02.
Xan> Ну и это для каких-то комнатных игрушек, судя по диапазонам.
По каким диапазонам? акселерометра? да и фиг с ним, зато гиродатчик постабильнее. Температурный диапазон хороший. Есть версия -D04 с большими диапазонами ускорений и угловых скоростей, но мне нравится эта.
Xan> Кажется, доки нашёл...
Тут нашёл?
Xan> Почитал.
Xan> Линейный эффект обещают не лучше, чем у AD.
Xan> 80 градусов ошибки при разгоне до орбитальной.
это мы попробуем скомпенсировать оказалось, что один из моих однокашников по институту как раз инерциалками на базе МЕМС занимается. Ух, какие у них калибровочные стенды!!! я обзавидовался...
Xan> Ну и это для каких-то комнатных игрушек, судя по диапазонам.
По каким диапазонам? акселерометра? да и фиг с ним, зато гиродатчик постабильнее. Температурный диапазон хороший. Есть версия -D04 с большими диапазонами ускорений и угловых скоростей, но мне нравится эта.
Xan> Кажется, доки нашёл...
Тут нашёл?
Xan> Почитал.
Xan> Линейный эффект обещают не лучше, чем у AD.
Xan> 80 градусов ошибки при разгоне до орбитальной.
это мы попробуем скомпенсировать
оказалось, что один из моих однокашников по институту как раз инерциалками на базе МЕМС занимается. Ух, какие у них калибровочные стенды!!! я обзавидовался...
Xan>> Ну и это для каких-то комнатных игрушек, судя по диапазонам.
Б.г.> По каким диапазонам? акселерометра? да и фиг с ним, зато гиродатчик постабильнее.
У гиры может быть мало диапазона.
Ну, это я к своему примеряю — если делать активную стабилизацию (не вращением), то скорости рысканья могут быть большими, так как момент инерции у последних ступеней маленький.
Б.г.> Температурный диапазон хороший.
Шикарный. Аж слишком!
Б.г.> Тут нашёл?
Да, scc1300_d02 revd.pdf
Б.г.> это мы попробуем скомпенсировать
Один градус ошибки по тангажу — ±60 км эллиптичности.
И время жизни в полтора раза меньше.
Это если прицеливаться на чисто круговую.
Кстати, как ты собираешься ДТП избегать?
Там ниже 400 км больше сотни живых летают. (На дохлых наплевать, конечно.)
Страховку такую продают?
Б.г.> По каким диапазонам? акселерометра? да и фиг с ним, зато гиродатчик постабильнее.
У гиры может быть мало диапазона.
Ну, это я к своему примеряю — если делать активную стабилизацию (не вращением), то скорости рысканья могут быть большими, так как момент инерции у последних ступеней маленький.
Б.г.> Температурный диапазон хороший.
Шикарный. Аж слишком!
Б.г.> Тут нашёл?
Да, scc1300_d02 revd.pdf
Б.г.> это мы попробуем скомпенсировать
Один градус ошибки по тангажу — ±60 км эллиптичности.
И время жизни в полтора раза меньше.
Это если прицеливаться на чисто круговую.
Кстати, как ты собираешься ДТП избегать?
Там ниже 400 км больше сотни живых летают. (На дохлых наплевать, конечно.)
Страховку такую продают?
Xan>>> Ну и это для каких-то комнатных игрушек, судя по диапазонам.
Б.г.>> По каким диапазонам? акселерометра? да и фиг с ним, зато гиродатчик постабильнее.
Xan> У гиры может быть мало диапазона.
Xan> Ну, это я к своему примеряю — если делать активную стабилизацию (не вращением), то скорости рысканья могут быть большими, так как момент инерции у последних ступеней маленький.
Вообще-то, у ДУСов, используемых в реальных ракетах, диапазон обычно 10 градусов в секунду, а не 100. Наши проекты намного миниатюрнее, но, всё равно, 100 градусов в секунду не по крену - это почти гарантированное разрушение.
Б.г.>> это мы попробуем скомпенсировать
Xan> Один градус ошибки по тангажу — ±60 км эллиптичности.
а ± 5% от полного импульса последней ступени сколько дадут? Нет, целиться в точно круговую нельзя никак.
Xan> Кстати, как ты собираешься ДТП избегать?
Xan> Там ниже 400 км больше сотни живых летают. (На дохлых наплевать, конечно.)
Xan> Страховку такую продают?
Ну, за это отвечают правильные баллистики. И мы к ним обратимся, естественно
Б.г.>> По каким диапазонам? акселерометра? да и фиг с ним, зато гиродатчик постабильнее.
Xan> У гиры может быть мало диапазона.
Xan> Ну, это я к своему примеряю — если делать активную стабилизацию (не вращением), то скорости рысканья могут быть большими, так как момент инерции у последних ступеней маленький.
Вообще-то, у ДУСов, используемых в реальных ракетах, диапазон обычно 10 градусов в секунду, а не 100. Наши проекты намного миниатюрнее, но, всё равно, 100 градусов в секунду не по крену - это почти гарантированное разрушение.
Б.г.>> это мы попробуем скомпенсировать
Xan> Один градус ошибки по тангажу — ±60 км эллиптичности.
а ± 5% от полного импульса последней ступени сколько дадут? Нет, целиться в точно круговую нельзя никак.
Xan> Кстати, как ты собираешься ДТП избегать?
Xan> Там ниже 400 км больше сотни живых летают. (На дохлых наплевать, конечно.)
Xan> Страховку такую продают?
Ну, за это отвечают правильные баллистики. И мы к ним обратимся, естественно

Б.г.> а ± 5% от полного импульса последней ступени сколько дадут? Нет, целиться в точно круговую нельзя никак.
+5% можно, а -5% низзя!
Ну так надо поставить датчик "уровня топлива" и ориентируясь на него вилять ракетой, чтоб лишний импульс потратить в стороны, а не вперёд.
Акселерометр можно очень хорошо прокалибровать дома, так что ошибка будет маленькие доли процента.
Xan>> Там ниже 400 км больше сотни живых летают. (На дохлых наплевать, конечно.)
И на каждые 50 км высоты население увеличивается в полтора раза.
Так что лишние 5% импульса сильно увеличат вероятность.
Ну и радиационные пояса начнёшь цеплять. Бытовой электроникой.
Xan>> Страховку такую продают?
Б.г.> Ну, за это отвечают правильные баллистики. И мы к ним обратимся, естественно
В моей стране максимальный штраф за "управление без прав" $400.
Что просто смешно на фоне остальных расходов.
Но в случае ДТП — обещают все деньги содрать, все миллионы.
Если продавать последние штаны, то это целый товарный поезд штанов получится!!!
Баллистики тут не помогут — ты не сможет вывести точно туда, куда они показали.
А что у тебя с временем жизни на орбите?
+5% можно, а -5% низзя!
Ну так надо поставить датчик "уровня топлива" и ориентируясь на него вилять ракетой, чтоб лишний импульс потратить в стороны, а не вперёд.
Акселерометр можно очень хорошо прокалибровать дома, так что ошибка будет маленькие доли процента.
Xan>> Там ниже 400 км больше сотни живых летают. (На дохлых наплевать, конечно.)
И на каждые 50 км высоты население увеличивается в полтора раза.
Так что лишние 5% импульса сильно увеличат вероятность.
Ну и радиационные пояса начнёшь цеплять. Бытовой электроникой.
Xan>> Страховку такую продают?
Б.г.> Ну, за это отвечают правильные баллистики. И мы к ним обратимся, естественно
В моей стране максимальный штраф за "управление без прав" $400.
Что просто смешно на фоне остальных расходов.
Но в случае ДТП — обещают все деньги содрать, все миллионы.
Если продавать последние штаны, то это целый товарный поезд штанов получится!!!
Баллистики тут не помогут — ты не сможет вывести точно туда, куда они показали.
А что у тебя с временем жизни на орбите?
Xan> А что у тебя с временем жизни на орбите?
Я считаю, что для первого запуска оптимальное время жизни - сутки-двое. Минимальное - чтоб заметила американская ССКП, около 9 витков.
Соответственно, перигей не выше 170±10 км. Апогей - ну, какой получится.
Я считаю, что для первого запуска оптимальное время жизни - сутки-двое. Минимальное - чтоб заметила американская ССКП, около 9 витков.
Соответственно, перигей не выше 170±10 км. Апогей - ну, какой получится.
Б.г.> чтоб заметила американская ССКП
А это кто такая?
Б.г.> Соответственно, перигей не выше 170±10 км. Апогей - ну, какой получится.
У меня для спутника n-prize с растопыренными солнечными батареями время жизни на круговой 170 км получается 0.9 витка.
Маловато!!!
330 км — неделя.
А это кто такая?
Б.г.> Соответственно, перигей не выше 170±10 км. Апогей - ну, какой получится.
У меня для спутника n-prize с растопыренными солнечными батареями время жизни на круговой 170 км получается 0.9 витка.
Маловато!!!
330 км — неделя.
Б.г.>> Начинаю игры с новым гироскопом - SCC1300-D02.
Пока новый макет не готов, продолжаю игры с ADIS16300.
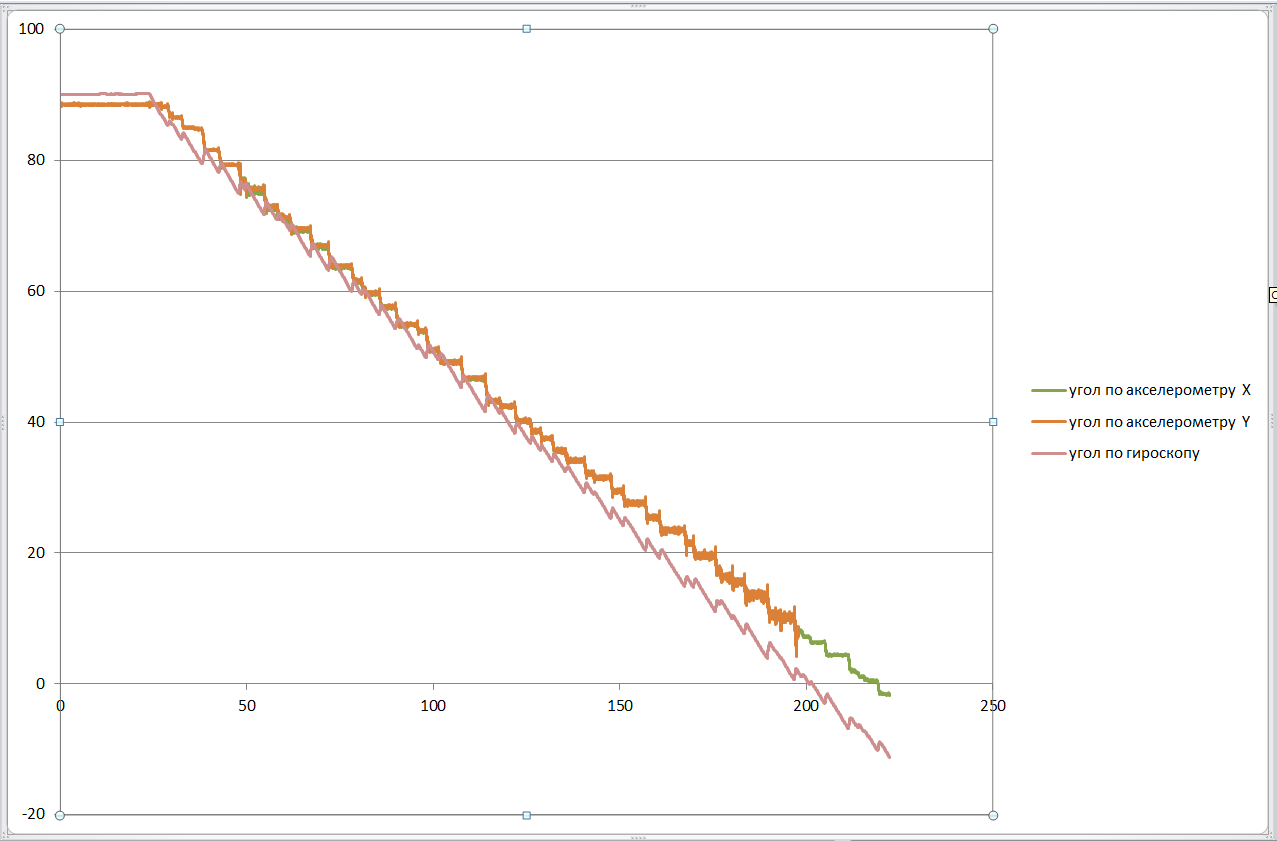
Сегодня он у меня на столе отработал программу угла тангажа
К сожалению, код автоматической коррекции зоны нечувствительности я поломал, поэтому разворот по тангажу происходил не равномерно, а рывками. Но интересно не это. На графике есть угол тангажа по "счислению", и по акселерометрам, как проекции "же" на соответствующие оси. Видно, что до 120-й где-то секунды они находятся в хорошем соответствии, а дальше начинают расходиться.
Пока новый макет не готов, продолжаю игры с ADIS16300.
Сегодня он у меня на столе отработал программу угла тангажа
К сожалению, код автоматической коррекции зоны нечувствительности я поломал, поэтому разворот по тангажу происходил не равномерно, а рывками. Но интересно не это. На графике есть угол тангажа по "счислению", и по акселерометрам, как проекции "же" на соответствующие оси. Видно, что до 120-й где-то секунды они находятся в хорошем соответствии, а дальше начинают расходиться.
Прикреплённые файлы:
Б.г.> Сегодня он у меня на столе отработал программу угла тангажа
Это моторчик подкручивал под заданный во времени угол?
Это моторчик подкручивал под заданный во времени угол?
Б.г.> Сергей UA9UQB сделал для меня плату и спаял её:
А зачем заливка сеточкой? Плата сильно низкочастотная, меньше 100кГц?
А зачем заливка сеточкой? Плата сильно низкочастотная, меньше 100кГц?

Sandro> А зачем заливка сеточкой?
Возможно, это для лазерно-утюжной технологии!
Sandro> Плата сильно низкочастотная, меньше 100кГц?
Никак не связано.
Возможно, это для лазерно-утюжной технологии!
Sandro> Плата сильно низкочастотная, меньше 100кГц?
Никак не связано.
Sandro>> А зачем заливка сеточкой?
Xan> Возможно, это для лазерно-утюжной технологии!
Сплошная ничуть не хуже ИМХО.
Sandro>> Плата сильно низкочастотная, меньше 100кГц?
Xan> Никак не связано.
Очень даже связано. Имел дело с платой на много мегагерц, где была эта вот сеточка. Пришлось переделывать по-нормальному.
Матерные выражения насчёт этой истории добавлять по вкусу.
Xan> Возможно, это для лазерно-утюжной технологии!
Сплошная ничуть не хуже ИМХО.
Sandro>> Плата сильно низкочастотная, меньше 100кГц?
Xan> Никак не связано.
Очень даже связано. Имел дело с платой на много мегагерц, где была эта вот сеточка. Пришлось переделывать по-нормальному.
Матерные выражения насчёт этой истории добавлять по вкусу.
Б.г.>> Сегодня он у меня на столе отработал программу угла тангажа
Xan> Это моторчик подкручивал под заданный во времени угол?
Именно. Буду наводить статистику. А ещё буду пытать компенсацию линейного ускорения - похоже, "же" при повороте смещает ноль и вносит систематическую ошибку.
Xan> Это моторчик подкручивал под заданный во времени угол?
Именно. Буду наводить статистику. А ещё буду пытать компенсацию линейного ускорения - похоже, "же" при повороте смещает ноль и вносит систематическую ошибку.
Sandro>>> А зачем заливка сеточкой?
Xan>> Возможно, это для лазерно-утюжной технологии!
Sandro> Сплошная ничуть не хуже ИМХО.
Сергей говорит - плохо получается сплошная заливка на лазерном принтере. У меня не получается никак, поэтому я ему доверился
Sandro>>> Плата сильно низкочастотная, меньше 100кГц?
На SPI частота довольно большая, в данный момент 576 кГц тактовая.
Xan>> Никак не связано.
Sandro> Очень даже связано. Имел дело с платой на много мегагерц, где была эта вот сеточка. Пришлось переделывать по-нормальному.
Sandro> Матерные выражения насчёт этой истории добавлять по вкусу.
понятно, что радиоканальные платы с сеточкой делать не стоит. но тут вряд ли это критично. К тому же, на другой стороне сплошной земляной полигон с дырками под разъём.
Xan>> Возможно, это для лазерно-утюжной технологии!
Sandro> Сплошная ничуть не хуже ИМХО.
Сергей говорит - плохо получается сплошная заливка на лазерном принтере. У меня не получается никак, поэтому я ему доверился
Sandro>>> Плата сильно низкочастотная, меньше 100кГц?
На SPI частота довольно большая, в данный момент 576 кГц тактовая.
Xan>> Никак не связано.
Sandro> Очень даже связано. Имел дело с платой на много мегагерц, где была эта вот сеточка. Пришлось переделывать по-нормальному.
Sandro> Матерные выражения насчёт этой истории добавлять по вкусу.
понятно, что радиоканальные платы с сеточкой делать не стоит. но тут вряд ли это критично. К тому же, на другой стороне сплошной земляной полигон с дырками под разъём.
Б.г.> Сергей говорит - плохо получается сплошная заливка на лазерном принтере. У меня не получается никак, поэтому я ему доверился
Бывает разным образом. Часть принтеров может заливать сплошняком. Часть — нет. Причём новые чаще не умеют, насколько я в курсе.
Бывает разным образом. Часть принтеров может заливать сплошняком. Часть — нет. Причём новые чаще не умеют, насколько я в курсе.
Б.г.>> Сегодня он у меня на столе отработал программу угла тангажа ")
Xan> Это моторчик подкручивал под заданный во времени угол?
выложили видео.
нечаянно оно получилось ускоренным в 2 раза, но это и к лучшему.
P.S. Если приглядеться, видно, как на 34й или 35й секунде видео включается красный светодиод и освещает провода. Сам светодиод не виден - закрыт от камеры платой солнечного датчика. Этот светодиод сигнализирует о том, что калибровка закончена и моторы включены - но движение не начинается ещё 10 секунд, имитируя "вертикальный подъём".
Прототип системы управления
Испытание прототипа системы управления сверхлегкой ракеты-носителя. Сначала происходит аналог предстартовых операций - гироскоп 30 секунд калибруется для определения нуля угловой скорости. Нуль дрейфует весьма заметно, поэтому калибровку приходится повторять перед каждой имитацией старта. Затем идёт 10 секунд вертикального подъёма.
Xan> Это моторчик подкручивал под заданный во времени угол?
выложили видео.
нечаянно оно получилось ускоренным в 2 раза, но это и к лучшему.
P.S. Если приглядеться, видно, как на 34й или 35й секунде видео включается красный светодиод и освещает провода. Сам светодиод не виден - закрыт от камеры платой солнечного датчика. Этот светодиод сигнализирует о том, что калибровка закончена и моторы включены - но движение не начинается ещё 10 секунд, имитируя "вертикальный подъём".
Прототип системы управления
Испытание прототипа системы управления сверхлегкой ракеты-носителя. Сначала происходит аналог предстартовых операций - гироскоп 30 секунд калибруется для определения нуля угловой скорости. Нуль дрейфует весьма заметно, поэтому калибровку приходится повторять перед каждой имитацией старта. Затем идёт 10 секунд вертикального подъёма.
Это сообщение редактировалось 09.04.2015 в 14:39
Б.г.>>> Сегодня он у меня на столе отработал программу угла тангажа
Xan>> Это моторчик подкручивал под заданный во времени угол?
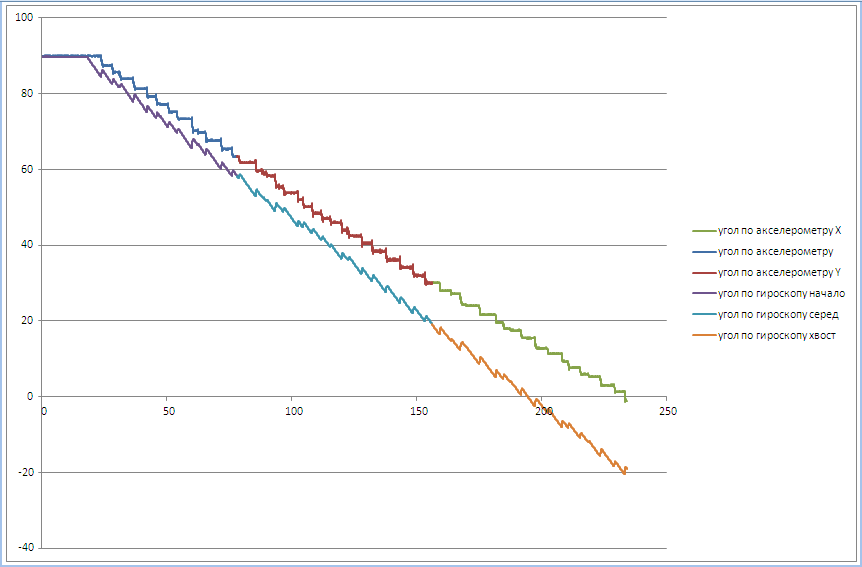
более чисто поставленные опыты показывают, что это не случайная, а систематическая ошибка. Нижеприведённая картинка очень типична - разница в 20+-2 градусов набегает у меня к концу каждого испытания. Но все систематические ошибки можно либо убрать, либо учесть.
Xan>> Это моторчик подкручивал под заданный во времени угол?
более чисто поставленные опыты показывают, что это не случайная, а систематическая ошибка. Нижеприведённая картинка очень типична - разница в 20+-2 градусов набегает у меня к концу каждого испытания. Но все систематические ошибки можно либо убрать, либо учесть.
Прикреплённые файлы:

Б.г.> более чисто поставленные опыты показывают, что это не случайная, а систематическая ошибка. Нижеприведённая картинка очень типична - разница в 20+-2 градусов набегает у меня к концу каждого испытания.
А реальный-то угол какой?
А реальный-то угол какой?
Б.г.>> более чисто поставленные опыты показывают, что это не случайная, а систематическая ошибка. Нижеприведённая картинка очень типична - разница в 20+-2 градусов набегает у меня к концу каждого испытания.
Massaraksh> А реальный-то угол какой?
Там в ADIS16300 есть трёхосный акселерометр, и он работает инклинометром - вот график "угла по акселерометру" - он реальный, и программа считается оконченной, когда он достигает нуля. Этот угол - реальный, а счислённый гироскопом оказывается на 20 градусов больше, т.е. не 90, а все 110 градусов.
Massaraksh> А реальный-то угол какой?
Там в ADIS16300 есть трёхосный акселерометр, и он работает инклинометром - вот график "угла по акселерометру" - он реальный, и программа считается оконченной, когда он достигает нуля. Этот угол - реальный, а счислённый гироскопом оказывается на 20 градусов больше, т.е. не 90, а все 110 градусов.
Б.г.> Но все систематические ошибки можно либо убрать, либо учесть.
Если точно знать их причины.
Если точно знать их причины.
Б.г.> выложили видео.
Красота!
А я всё никак не нарисую плату датчиков (но уже начал).
Да тут ещё захотелось изменения в электронике:
Вместо одной главной головы, от которой идут провода ко всем остальным ступеням (к рулевым машинкам и зажиганиям) придумалось сделать маленькие мозжечки в каждую ступень и цифровую магистраль (RS485) вдоль всей ракеты.
Экономия на проводах и разъёмах.
Б.г.> платой солнечного датчика
А что за датчик?
Красота!
А я всё никак не нарисую плату датчиков (но уже начал).
Да тут ещё захотелось изменения в электронике:
Вместо одной главной головы, от которой идут провода ко всем остальным ступеням (к рулевым машинкам и зажиганиям) придумалось сделать маленькие мозжечки в каждую ступень и цифровую магистраль (RS485) вдоль всей ракеты.
Экономия на проводах и разъёмах.
Б.г.> платой солнечного датчика
А что за датчик?
Б.г.>> платой солнечного датчика
Xan> А что за датчик?
ADNS2051.
Подключён к SPI через модуль-согласователь на 74HC32, двух резисторах и двух диодах. Для повышения помехоустойчивости взял германиевые Д311А. На них прямое падение меньше всего, при достаточном быстродействии.
Согласователь понадобился затем, что у мышиных микросхем данные туда и обратно идут по одной линии, а у SPI - по разным, но TWI (атмеловское название для I2C) не подходит им по логике.
Xan> А что за датчик?
ADNS2051.
Подключён к SPI через модуль-согласователь на 74HC32, двух резисторах и двух диодах. Для повышения помехоустойчивости взял германиевые Д311А. На них прямое падение меньше всего, при достаточном быстродействии.
Согласователь понадобился затем, что у мышиных микросхем данные туда и обратно идут по одной линии, а у SPI - по разным, но TWI (атмеловское название для I2C) не подходит им по логике.
Б.г.> у мышиных микросхем
Понял.
Я от солнечного 2D отказался, собираюсь делать 1D.
Остальное магнитным.
Б.г.> взял германиевые Д311А.
Хорошо тебе, можно огромные диоды ставить, аж с двумя ручками для переноски!
А у меня уже соик-8 половину платы занимает!!!
Понял.
Я от солнечного 2D отказался, собираюсь делать 1D.
Остальное магнитным.
Б.г.> взял германиевые Д311А.
Хорошо тебе, можно огромные диоды ставить, аж с двумя ручками для переноски!
А у меня уже соик-8 половину платы занимает!!!
Реклама Google — средство выживания форумов :)
Xan> Вместо одной главной головы, от которой идут провода ко всем остальным ступеням (к рулевым машинкам и зажиганиям) придумалось сделать маленькие мозжечки в каждую ступень
ATiny восмивыводную. Если нужен таки мозжечок. А так — есть и другие схемки, попроще и подешевле.
Например: http://www.nxp.com/documents/data_sheet/PCF8574.pdf
Xan> и цифровую магистраль (RS485) вдоль всей ракеты.
А почему не I2C? Стандартное железо под неё сейчас гораздо проще добыть.
ATiny восмивыводную. Если нужен таки мозжечок. А так — есть и другие схемки, попроще и подешевле.
Например: http://www.nxp.com/documents/data_sheet/PCF8574.pdf
Xan> и цифровую магистраль (RS485) вдоль всей ракеты.
А почему не I2C? Стандартное железо под неё сейчас гораздо проще добыть.
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}