 Xan
Xan

 инфо
инфо инструменты
инструменты Sandro
Sandro

 pinko
pinko



 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
Sandro> ATiny восмивыводную.
Я только пики знаю.
В качестве мозгов — 44-пиновый МК 10*10 мм размером.
И вот по сравнению с ним ADM3483 в SOIC-8 — здоровенная дура!")
Ну и доступный лабаз продаёт резюки и кондюры не меньше 0603.
Так что всё равно сильно размер платы не уменьшить.
На мой взгляд, проще использовать единственный тип МК, в котором много избыточных возможностей. Чем под каждый случай подбирать оптимальный тип.
Надо бежать по пути наименьшего сопротивления, а не оптимизировать стоимость компонентов.
У меня ж не серия!!!
Sandro> А почему не I2C? Стандартное железо под неё сейчас гораздо проще добыть.
Да у меня с ней почти ничего и нет. Всё, что есть, помещается на одной плате.
А вот протянуть её на пару метров — это, на мой взгляд, плохая идея для полевой аппаратуры.
С RS485 давно знаком, у неё защита от статики и прочей гадости.
Я только пики знаю.
В качестве мозгов — 44-пиновый МК 10*10 мм размером.
И вот по сравнению с ним ADM3483 в SOIC-8 — здоровенная дура!
Ну и доступный лабаз продаёт резюки и кондюры не меньше 0603.
Так что всё равно сильно размер платы не уменьшить.
На мой взгляд, проще использовать единственный тип МК, в котором много избыточных возможностей. Чем под каждый случай подбирать оптимальный тип.
Надо бежать по пути наименьшего сопротивления, а не оптимизировать стоимость компонентов.
У меня ж не серия!!!
Sandro> А почему не I2C? Стандартное железо под неё сейчас гораздо проще добыть.
Да у меня с ней почти ничего и нет. Всё, что есть, помещается на одной плате.
А вот протянуть её на пару метров — это, на мой взгляд, плохая идея для полевой аппаратуры.
С RS485 давно знаком, у неё защита от статики и прочей гадости.

Xan> Я только пики знаю.
AVR (который мозг ATiny) не сложнее. Даже проще ИМХО, что мною и любим.
Xan> На мой взгляд, проще использовать единственный тип МК, в котором много избыточных возможностей. Чем под каждый случай подбирать оптимальный тип.
Это да. Естественно, унификация нужна.
Xan> А вот протянуть её на пару метров — это, на мой взгляд, плохая идея для полевой аппаратуры.
Xan> С RS485 давно знаком, у неё защита от статики и прочей гадости.
I2C же с открытым коллектором, какая нафиг статика? Там же резистор на шину питания!
Да и от наводок она защищена неплохо, там же по сути токовое управление состоянием шины.
AVR (который мозг ATiny) не сложнее. Даже проще ИМХО, что мною и любим.
Xan> На мой взгляд, проще использовать единственный тип МК, в котором много избыточных возможностей. Чем под каждый случай подбирать оптимальный тип.
Это да. Естественно, унификация нужна.
Xan> А вот протянуть её на пару метров — это, на мой взгляд, плохая идея для полевой аппаратуры.
Xan> С RS485 давно знаком, у неё защита от статики и прочей гадости.
I2C же с открытым коллектором, какая нафиг статика? Там же резистор на шину питания!
Да и от наводок она защищена неплохо, там же по сути токовое управление состоянием шины.


Sandro> AVR
Когда я начинал изучать микроконтроллеры (давно), эта фирма отказалась дать мне доки и инструменты на её продукцию.
А я в ответ послал её нахер.
Потом, похоже, её политика поменялась, народ радуется, я смотрю.
Но у меня с ней дружбы больше никогда не будет.
Sandro> какая нафиг статика?
Защита от искры в 15 киловольт.
Sandro> Да и от наводок она защищена неплохо, там же по сути токовое управление состоянием шины.
Плохо.
RS485 — гораздо лучше. Хоть на километры.
А IIC — "для связи между микросхемами в пределах платы". Из самого названия.
Когда я начинал изучать микроконтроллеры (давно), эта фирма отказалась дать мне доки и инструменты на её продукцию.
А я в ответ послал её нахер.
Потом, похоже, её политика поменялась, народ радуется, я смотрю.
Но у меня с ней дружбы больше никогда не будет.
Sandro> какая нафиг статика?
Защита от искры в 15 киловольт.
Sandro> Да и от наводок она защищена неплохо, там же по сути токовое управление состоянием шины.
Плохо.
RS485 — гораздо лучше. Хоть на километры.
А IIC — "для связи между микросхемами в пределах платы". Из самого названия.

Sandro>> AVR
Xan> Но у меня с ней дружбы больше никогда не будет.
У меня был подобный опыт с ними и начал использовать PIC - Микрочип дают все бесплатно.
Кстати, я использую MPU-6050 / MPU-6000 - это недорогой чип (купил его за $2 в Aliexpress). Он имеет 3D гироскопы (±250о/сек до ±2000о/сек) и 3D акселерометры (±2g до ±16g), - может быть полезны для ваших проектов.
С уважением
Xan> Но у меня с ней дружбы больше никогда не будет.
У меня был подобный опыт с ними и начал использовать PIC - Микрочип дают все бесплатно.
Кстати, я использую MPU-6050 / MPU-6000 - это недорогой чип (купил его за $2 в Aliexpress). Он имеет 3D гироскопы (±250о/сек до ±2000о/сек) и 3D акселерометры (±2g до ±16g), - может быть полезны для ваших проектов.
С уважением


pinko> Кстати, я использую MPU-6050 / MPU-6000 - это недорогой чип (купил его за $2 в Aliexpress)
У меня тоже есть MPU-6050, но его стабильность на базе 300 секунд гораздо хуже.
Главное, в его даташите вообще нет такой штуки, как график вариации Аллана...
Нам требуется продержаться минимум 300 секунд до коррекции.
У меня тоже есть MPU-6050, но его стабильность на базе 300 секунд гораздо хуже.
Главное, в его даташите вообще нет такой штуки, как график вариации Аллана...
Нам требуется продержаться минимум 300 секунд до коррекции.

Б.г.> более чисто поставленные опыты показывают, что это не случайная, а систематическая ошибка.
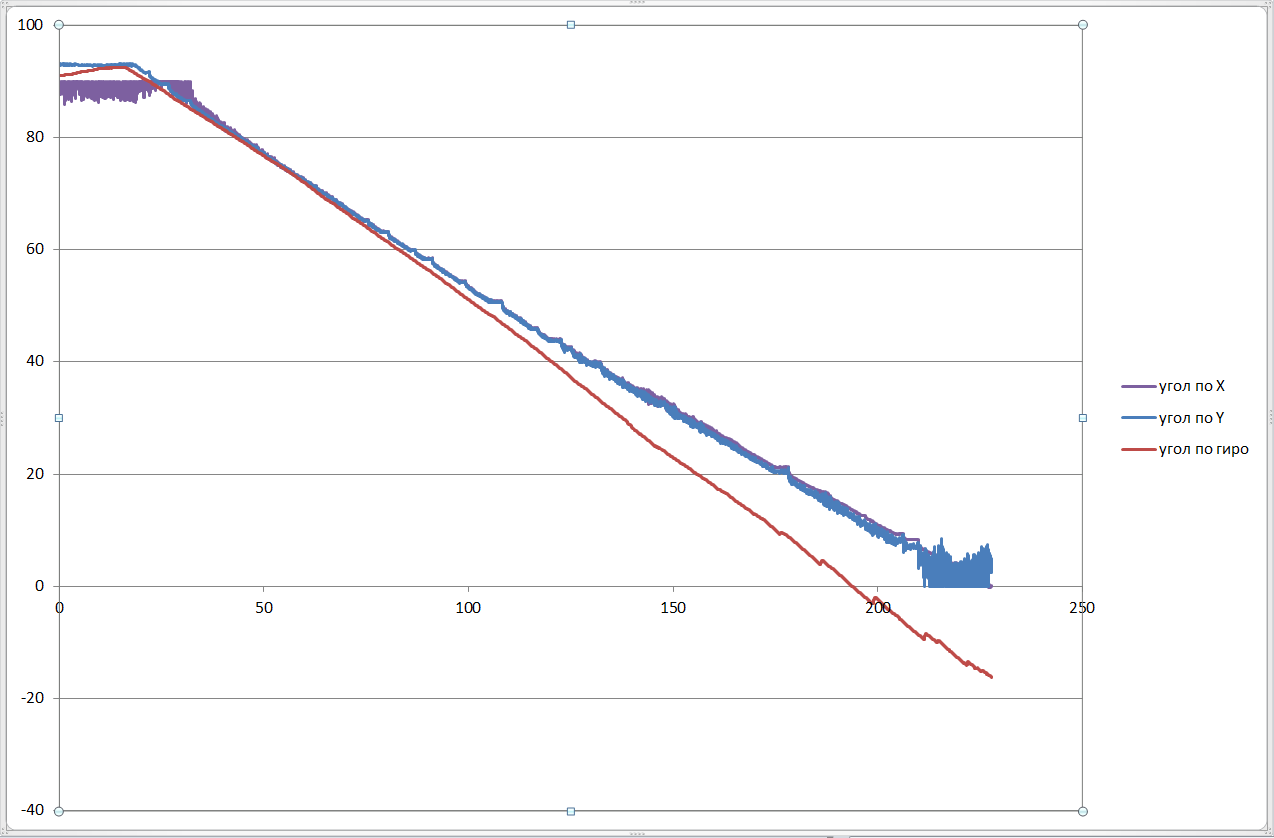
Успешно починенное автоопределение зоны нечувствительности привело к небольшим (в пределах 1/8 градуса) автоколебаниям, если их отфильтровать, график тангажа становится почти идеально красивым, но фактический угол по инклинометру и счислённый по гироскопу разошлись ещё дальше:
Успешно починенное автоопределение зоны нечувствительности привело к небольшим (в пределах 1/8 градуса) автоколебаниям, если их отфильтровать, график тангажа становится почти идеально красивым, но фактический угол по инклинометру и счислённый по гироскопу разошлись ещё дальше:
Прикреплённые файлы:

Б.г.> график тангажа становится почти идеально красивым, но фактический угол по инклинометру и счислённый по гироскопу разошлись ещё дальше:
Большая Московская гравитационная вращающаяся аномалия ?
/сорри /
Странно, линии инклиометров загибаются со временем. может в них ошибка ?
Большая Московская гравитационная вращающаяся аномалия ?
/сорри
/Странно, линии инклиометров загибаются со временем. может в них ошибка ?
Б.г.> Успешно починенное автоопределение зоны нечувствительности
Зашумил, или как?
Зашумил, или как?
Б.г.>> Успешно починенное автоопределение зоны нечувствительности
Sandro> Зашумил, или как?
Нет, речь идёт о том, что при ШИМ управлении коллекторными моторами есть диапазон кодов, когда моторчик ещё не может провернуться ни туда, ни сюда. При инициализации я мерял напряжение питания и подсчитывал величину этой зоны. Она в LSB тем меньше, чем больше напряжение. Там в одном месте у меня была ошибка - вместо адреса переменной я передавал её значение - в результате этот корректор был одинаковым, поэтому на 10 вольтах, пожалуй, всё бы работало, как сейчас, но на 8 вольтах (2 банки лития) корректор был недостаточен, и разворот из-за этого происходил рывками, а на 12 вольтах (3 банки лития) возникали автоколебания, и очень сильные.
Сейчас автоколебания тоже есть, но их амплитуда около 2/16-3/16 градуса. У меня выдача идёт в целых градусах и 256-х долях.
То, что по дороге он замедлился, возможно, ушёл ноль гироскопа, возможно, это следствие сдвига из-за этой постоянной угловой вибрации. Буду исследовать дальше.
Sandro> Зашумил, или как?
Нет, речь идёт о том, что при ШИМ управлении коллекторными моторами есть диапазон кодов, когда моторчик ещё не может провернуться ни туда, ни сюда. При инициализации я мерял напряжение питания и подсчитывал величину этой зоны. Она в LSB тем меньше, чем больше напряжение. Там в одном месте у меня была ошибка - вместо адреса переменной я передавал её значение - в результате этот корректор был одинаковым, поэтому на 10 вольтах, пожалуй, всё бы работало, как сейчас, но на 8 вольтах (2 банки лития) корректор был недостаточен, и разворот из-за этого происходил рывками, а на 12 вольтах (3 банки лития) возникали автоколебания, и очень сильные.
Сейчас автоколебания тоже есть, но их амплитуда около 2/16-3/16 градуса. У меня выдача идёт в целых градусах и 256-х долях.
То, что по дороге он замедлился, возможно, ушёл ноль гироскопа, возможно, это следствие сдвига из-за этой постоянной угловой вибрации. Буду исследовать дальше.
Б.г.>> график тангажа становится почти идеально красивым, но фактический угол по инклинометру и счислённый по гироскопу разошлись ещё дальше:
I.C.> Странно, линии инклиометров загибаются со временем. может в них ошибка ?
Вообще-то, во время этого разворота один чел заметил замедление вращения, но, с точки зрения гироскопа, всё происходило одинаково. Так что, это какая-то систематическая ошибка, вызывающая смещение нуля, возможно, чувствительность к линейному ускорению, возможно, сдвиг, вызванный вибрацией (MEMS к ней довольно уязвимы).
Хочешь, я тебе исходники пошлю? они сильно изменились с тех пор, что ты их правил.
Кстати, не собираешься в Москву?
I.C.> Странно, линии инклиометров загибаются со временем. может в них ошибка ?
Вообще-то, во время этого разворота один чел заметил замедление вращения, но, с точки зрения гироскопа, всё происходило одинаково. Так что, это какая-то систематическая ошибка, вызывающая смещение нуля, возможно, чувствительность к линейному ускорению, возможно, сдвиг, вызванный вибрацией (MEMS к ней довольно уязвимы).
Хочешь, я тебе исходники пошлю?
они сильно изменились с тех пор, что ты их правил.Кстати, не собираешься в Москву?
Б.г.> Нет, речь идёт о том, что при ШИМ управлении коллекторными моторами есть диапазон кодов, когда моторчик ещё не может провернуться ни туда, ни сюда.
То есть, ты по факту упёрся в трение покоя? А может, по классике, джиттер добавить? Ну это я условно, изделия же не видел.
То есть, ты по факту упёрся в трение покоя? А может, по классике, джиттер добавить? Ну это я условно, изделия же не видел.
Б.г.> Сейчас автоколебания тоже есть, но их амплитуда около 2/16-3/16 градуса. У меня выдача идёт в целых градусах и 256-х долях.
Спектр есть? Если есть узкополосный, можно же тупо режекторный фильтр прикрутить.
Спектр есть? Если есть узкополосный, можно же тупо режекторный фильтр прикрутить.
Б.г.>> Нет, речь идёт о том, что при ШИМ управлении коллекторными моторами есть диапазон кодов, когда моторчик ещё не может провернуться ни туда, ни сюда.
Sandro> То есть, ты по факту упёрся в трение покоя? А может, по классике, джиттер добавить? Ну это я условно, изделия же не видел.
Ну вот эти автоколебания и работают этим джиттером. их частота достаточно велика, чтобы сквозь фильтр с частотой среза 0,1 Гц ничего не проходило. Так что они мне в плюс, а не в минус. Надо только, чтобы их амплитуда была не больше минимально необходимой.
Sandro> То есть, ты по факту упёрся в трение покоя? А может, по классике, джиттер добавить? Ну это я условно, изделия же не видел.
Ну вот эти автоколебания и работают этим джиттером. их частота достаточно велика, чтобы сквозь фильтр с частотой среза 0,1 Гц ничего не проходило. Так что они мне в плюс, а не в минус. Надо только, чтобы их амплитуда была не больше минимально необходимой.
Б.г.>> более чисто поставленные опыты показывают, что это не случайная, а систематическая ошибка.
Снял ещё несколько серий - то большое расхождение, как раз, было случайным, неудачно гироскоп удрейфовал, а вот типичным является 18 плюс-минус 2 градуса:
Снял ещё несколько серий - то большое расхождение, как раз, было случайным, неудачно гироскоп удрейфовал, а вот типичным является 18 плюс-минус 2 градуса:
Прикреплённые файлы:
Б.г.>>> более чисто поставленные опыты показывают, что это не случайная, а систематическая ошибка.
Б.г.> Снял ещё несколько серий - то большое расхождение, как раз, было случайным, неудачно гироскоп удрейфовал, а вот типичным является 18 плюс-минус 2 градуса:
снял серию с пятикратно увеличенной скоростью - 2,5 градуса в секунду вместо 0,5 градуса в секунду, и расхождение уменьшилось радикально, с 18 до 4 градусов:
Получается, что это внутреннее свойство гироскопа, и бороться с этим не выйдет. Но, наверно, можно учитывать.
Б.г.> Снял ещё несколько серий - то большое расхождение, как раз, было случайным, неудачно гироскоп удрейфовал, а вот типичным является 18 плюс-минус 2 градуса:
снял серию с пятикратно увеличенной скоростью - 2,5 градуса в секунду вместо 0,5 градуса в секунду, и расхождение уменьшилось радикально, с 18 до 4 градусов:
Получается, что это внутреннее свойство гироскопа, и бороться с этим не выйдет. Но, наверно, можно учитывать.
Прикреплённые файлы:
Занимаюсь термокомпенсацией. Наблюдал любопытный эффект - нуль гироскопа зависит не только от абсолютной температуры, но и от скорости изменения этой температуры.
Обнаружил маленькую магию. Для ADIS16300 изменение температуры на 2 LSB термометра с хорошей точностью означают изменение на 1 LSB угловой скорости на самом чувствительном диапазоне. на дефолтовом, соответственно, 8 к 1. Правда, это справедливо только для медленного изменения и температуры выше 17 градусов Цельсия по внутреннему термометру. Есть ощущение, что термометр занижает на 2-3 градуса.
Обнаружил маленькую магию. Для ADIS16300 изменение температуры на 2 LSB термометра с хорошей точностью означают изменение на 1 LSB угловой скорости
на самом чувствительном диапазоне. на дефолтовом, соответственно, 8 к 1. Правда, это справедливо только для медленного изменения и температуры выше 17 градусов Цельсия по внутреннему термометру. Есть ощущение, что термометр занижает на 2-3 градуса.
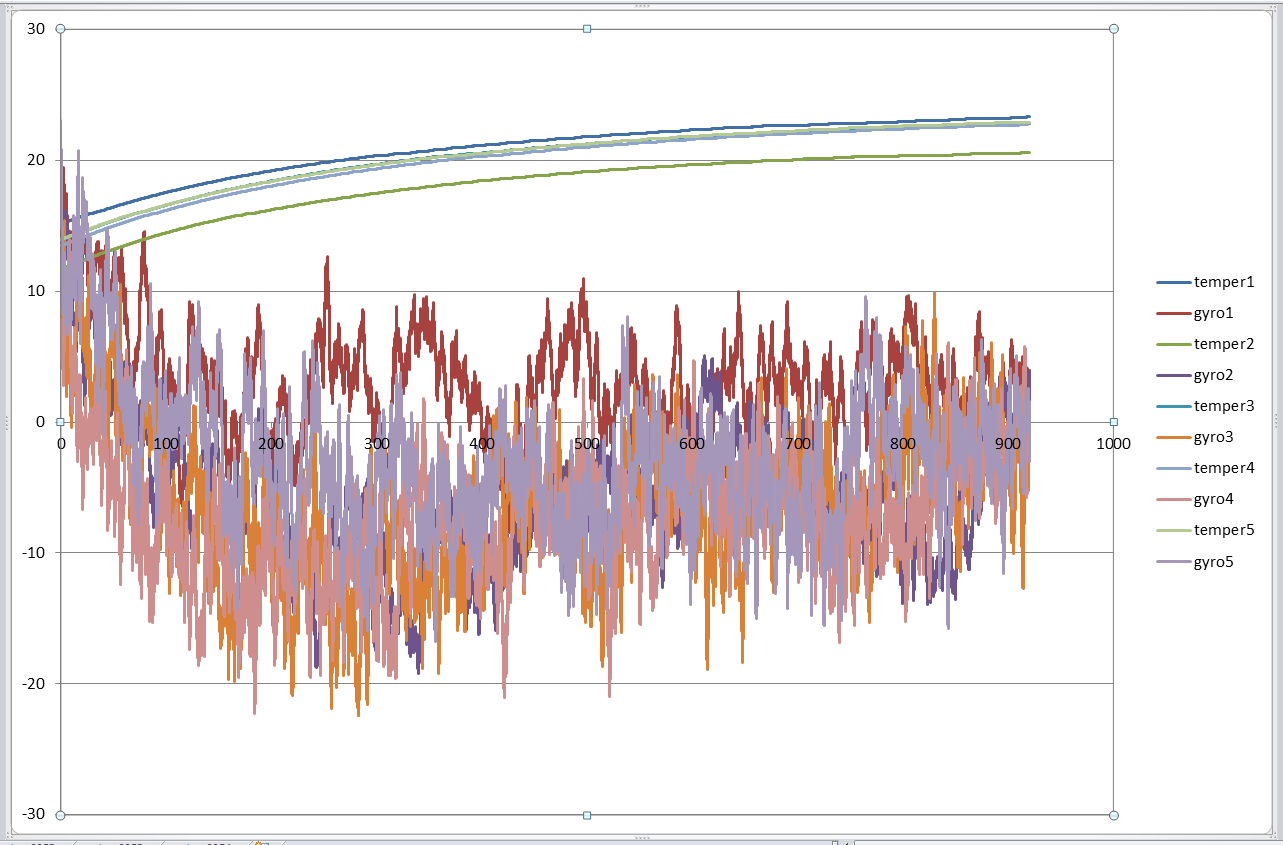
Б.г.> Занимаюсь термокомпенсацией. Наблюдал любопытный эффект - нуль гироскопа зависит не только от абсолютной температуры, но и от скорости изменения этой температуры.
Картинка, иллюстрирующая это явление:
Вначале, когда скорость изменения температуры большая, константа, подходящая для термокоррекции, когда она станет маленькой, совершенно недостаточна.
Картинка, иллюстрирующая это явление:
Вначале, когда скорость изменения температуры большая, константа, подходящая для термокоррекции, когда она станет маленькой, совершенно недостаточна.
Прикреплённые файлы:
Б.г.> Картинка, иллюстрирующая это явление:
Б.г.> Вначале, когда скорость изменения температуры большая, константа, подходящая для термокоррекции, когда она станет маленькой, совершенно недостаточна.
На картинке представлены 5 серий по 15 минут, причём, термокоррекция уже включена. Видно, что, начиная где-то с 4-й минуты, графики "гуляют" сами по себе, остаток с температурой не коррелирует.
Гироскоп находится в спокойном воздухе (не обдувается), греется только внутренним тепловыделением, покоится, ориентация осей всегда одинакова.
Б.г.> Вначале, когда скорость изменения температуры большая, константа, подходящая для термокоррекции, когда она станет маленькой, совершенно недостаточна.
На картинке представлены 5 серий по 15 минут, причём, термокоррекция уже включена. Видно, что, начиная где-то с 4-й минуты, графики "гуляют" сами по себе, остаток с температурой не коррелирует.
Гироскоп находится в спокойном воздухе (не обдувается), греется только внутренним тепловыделением, покоится, ориентация осей всегда одинакова.

Б.г.> Гироскоп находится в спокойном воздухе (не обдувается), греется только внутренним тепловыделением, покоится, ориентация осей всегда одинакова.
По оси Y для gyro - градусы поворота?
По оси Y для gyro - градусы поворота?
Про температуру подумалось.
Первое.
Вот стоит ракета на старте, электроника прогрета, тепловой режим установился.
Полетели.
Ускорение изменилось, конвекция изменилась, температура поплыла.
Второе.
Если электроника не герметичная, то воздух будет расширяться, утекая с высотой.
И охлаждаться и охлаждать.
Тут всё легко считается: холода получится максимум 0.4 * теплоёмкость_слоя_воздуха * начальную_температуру.
0.4 — это гамма - 1
Плотность собранной платы с электроникой около 0.4 грамма на см2. Удельная теплоёмкость у неё примерно как у воздуха.
Если считать, что платы расположены с шагом 1 см. то на каждую придётся слой воздуха 1 см, который весит 0.001 грамма на см2.
Итого, воздуха в 0.4 / 0.001 = 400 раз меньше, чем платы.
Воздух остывает от комнатной (300 кельвинов) до нуля. 300 умножаем на 0.4 получаем 120 как бы градусов.
120 делим на 400, получаем 0.3 градуса — это насколько охладится плата. Это максимальная оценка.
Если отсек с электроникой просторнее, то и плата будет остывать сильнее.
Вначале, пока атмосфера плотная, на километр высоты будет остывать на 0.3 / 8 = 0.04 градуса.
8 — это постоянная плотности атмосферы, H_0 = 8 км.
rho = rho_0 * exp(-H / H_0)
Первое.
Вот стоит ракета на старте, электроника прогрета, тепловой режим установился.
Полетели.
Ускорение изменилось, конвекция изменилась, температура поплыла.
Второе.
Если электроника не герметичная, то воздух будет расширяться, утекая с высотой.
И охлаждаться и охлаждать.
Тут всё легко считается: холода получится максимум 0.4 * теплоёмкость_слоя_воздуха * начальную_температуру.
0.4 — это гамма - 1
Плотность собранной платы с электроникой около 0.4 грамма на см2. Удельная теплоёмкость у неё примерно как у воздуха.
Если считать, что платы расположены с шагом 1 см. то на каждую придётся слой воздуха 1 см, который весит 0.001 грамма на см2.
Итого, воздуха в 0.4 / 0.001 = 400 раз меньше, чем платы.
Воздух остывает от комнатной (300 кельвинов) до нуля. 300 умножаем на 0.4 получаем 120 как бы градусов.
120 делим на 400, получаем 0.3 градуса — это насколько охладится плата. Это максимальная оценка.
Если отсек с электроникой просторнее, то и плата будет остывать сильнее.
Вначале, пока атмосфера плотная, на километр высоты будет остывать на 0.3 / 8 = 0.04 градуса.
8 — это постоянная плотности атмосферы, H_0 = 8 км.
rho = rho_0 * exp(-H / H_0)
Это сообщение редактировалось 03.05.2015 в 07:48
Б.г.>> Гироскоп находится в спокойном воздухе (не обдувается), греется только внутренним тепловыделением, покоится, ориентация осей всегда одинакова.
Massaraksh> По оси Y для gyro - градусы поворота?
Нет, LSB угловой скорости. 1 LSB - 1/40 градуса в секунду. Градусов поворота при таком уходе нуля за 15 минут выходит совершенно чудовищное количество
Massaraksh> По оси Y для gyro - градусы поворота?
Нет, LSB угловой скорости. 1 LSB - 1/40 градуса в секунду. Градусов поворота при таком уходе нуля за 15 минут выходит совершенно чудовищное количество
Xan> Про температуру подумалось.
Xan> Если электроника не герметичная, то воздух будет расширяться, утекая с высотой.
Xan> И охлаждаться и охлаждать.
не, при уменьшении плотности воздуха тепловое сопротивление растёт быстрее, чем охлажается воздух. Особенно, если конвекция затруднена, т.е. платы стоят в кожухе, хоть и негерметичном.
это уже выяснено экспериментально на тех кубсатах, что писали собственную температуру во время вывода на орбиту. передавать во время вывода кубсат ничего не может, запрещено, да и радиопрозрачных дырок в обтекателе под это нету, но писать на флэшку и передать после вывода, никто не запрещает.
Xan> Если электроника не герметичная, то воздух будет расширяться, утекая с высотой.
Xan> И охлаждаться и охлаждать.
не, при уменьшении плотности воздуха тепловое сопротивление растёт быстрее, чем охлажается воздух. Особенно, если конвекция затруднена, т.е. платы стоят в кожухе, хоть и негерметичном.
это уже выяснено экспериментально на тех кубсатах, что писали собственную температуру во время вывода на орбиту. передавать во время вывода кубсат ничего не может, запрещено, да и радиопрозрачных дырок в обтекателе под это нету, но писать на флэшку и передать после вывода, никто не запрещает.
Б.г.> Нет, LSB угловой скорости. 1 LSB - 1/40 градуса в секунду. Градусов поворота при таком уходе нуля за 15 минут выходит совершенно чудовищное количество
Тогда вряд ли это конструктивная особенность микросхемы.
Или микросхема неисправная или подключение неверное.
Тогда вряд ли это конструктивная особенность микросхемы.
Или микросхема неисправная или подключение неверное.
Б.г.>> Нет, LSB угловой скорости. 1 LSB - 1/40 градуса в секунду. Градусов поворота при таком уходе нуля за 15 минут выходит совершенно чудовищное количество
Massaraksh> Тогда вряд ли это конструктивная особенность микросхемы.
Это именно она Даташит свидетель:
Bias Temperature Coefficient 0.1 °/sec/°C
т.е. 4 LSB на градус. У меня экспериментально вышло 3,5 LSB на градус, но это выполняется только для медленно меняющейся температуры, вначале, пока прогрев быстрый, коэффициент пропорциональности около 6.
Ошибка определения нуля на 0,1 градуса в секунду приводит к укрутке данных на 90 градусов за 900 секунд.
Massaraksh> Или микросхема неисправная или подключение неверное.
На это предположение я мог бы ответить словами одного мультяшного персонажа:
"Как ты можешь утверждать, что мои часы спешат? Все мои часы показывают одинаковое время!"
У меня в этой установке, кроме ADIS16300, стоит ещё ADIS16251, и картинка совершенно такая же.
Да и что там неправильно подключать? 5 вольт стабильное, а, даже если бы и нет, микросхема питается от LDO на 3.3 внутри у себя, SPI либо работает, либо нет.
Massaraksh> Тогда вряд ли это конструктивная особенность микросхемы.
Это именно она
Даташит свидетель:Bias Temperature Coefficient 0.1 °/sec/°C
т.е. 4 LSB на градус. У меня экспериментально вышло 3,5 LSB на градус, но это выполняется только для медленно меняющейся температуры, вначале, пока прогрев быстрый, коэффициент пропорциональности около 6.
Ошибка определения нуля на 0,1 градуса в секунду приводит к укрутке данных на 90 градусов за 900 секунд.
Massaraksh> Или микросхема неисправная или подключение неверное.
На это предположение я мог бы ответить словами одного мультяшного персонажа:
"Как ты можешь утверждать, что мои часы спешат? Все мои часы показывают одинаковое время!"
У меня в этой установке, кроме ADIS16300, стоит ещё ADIS16251, и картинка совершенно такая же.
Да и что там неправильно подключать? 5 вольт стабильное, а, даже если бы и нет, микросхема питается от LDO на 3.3 внутри у себя, SPI либо работает, либо нет.
Реклама Google — средство выживания форумов :)
Б.г.> Ошибка определения нуля на 0,1 градуса в секунду приводит к укрутке данных на 90 градусов за 900 секунд.
Тогда область применения данной микросхемы подходит разве что ПТУРам.
Тогда область применения данной микросхемы подходит разве что ПТУРам.
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
