 Бывший генералиссимус
Бывший генералиссимус
 инфо
инфо инструменты
инструменты
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/45520/128x128-crop/45520_original.png)
Стабилизация Активная – попытка практической реализации.
Активная гировертикаль.Теги:

Б.г.>> Акселерометры в ракете не чувствуют ничего, кроме аэродинамических сил и проекции тяги мотора, если она отклонена от оси.
Nec> Иными словами, разве "g" не накладывает свой "отпечаток" в общих показаниях?
1. Предположим, что атмосферы нет, и двигатель выключен. Ракета падает на землю с начальной высоты h0, с точки зрения наземного наблюдателя двигаясь всё быстрее и быстрее. Что показывает акселерометр в такой ракете?
2. Предположим, допадав до высоты h1, мы включаем двигатель. Масса ракеты m, тяга двигателя F. Что покажет акселерометр, если тяга направлена вверх? А если вниз? А если вбок?
Nec> Иными словами, разве "g" не накладывает свой "отпечаток" в общих показаниях?
1. Предположим, что атмосферы нет, и двигатель выключен. Ракета падает на землю с начальной высоты h0, с точки зрения наземного наблюдателя двигаясь всё быстрее и быстрее. Что показывает акселерометр в такой ракете?
2. Предположим, допадав до высоты h1, мы включаем двигатель. Масса ракеты m, тяга двигателя F. Что покажет акселерометр, если тяга направлена вверх? А если вниз? А если вбок?



Вот мне, почему то, кажется, что должно G влиять на показания акселерометра. Поэтому и вынюхиваю у знающих. Предположим, если мы поставим два акселерометра "елочкой" в продольной оси рекеты,под углом 45* к ней. Будет ли так, что завалившись набок, один акселерометр покажет больше другого, при условии, что тяга мотора сохранится неизменной?


Nec> Вот мне, почему то, кажется, что должно G влиять на показания акселерометра.
Вот и мне казалось!")
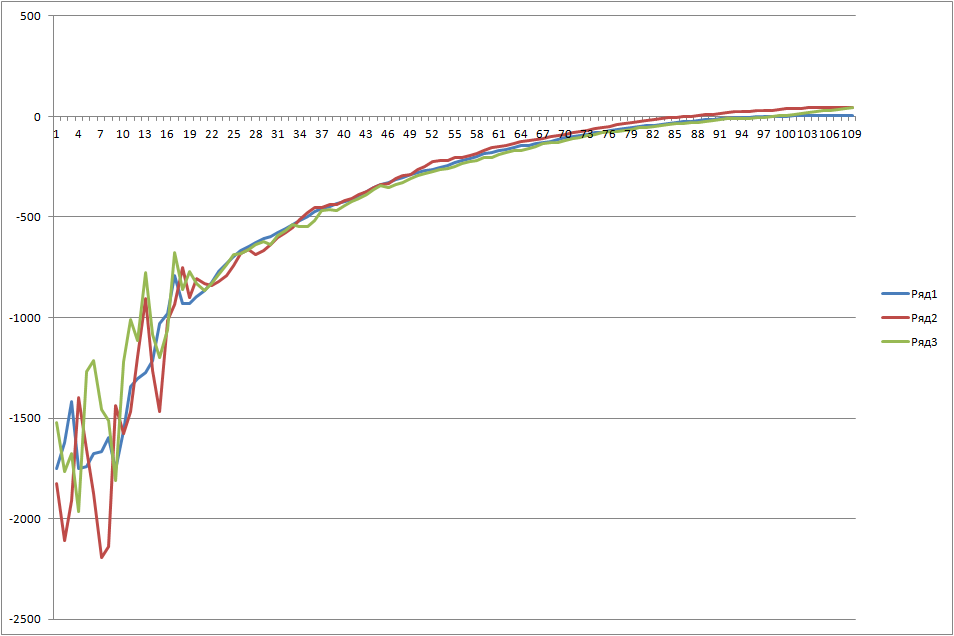
Но зачем елочкой! Там кроме акселерометра Z, который вертикально и показывает земные 9g, есть еще и по осям X и Y, при строго вниз они показывают 0 (условно), а при наклонах + или -. График ускорений по всем осям дополнительного акселерометра ADXL 335 где: ось Z (ряд1), ось Х (ряд2), ось Y (ряд3). Как видишь X и Y что-то показывают, но это пока действует сила (неважно какая) по оси Z. В этих условиях есть, пусть и не убедительные, признаки работы гиростабилизации. Да, но это до высоты 60-80м (конкретно для моего старта). А вот далее видно, что акселерометры по всем осям уже ничего не показывают и работа системы полностью нарушается.
Вот и мне казалось!
")
Но зачем елочкой! Там кроме акселерометра Z, который вертикально и показывает земные 9g, есть еще и по осям X и Y, при строго вниз они показывают 0 (условно), а при наклонах + или -. График ускорений по всем осям дополнительного акселерометра ADXL 335 где: ось Z (ряд1), ось Х (ряд2), ось Y (ряд3). Как видишь X и Y что-то показывают, но это пока действует сила (неважно какая) по оси Z. В этих условиях есть, пусть и не убедительные, признаки работы гиростабилизации. Да, но это до высоты 60-80м (конкретно для моего старта). А вот далее видно, что акселерометры по всем осям уже ничего не показывают и работа системы полностью нарушается.
Прикреплённые файлы:

Nec> Вот мне, почему то, кажется, что должно G влиять на показания акселерометра. Поэтому и вынюхиваю у знающих. Предположим, если мы поставим два акселерометра "елочкой" в продольной оси рекеты,под углом 45* к ней. Будет ли так, что завалившись набок, один акселерометр покажет больше другого, при условии, что тяга мотора сохранится неизменной?
Нет. Только из-за сопротивления воздуха и наличия угла атаки (угла между скоростью движения ракеты и продольной осью).
Ракета, оторвавшись от стартового стола, перестаёт "чувствовать" "же", потому что оно влияет на корпус ракеты в точности так же, как на чувствительный элемент акселерометра.
То есть, если масса ракеты 1 кг, а тяга движка 98 Ньютон, то, с точки зрения акселерометра, ракета будет двигаться с ускорением в 10 "же" (хотя, по измерениям с помощью видеокамеры, мы получим 9 "же", если ракета летит вверх, а факел выхлопа направлен вниз, и 11 "же", если ракета летит вниз, и факел выхлопа направлен вверх).
Нет. Только из-за сопротивления воздуха и наличия угла атаки (угла между скоростью движения ракеты и продольной осью).
Ракета, оторвавшись от стартового стола, перестаёт "чувствовать" "же", потому что оно влияет на корпус ракеты в точности так же, как на чувствительный элемент акселерометра.
То есть, если масса ракеты 1 кг, а тяга движка 98 Ньютон, то, с точки зрения акселерометра, ракета будет двигаться с ускорением в 10 "же" (хотя, по измерениям с помощью видеокамеры, мы получим 9 "же", если ракета летит вверх, а факел выхлопа направлен вниз, и 11 "же", если ракета летит вниз, и факел выхлопа направлен вверх).
Брат-2> Вот и мне казалось!
...
У меня парашют не был выброшен, данные после переворота как показано. Что удивительно при этом рули опять начинают работать. Но после окончания работы двигателя и до апогея система не работоспособна. Да и работоспособный участок так можно назвать с большим натягом, ведь акселерометры, да и гироскопы выдают очень грязные данные.
...
У меня парашют не был выброшен, данные после переворота как показано. Что удивительно при этом рули опять начинают работать. Но после окончания работы двигателя и до апогея система не работоспособна. Да и работоспособный участок так можно назвать с большим натягом, ведь акселерометры, да и гироскопы выдают очень грязные данные.
Прикреплённые файлы:
Б.г.> То есть, если масса ракеты 1 кг, а тяга движка 98 Ньютон, то, с точки зрения акселерометра, ракета будет двигаться с ускорением в 10 "же" (хотя, по измерениям с помощью видеокамеры, мы получим 9 "же", если ракета летит вверх, а факел выхлопа направлен вниз, и 11 "же", если ракета летит вниз, и факел выхлопа направлен вверх).
С движением вверх - вниз все прекрасно. Тяжело представить движение вбок и влияние силы притяжения. Спасибо за ответ, есть над чем подумать
С движением вверх - вниз все прекрасно. Тяжело представить движение вбок и влияние силы притяжения. Спасибо за ответ, есть над чем подумать
Это сообщение редактировалось 11.11.2022 в 18:50
Брат-2> Но зачем елочкой!
Чтобы сравнивать показания двух, а лучше нескольких, акселерометров. Чтобы тяга двигателя, торможение воздухом, вращение действовали на них разом и особо не меняли их показания между собой. А виляния вбок размазывали всю картину в показаниях
Чтобы сравнивать показания двух, а лучше нескольких, акселерометров. Чтобы тяга двигателя, торможение воздухом, вращение действовали на них разом и особо не меняли их показания между собой. А виляния вбок размазывали всю картину в показаниях
....
Nec> С движением вверх - вниз все прекрасно. Тяжело представить движение вбок и влияние силы притяжения. Спасибо за ответ, есть над чем подумать
К сожалению, пусть и слабые, но надежды, улетучились как дым, думать больше не над чем, совершенно бесполезно! Вот с одними гироскопами явно просматривался результат, но там непреодолимые проблемы с ошибкой накопления. В принципе по оси Z можно осуществить гиростабилизацию, можно для исправления ошибки использовать компас, а можно просто плюнуть на эту ошибку, ну провернется на пол оборота, не критично. Так подобное не интересно!
Nec> С движением вверх - вниз все прекрасно. Тяжело представить движение вбок и влияние силы притяжения. Спасибо за ответ, есть над чем подумать
К сожалению, пусть и слабые, но надежды, улетучились как дым, думать больше не над чем, совершенно бесполезно! Вот с одними гироскопами явно просматривался результат, но там непреодолимые проблемы с ошибкой накопления. В принципе по оси Z можно осуществить гиростабилизацию, можно для исправления ошибки использовать компас, а можно просто плюнуть на эту ошибку, ну провернется на пол оборота, не критично. Так подобное не интересно!

Брат-2> К сожалению, пусть и слабые, но надежды, улетучились как дым,....
Блин, неймется! При слабом внешнем процессоре есть способ использования внутреннего, MPU6050 таковой имеется, так называемый DMP. Вот там можно получить и углы Эйлера, и кватернионы, считается, что это оптимальный вариант получения данных. Однако суть остается прежней, для коррекции гироскопов используются акселерометры, то есть для наших условий это бесполезно.
Блин, неймется!
При слабом внешнем процессоре есть способ использования внутреннего, MPU6050 таковой имеется, так называемый DMP. Вот там можно получить и углы Эйлера, и кватернионы, считается, что это оптимальный вариант получения данных. Однако суть остается прежней, для коррекции гироскопов используются акселерометры, то есть для наших условий это бесполезно.
Брат-2> Блин, неймется! При слабом внешнем процессоре есть способ использования внутреннего, MPU6050 таковой имеется, так называемый DMP. Вот там можно получить и углы Эйлера, и кватернионы, считается, что это оптимальный вариант получения данных. Однако суть остается прежней, для коррекции гироскопов используются акселерометры, то есть для наших условий это бесполезно.
Для коррекции гироскопов можно использовать солнечный датчик и магнитометр. Вместе они дадут жёсткий трёхосный каркас, тем более точный, чем дальше Солнце от магнитного меридиана. Но тогда в систему понадобится ещё и GPS приёмник - для определения места и времени.
Гироскопы, однако, всё равно будут необходимы - и солнечный, и магнитный датчики сравнительно медленные, а, в цепи управления необходима угловая скорость.
И математика там будет нетривиальная, о, да!
При слабом внешнем процессоре есть способ использования внутреннего, MPU6050 таковой имеется, так называемый DMP. Вот там можно получить и углы Эйлера, и кватернионы, считается, что это оптимальный вариант получения данных. Однако суть остается прежней, для коррекции гироскопов используются акселерометры, то есть для наших условий это бесполезно. Для коррекции гироскопов можно использовать солнечный датчик и магнитометр. Вместе они дадут жёсткий трёхосный каркас, тем более точный, чем дальше Солнце от магнитного меридиана. Но тогда в систему понадобится ещё и GPS приёмник - для определения места и времени.
Гироскопы, однако, всё равно будут необходимы - и солнечный, и магнитный датчики сравнительно медленные, а, в цепи управления необходима угловая скорость.
И математика там будет нетривиальная, о, да!
Б.г.> Для коррекции гироскопов можно использовать солнечный датчик и магнитометр.
Б.г.> И математика там будет нетривиальная, о, да!
Чувство, что вы все знаете, на шаг, на десять шагов вперёд. Знаете как сделать так чтобы работало. Но молчите и ухмыляетесь)
Б.г.> И математика там будет нетривиальная, о, да!
Чувство, что вы все знаете, на шаг, на десять шагов вперёд. Знаете как сделать так чтобы работало. Но молчите и ухмыляетесь)
Б.г.>> Для коррекции гироскопов можно использовать солнечный датчик и магнитометр.
Б.г.>> И математика там будет нетривиальная, о, да!
Nec> Чувство, что вы все знаете, на шаг, на десять шагов вперёд. Знаете как сделать так чтобы работало. Но молчите и ухмыляетесь)
Не молчу. Но у меня нет готового работающего кода. Я могу поделиться, например, тем, что уже написано. Там не очень тривиально - я пишу без плавающей арифметики, с фиксированной точкой. Причём, силы иссякли и я с мая не брался за код. Уже полгода.
Я использую гироскоп средней точности - ADIS16460, - который для большинства ракетолюбителей чересчур дорог (250 долларов!) и довольно специфические методики для калибровки и коррекции нуля (от температуры, от линейного ускорения, и т.д.).
В результате, уход даже на вибростенде не превышает 4,5 градусов за 400 секунд. Но и 4,5 градуса - это очень много, если говорить о "настоящей" ракете. Поэтому у меня предусмотрена коррекция по датчику Солнца.

Б.г.>> И математика там будет нетривиальная, о, да!
Nec> Чувство, что вы все знаете, на шаг, на десять шагов вперёд. Знаете как сделать так чтобы работало. Но молчите и ухмыляетесь)
Не молчу. Но у меня нет готового работающего кода. Я могу поделиться, например, тем, что уже написано. Там не очень тривиально - я пишу без плавающей арифметики, с фиксированной точкой. Причём, силы иссякли и я с мая не брался за код. Уже полгода.
Я использую гироскоп средней точности - ADIS16460, - который для большинства ракетолюбителей чересчур дорог (250 долларов!) и довольно специфические методики для калибровки и коррекции нуля (от температуры, от линейного ускорения, и т.д.).
В результате, уход даже на вибростенде не превышает 4,5 градусов за 400 секунд. Но и 4,5 градуса - это очень много, если говорить о "настоящей" ракете. Поэтому у меня предусмотрена коррекция по датчику Солнца.
Это сообщение редактировалось 12.11.2022 в 23:38
Реклама Google — средство выживания форумов :)
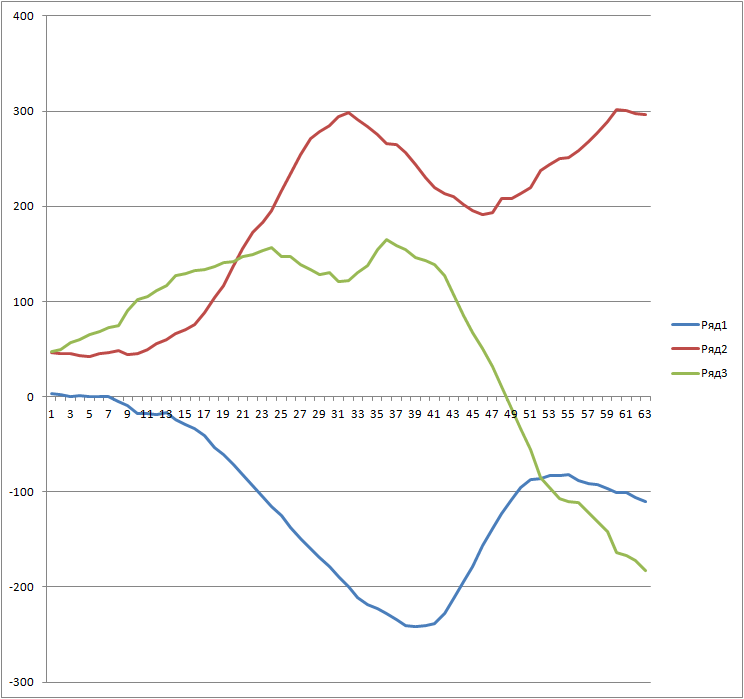
Б.г.> В результате, уход даже на вибростенде не превышает 4,5 градусов за 400 секунд. Но и 4,5 градуса - это очень много, если говорить о "настоящей" ракете. Поэтому у меня предусмотрена коррекция по датчику Солнца.
Вот график с вибростенда.

Приведены компоненты кватерниона. Для малых углов можно считать их углами в радианах, поделенные на два.
То есть, если цифры по вертикальной оси помножить на 114, получатся градусы.
Прошу прощения, предыдущий график был с выключенной вибрацией.
Вот график с вибростенда.

Приведены компоненты кватерниона. Для малых углов можно считать их углами в радианах, поделенные на два.
То есть, если цифры по вертикальной оси помножить на 114, получатся градусы.
Прошу прощения, предыдущий график был с выключенной вибрацией.
Это сообщение редактировалось 12.11.2022 в 23:39
Copyright © Balancer 1997..2025
Создано 19.10.2022
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 19.10.2022
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
