 Mikhal
Mikhal
 инфо
инфо инструменты
инструменты

 apakhom
apakhom
 Сonquista rocket
Сonquista rocket



 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/net/ar/arstechnica/cdn/wp-content/uploads/2013/08/128x128-crop/groupShot.jpg)
Успехи иностранных ракетолюбителей II
Теги:

Mikhal
втянувшийся
П.а.M.> определение момента возникновения апогея.
Это частный случай движения ракеты по траектории. При определённых условиях (ровный вертикальный полёт без вращения с одноразовым ускорением) данных акселерометров будет достаточно. В общем случае (изменение направления движения или скорости вращения) недостаточно.
Это частный случай движения ракеты по траектории. При определённых условиях (ровный вертикальный полёт без вращения с одноразовым ускорением) данных акселерометров будет достаточно. В общем случае (изменение направления движения или скорости вращения) недостаточно.


Mikhal
втянувшийся
EG54> Что такое Метод обратного распространения(отсчета?) ошибок?
На вскидку - метод для настройки весовых коэффициентов при обучении нейросетевых алгоритмов.
А какое отношение к нашему случаю?
На вскидку - метод для настройки весовых коэффициентов при обучении нейросетевых алгоритмов.
А какое отношение к нашему случаю?

П.а.M.>> определение момента возникновения апогея.
Mikhal> Это частный случай движения ракеты по траектории. При определённых условиях (ровный вертикальный полёт без вращения с одноразовым ускорением) данных акселерометров будет достаточно. В общем случае (изменение направления движения или скорости вращения) недостаточно.
Так вот за это и толкуем.
И пока что выходит так, что для определения момента апогея нам ничего кроме одноосного акселерометра не нужно. И это относится и к вертикальному полету, и к полету по наклонной траектории тоже.
Mikhal> Это частный случай движения ракеты по траектории. При определённых условиях (ровный вертикальный полёт без вращения с одноразовым ускорением) данных акселерометров будет достаточно. В общем случае (изменение направления движения или скорости вращения) недостаточно.
Так вот за это и толкуем.
И пока что выходит так, что для определения момента апогея нам ничего кроме одноосного акселерометра не нужно. И это относится и к вертикальному полету, и к полету по наклонной траектории тоже.


Mikhal> При определённых условиях (ровный вертикальный полёт без вращения с одноразовым ускорением) данных акселерометров будет достаточно. В общем случае (изменение направления движения или скорости вращения) недостаточно.
А тем временем:
Пример №1
Пример №2
Пример №3
Пример №4
Пример №5
Пример №6
Пример №7
П.С. По мимо прочих незначительно влияющих факторов на работу одноосевого акселерометра:
моделирование в 3D симуляторе;
расчёт погрешности векторной суммы;
оценка погрешности суммы ускорений.
многоразовое включение - оно же полёт многоступенчатой ракеты, так же ничего не изменит. Или сколько раз ускорится, столько же и затормозится, общая сумма ускорений так же будет равна 0 и только в апогее.
А тем временем:
Пример №1
Пример №2
Пример №3
Пример №4
Пример №5
Пример №6
Пример №7
П.С. По мимо прочих незначительно влияющих факторов на работу одноосевого акселерометра:
моделирование в 3D симуляторе;
расчёт погрешности векторной суммы;
оценка погрешности суммы ускорений.
многоразовое включение - оно же полёт многоступенчатой ракеты, так же ничего не изменит. Или сколько раз ускорится, столько же и затормозится, общая сумма ускорений так же будет равна 0 и только в апогее.
EG54>> Что такое Метод обратного распространения(отсчета?) ошибок?
Mikhal> На вскидку - метод для настройки весовых коэффициентов при обучении нейросетевых алгоритмов.
Mikhal> А какое отношение к нашему случаю?
По-крестьянски подумалось, если ошибки накапливаются в одном направлении, то вероятно их в обратном направлении можно уменьшить. Ведь что накапливается, вроде как известно.
Про "вес" алгоритма -звучит как-то необычно.
Mikhal> На вскидку - метод для настройки весовых коэффициентов при обучении нейросетевых алгоритмов.
Mikhal> А какое отношение к нашему случаю?
По-крестьянски подумалось, если ошибки накапливаются в одном направлении, то вероятно их в обратном направлении можно уменьшить. Ведь что накапливается, вроде как известно.
Про "вес" алгоритма -звучит как-то необычно.

EG54>>> Метод
Оказывается способ сухой варки используется у наших коллег. На 4.47 минуте.
На 7.26 мин использование силиконовой трубки для формирования канала шашки.
И посуда, к которой не прилипает горячая смесь. Удобно.
Casting Sugar Rocket Fuel - Build a KNSB (Sugar) Rocket Motor - Part 5
This is the fifth video in a series where I document building a KNSB-fueled rocket motor from scratch.This video will show the casting of the propellant (fuel) grains. ***This video is for entertainment purposes only, don't try this at home.*** Amazon affiliate links for some of the tools used: Skillet: https://amzn.to/3Ckqiow Silicone Spatula: https://amzn.to/35Hk5Hb Scale: https://amzn.to/3KsEwXo Infrared Thermometer: https://amzn.to/3MtucA1 PTFE Lubricant: https://amzn.to/3hKL9b0 McMaster Carr links to casting tools: Shoulder Bolts: https://www.mcmaster.com/91259A106/ Tubing:…
Оказывается способ сухой варки используется у наших коллег. На 4.47 минуте.
На 7.26 мин использование силиконовой трубки для формирования канала шашки.
И посуда, к которой не прилипает горячая смесь. Удобно.
Casting Sugar Rocket Fuel - Build a KNSB (Sugar) Rocket Motor - Part 5
This is the fifth video in a series where I document building a KNSB-fueled rocket motor from scratch.This video will show the casting of the propellant (fuel) grains. ***This video is for entertainment purposes only, don't try this at home.*** Amazon affiliate links for some of the tools used: Skillet: https://amzn.to/3Ckqiow Silicone Spatula: https://amzn.to/35Hk5Hb Scale: https://amzn.to/3KsEwXo Infrared Thermometer: https://amzn.to/3MtucA1 PTFE Lubricant: https://amzn.to/3hKL9b0 McMaster Carr links to casting tools: Shoulder Bolts: https://www.mcmaster.com/91259A106/ Tubing:…

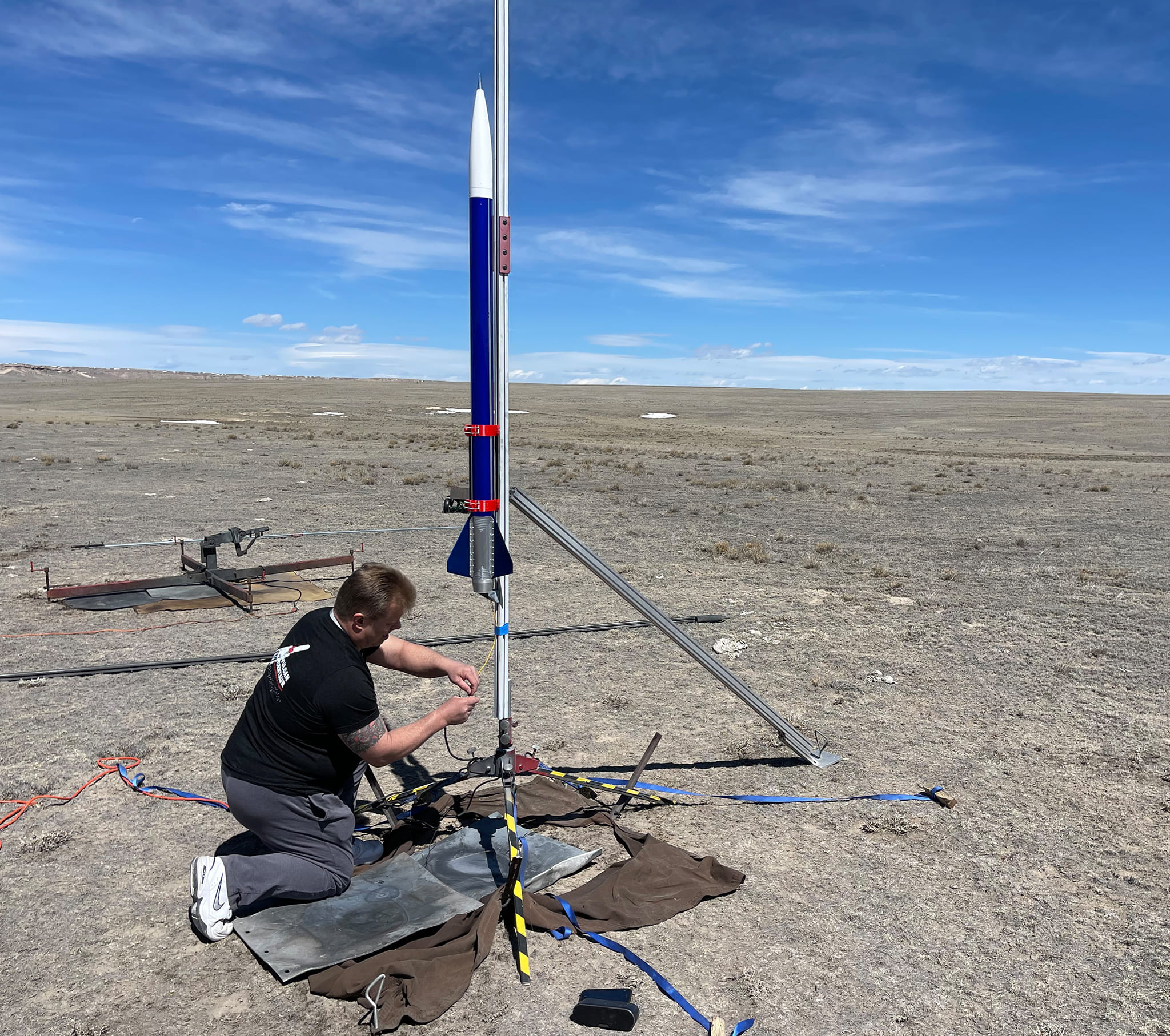
В группе TRA поздравляют Conway L Stevens с успешным запуском (двигатель M1850, диаметр ракеты 75мм, достигнутая высота - около 10км, скорость более 3М, место падения не далее 5 миль).
Приводит 12 фото, жалуется, что была потеря высоты из-за наклона ("внешние зацепы" при "отваливании" ударились по стабилизаторам). Корпус fiberglass.
Интересно посмотреть крепление стабилизаторов, устройство направляющего рельса...


Приводит 12 фото, жалуется, что была потеря высоты из-за наклона ("внешние зацепы" при "отваливании" ударились по стабилизаторам). Корпус fiberglass.
Интересно посмотреть крепление стабилизаторов, устройство направляющего рельса...



Сonquista rocket
Михаил Павлодар
втянувшийся
apakhom> В группе TRA поздравляют Conway L Stevens с успешным запуском (двигатель M1850, диаметр ракеты 75мм, достигнутая высота - около 10км, скорость более 3М, место падения не далее 5 миль).
А ссылку можно?
И сдается мне у соседа его по запуску ракетка помощнее, не афиширует просто") Посмотрите на стартовое
Посмотрите на стартовое
А ссылку можно?
И сдается мне у соседа его по запуску ракетка помощнее, не афиширует просто
") Посмотрите на стартовое
Посмотрите на стартовое
Прикреплённые файлы:
apakhom>> В группе TRA поздравляют Conway L Stevens с успешным запуском (двигатель M1850, диаметр
С.r.> А ссылку можно?
попробуй сюда (надеюсь РКН у вас не работает
С.r.> И сдается мне у соседа его по запуску ракетка помощнее, не афиширует просто Посмотрите на стартовое
... вот тут его запуск 2021 года (чуть ниже). Тут работает установка "соседа"
Spear Of Odin to 28K :Northern Colorado Rocketry 2021 Octoberfest Launch
Flight of my minimum diameter 3 inch High Power Rocket on an M1650 Loki, to 28,142 ft Above Ground Altitude at the Northern Colorado Rocketry 2021Octoberfest Launch at the Pawnee Grasslands. Rocket specs 6 ft tall, 18.8 lbs pad weight, M1650 Motor; Flight to 28,142 ft agl, mach 2.6 on its first test flight.
Пока "ковырялся" наткнулся на красивый запуск
Эффектно стартует двигатель!
И парашютик прикольный - всего 4 стропы, а работает хорошо
С.r.> А ссылку можно?
попробуй сюда (надеюсь РКН у вас не работает

С.r.> И сдается мне у соседа его по запуску ракетка помощнее, не афиширует просто
Посмотрите на стартовое... вот тут его запуск 2021 года (чуть ниже). Тут работает установка "соседа"
Spear Of Odin to 28K :Northern Colorado Rocketry 2021 Octoberfest Launch
Flight of my minimum diameter 3 inch High Power Rocket on an M1650 Loki, to 28,142 ft Above Ground Altitude at the Northern Colorado Rocketry 2021Octoberfest Launch at the Pawnee Grasslands. Rocket specs 6 ft tall, 18.8 lbs pad weight, M1650 Motor; Flight to 28,142 ft agl, mach 2.6 on its first test flight.
Пока "ковырялся" наткнулся на красивый запуск
Эффектно стартует двигатель!
И парашютик прикольный - всего 4 стропы, а работает хорошо
Заокеанские коллеги в очередной раз "залетели в космос"
Evolution Space US сейчас в Ridgecrest, California.
(два дня назад)
We did it. Gold Chain Cowboy has officially achieved Space.
At 8:12am Evolution Space reached the altitude of 408,456 ft (124.5 km) at Mach 5.2.
We are now the 9th privately funded US startup to go beyond the Kármán line.
"Народ" поздравляет с достижением и ждет видео. Вроде обещают...
(вообще, сомнения берут... ракетка какая-то "несолидная")
Evolution Space US сейчас в Ridgecrest, California.
(два дня назад)
We did it. Gold Chain Cowboy has officially achieved Space.
At 8:12am Evolution Space reached the altitude of 408,456 ft (124.5 km) at Mach 5.2.
We are now the 9th privately funded US startup to go beyond the Kármán line.
"Народ" поздравляет с достижением и ждет видео. Вроде обещают...

(вообще, сомнения берут... ракетка какая-то "несолидная")
apakhom> (вообще, сомнения берут... ракетка какая-то "несолидная")
... а так смотрится уже совсем иначе
видео
... а так смотрится уже совсем иначе

видео
Это сообщение редактировалось 24.04.2023 в 21:48
apakhom> Заокеанские коллеги в очередной раз "залетели в космос"
apakhom> At 8:12am Evolution Space reached the altitude of 408,456 ft (124.5 km) at Mach 5.2.
apakhom> "Народ" поздравляет с достижением и ждет видео. Вроде обещают...
На Youtube выложили...
Правда, какое-то малоинформативное...
Mission: Gold Chain Cowboy | Successful Space Launch to 124.5km
Join the team and experience the mission Gold Chain Cowboy as the rocket is launched into space. Mission Details: The launch was successfully conducted on April 22, 2023, at 8:10 am pst - local time (15:10:34 UTC). The rocket reached a max altitude of 124.5 km (408,456 ft) and a max velocity of Mach 5.2.
apakhom> At 8:12am Evolution Space reached the altitude of 408,456 ft (124.5 km) at Mach 5.2.
apakhom> "Народ" поздравляет с достижением и ждет видео. Вроде обещают...
На Youtube выложили...
Правда, какое-то малоинформативное...
Mission: Gold Chain Cowboy | Successful Space Launch to 124.5km
Join the team and experience the mission Gold Chain Cowboy as the rocket is launched into space. Mission Details: The launch was successfully conducted on April 22, 2023, at 8:10 am pst - local time (15:10:34 UTC). The rocket reached a max altitude of 124.5 km (408,456 ft) and a max velocity of Mach 5.2.
Сonquista rocket
Михаил Павлодар
втянувшийся
Старт отличный. Пишут про 3 мировых рекорда. Ракету ещё не нашли....
Deneb Launch Shatters 3 World Records! ???
Cygnus Suborbitals launched the first liquid flight vehicle in ERAU history! Not only was it history for Embry-Riddle, but Deneb also broke the undergraduate, collegiate, and amateur rocketry records! With a burn time of 26.1 seconds and a velocity of 1,150 mph, Deneb cut through the air reaching 47,732 feet!
Deneb Launch Shatters 3 World Records! ???
Cygnus Suborbitals launched the first liquid flight vehicle in ERAU history! Not only was it history for Embry-Riddle, but Deneb also broke the undergraduate, collegiate, and amateur rocketry records! With a burn time of 26.1 seconds and a velocity of 1,150 mph, Deneb cut through the air reaching 47,732 feet!
apakhom> Вчера (FB - TRA) поздравляли парня (Kip Daugirdas) с серьезным достижением
apakhom> I flew my latest rocket to 293,488 ft (that’s 55.6 miles high)
очередное его достижение (около 30км) уже как-то и не смотрится...
Flew MESOS again at FAR this past weekend. Unfortunately the 2nd-stage experienced some intense pitch-roll coupling halfway through its burn traveling at over Mach 3. This severely limited the apogee (94,000 ft). However, both stages were recovered with no damage approximately 1.5 miles away. I’ll have more updates and a video about the flight in the coming weeks. Thank you Matt Dahle for these awesome pictures, lending a hand, and the great company on the long drive.
Kip Daugirdas


apakhom> I flew my latest rocket to 293,488 ft (that’s 55.6 miles high)
очередное его достижение (около 30км) уже как-то и не смотрится...
Flew MESOS again at FAR this past weekend. Unfortunately the 2nd-stage experienced some intense pitch-roll coupling halfway through its burn traveling at over Mach 3. This severely limited the apogee (94,000 ft). However, both stages were recovered with no damage approximately 1.5 miles away. I’ll have more updates and a video about the flight in the coming weeks. Thank you Matt Dahle for these awesome pictures, lending a hand, and the great company on the long drive.
Kip Daugirdas



Мне одному кажется, что на нижней фотке между критикой и лавалем нехилая ступенька? Или это графитовая вставка создаёт такую иллюзию? И графитовая ли она? И из какого материала сделан раструб сопла? Есть у кого мысли по этому вопросу?

Nec> Мне одному кажется, что на нижней фотке между критикой и лавалем нехилая ступенька? Или это графитовая вставка создаёт такую иллюзию? И графитовая ли она? И из какого материала сделан раструб сопла? Есть у кого мысли по этому вопросу?
Судя по цвету, всем на ум приходит только глина, вставка есть, не исключено, что графит, а вот ступеньки конечно нет.
Судя по цвету, всем на ум приходит только глина, вставка есть, не исключено, что графит, а вот ступеньки конечно нет.
Брат-2> Судя по цвету, всем на ум приходит только глина, ....
Была передача про ракеты для установок «Ураган» и «Смерч», в них для сопла использовался специальный пластик, в виде пучка соломы, из которого под большим давлением формировалось сопло, цвет готового сопла примерно как на фото. Правда, без вставки.
Была передача про ракеты для установок «Ураган» и «Смерч», в них для сопла использовался специальный пластик, в виде пучка соломы, из которого под большим давлением формировалось сопло, цвет готового сопла примерно как на фото. Правда, без вставки.
Nec> Мне одному кажется, что на нижней фотке между критикой и лавалем нехилая ступенька?
Я не вижу, и они так не делают, там всё ровное.
Nec> И графитовая ли она?
Графитовая.
Nec> И из какого материала сделан раструб сопла?
Бакелит стеклонаполненный.
Я не вижу, и они так не делают, там всё ровное.
Nec> И графитовая ли она?
Графитовая.
Nec> И из какого материала сделан раструб сопла?
Бакелит стеклонаполненный.
Nec>> И из какого материала сделан раструб сопла?
SashaMaks> Бакелит стеклонаполненный.
Судя по окраске это обычный текстолит (не путать со стеклотекстолитом).
SashaMaks> Бакелит стеклонаполненный.
Судя по окраске это обычный текстолит (не путать со стеклотекстолитом).
apakhom>> Вчера (FB - TRA) поздравляли парня (Kip Daugirdas) с серьезным достижением
...KipD выложил "шутливое кино"

...KipD выложил "шутливое кино"
Прежде чем перейти к YouTube
Войти в аккаунт компания GoogleМы используем файлы cookie и данные, чтобы:Предоставлять сервисы Google и обеспечивать их работу.Отслеживать сбои и обеспечивать защиту от спама, мошенничества и злоупотреблений.Анализировать вовлеченность аудитории и статистику сайтов, чтобы узнавать, как пользуются нашими сервисами, и улучшать их.Если вы выберете "Принять все", мы также будем использовать файлы cookie и данные, чтобы:Разрабатывать и улучшать новые сервисы.Показывать рекламу и оценивать ее эффективность.Показывать персонализированный контент (в зависимости от выбранных вами настроек).Показывать персонализированную рекламу (в зависимости от выбранных вами настроек).Если вы выберете "Отклонить все", мы не будем использовать файлы cookie для этих дополнительных целей.Неперсонализированные материалы и реклама подбираются с учетом таких факторов, как контент, который вы просматриваете в текущий момент, и ваше местоположение (для показа рекламы используются данные только о приблизительном местоположении). // Дальше — youtube.com
У японцев ТТ-движок лопнул.
Внутри ролика с 2:20, полминуты.
Полминуты говорун несёт бред.
(https://youtu.be/7_iOAa7v3jU?t=140)
Внутри ролика с 2:20, полминуты.
Полминуты говорун несёт бред.
(https://youtu.be/7_iOAa7v3jU?t=140)
Xan> У японцев ТТ-движок лопнул.
Подробнее:

Подробнее:
О перспективах частной космонавтики [Alexandrc#14.07.23 09:59]
Ранее в теме вспоминали японцев Они таки... бахнули вторую ступень при прожиге 【速報】 イプシロンSロケット第2段モータ地上燃焼試験中に爆発か? 2023.7.14 9:00~ イプシロンSロケット第2段モータ地上燃焼試験 / Epsilon S rocket 2nd stage motor firing test Японская ракета-носитель Epsilon S взорвалась во время испытаний двигателя В результате инцидента никто не пострадал // tass.ru // Новости околоземной космонавтики
- Xan [24.07.2023 18:16]: Предупреждение пользователю: ereeru#24.07.23 15:46
- Xan [25.07.2023 06:29]: Перенос сообщений в ...del
Уже в который раз вижу запуск ракеты с onboard video stabilizer and Vertical Orientation Control (VOC) system built into the nose.
В этом запуске (как я понял) была цель оттянуть запуск второй ступени. "Народ" поздравляет - 15,6 сек на высоте более 3км!
По поводу стабилизации (см "крылышки" в носовой части) Steven Gregorski отсылает на GitHub с ключевыми словами NoseCam.
В этом запуске (как я понял) была цель оттянуть запуск второй ступени. "Народ" поздравляет - 15,6 сек на высоте более 3км!
По поводу стабилизации (см "крылышки" в носовой части) Steven Gregorski отсылает на GitHub с ключевыми словами NoseCam.
Прикреплённые файлы:
apakhom> По поводу стабилизации (см "крылышки" в носовой части) Steven Gregorski отсылает на GitHub с ключевыми словами NoseCam.
Я ничего не понял. Можешь поподробней изложить принцип стабилизации с э-таким оперением?
Я ничего не понял. Можешь поподробней изложить принцип стабилизации с э-таким оперением?
Реклама Google — средство выживания форумов :)
apakhom>> По поводу стабилизации (см "крылышки" в носовой части) Steven Gregorski отсылает на GitHub с ключевыми словами NoseCam.
П.а.M.> Я ничего не понял. Можешь поподробней изложить принцип стабилизации с э-таким оперением?
Как я понял - тут две системы:
1. Стабилизация положения камеры (головная часть вращается "на оси ракеты", тем самым земля внизу "как бы неподвижна") - на видео хорошо этот процесс видно. Про это на GitHub-е есть все - и 3d печать, и ПО.
2. Стабилизация вертикального положения ракеты - тут как раз "крылышки" работают. Тут на GitHub-e написано, что эти материалы не выкладываю В общих чертах пишет про 3х осевые акселерометры и гироскоп. На видео видно показания "телеметрии" - удерживает отклонение не более 5* (кстати, запуск второй ступени на 9000' как раз был при отклонении в 5*)
Было два запуска. Максимальная высота 20000' (6км).
Отмечает, что "очень дорого и очень затратно по времени" - это про разработку.
П.а.M.> Я ничего не понял. Можешь поподробней изложить принцип стабилизации с э-таким оперением?
Как я понял - тут две системы:
1. Стабилизация положения камеры (головная часть вращается "на оси ракеты", тем самым земля внизу "как бы неподвижна") - на видео хорошо этот процесс видно. Про это на GitHub-е есть все - и 3d печать, и ПО.
2. Стабилизация вертикального положения ракеты - тут как раз "крылышки" работают. Тут на GitHub-e написано, что эти материалы не выкладываю
В общих чертах пишет про 3х осевые акселерометры и гироскоп. На видео видно показания "телеметрии" - удерживает отклонение не более 5* (кстати, запуск второй ступени на 9000' как раз был при отклонении в 5*) Было два запуска. Максимальная высота 20000' (6км).
Отмечает, что "очень дорого и очень затратно по времени" - это про разработку.
Copyright © Balancer 1997..2024
Создано 18.07.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 18.07.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
