-
![[image]](https://www.balancer.ru/cache/sites/com/wo/wordpress/files/missiles2go/2013/10/128x128-crop/img_8660.jpg)
Томагавк против ПВО
Теги:
 Serg Ivanov
Serg Ivanov

Кашалот>> С учетом того что корректирующего газодинамического двигателя нету то возможно создание высокого ускорения за счет того что при полете по баллистической траектории основной двигатель включается снова.
Зачем? На высоте 40-50 км при скорости 2 км/с аэродинамических сил вполне достаточно, ниже - тем более. Несущий конус на гиперзвуке 1,5-2,0 аэродинамическое качество даст. Т.е. при снижении скорости встречи с целью до 600-800 м/с боковая составляющая получается порядка 1,5 км/с, даже без учёта разгона силой тяжести на нисходящем участке.
Старый> Твердотопливный двигатель который включается снова это Нобель. Однозначно. Ну на самый худой конец Госпремия.
Да фиг там.. Давно не дают, даже за трёхкратного включения.
Ну на, попробуй")
Зачем? На высоте 40-50 км при скорости 2 км/с аэродинамических сил вполне достаточно, ниже - тем более. Несущий конус на гиперзвуке 1,5-2,0 аэродинамическое качество даст. Т.е. при снижении скорости встречи с целью до 600-800 м/с боковая составляющая получается порядка 1,5 км/с, даже без учёта разгона силой тяжести на нисходящем участке.
Старый> Твердотопливный двигатель который включается снова это Нобель. Однозначно. Ну на самый худой конец Госпремия.
Да фиг там.. Давно не дают, даже за трёхкратного включения.
Ну на, попробуй
")
Прикреплённые файлы:


Это сообщение редактировалось 10.05.2017 в 20:19
 инфо
инфо инструменты
инструменты
Старый>> Твердотопливный двигатель который включается снова это Нобель. Однозначно. Ну на самый худой конец Госпремия.
m-dva> Тебе же сказали, это комплекс"Морфий" "Морфей"
Это для идиотов. Остальным - читать до просветления сознания:

m-dva> Тебе же сказали, это комплекс
Это для идиотов. Остальным - читать до просветления сознания:
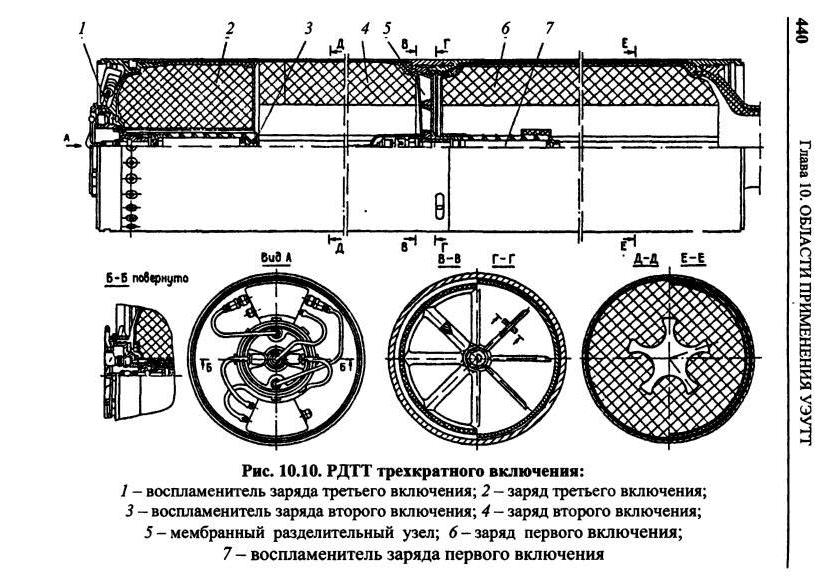
Соколовский М.И. и др. - Управляемые энергетические установки на твердом ракетном топливе (2003)
Скачать книгу Соколовский М.И. и др. - Управляемые энергетические установки на твердом ракетном топливе (2003) | Mexalib - скачать книги бесплатно // mexalib.com
Прикреплённые файлы:

Это сообщение редактировалось 10.05.2017 в 20:10
 LtRum
LtRum

S.I.> Зачем? На высоте 40-50 км при скорости 2 км/с аэродинамических сил вполне достаточно, ниже - тем более. Несущий конус на гиперзвуке 1,5-2,0 аэродинамическое качество даст.
Ну да, когда мы Х-22 сбиваем, то сил на высоте 25 км для создания перегрузки ЗУР 1,5 уже недостаточно (при этом корпус ЗУР не считаем вообще), а вот тут на такой же высоте (нисходящий участок) с минимальными "аэродинамическими поверхностями", просто таким коническим корпусом - вполне достаточно". Как говориться - либо крестик, либо трусы.
S.I.> Т.е. при снижении скорости встречи с целью до 600-800 м/с боковая составляющая получается порядка 1,5 км/с, даже без учёта разгона силой тяжести на нисходящем участке.
Вообще-то написано
Ну да, когда мы Х-22 сбиваем, то сил на высоте 25 км для создания перегрузки ЗУР 1,5 уже недостаточно (при этом корпус ЗУР не считаем вообще), а вот тут на такой же высоте (нисходящий участок) с минимальными "аэродинамическими поверхностями", просто таким коническим корпусом - вполне достаточно". Как говориться - либо крестик, либо трусы.
S.I.> Т.е. при снижении скорости встречи с целью до 600-800 м/с боковая составляющая получается порядка 1,5 км/с, даже без учёта разгона силой тяжести на нисходящем участке.
Вообще-то написано
, а не "скорость встречи с целью".опускаясь на скорости 700—800 м/с


LtRum> когда мы Х-22 сбиваем, то сил на высоте 25 км а вот тут на высоте вдвое большей с минимальными , просто таким коническим корпусом - вполне достаточно". Как говориться - либо крестик, либо трусы.
Либо мозги включи. Скорость вдвое больше - аэродинамическая сила в четыре раза больше.
LtRum> , а не "скорость встречи с целью".
Ага, и куда же она делась эта скорость?
Либо мозги включи. Скорость вдвое больше - аэродинамическая сила в четыре раза больше.
LtRum> , а не "скорость встречи с целью".
Ага, и куда же она делась эта скорость?
S.I.> Либо мозги включи. Скорость вдвое больше - аэродинамическая сила в четыре раза больше.
Большая скорость только на высоте обещана. Судя по цитатке опускается он на скорости "700-800 м/с".
Прежде чем советовать, стоит научиться читать.
LtRum>> , а не "скорость встречи с целью".
S.I.> Ага, и куда же она делась эта скорость?
Это ты у автора цитаты спроси.
Большая скорость только на высоте обещана. Судя по цитатке опускается он на скорости "700-800 м/с".
Прежде чем советовать, стоит научиться читать.
LtRum>> , а не "скорость встречи с целью".
S.I.> Ага, и куда же она делась эта скорость?
Это ты у автора цитаты спроси.
Либо мозги включи. Скорость вдвое больше - аэродинамическая сила в четыре раза больше.
LtRum> Большая скорость только на высоте обещана. Судя по цитатке опускается он на скорости "700-800 м/с".
Ну да опускается - с маневрированием. Иначе скорости просто некуда деться, а ГСН невозможно работать в плазме. Першинг-2 тоже с такой скоростью опускался.
LtRum> Большая скорость только на высоте обещана. Судя по цитатке опускается он на скорости "700-800 м/с".
Ну да опускается - с маневрированием. Иначе скорости просто некуда деться, а ГСН невозможно работать в плазме. Першинг-2 тоже с такой скоростью опускался.
Это сообщение редактировалось 10.05.2017 в 21:20
Старый> Погоди, ты о чём? Речь шла о том что в ответ на пуски по нам Томагавков в ответ по месту пуска полетят Искандеры с ЯБЧ.
А почему Искандеры, а не РС-26? Работающая РЛС AN/SPY-1 - прекрасный маяк для маневрирующих на внеатмосферном участке ББ. А наведение ещё на Р-27К отработано.

из Скачать Соколовский М.И. и др. - Управляемые энергетические установки на твердом ракетном топливе (2003)
А почему Искандеры, а не РС-26? Работающая РЛС AN/SPY-1 - прекрасный маяк для маневрирующих на внеатмосферном участке ББ. А наведение ещё на Р-27К отработано.
Противокорабельная баллистическая ракета Р-27К
Современные ударные системы, предназначенные для уничтожения надводных кораблей противника, основываются на крылатых ракетах различных типах. Подобное вооружение давно показало себя с хороше // topwar.ruЮрий Соломонов. «В 2010 году мы провели уникальную работу, позволившую сделать принципиально новый шаг в создании нового типа боевого оснащения, которое является результатом интегрирования боевого оснащения баллистического типа с индивидуальными средствами его разведения взамен так называемого «автобуса» на боевых ракетах», — сказал Соломонов.
• По его словам, эта разработка «поставит вообще точку на всех разговорах относительно нашей борьбы с несуществующей системой противоракетной обороны предполагаемого противника». Соломонов отметил, что «почти 30 лет назад мы говорили о возможности реализации такой схемы боевого оснащения, как о научной фантастике». «И вот в прошлом году мы эту научную фантастику впервые воплотили с положительным результатом в жизнь», — сказал генеральный конструктор.
• Он пояснил, что теперь «ракета, как единое целое, практически, перестает существовать по завершении работы последней маршевой ступени. Как известно, существующая ракета имеет огромный участок разведения боевых блоков для того, чтобы иметь определенные возможности по поражению в случае применения разделяющейся головной части одной ракеты нескольких целей, удаленных на значительное друг от друга расстояние», — сказал генеральный конструктор.
ДВИГАТЕЛЬНЫЕ УСТАНОВКИ ВЕРХНЕЙ СТУПЕНИ
БАЛЛИСТИЧЕСКОЙ РАКЕТЫ
Первые образцы ракет дальнего действия имели один блок
полезной нагрузки. Многие современные ракеты стратегического
назначения оснащены разделяющейся головной частью (РГЧ),
содержащей до 10 блоков и несколько ложных целей. Для
обеспечения точной доставки каждого блока по «адресу» последняя
ступень ракеты оснащается системой разведения или индивидуальной
двигательной установкой [4, 8-10,22,25 - 27].
С помощью таких двигательных установок решаются
следующие задачи:
• обеспечивается требуемая дальность полета
баллистической ракеты без отсечки тяги маршевого двигателя;
• доводится максимальная скорость ракеты до необходимых
значений на малых ускорениях;
• разводятся блоки полезной нагрузки по заданным целям с
нулевой или глубокодросселированной тягой двигателя;
• создается автономная экономичная система управления
вектором тяги маршевых двигателей ракеты;
• создаются системы для стабилизации и наведения головок
самонаведения;
• создается ДУ с большим временем работы для наведения
полезной нагрузки на цель с использованием телевизионных и
трансляционных систем.
из Скачать Соколовский М.И. и др. - Управляемые энергетические установки на твердом ракетном топливе (2003)
Это сообщение редактировалось 10.05.2017 в 21:37
LtRum>> Большая скорость только на высоте обещана. Судя по цитатке опускается он на скорости "700-800 м/с".
S.I.> Ну да опускается - с маневрированием. Иначе скорости просто некуда деться, а ГСН невозможно работать в плазме. Першинг-2 тоже с такой скоростью опускался.
Ну вот и определились со скоростью - 700-800 м/c/
Ну т.е. скорость такая же как и у Standard-а из предыдущей задачки про X-22, аэродинамическое качество хуже (не развитых аэродинамических поверхностей), но маневрирует в 20-30 раз лучше.
А говорят законы физики для все едины.
Не, я могу понять 2-3, ну там за счет "учения маркса-ленина" против "проклятого капитализма", но в 20-30.
ЗЫ. На высоте кстати тоже не все так хорошо: плотность на 50км меньше, чем на 24 км в 25 раз, поэтому несмотря на повышенную скорость, сила будет меньше.
Может уже начнешь уже учить физику, а не высасывать из пальца на основании всякой "ОБС"?
S.I.> Ну да опускается - с маневрированием. Иначе скорости просто некуда деться, а ГСН невозможно работать в плазме. Першинг-2 тоже с такой скоростью опускался.
Ну вот и определились со скоростью - 700-800 м/c/
Ну т.е. скорость такая же как и у Standard-а из предыдущей задачки про X-22, аэродинамическое качество хуже (не развитых аэродинамических поверхностей), но маневрирует в 20-30 раз лучше.
А говорят законы физики для все едины.
Не, я могу понять 2-3, ну там за счет "учения маркса-ленина" против "проклятого капитализма", но в 20-30.
ЗЫ. На высоте кстати тоже не все так хорошо: плотность на 50км меньше, чем на 24 км в 25 раз, поэтому несмотря на повышенную скорость, сила будет меньше.
Может уже начнешь уже учить физику, а не высасывать из пальца на основании всякой "ОБС"?
Это сообщение редактировалось 10.05.2017 в 21:57
 Старый
Старый
S.I.> Несущий конус на гиперзвуке 1,5-2,0 аэродинамическое качество даст.
И какое же качество? И какую же подъёмную силу он создаёт? В 20 раз превышающую массу аппарата?
S.I.> Т.е. при снижении скорости встречи с целью до 600-800 м/с боковая составляющая получается порядка 1,5 км/с,
Какая нечистая сила создаёт боковую силу в 20 раз превышающую массу аппарата?
И какое же качество? И какую же подъёмную силу он создаёт? В 20 раз превышающую массу аппарата?
S.I.> Т.е. при снижении скорости встречи с целью до 600-800 м/с боковая составляющая получается порядка 1,5 км/с,
Какая нечистая сила создаёт боковую силу в 20 раз превышающую массу аппарата?


S.I.> А почему Искандеры, а не РС-26?
Спроси у автора который это придумал и которому я отвечал. Я то тут при чём?
Спроси у автора который это придумал и которому я отвечал. Я то тут при чём?

Старый> Какая нечистая сила создаёт боковую силу в 20 раз превышающую массу аппарата?
а какая нечистая сила добавляет +20ед. перегрузки для Астера?
или какая нечистая сила дает перегрузку 20ед для 9М96
блин, уровень авиабазы падает с каждым годом....
а какая нечистая сила добавляет +20ед. перегрузки для Астера?
или какая нечистая сила дает перегрузку 20ед для 9М96
блин, уровень авиабазы падает с каждым годом....


EvgenyVB> или какая нечистая сила дает перегрузку 20ед для 9М96
Да, какая?
EvgenyVB> блин, уровень авиабазы падает с каждым годом....
Но твой то уровень высок? Так расскажи нам, неразумным. Зачем в себе держишь, не делишься?
Да, какая?
EvgenyVB> блин, уровень авиабазы падает с каждым годом....
Но твой то уровень высок? Так расскажи нам, неразумным. Зачем в себе держишь, не делишься?
 LtRum
LtRum
EvgenyVB> а какая нечистая сила добавляет +20ед. перегрузки для Астера?
Там двигатель специальный в описании указан.
В приведенном описании Искандера такое есть?
Там двигатель специальный в описании указан.
В приведенном описании Искандера такое есть?

Старый> Но твой то уровень высок?
шутку оценил, смешно.
ходить на абазу набегами оказалось весьма интересно.
учитывая, что я тут где-то с года так 2002-3, занятно наблюдать на дискуссии...
шутку оценил, смешно.
ходить на абазу набегами оказалось весьма интересно.
учитывая, что я тут где-то с года так 2002-3, занятно наблюдать на дискуссии...
LtRum> В приведенном описании Искандера такое есть?
во-первых: я далек от мысли, что в открытом доступе есть достоверная схема ракеты Искандер
во-вторых - там упоминалась газодинамика. неужто это строго рули в сопле?
во-первых: я далек от мысли, что в открытом доступе есть достоверная схема ракеты Искандер
во-вторых - там упоминалась газодинамика. неужто это строго рули в сопле?
 m-dva
m-dva

LtRum> Там двигатель специальный в описании указан.
LtRum> В приведенном описании Искандера такое есть?
А зачем Искандеру такой двигатель?
Ведь, что бы начать маневр уклонения от ЗУР необходимо знать время и направление атаки этой самой ЗУР,- за для такой роскоши вместо БЧ придется тянуть полноценную станцию РТР.
LtRum> В приведенном описании Искандера такое есть?
А зачем Искандеру такой двигатель?
Ведь, что бы начать маневр уклонения от ЗУР необходимо знать время и направление атаки этой самой ЗУР,- за для такой роскоши вместо БЧ придется тянуть полноценную станцию РТР.
Старый>> Но твой то уровень высок?
EvgenyVB> шутку оценил, смешно.
Я рад за тебя.
Как я понимаю объяснений какая нечистая сила создаёт боковую перегрузку мы не дождёмся?
EvgenyVB> шутку оценил, смешно.
Я рад за тебя.
Как я понимаю объяснений какая нечистая сила создаёт боковую перегрузку мы не дождёмся?

EvgenyVB> учитывая, что я тут где-то с года так 2002-3, занятно наблюдать на дискуссии...
Ну я то наблюдаю за местными дискуссиями года на два дольше чем ты и участвую раз в пять (раз в шесть!) чаще чем ты, так что мне в шесть раз смешнее.
Однако раз ты такой старожил то скажи: что это у тебя на аватаре?
Ну я то наблюдаю за местными дискуссиями года на два дольше чем ты и участвую раз в пять (раз в шесть!) чаще чем ты, так что мне в шесть раз смешнее.
Однако раз ты такой старожил то скажи: что это у тебя на аватаре?
EvgenyVB> во-вторых - там упоминалась газодинамика. неужто это строго рули в сопле?
А что ещё? Газовые сопла?
Надеюсь не торсионные поля?
А что ещё? Газовые сопла?
Надеюсь не торсионные поля?
EvgenyVB> во-первых: я далек от мысли, что в открытом доступе есть достоверная схема ракеты Искандер
Что позволяет сочинять про него любые небылицы, что очень удобно в работе пропагандистов... Если-б только еще физика не мешалась.
Что позволяет сочинять про него любые небылицы, что очень удобно в работе пропагандистов... Если-б только еще физика не мешалась.

Старый> Какая нечистая сила создаёт боковую силу в 20 раз превышающую массу аппарата?
Чистая продольная перегрузка в 10 раз превышающую массу аппарата. При входе в атмосферу под большим углом волне реальна.
Чистая продольная перегрузка в 10 раз превышающую массу аппарата. При входе в атмосферу под большим углом волне реальна.

LtRum> В приведенном описании Искандера такое есть?
Ясен пень, что настоящую схему никто в общий доступ не выложит.
Но можно вспомнить ЗУРы ЗРК "Тор", и наличие у них микродвигателей отклонения после старта...
Выше задавали вопрос о необходимости иметь станцию обнаружения облучения РЛС на борту "Искандера". А зачем? Достаточно иметь программу изменения траектории в блоке управления полётом.
Ни одно оружие или система вооружения не является панадолом. Ни наступательное, ни оборонительное. Если не требовать от них невозможного, чуток урезать собственные хотелки, то окружающий мир станет чуточку реальнее.")
Ясен пень, что настоящую схему никто в общий доступ не выложит.
Но можно вспомнить ЗУРы ЗРК "Тор", и наличие у них микродвигателей отклонения после старта...
Выше задавали вопрос о необходимости иметь станцию обнаружения облучения РЛС на борту "Искандера". А зачем? Достаточно иметь программу изменения траектории в блоке управления полётом.
Ни одно оружие или система вооружения не является панадолом. Ни наступательное, ни оборонительное. Если не требовать от них невозможного, чуток урезать собственные хотелки, то окружающий мир станет чуточку реальнее.
")
Старый>> Какая нечистая сила создаёт боковую силу в 20 раз превышающую массу аппарата?
Чистая продольная перегрузка в 10 раз превышающую массу аппарата. При входе в атмосферу под большим углом волне реальна.
Искандер: при входе 12же продольная перегрузка, при аэродинамическом качестве К=1 на пикирование. Это не ЗУР - ему вниз надо. Скорость у цели - 1500м/с.
Чистая продольная перегрузка в 10 раз превышающую массу аппарата. При входе в атмосферу под большим углом волне реальна.
Искандер: при входе 12же продольная перегрузка, при аэродинамическом качестве К=1 на пикирование. Это не ЗУР - ему вниз надо. Скорость у цели - 1500м/с.
Прикреплённые файлы:
Искан.xls (скачать)
[1,28 МБ]
S.I.> Искандер: при входе 12же продольная перегрузка, при аэродинамическом качестве К=1 на пикирование. Это не ЗУР - ему вниз надо. Скорость у цели - 1500м/с.
Это у "Оки"царство ей небесное, алилуя было порядка 1300-1400 м/с.
"Искандер" до этих показателей не дотягивает ни в коем случае, по политическо-договорным соображениям.
Это у "Оки"
"Искандер" до этих показателей не дотягивает ни в коем случае, по политическо-договорным соображениям.
S.I.> Чистая продольная перегрузка в 10 раз превышающую массу аппарата. При входе в атмосферу под большим углом волне реальна.
Так нада же в боковом направлении. Продольная перегрузка на ЗРК не влияет. С продольной перегрузкой вообще не маневрируют, только тормозят.
Так нада же в боковом направлении. Продольная перегрузка на ЗРК не влияет. С продольной перегрузкой вообще не маневрируют, только тормозят.
Copyright © Balancer 1997..2019
Создано 01.05.2017
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 01.05.2017
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
