 Брат-2
Брат-2
 инфо
инфо инструменты
инструменты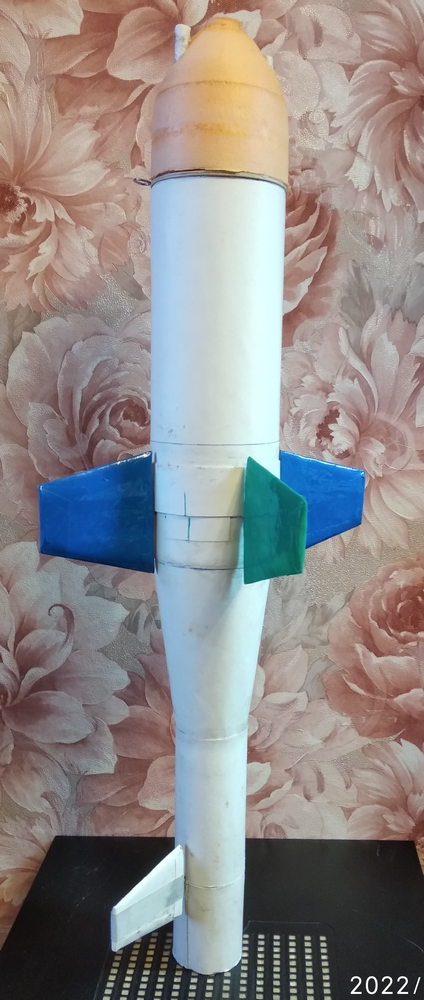
 Xan
Xan

 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/45520/128x128-crop/45520_original.png)
Стабилизация Активная – попытка практической реализации.
Активная гировертикаль.Теги:

На нашем форуме ранее были темы, на которых поднимались вопросы, связанные с проблемами управления моделями ракет. Тема: «Стабилизация Активная – способы реализации». Открыл тему termostat в 2003-2004гг. Тема: «Стабилизация Активная - часть II». Открыл тему termostat в 2004-2016гг.
Тема: «Тягомерный стенд с карданным подвесом». Открыл тему Non-conformist в 2013г. Вопросы по данной тематике у участников нашего форума вызывали интерес, но обсуждение решений практической реализации сводилось лишь к обозначению имеющихся проблем.
Для управления моделями ракет, в частности для выдерживания вертикального старта, необходимы датчики положения ракеты в пространстве, для этого служат гироскопы. Однако для нас доступны лишь дешевые гражданские MEMS гироскопы типа GY-521.
ОПИСАНИЕ
Микросхема: MPU-6050 (гироскоп 3-осевой + акселерометр на три координаты)
Напряжение питания модуля: от 3,3V до 5V (DC);
Чип MPU-6050: 16 битный АЦП, 16-ти битный вывод данных;
Гироскоп диапазон: ± 250 500 1000 2000 ° / с
Акселерометр диапазон: ± 2 ± 4 ± 8 ± 16g
Связь c контроллером по стандартному коммуникационному протоколу IIC (I2C).
Однако гироскопы выдают не угол поворота, а угловую скорость, из которой интегрированием получают угол поворота. При этом шумы микрофонного эффекта, собственные шумы гироскопа, неточности при интегрировании приводят к ошибкам, так называемым ошибкам накопления. То есть если повернуть MEMS гироскоп на некоторый угол, то при возврате он покажет исходный ноль с некоторой ошибкой.
По этой причине для позиционирования использовать только одни гироскопы не представляется возможны. В системах, где необходима гиростабилизация, гироскопы используются совместно с акселерометрами (для коррекции ошибок), но это в условиях отсутствия заметных ускорений. Причем подобная коррекция возможна только для осей X и Y, а вот по вертикальной оси Z нет.
Тем не менее, мы видим, что в летательных аппаратах (квадрокоптеры, 2D стабилизаторы моделей самолетов и вертолетов), где используются подобные MEMS гироскопы, проблем со стабилизацией нет, при наличии значительных разнонаправленных ускорений. В связи с этим мне пришла в голову мысль проверить работоспособность MEMS гироскопов MPU-6050 (модуль GY-521) при условии совместной работы с акселерометрами. При этом оси X(тангаж) и Y (рыскание) будут с коррекцией, а по оси Z (крен) будет работать только один гироскоп. Для исключения влияния ошибок оси Z на оси X и Y не используется микс, а руль крена установлен отдельно.
Очень желательно в теме делать замечания, предложения, советы как можно ниже к земле, исходя из возможности практической реализации. Нет, можете предлагать применить даже фотонные двигатели, но несмотря на то, что я железнодорожник, тем не менее, являюсь Главным конструктором и вносить изменения в конструкцию буду только по своему усмотрению!")
Тема: «Тягомерный стенд с карданным подвесом». Открыл тему Non-conformist в 2013г. Вопросы по данной тематике у участников нашего форума вызывали интерес, но обсуждение решений практической реализации сводилось лишь к обозначению имеющихся проблем.
Для управления моделями ракет, в частности для выдерживания вертикального старта, необходимы датчики положения ракеты в пространстве, для этого служат гироскопы. Однако для нас доступны лишь дешевые гражданские MEMS гироскопы типа GY-521.
ОПИСАНИЕ
Микросхема: MPU-6050 (гироскоп 3-осевой + акселерометр на три координаты)
Напряжение питания модуля: от 3,3V до 5V (DC);
Чип MPU-6050: 16 битный АЦП, 16-ти битный вывод данных;
Гироскоп диапазон: ± 250 500 1000 2000 ° / с
Акселерометр диапазон: ± 2 ± 4 ± 8 ± 16g
Связь c контроллером по стандартному коммуникационному протоколу IIC (I2C).
Однако гироскопы выдают не угол поворота, а угловую скорость, из которой интегрированием получают угол поворота. При этом шумы микрофонного эффекта, собственные шумы гироскопа, неточности при интегрировании приводят к ошибкам, так называемым ошибкам накопления. То есть если повернуть MEMS гироскоп на некоторый угол, то при возврате он покажет исходный ноль с некоторой ошибкой.
По этой причине для позиционирования использовать только одни гироскопы не представляется возможны. В системах, где необходима гиростабилизация, гироскопы используются совместно с акселерометрами (для коррекции ошибок), но это в условиях отсутствия заметных ускорений. Причем подобная коррекция возможна только для осей X и Y, а вот по вертикальной оси Z нет.
Тем не менее, мы видим, что в летательных аппаратах (квадрокоптеры, 2D стабилизаторы моделей самолетов и вертолетов), где используются подобные MEMS гироскопы, проблем со стабилизацией нет, при наличии значительных разнонаправленных ускорений. В связи с этим мне пришла в голову мысль проверить работоспособность MEMS гироскопов MPU-6050 (модуль GY-521) при условии совместной работы с акселерометрами. При этом оси X(тангаж) и Y (рыскание) будут с коррекцией, а по оси Z (крен) будет работать только один гироскоп. Для исключения влияния ошибок оси Z на оси X и Y не используется микс, а руль крена установлен отдельно.
Очень желательно в теме делать замечания, предложения, советы как можно ниже к земле, исходя из возможности практической реализации. Нет, можете предлагать применить даже фотонные двигатели, но несмотря на то, что я железнодорожник, тем не менее, являюсь Главным конструктором и вносить изменения в конструкцию буду только по своему усмотрению!
")


...
Брат-2> .... проверить работоспособность MEMS гироскопов MPU-6050 (модуль GY-521) при условии совместной работы с акселерометрами. ....
Предоставляю общий вид головной управляемой части ракеты-демонстратора (в процессе изготовления). Головная часть Ǿ 80мм, L=350мм. изготовлена из 4-х слоев ватмана на клее Титан. Носовой обтекатель из пенополистирола. Основная часть ракеты и двигательный отсек - Ǿ 50мм. Тоже из ватмана. Расчетный вес головной части 550гр.
Брат-2> .... проверить работоспособность MEMS гироскопов MPU-6050 (модуль GY-521) при условии совместной работы с акселерометрами. ....
Предоставляю общий вид головной управляемой части ракеты-демонстратора (в процессе изготовления). Головная часть Ǿ 80мм, L=350мм. изготовлена из 4-х слоев ватмана на клее Титан. Носовой обтекатель из пенополистирола. Основная часть ракеты и двигательный отсек - Ǿ 50мм. Тоже из ватмана. Расчетный вес головной части 550гр.
Прикреплённые файлы:
Брат-2> Предоставляю ...
Обещал показать работу БРЭО к концу недели, показываю, даже раньше! Это работа руля по крену, чистый гироскоп без коррекции, да не очень он и сбивается. Возможный небольшой поворот по крену для вертикального старта не критичен.
Обещал показать работу БРЭО к концу недели, показываю, даже раньше!
Это работа руля по крену, чистый гироскоп без коррекции, да не очень он и сбивается. Возможный небольшой поворот по крену для вертикального старта не критичен.
Прикреплённые файлы:
Z.mp4 (скачать)
[4 МБ]
Брат-2>> Предоставляю ...
...
А это ось Х (синие рули). Угол рулей ограничен 20 градусами. Рули, при изменении положения корпуса ракеты стремятся к по направлению к земле.
...
А это ось Х (синие рули). Угол рулей ограничен 20 градусами. Рули, при изменении положения корпуса ракеты стремятся к по направлению к земле.
Прикреплённые файлы:
Х.mp4 (скачать)
[2.9 МБ]
Брат-2>>> Предоставляю ...
А это соответственно ось Y (зеленые рули). Перемещение рулей малозаметно, угол то небольшой, может надо установить ±30 градусов. А если наклонять в направлении между рулями, то реагируют рули обеих осей.
А это соответственно ось Y (зеленые рули). Перемещение рулей малозаметно, угол то небольшой, может надо установить ±30 градусов. А если наклонять в направлении между рулями, то реагируют рули обеих осей.
Прикреплённые файлы:
Y.mp4 (скачать)
[2.7 МБ]
Брат-2>>>> Предоставляю ...
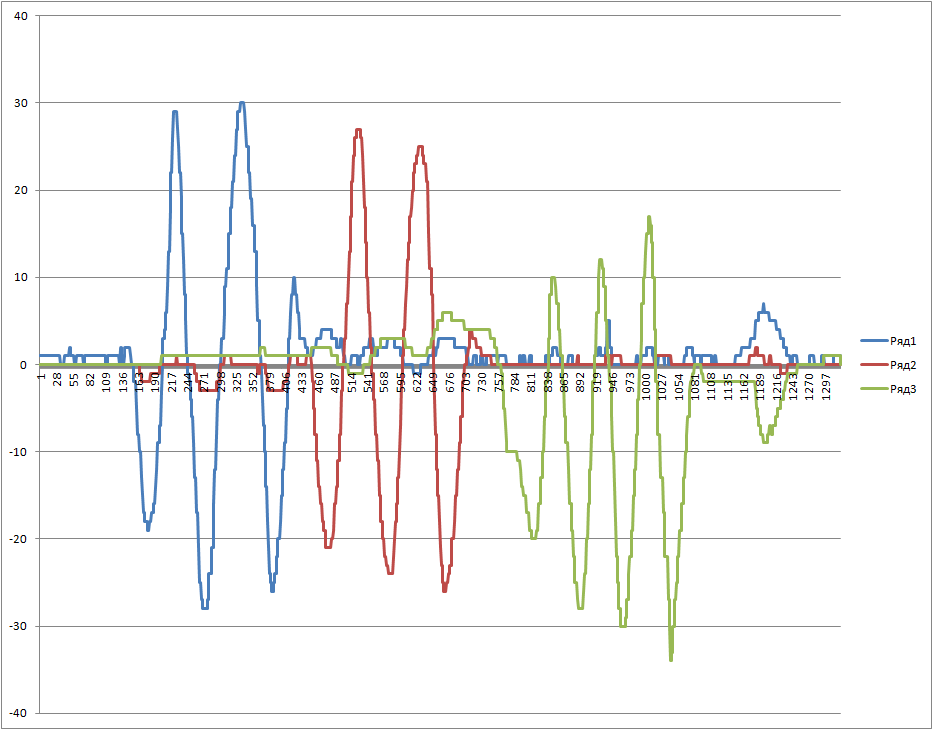
Так выглядят записанные данные углов наклона корпуса ракеты по осям X,Y и Z . Кроме этого фиксируются данные высоты полета, момента выброса и величина ускорения.
Так выглядят записанные данные углов наклона корпуса ракеты по осям X,Y и Z . Кроме этого фиксируются данные высоты полета, момента выброса и величина ускорения.
Прикреплённые файлы:
Брат-2> Головная часть Ǿ 80мм, L=350мм.
Вынеси рули как можно выше.
Сервы могут внизу остаться, сделай длинные тяги к рулям.
Вынеси рули как можно выше.
Сервы могут внизу остаться, сделай длинные тяги к рулям.


Зачётная работа! Ввиду своей безграмотности, задам пару глыпых вопросов. Руль по крену (белый, внизу) не повлияет ли на тангаж и рысканье? И как вся эта система себя поведёт при смене знака ускорения, когда мотор отработает?


Xan> Вынеси рули как можно выше.
Xan> Сервы могут внизу остаться, сделай длинные тяги к рулям.
Да, Хан, твои рекомендации принимаю, да и помню ранее сделанные. Но показанный мной головной блок лишь ракеты демонстратора. Почему низко рули. Так их поведение снимает камера, которая выше. Да, опасаюсь удара от возможного падения, как то надо, что-то уберечь. А какая проблема, у меня просто большая площадь рулей, а сервы по усилиям меня не ограничивают. Использование тяг приведет к дополнительным люфтам, буду переделывать и свой механизм рулей. В моей конструкции тяги проходят через пазы в сошках (нет полной соосности осей серв и опор тяг). Во-первых, есть люфты, во-вторых, есть трение между сошкой и тягой, да и края паза в сошке не совсем ровные, возникают не критичные микрозаедания. Да и рули у меня полностью скомпенсированы, по твоему совету ось вынесу вперед линии симметрии, тоже переделаю.
Xan> Сервы могут внизу остаться, сделай длинные тяги к рулям.
Да, Хан, твои рекомендации принимаю, да и помню ранее сделанные. Но показанный мной головной блок лишь ракеты демонстратора. Почему низко рули. Так их поведение снимает камера, которая выше. Да, опасаюсь удара от возможного падения, как то надо, что-то уберечь. А какая проблема, у меня просто большая площадь рулей, а сервы по усилиям меня не ограничивают. Использование тяг приведет к дополнительным люфтам, буду переделывать и свой механизм рулей. В моей конструкции тяги проходят через пазы в сошках (нет полной соосности осей серв и опор тяг). Во-первых, есть люфты, во-вторых, есть трение между сошкой и тягой, да и края паза в сошке не совсем ровные, возникают не критичные микрозаедания. Да и рули у меня полностью скомпенсированы, по твоему совету ось вынесу вперед линии симметрии, тоже переделаю.
Прикреплённые файлы:
Nec> ... Руль по крену (белый, внизу) не повлияет ли на тангаж и рысканье? И как вся эта система себя поведёт при смене знака ускорения, когда мотор отработает?
Работа, как бы в самом начале! Да, забыл отметить, место расположения руля Z лишь для демонстрации работоспособности. Руль будет расположен еще ниже по корпусу ракеты, в центре давления! Изначально руль был расположен на голове, в механизме рулей видна третья серва, это для Z. Вот именно из-за эффекта паразитного подруливания руль перенес в Ц.Д. Управление должно работать до апогея, а далее на парашюте.
Работа, как бы в самом начале!
Да, забыл отметить, место расположения руля Z лишь для демонстрации работоспособности. Руль будет расположен еще ниже по корпусу ракеты, в центре давления! Изначально руль был расположен на голове, в механизме рулей видна третья серва, это для Z. Вот именно из-за эффекта паразитного подруливания руль перенес в Ц.Д. Управление должно работать до апогея, а далее на парашюте.
Брат-2> Работа, как бы в самом начале! ...
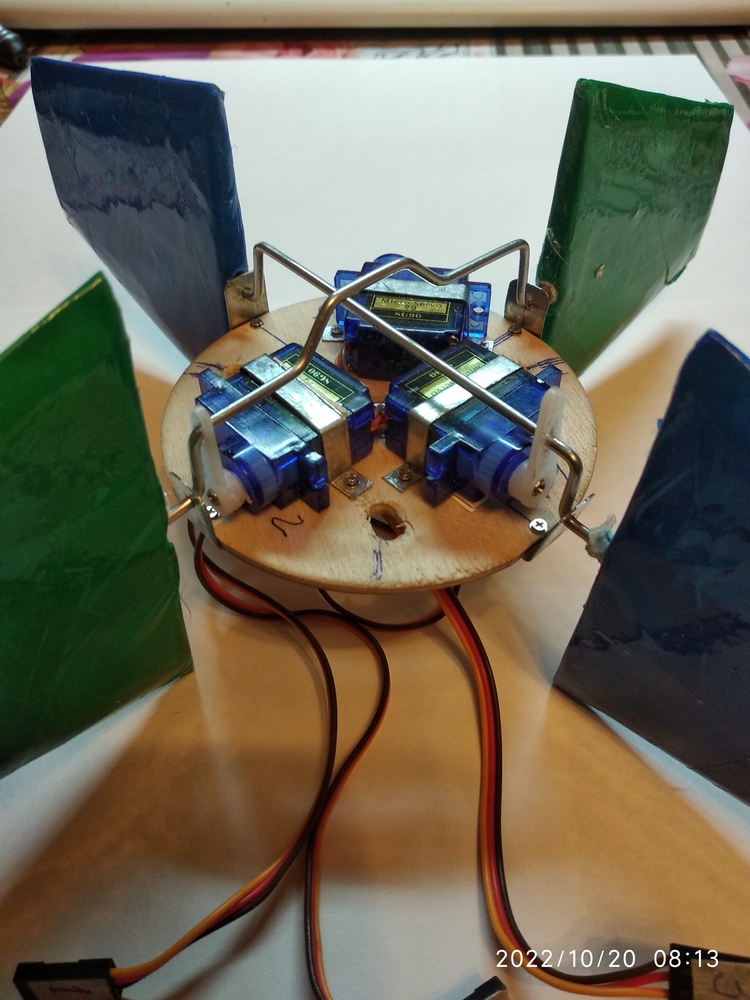
Общий вид конструкции БРЭО. Три монументальных столба – попытка защиты плат от удара при возможном падении. Одного бы хватило, на который нанизать круглые основы для плат, но мне был нужен свободный центр для MPU6050. Пытался создать конструкцию для свободного доступа ко всем элементам схемы, это же лаборатория! Если дойдет дело до настоящей ракеты, то реализую в 50-ти мм диаметре корпуса, при этом сам блок БРЭО будет расположен в месте установки руля Z, то есть в центре корпуса ракеты.
Верхний ярус, камера и плата питания. Второй, основа для плат высотомера и регистратора. Третий, чисто гиро, нижний, механизм рулей.
Лампочка на проводках- эмулятор запала двигателя.
...Общий вид конструкции БРЭО. Три монументальных столба – попытка защиты плат от удара при возможном падении. Одного бы хватило, на который нанизать круглые основы для плат, но мне был нужен свободный центр для MPU6050. Пытался создать конструкцию для свободного доступа ко всем элементам схемы, это же лаборатория! Если дойдет дело до настоящей ракеты, то реализую в 50-ти мм диаметре корпуса, при этом сам блок БРЭО будет расположен в месте установки руля Z, то есть в центре корпуса ракеты.
Верхний ярус, камера и плата питания. Второй, основа для плат высотомера и регистратора. Третий, чисто гиро, нижний, механизм рулей.
Лампочка на проводках- эмулятор запала двигателя.
Прикреплённые файлы:
Это сообщение редактировалось 20.10.2022 в 09:44
Брат-2> Общий вид конструкции БРЭО.
Вот не понимаю я, зачем народ платы делает перпендикулярными оси ракеты.
Хитрой формы, чтоб вписаться в круг.
Проще же сделать их вдоль оси. И прямоугольными, любой длины.
И доступ к поверхности плат будет проще.
И продольные ускорения их гнуть не будут.
Вот не понимаю я, зачем народ платы делает перпендикулярными оси ракеты.
Хитрой формы, чтоб вписаться в круг.
Проще же сделать их вдоль оси. И прямоугольными, любой длины.
И доступ к поверхности плат будет проще.
И продольные ускорения их гнуть не будут.

Брат-2>> Работа, как бы в самом начале! ...
Брат-2> Общий вид конструкции БРЭО.
КЛАСС!!!!!
а зачем руль по Z? чтоб не вращалась? да фиг бы с ней - авось XY справятся...
а ПО уже "вылизал"? Это ж здесь самое интересное...
...Брат-2> Общий вид конструкции БРЭО.
КЛАСС!!!!!
а зачем руль по Z? чтоб не вращалась? да фиг бы с ней - авось XY справятся...
а ПО уже "вылизал"? Это ж здесь самое интересное...

Брат-2> Вот именно из-за эффекта паразитного подруливания руль перенес в Ц.Д. Управление должно работать до апогея, а далее на парашюте.
Помнится, как то раз приклеил один стабилизатор под углом. Буквально, на 15см длины, 1мм в сторону от продольной оси. Получил спираль в полете. Это в тему руля вращения.
А в тему смены знака ускорения, спрошу по другому. Если вашу конструкцию перевернуть вверх ногами, рули все равно будут стремиться ловить вертикаль?
Помнится, как то раз приклеил один стабилизатор под углом. Буквально, на 15см длины, 1мм в сторону от продольной оси. Получил спираль в полете. Это в тему руля вращения.
А в тему смены знака ускорения, спрошу по другому. Если вашу конструкцию перевернуть вверх ногами, рули все равно будут стремиться ловить вертикаль?
apakhom> а зачем руль по Z? чтоб не вращалась? да фиг бы с ней - авось XY справятся...
Вот смотри.
Летит лётчик в тумане, смотрит на гироскоп по тангажу и видит, что нос задрался.
Он толкает ручку от себя.
А в это время самолёт вращается на 90 градусов по крену.
В результате отклонение по тангажу не компенсировано, зато самоль помчался куда-то в сторону.
То есть, если позволять ракете вращаться по крену и сделать управление независимое по каждой другой оси, то получится херня.
Чтоб получить правильную инфу об ориентации, надо смотреть одновременно на все три оси гироскопов и вычислять вращение ракеты через кватернионы (например).С двойным интегрированием.
И уже тогда, зная точную ориентацию, крутить рули.
Или надо жёстко пресечь вращение ракеты вокруг оси, и тогда по другим осям можно рулить независимо.
Вот смотри.
Летит лётчик в тумане, смотрит на гироскоп по тангажу и видит, что нос задрался.
Он толкает ручку от себя.
А в это время самолёт вращается на 90 градусов по крену.
В результате отклонение по тангажу не компенсировано, зато самоль помчался куда-то в сторону.
То есть, если позволять ракете вращаться по крену и сделать управление независимое по каждой другой оси, то получится херня.
Чтоб получить правильную инфу об ориентации, надо смотреть одновременно на все три оси гироскопов и вычислять вращение ракеты через кватернионы (например).
И уже тогда, зная точную ориентацию, крутить рули.
Или надо жёстко пресечь вращение ракеты вокруг оси, и тогда по другим осям можно рулить независимо.
Это сообщение редактировалось 20.10.2022 в 14:20

Xan> Чтоб получить правильную инфу об ориентации, надо смотреть одновременно на все три оси гироскопов и вычислять вращение ракеты через кватернионы (например). С двойным интегрированием.
Почему двойным? Кватернионы из угловых скоростей получаются одинарным интегрированием, правда, не очень тривиально. Но накопление ошибки растёт медленно.
Xan> И уже тогда, зная точную ориентацию, крутить рули.
Xan> Или надо жёстко пресечь вращение ракеты вокруг оси, и тогда по другим осям можно рулить независимо.
Вообще-то, можно и не жёстко, т.е. отклонение, сравнимое с возможной накопленной ошибкой, не влияет.
я считал, как ошибка в крене вызывает проникание программного разворота по тангажу в канал рыскания, оказалось, вполне терпимо, то есть, ошибка по крену может быть в 2-3 раза больше, чем по тангажу.
Почему двойным? Кватернионы из угловых скоростей получаются одинарным интегрированием, правда, не очень тривиально. Но накопление ошибки растёт медленно.
Xan> И уже тогда, зная точную ориентацию, крутить рули.
Xan> Или надо жёстко пресечь вращение ракеты вокруг оси, и тогда по другим осям можно рулить независимо.
Вообще-то, можно и не жёстко, т.е. отклонение, сравнимое с возможной накопленной ошибкой, не влияет.
я считал, как ошибка в крене вызывает проникание программного разворота по тангажу в канал рыскания, оказалось, вполне терпимо, то есть, ошибка по крену может быть в 2-3 раза больше, чем по тангажу.
Б.г.> Почему двойным?
Это старческий маразм даёт о себе знать!!!
Б.г.> Вообще-то, можно и не жёстко,
Это понятно. Ещё можно примитивные поправки делать.
"Жёстко" — это в ответ на "да фиг бы с ней - авось XY справятся".
Это старческий маразм даёт о себе знать!!!

Б.г.> Вообще-то, можно и не жёстко,
Это понятно. Ещё можно примитивные поправки делать.
"Жёстко" — это в ответ на "да фиг бы с ней - авось XY справятся".

Tayfur
втянувшийся
apakhom> а ПО уже "вылизал"? Это ж здесь самое интересное...
Где-то, где описывалось как собрать самолёт/квадрокоптер, натыкался на предупреждение "нефиг изобретать велосипед".
Суть тамошнего текста:
Есть уже готовые прошивки с учётом всяких отклонений, инерций и остального. Нужно в прошивках флажками выставить суть летательной модели.
Думаю, в случае ракеты нужно прошивку самолёта и задать вертикальный полёт по "автопилоту".
Где-то, где описывалось как собрать самолёт/квадрокоптер, натыкался на предупреждение "нефиг изобретать велосипед".
Суть тамошнего текста:
Есть уже готовые прошивки с учётом всяких отклонений, инерций и остального. Нужно в прошивках флажками выставить суть летательной модели.
Думаю, в случае ракеты нужно прошивку самолёта и задать вертикальный полёт по "автопилоту".

Xan> Вот не понимаю я, зачем народ платы делает перпендикулярными оси ракеты.
....
Хороший вопрос, на который у меня нет ответа. Всегда делал плоские и вдоль. Вот теперь у самого сомнения в целесообразности выбора подобной конфигурации. Теперь уже пусть остается так.
....
Хороший вопрос, на который у меня нет ответа. Всегда делал плоские и вдоль. Вот теперь у самого сомнения в целесообразности выбора подобной конфигурации. Теперь уже пусть остается так.
...
apakhom> а зачем руль по Z? чтоб не вращалась? да фиг бы с ней - авось XY справятся...
...
Да, конечно, вращение не критично, но если есть возможность, то почему бы нет!
apakhom> а зачем руль по Z? чтоб не вращалась? да фиг бы с ней - авось XY справятся...
...
Да, конечно, вращение не критично, но если есть возможность, то почему бы нет!
...
Nec> А в тему смены знака ускорения, спрошу по другому. Если вашу конструкцию перевернуть вверх ногами, рули все равно будут стремиться ловить вертикаль?
Если честно, без понятия, да и знать зачем?
Nec> А в тему смены знака ускорения, спрошу по другому. Если вашу конструкцию перевернуть вверх ногами, рули все равно будут стремиться ловить вертикаль?
Если честно, без понятия, да и знать зачем?
....
Xan> Вот смотри.
Xan> Летит лётчик в тумане, смотрит на гироскоп по тангажу и видит, что нос задрался.
Xan> Он толкает ручку от себя.
Xan> А в это время самолёт вращается на 90 градусов по крену.
Xan> В результате отклонение по тангажу не компенсировано, зато самоль помчался куда-то в сторону.
Xan> То есть, если позволять ракете вращаться по крену и сделать управление независимое по каждой другой оси, то получится херня.
....
Да, ну, как то не так! Уже и сам запутался, но при вращении и наклоне рули X, Y отрабатывают адекватно, по крайней мере, на вид! Завтра верну механизм рулей на место, увеличу предельные углы для наглядности, ну и покажу!
Xan> Вот смотри.
Xan> Летит лётчик в тумане, смотрит на гироскоп по тангажу и видит, что нос задрался.
Xan> Он толкает ручку от себя.
Xan> А в это время самолёт вращается на 90 градусов по крену.
Xan> В результате отклонение по тангажу не компенсировано, зато самоль помчался куда-то в сторону.
Xan> То есть, если позволять ракете вращаться по крену и сделать управление независимое по каждой другой оси, то получится херня.
....
Да, ну, как то не так! Уже и сам запутался, но при вращении и наклоне рули X, Y отрабатывают адекватно, по крайней мере, на вид! Завтра верну механизм рулей на место, увеличу предельные углы для наглядности, ну и покажу!
Б.г.> я считал, как ошибка в крене вызывает проникание программного разворота по тангажу в канал рыскания, оказалось, вполне терпимо, то есть, ошибка по крену может быть в 2-3 раза больше, чем по тангажу.
В теории по осям X и Y ошибки накопления не должно быть вообще, для ее исправления используются акселерометры, но это хорошо без продольного ускорения, что будет при ускорении один из вопросов эксперимента. Ну, а по Z ошибка накопления есть, так как чистый гироскоп, поэтому и допускаю половину оборота на весь полет.
В теории по осям X и Y ошибки накопления не должно быть вообще, для ее исправления используются акселерометры, но это хорошо без продольного ускорения, что будет при ускорении один из вопросов эксперимента. Ну, а по Z ошибка накопления есть, так как чистый гироскоп, поэтому и допускаю половину оборота на весь полет.
Tayfur> Где-то, где описывалось как собрать самолёт/квадрокоптер, натыкался на предупреждение "нефиг изобретать велосипед".
Что сказать, дерзай!
Что сказать, дерзай!
Реклама Google — средство выживания форумов :)
Tayfur>> Где-то, где описывалось как собрать самолёт/квадрокоптер, натыкался на предупреждение "нефиг изобретать велосипед".
Брат-2> Что сказать, дерзай!
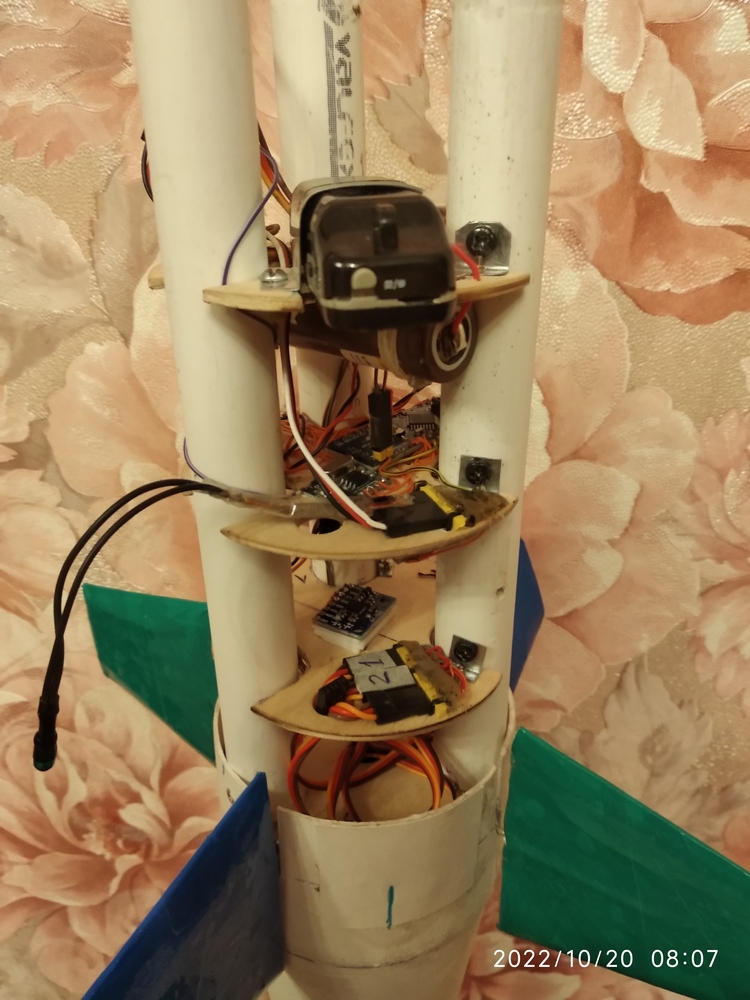
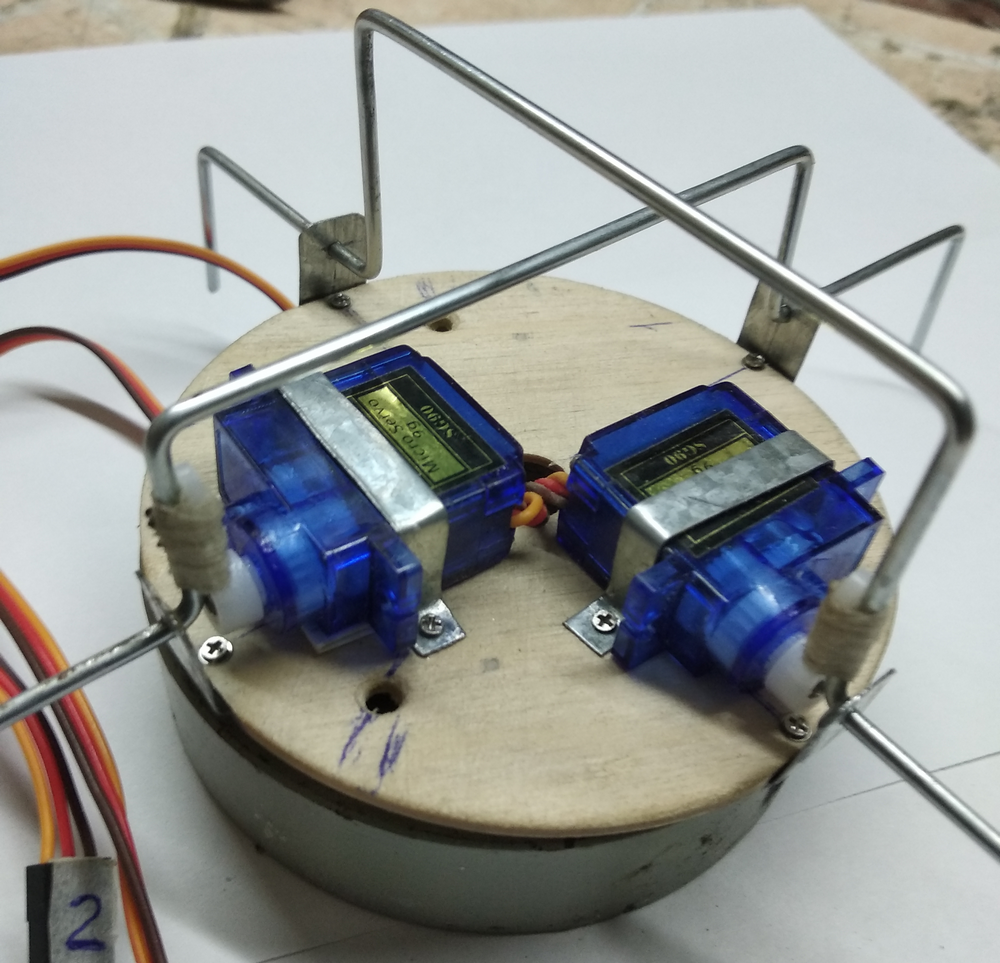
Переделал механизм привода рулей управления. В старом механизме было две проблемы. Во-первых, был повышенный люфт рулей и заедания в сошках. Во-вторых, оси для рулей были просто ровные спицы. Предполагал, что сами рули посажу на клей. Однако, при усилии рули на осях начинали проворачиваться.
В новом механизме сошку сервы примотал наглухо к тяге нитками, пропитал циакрином. Увеличил высоту соединительных тяг, теперь возможный максимальный угол поворота рулей ±45 градусов. Оси – спицы согнул буквой Г, теперь вклеенный руль гарантированно неподвижен относительно оси.
Все стало хорошо!
Брат-2> Что сказать, дерзай!
Переделал механизм привода рулей управления. В старом механизме было две проблемы. Во-первых, был повышенный люфт рулей и заедания в сошках. Во-вторых, оси для рулей были просто ровные спицы. Предполагал, что сами рули посажу на клей. Однако, при усилии рули на осях начинали проворачиваться.
В новом механизме сошку сервы примотал наглухо к тяге нитками, пропитал циакрином. Увеличил высоту соединительных тяг, теперь возможный максимальный угол поворота рулей ±45 градусов. Оси – спицы согнул буквой Г, теперь вклеенный руль гарантированно неподвижен относительно оси.
Все стало хорошо!
Прикреплённые файлы:
Copyright © Balancer 1997..2025
Создано 19.10.2022
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 19.10.2022
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
