 Tayfur
Tayfur
 инфо
инфо инструменты
инструменты
 pinko
pinko




 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/3d/3dnews/assets/external/illustrations/2010/10/13/600098/128x128-crop/mems-accelerometer-2-big.jpg)
Использование микроэлектромеханических (MEMS) акселерометров в ракетомоделях
Теги:

Tayfur
втянувшийся
avmich> По поводу определения ориентации ракеты с помощью акселерометров. Если взять в качестве модели ракеты прямой отрезок, и поставить два трёхосевых акселератора в концах отрезка, то, интегрируя ускорения, можно получить трёхмерные координаты, из которых вычислить ориентацию отрезка в пространстве. Понятно, что в теории. Вопрос - насколько можно этот подход реализовать на практике? Хватает ли точности акселерометров - и, может быть, жёсткости ракеты? Или гироскопы всё же гораздо проще?
Будет хуже. Без гироскопа придётся углы ориентации вычислять по движению акселерометров. А это уже будет давать ошибки из-за дискретности вычислений. И такие вычисления дадут нагрузку на основной микроконтроллер. С учётом того, что в теме обычно это Ардуино на наработках прошлого века(если не ошибаюсь), не есть хорошо.
Будет хуже. Без гироскопа придётся углы ориентации вычислять по движению акселерометров. А это уже будет давать ошибки из-за дискретности вычислений. И такие вычисления дадут нагрузку на основной микроконтроллер. С учётом того, что в теме обычно это Ардуино на наработках прошлого века(если не ошибаюсь), не есть хорошо.


Сообщение было перенесено из темы Обсуждение испытаний и пусков ракет.
(Запуски ракет и испытания [apakhom#17.10.20 22:13])
apakhom> Набирал данные по акселерометру на "игрушке" РП-18А
apakhom> Данные с регистратора MFR (pinko) на подъеме по высоте (барометр):
apakhom> Хотелось бы мнение сашамакса - можно ли что "выжать" из данных по ускорению и как они расходятся с барометром?
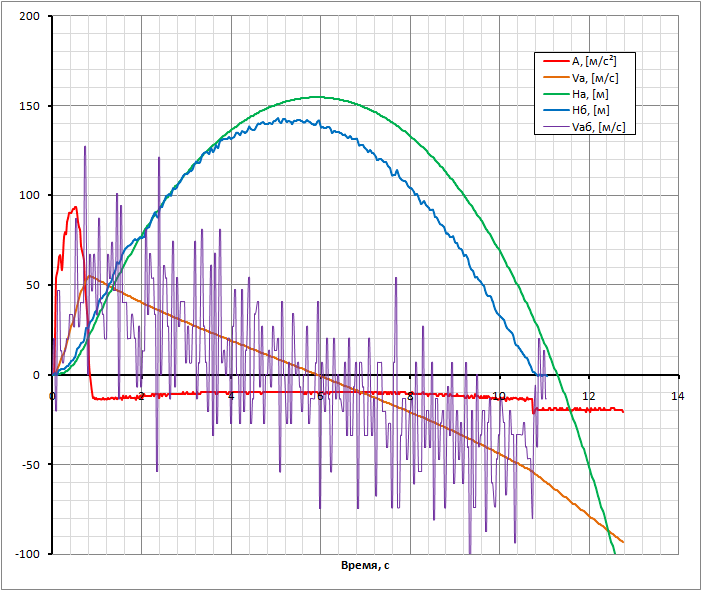
Моё мнение осталось неизменным точнее, оно подтвердилось - данный контроллер завышает ускорения на 10%, что ещё больше уже статистически доказывает, что ошибка в калибровке. По мимо всего прочего, есть подозрение, что контроллер перегружен или есть ошибки сбора информации, так как уход апогея во времени по акселерометру так же стабилен на одну и ту же величину. Возможно, прерывания мешают, возможно "игры" с буферами, возможно "игры" с фильтрами на "лету". Это так же не является научным подходом и такие данные не являются достаточно достоверными с научно измерительной точки зрения. Правильно писать только байты данных сразу с датчиков в память без фильтров, пересчётов и прочих преобразований, а также строго отслеживать тайминг измерений, т.е. важны именно "сырые" данные с устройств со строгой привязкой ко времени. Все пересчёты всегда можно выполнить потом уже на компьютере дома и самое важное здесь именно с научной точки зрения - это возможность независимой проверки правильности пересчётов любым другим человеком! С преобразованными данными так уже не сделать, а ошибиться может каждый...
точнее, оно подтвердилось - данный контроллер завышает ускорения на 10%, что ещё больше уже статистически доказывает, что ошибка в калибровке. По мимо всего прочего, есть подозрение, что контроллер перегружен или есть ошибки сбора информации, так как уход апогея во времени по акселерометру так же стабилен на одну и ту же величину. Возможно, прерывания мешают, возможно "игры" с буферами, возможно "игры" с фильтрами на "лету". Это так же не является научным подходом и такие данные не являются достаточно достоверными с научно измерительной точки зрения. Правильно писать только байты данных сразу с датчиков в память без фильтров, пересчётов и прочих преобразований, а также строго отслеживать тайминг измерений, т.е. важны именно "сырые" данные с устройств со строгой привязкой ко времени. Все пересчёты всегда можно выполнить потом уже на компьютере дома и самое важное здесь именно с научной точки зрения - это возможность независимой проверки правильности пересчётов любым другим человеком! С преобразованными данными так уже не сделать, а ошибиться может каждый...
И да, скорость по барометру без фильтра выглядит именно так см. рис. (фиолетовая кривая).
Сейчас ещё напишу про фильтры, которые pinko накладывает на рассчитанную скорость, про то, как они нихрена не повышают точность вычисления этой самой скорости и про, как это вас всех вводит в заблуждение... (...там картинка будет сложная... для множества фильтров, а не для одной единственной выборки из них...)
apakhom> Набирал данные по акселерометру на "игрушке" РП-18А
apakhom> Данные с регистратора MFR (pinko) на подъеме по высоте (барометр):
apakhom> Хотелось бы мнение сашамакса - можно ли что "выжать" из данных по ускорению и как они расходятся с барометром?
Моё мнение осталось неизменным
 точнее, оно подтвердилось - данный контроллер завышает ускорения на 10%, что ещё больше уже статистически доказывает, что ошибка в калибровке. По мимо всего прочего, есть подозрение, что контроллер перегружен или есть ошибки сбора информации, так как уход апогея во времени по акселерометру так же стабилен на одну и ту же величину. Возможно, прерывания мешают, возможно "игры" с буферами, возможно "игры" с фильтрами на "лету". Это так же не является научным подходом и такие данные не являются достаточно достоверными с научно измерительной точки зрения. Правильно писать только байты данных сразу с датчиков в память без фильтров, пересчётов и прочих преобразований, а также строго отслеживать тайминг измерений, т.е. важны именно "сырые" данные с устройств со строгой привязкой ко времени. Все пересчёты всегда можно выполнить потом уже на компьютере дома и самое важное здесь именно с научной точки зрения - это возможность независимой проверки правильности пересчётов любым другим человеком! С преобразованными данными так уже не сделать, а ошибиться может каждый...
точнее, оно подтвердилось - данный контроллер завышает ускорения на 10%, что ещё больше уже статистически доказывает, что ошибка в калибровке. По мимо всего прочего, есть подозрение, что контроллер перегружен или есть ошибки сбора информации, так как уход апогея во времени по акселерометру так же стабилен на одну и ту же величину. Возможно, прерывания мешают, возможно "игры" с буферами, возможно "игры" с фильтрами на "лету". Это так же не является научным подходом и такие данные не являются достаточно достоверными с научно измерительной точки зрения. Правильно писать только байты данных сразу с датчиков в память без фильтров, пересчётов и прочих преобразований, а также строго отслеживать тайминг измерений, т.е. важны именно "сырые" данные с устройств со строгой привязкой ко времени. Все пересчёты всегда можно выполнить потом уже на компьютере дома и самое важное здесь именно с научной точки зрения - это возможность независимой проверки правильности пересчётов любым другим человеком! С преобразованными данными так уже не сделать, а ошибиться может каждый...И да, скорость по барометру без фильтра выглядит именно так см. рис. (фиолетовая кривая).
Сейчас ещё напишу про фильтры, которые pinko накладывает на рассчитанную скорость, про то, как они нихрена не повышают точность вычисления этой самой скорости и про, как это вас всех вводит в заблуждение... (...там картинка будет сложная... для множества фильтров, а не для одной единственной выборки из них...)
Прикреплённые файлы:


Сообщение было перенесено из темы Обсуждение испытаний и пусков ракет.
Данные от контроллера - это необработанные данные без фильтрации. Не имеет значения, рассчитываются ли биты или ускорения с использованием линейной функции.
Фильтрация осуществляется в программном обеспечении во время визуализации для простоты использования.
Кто хочет больше или разную информацию или хочет полететь и приземлиться на Луну, может пересчитать все в Excel или другом программном обеспечении.
Также любой желающий может сделать свое собственное устройство и исправить все "ошибки и проблемы", которые он находит у меня, и представить идеальную работу ... как всегда.")
Фильтрация осуществляется в программном обеспечении во время визуализации для простоты использования.
Кто хочет больше или разную информацию или хочет полететь и приземлиться на Луну, может пересчитать все в Excel или другом программном обеспечении.
Также любой желающий может сделать свое собственное устройство и исправить все "ошибки и проблемы", которые он находит у меня, и представить идеальную работу ... как всегда.
")

SashaMaks> И да, скорость по барометру без фильтра выглядит именно так см. рис. (фиолетовая кривая).
Вот некоторое множество фильтров из полиномов разных порядков и немного разных усреднений.
Самый важный вопрос для точности - это достоверность, кам и какому из них можно достоверно верить? Это всё просто математическая "спекуляция" даже без расчёта доверительных интервалов. Но тут и на глаз прекрасно видно, что точность у такого метода определения скорости будет очень плохой. В данном случае максимум получается что-то где-то (70±20)м.
Вот некоторое множество фильтров из полиномов разных порядков и немного разных усреднений.
Самый важный вопрос для точности - это достоверность, кам и какому из них можно достоверно верить? Это всё просто математическая "спекуляция" даже без расчёта доверительных интервалов. Но тут и на глаз прекрасно видно, что точность у такого метода определения скорости будет очень плохой. В данном случае максимум получается что-то где-то (70±20)м.
Прикреплённые файлы:
Это сообщение редактировалось 19.10.2020 в 11:44
pinko> Данные от контроллера - это необработанные данные без фильтрации. Не имеет значения, рассчитываются ли биты или ускорения с использованием линейной функции.
Имеет, так как уже применена линейная функция.
pinko> Кто хочет ... разную информацию ..., может пересчитать все в Excel или другом программном обеспечении.
Каким образом я могу получить исходные байты с акселерометра без применённой линейной функции???
Имеет, так как уже применена линейная функция.
pinko> Кто хочет ... разную информацию ..., может пересчитать все в Excel или другом программном обеспечении.
Каким образом я могу получить исходные байты с акселерометра без применённой линейной функции???
pinko>> Данные от контроллера - это необработанные данные без фильтрации. Не имеет значения, рассчитываются ли биты или ускорения с использованием линейной функции.
SashaMaks> Имеет, так как уже применена линейная функция.
pinko>> Кто хочет ... разную информацию ..., может пересчитать все в Excel или другом программном обеспечении.
SashaMaks> Каким образом я могу получить исходные байты с акселерометра без применённой линейной функции???
Вся информация предоставляется в исходном файле.
y = a*x + b
y - ускорение в g
a - g на младший байт
b - нулевой сдвиг
итак, если мы знаем y, a и b - можем ли мы найти x?
А я думал, ты университет закончил
Думаю, на этом наша дискуссия закончилась - у меня нет ничего больше сказать!
SashaMaks> Имеет, так как уже применена линейная функция.
pinko>> Кто хочет ... разную информацию ..., может пересчитать все в Excel или другом программном обеспечении.
SashaMaks> Каким образом я могу получить исходные байты с акселерометра без применённой линейной функции???
Вся информация предоставляется в исходном файле.
y = a*x + b
y - ускорение в g
a - g на младший байт
b - нулевой сдвиг
итак, если мы знаем y, a и b - можем ли мы найти x?
А я думал, ты университет закончил

Думаю, на этом наша дискуссия закончилась - у меня нет ничего больше сказать!
pinko> a - g на младший байт
Что такое "g на младший байт"?
Что такое "g на младший байт"?
pinko>> a - g на младший байт
SashaMaks> Что такое "g на младший байт"?
*g на младший бит
Это моя ошибка в наборе - думаю, ты очень хорошо понял о чем там.
SashaMaks> Что такое "g на младший байт"?
*g на младший бит
Это моя ошибка в наборе - думаю, ты очень хорошо понял о чем там.
SashaMaks>> Что такое "g на младший байт"?
pinko> *g на младший бит
pinko> Это моя ошибка в наборе - думаю, ты очень хорошо понял о чем там.
Нет, я сейчас не только ничего не понял, я сейчас вообще ничего не понял.
1. Что такое "на"? Разделить на? Или умножить на? Или ещё что-то?
2. Где взять младший байт/бит?
pinko> *g на младший бит
pinko> Это моя ошибка в наборе - думаю, ты очень хорошо понял о чем там.
Нет, я сейчас не только ничего не понял, я сейчас вообще ничего не понял.
1. Что такое "на"? Разделить на? Или умножить на? Или ещё что-то?
2. Где взять младший байт/бит?
SashaMaks>>> Что такое "g на младший байт"?
pinko>> *g на младший бит
pinko>> Это моя ошибка в наборе - думаю, ты очень хорошо понял о чем там.
SashaMaks> Нет, я сейчас не только ничего не понял, я сейчас вообще ничего не понял.
SashaMaks> 1. Что такое "на"? Разделить на? Или умножить на? Или ещё что-то?
SashaMaks> 2. Где взять младший байт/бит?
Я думал закончить это обсуждение, но вижу необходимость уточнить работу контроллера и устройства, чтобы могли дать более технически обоснованное, а не поспешное личное, мнение. (без обид здесь)

а) В заголовке файла указаны калибровочные коэффициенты для каждой оси при 4-кратном повороте на 90 градусов. Эти цифры представляют необработанные выходные данные датчика приведен как дополнительный код.
пример:
CALIBRATION_X_0 = 21 ---> 1g
(при калибровке на 1 g - это должно быть максимальное значение, отображаемое во время калибровки)
CALIBRATION_X_90 = 2 ---> 0g
CALIBRATION_X_180 = -16 ---> -1g
(при калибровке на -1 g - это должно быть минимальное значение, отображаемое во время калибровки)
CALIBRATION_X_270 = 2 ---> 0g
b) также приведены расчетные коэффициенты для линейной функции вида y = bx + a (здесь - и + зависят от ориентации датчика при пайке на печатной платы)
пример:
COEF_A_X = 2.000 ---> нулевой сдвиг в датчике
COEF_B_X = -18.500 ---> а точнее сколько бит на g
В техническом описании это соответствует следующим значениям. В моем случае ось x перевернута, поэтому -18,5

Контроллер записывает необработанные данные в память и выдает вычисленное ускорение на основе этих коэффициентов, используя линейную функцию y = bx + a. Таким образом, мы можем легко вернуть необработанные битовые данные датчика - что не имеет никакого значения.
Итак, откуда могла взяться ошибка в моем случае:
1. Нелинейность датчика - калибрую на 2 г и экстраполирую дальше. Но сам датчик имеет нелинейность во всем диапазоне 500g, равную 0,25% (NonlinearityPercentage of full scale ±0.25 %), но в большинстве случаев мы работаем в диапазоне 50g (±25g) так что мы можем ее игнорировать.
2. Изменение чувствительности из-за температуры (Sensitivity Change Due to Temperature ±0.02%/°C) - Я думаю, что нет смысла обсуждать это - мы можем проигнорировать эти значения.
3. Температурный дрейф 0g (0 g Offset vs. Temperature ±10mg/°C) - Это важно, поскольку изменение температуры на 10 градусов между калибровкой и запуском может дать изменение 0-g на 0,1g, что является значительным.
4. Неточность ручной калибровки и, соответственно, коэффициентов - эта погрешность является случайной на каждом сеансе калибровки и может быть передана и умножена на наш практический диапазон ускорения.
5. Чувствительность поперечной оси - (Cross-Axis Sensitivity ±2.5%) - имеет большое значение и не может быть проигнорировано.
Про 1 и 2 - Как я уже упоминал (в соответствии с техническое описание) линейность в датчике и температурная линейность превосходны, и их можно игнорировать.
Про 3 - Температурный дрейф 0g - это можно легко проверить, поскольку устройство записывает данные датчиков, пока ракета ожидает. И мы можем легко проверить, какое среднее g на оси X, пока ракета ждет (положение 1g). Из первых примерно 4000 записанных точек мы получаем в среднем 0,993g где это должно быть 1.000 - это не совсем сдвиг в 0-g.
Про 4 - Может быть экстраполировано, как в пункте 3
Про 5 - Требуется сложное тестирование и его нельзя дать так просто, но он может внести значительный вклад неточности во время полета.
Для точной оценки ошибки ускорения - все эти зависимости должны быть проверены и известны что требует серьезного тестирования и сложной методологии - eто далеко за рамками любительских устройств и ракет ...
ошибка в этот момент имеет как систематическую, так и случайную составляющие и может показывать нормальные показания в диапазоне от -1 до +1 g и быть неправильной в расширенном диапазоне, а может и не быть.
Поетому здесь утверждения о том, что ошибка составляет 10% в положительном или отрицательном направлении, является чисто личным мнением без аргументов и является чистым предположением!
Думаю, мой ответ исчерпал нашу дискуссию по этому поводу.
pinko>> *g на младший бит
pinko>> Это моя ошибка в наборе - думаю, ты очень хорошо понял о чем там.
SashaMaks> Нет, я сейчас не только ничего не понял, я сейчас вообще ничего не понял.
SashaMaks> 1. Что такое "на"? Разделить на? Или умножить на? Или ещё что-то?
SashaMaks> 2. Где взять младший байт/бит?
Я думал закончить это обсуждение, но вижу необходимость уточнить работу контроллера и устройства, чтобы могли дать более технически обоснованное, а не поспешное личное, мнение. (без обид здесь)

а) В заголовке файла указаны калибровочные коэффициенты для каждой оси при 4-кратном повороте на 90 градусов. Эти цифры представляют необработанные выходные данные датчика приведен как дополнительный код.
пример:
CALIBRATION_X_0 = 21 ---> 1g
(при калибровке на 1 g - это должно быть максимальное значение, отображаемое во время калибровки)
CALIBRATION_X_90 = 2 ---> 0g
CALIBRATION_X_180 = -16 ---> -1g
(при калибровке на -1 g - это должно быть минимальное значение, отображаемое во время калибровки)
CALIBRATION_X_270 = 2 ---> 0g
b) также приведены расчетные коэффициенты для линейной функции вида y = bx + a (здесь - и + зависят от ориентации датчика при пайке на печатной платы)
пример:
COEF_A_X = 2.000 ---> нулевой сдвиг в датчике
COEF_B_X = -18.500 ---> а точнее сколько бит на g
В техническом описании это соответствует следующим значениям. В моем случае ось x перевернута, поэтому -18,5

Контроллер записывает необработанные данные в память и выдает вычисленное ускорение на основе этих коэффициентов, используя линейную функцию y = bx + a. Таким образом, мы можем легко вернуть необработанные битовые данные датчика - что не имеет никакого значения.
Итак, откуда могла взяться ошибка в моем случае:
1. Нелинейность датчика - калибрую на 2 г и экстраполирую дальше. Но сам датчик имеет нелинейность во всем диапазоне 500g, равную 0,25% (NonlinearityPercentage of full scale ±0.25 %), но в большинстве случаев мы работаем в диапазоне 50g (±25g) так что мы можем ее игнорировать.
2. Изменение чувствительности из-за температуры (Sensitivity Change Due to Temperature ±0.02%/°C) - Я думаю, что нет смысла обсуждать это - мы можем проигнорировать эти значения.
3. Температурный дрейф 0g (0 g Offset vs. Temperature ±10mg/°C) - Это важно, поскольку изменение температуры на 10 градусов между калибровкой и запуском может дать изменение 0-g на 0,1g, что является значительным.
4. Неточность ручной калибровки и, соответственно, коэффициентов - эта погрешность является случайной на каждом сеансе калибровки и может быть передана и умножена на наш практический диапазон ускорения.
5. Чувствительность поперечной оси - (Cross-Axis Sensitivity ±2.5%) - имеет большое значение и не может быть проигнорировано.
Про 1 и 2 - Как я уже упоминал (в соответствии с техническое описание) линейность в датчике и температурная линейность превосходны, и их можно игнорировать.
Про 3 - Температурный дрейф 0g - это можно легко проверить, поскольку устройство записывает данные датчиков, пока ракета ожидает. И мы можем легко проверить, какое среднее g на оси X, пока ракета ждет (положение 1g). Из первых примерно 4000 записанных точек мы получаем в среднем 0,993g где это должно быть 1.000 - это не совсем сдвиг в 0-g.
Про 4 - Может быть экстраполировано, как в пункте 3
Про 5 - Требуется сложное тестирование и его нельзя дать так просто, но он может внести значительный вклад неточности во время полета.
Для точной оценки ошибки ускорения - все эти зависимости должны быть проверены и известны что требует серьезного тестирования и сложной методологии - eто далеко за рамками любительских устройств и ракет ...
ошибка в этот момент имеет как систематическую, так и случайную составляющие и может показывать нормальные показания в диапазоне от -1 до +1 g и быть неправильной в расширенном диапазоне, а может и не быть.
Поетому здесь утверждения о том, что ошибка составляет 10% в положительном или отрицательном направлении, является чисто личным мнением без аргументов и является чистым предположением!
Думаю, мой ответ исчерпал нашу дискуссию по этому поводу.
pinko> a - g на младший байт
pinko> b - нулевой сдвиг
pinko> пример:
pinko> COEF_AX = 2.000 ---> нулевой сдвиг в датчике
pinko> COEFB_X = -18.500 ---> а точнее сколько бит на g
Я запутался окончательно.
Можно конкретный пример в цифрах для отдельного значения?
Для оси X есть такая цифра:
10.2[G], как её перевести в байты?
pinko> b - нулевой сдвиг
pinko> пример:
pinko> COEF_AX = 2.000 ---> нулевой сдвиг в датчике
pinko> COEFB_X = -18.500 ---> а точнее сколько бит на g
Я запутался окончательно.
Можно конкретный пример в цифрах для отдельного значения?
Для оси X есть такая цифра:
10.2[G], как её перевести в байты?
pinko>> a - g на младший байт
pinko>> b - нулевой сдвиг
pinko>> пример:
pinko>> COEF_AX = 2.000 ---> нулевой сдвиг в датчике
pinko>> COEFB_X = -18.500 ---> а точнее сколько бит на g
SashaMaks> Я запутался окончательно.
SashaMaks> Можно конкретный пример в цифрах для отдельного значения?
SashaMaks> Для оси X есть такая цифра:
SashaMaks> 10.2[G], как её перевести в байты?
У нам есть
- (-18.5) --> LSB/g (чувствительность)
- (2) --> показания в битах с датчика при 0g (0g сдвиг)
- x --> показания в битах с датчика
Нормально должно быть:
-10.2 = [(1/-18.5)*x] - (2/-18.5)
но поскольку у меня датчик перевернут:
10.2 = (2/-18.5) - [(1/-18.5)*x]
x = 190.7
Eто не круглое число из-за математики с плавающей запятой - датчик работает быстрее, чем время между записями и контроллер получает и усредняет 3 показания для каждой записи.
pinko>> b - нулевой сдвиг
pinko>> пример:
pinko>> COEF_AX = 2.000 ---> нулевой сдвиг в датчике
pinko>> COEFB_X = -18.500 ---> а точнее сколько бит на g
SashaMaks> Я запутался окончательно.
SashaMaks> Можно конкретный пример в цифрах для отдельного значения?
SashaMaks> Для оси X есть такая цифра:
SashaMaks> 10.2[G], как её перевести в байты?
У нам есть
- (-18.5) --> LSB/g (чувствительность)
- (2) --> показания в битах с датчика при 0g (0g сдвиг)
- x --> показания в битах с датчика
Нормально должно быть:
-10.2 = [(1/-18.5)*x] - (2/-18.5)
но поскольку у меня датчик перевернут:
10.2 = (2/-18.5) - [(1/-18.5)*x]
x = 190.7
Eто не круглое число из-за математики с плавающей запятой - датчик работает быстрее, чем время между записями и контроллер получает и усредняет 3 показания для каждой записи.
pinko> но поскольку у меня датчик перевернут:
pinko> 10.2 = (2/-18.5) - [(1/-18.5)*x]
pinko> x = 190.7
Или тоже самое, что: 10,2 * 18,5 + 2 = 190,7.
Для формулы: Y = A*X + B подобная запись при:
'COEF_A_X
'2.000
'COEF_B_X
'-18.500
из файла даёт просто неадеватный результат, поэтому и реакция моя была соответствующей:
SashaMaks> Вообще такое и калибровкой-то не назовёшь...
SashaMaks> Лучше бы он писалголые попугаи байты везде и с барометра тоже...
В тоже время даташит на данный акселерометр предлагает использовать
A = 20,5 и B = 0 в среднем по их датчикам, т.е. если нам лень калибровать, то мы можем просто взять эти значения, и вот что получается уже во второй раз (см. рис.).
На графике фиолетовая кривая высоты построена от A = 20,5 и B = 0.
Или её значения отличаются от указанной в файле калибровки в:
SashaMaks> Итого показания уже могут быть завышены в 41/37 = 1,108 раз.
в меньшую сторону, где:
37 - число всё-таки байт на 2G или те же 37 / 2 = 18,5G на диапазоне 1G, а
41 - 20,5 (среднее из даташита) * 2.
Т.е. калибровка по умолчанию для данного акселерометра уже второй раз выходит точнее.
Резльтат по высоте с акселерометра совпадает с барометром просто тютелька в тютельку при A = 20,5 и B = 0.
П.С. Причём даже А = 20,48 или 4096/200, где 4096 = 212...
П.П.С. Ошибка ±10% при измерении 1G под разными углами взялась от случайной погрешности от тех же шумов и всех прочих погрешностей в этом измерении, где данная величина, скорее всего, была замерена с точностью (1+-0,1)G или уровень случайного отклонения был где-то ±0,1G или более.
pinko> 10.2 = (2/-18.5) - [(1/-18.5)*x]
pinko> x = 190.7
Или тоже самое, что: 10,2 * 18,5 + 2 = 190,7.
Для формулы: Y = A*X + B подобная запись при:
'COEF_A_X
'2.000
'COEF_B_X
'-18.500
из файла даёт просто неадеватный результат, поэтому и реакция моя была соответствующей:
SashaMaks> Вообще такое и калибровкой-то не назовёшь...
SashaMaks> Лучше бы он писал
В тоже время даташит на данный акселерометр предлагает использовать
A = 20,5 и B = 0 в среднем по их датчикам, т.е. если нам лень калибровать, то мы можем просто взять эти значения, и вот что получается уже во второй раз (см. рис.).
На графике фиолетовая кривая высоты построена от A = 20,5 и B = 0.
Или её значения отличаются от указанной в файле калибровки в:
SashaMaks> Итого показания уже могут быть завышены в 41/37 = 1,108 раз.
в меньшую сторону, где:
37 - число всё-таки байт на 2G или те же 37 / 2 = 18,5G на диапазоне 1G, а
41 - 20,5 (среднее из даташита) * 2.
Т.е. калибровка по умолчанию для данного акселерометра уже второй раз выходит точнее.
Резльтат по высоте с акселерометра совпадает с барометром просто тютелька в тютельку при A = 20,5 и B = 0.
П.С. Причём даже А = 20,48 или 4096/200, где 4096 = 212...
П.П.С. Ошибка ±10% при измерении 1G под разными углами взялась от случайной погрешности от тех же шумов и всех прочих погрешностей в этом измерении, где данная величина, скорее всего, была замерена с точностью (1+-0,1)G или уровень случайного отклонения был где-то ±0,1G или более.
Прикреплённые файлы:

SashaMaks> Т.е. калибровка по умолчанию для данного акселерометра уже второй раз выходит точнее.
SashaMaks> Резльтат по высоте с акселерометра совпадает с барометром просто тютелька в тютельку при A = 20,5 и B = 0.
Очень интересно! А положи сам xls - попробую разобраться в вашей дискуссии") и проверить(пересчитать) остальные запуски (MFR у меня слетал с десяток раз от 100м до 2км).
и проверить(пересчитать) остальные запуски (MFR у меня слетал с десяток раз от 100м до 2км).
Но, остается неясным - как относиться к временнОму смещению апогея?
SashaMaks> Резльтат по высоте с акселерометра совпадает с барометром просто тютелька в тютельку при A = 20,5 и B = 0.
Очень интересно! А положи сам xls - попробую разобраться в вашей дискуссии
") и проверить(пересчитать) остальные запуски (MFR у меня слетал с десяток раз от 100м до 2км).
и проверить(пересчитать) остальные запуски (MFR у меня слетал с десяток раз от 100м до 2км).Но, остается неясным - как относиться к временнОму смещению апогея?

apakhom> А положи сам xls - попробую разобраться в вашей дискуссии и проверить(пересчитать) остальные запуски (MFR у меня слетал с десяток раз от 100м до 2км).
Прикрепил...
apakhom> Но, остается неясным - как относиться к временнОму смещению апогея?
Боюсь даже затрагивать эту тему)))
Но, ты можешь отследить задержку по времени в запусках статистически, если она будет воспроизводиться от запуска к запуску и оставаться при этом неизменной, то дело точно не в принципе измерения, а в способе его реализации, так как ракеты не могут летать всё время на одно и то же уклонение. А при строго вертикальном полёте или даже близком к нему, никаких задержет быть вообще не должно.
и проверить(пересчитать) остальные запуски (MFR у меня слетал с десяток раз от 100м до 2км).Прикрепил...
apakhom> Но, остается неясным - как относиться к временнОму смещению апогея?
Боюсь даже затрагивать эту тему)))
Но, ты можешь отследить задержку по времени в запусках статистически, если она будет воспроизводиться от запуска к запуску и оставаться при этом неизменной, то дело точно не в принципе измерения, а в способе его реализации, так как ракеты не могут летать всё время на одно и то же уклонение. А при строго вертикальном полёте или даже близком к нему, никаких задержет быть вообще не должно.
Прикреплённые файлы:
rp18-4x-mfrS.xlsx (скачать)
[175 кБ]
apakhom> Но, остается неясным - как относиться к временнОму смещению апогея?
Была тут ещё вот такая ссылка:
Была тут ещё вот такая ссылка:
Aerocon Systems G-Wiz Flight Computers
Go Back to Electronics Index We have opened a new webstore Order Online! Feedback is Always Welcome The Gwiz LCX is a low cost, feature packed computer comprised of an accelerometer, high performance RISC processor, and 2 high current pyro driver channels plus a third pyro driver channel and barometric sensor for 2 stage deployment. The Gwiz HCX is the simplest full-on flight computer going today! The Gwiz HCX takes the fully featured G-Wiz LCX to a much higher level of sophistication recording features to allow you to record data during the flight, and download it to your computer afterwards. // Дальше — www.aeroconsystems.com
apakhom>> Но, остается неясным - как относиться к временнОму смещению апогея?
SashaMaks> Была тут ещё вот такая ссылка:
Если про контроллер, то там что-то либо довольно старое, либо "очень надежно-крепкое". Я только датчик давления распознал (вроде бы). А какой акселерометр - не видно
Кстати, на ВИШ совсем юные участники (которые контроллер сами затрудняются разработать) пользовались вот этим отечественным творением. И - ничего, работало! даже с экзотическими ССР (типа моторчик с резьбовой шпилькой, вывинчивающий "голову" из ракеты).
SashaMaks> Была тут ещё вот такая ссылка:
Если про контроллер, то там что-то либо довольно старое, либо "очень надежно-крепкое". Я только датчик давления распознал (вроде бы). А какой акселерометр - не видно

Кстати, на ВИШ совсем юные участники (которые контроллер сами затрудняются разработать) пользовались вот этим отечественным творением. И - ничего, работало! даже с экзотическими ССР (типа моторчик с резьбовой шпилькой, вывинчивающий "голову" из ракеты).

apakhom> .... даже с экзотическими ССР (типа моторчик с резьбовой шпилькой, вывинчивающий "голову" из ракеты).
А почему с "экзотическим"? Вот он.
Если он тебе нравится, то дарю.
А почему с "экзотическим"? Вот он.
Если он тебе нравится, то дарю.
Прикреплённые файлы:
apakhom>> .... даже с экзотическими ССР (типа моторчик с резьбовой шпилькой, вывинчивающий "голову" из ракеты).
Mihail66> А почему с "экзотическим"? Вот он.
Они когда мне стали рассказывать как у них сделано - сразу это твое письмо с картинкой вспомнил
Но они раньше - у ребят первая защита еще в декабре-январе была.
Я так понял, что там ни резинок, ни пружин (пиротехника запрещена по условиям соревнований) нет. Просто голова на резьбе - докручивается по направляющей и ее потоком воздуха "сносит". Парашют под ней свободно лежит - видимо, надеются (так и вышло), что его тоже "вынесет".
Mihail66> А почему с "экзотическим"? Вот он.
Они когда мне стали рассказывать как у них сделано - сразу это твое письмо с картинкой вспомнил
Но они раньше
- у ребят первая защита еще в декабре-январе была.Я так понял, что там ни резинок, ни пружин (пиротехника запрещена по условиям соревнований) нет. Просто голова на резьбе - докручивается по направляющей и ее потоком воздуха "сносит". Парашют под ней свободно лежит - видимо, надеются (так и вышло), что его тоже "вынесет".
apakhom> ...Но они раньше - у ребят первая защита еще в декабре-январе была.
Молодцы! А что у них за моторчик?
apakhom> Я так понял, что там ни резинок, ни пружин (пиротехника запрещена по условиям соревнований) нет. Просто голова на резьбе - докручивается по направляющей и ее потоком воздуха "сносит". Парашют под ней свободно лежит - видимо, надеются (так и вышло), что его тоже "вынесет".
Вполне рабочая конструкция, я уже хотел ее использовать в борьбе со своей "бедой", но тут вдруг нечаянно придумал, как не ждать пока гайка по всей резьбе пройдет.
- у ребят первая защита еще в декабре-январе была.Молодцы! А что у них за моторчик?
apakhom> Я так понял, что там ни резинок, ни пружин (пиротехника запрещена по условиям соревнований) нет. Просто голова на резьбе - докручивается по направляющей и ее потоком воздуха "сносит". Парашют под ней свободно лежит - видимо, надеются (так и вышло), что его тоже "вынесет".
Вполне рабочая конструкция, я уже хотел ее использовать в борьбе со своей "бедой", но тут вдруг нечаянно придумал, как не ждать пока гайка по всей резьбе пройдет.
apakhom>> А положи сам xls - попробую разобраться в вашей дискуссии и
SashaMaks> Прикрепил...
"Поигрался" с седьмым РП21Г
Там высоты по барометру и акселерометру наиболее близки при А=21 (при А=20,5 - на 100 м выше).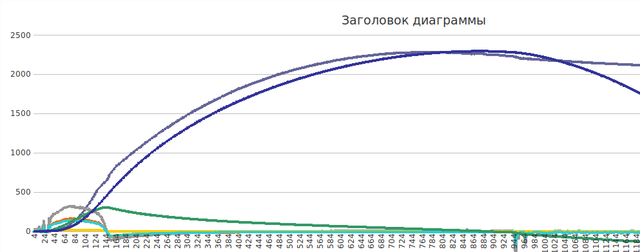
Но (что интересно) если "играть" коэффициентом В, то можно по времени кривую сдвинуть в "нужное место", причем величина его остается в допуске по документации.
Получается, что все правы!
Видимо, как pinko отмечал, температурные условия тоже сказываются - наверняка калибровка была дома (25-30*С), а запуск я делал при +10*С
Наверно надо все коэффициенты ставить "по среднему". Затем "пульнуть" MFR. Подобрать А и В и далее во всех запусках при той же температуре иметь "акселерометрические" данные близкие к "барометрическим"
Хотя парашют раскрывать уже можно сейчас - в "акселерометрическом" максимуме (без всякой калибровки).
И еще - получается, что пока работает двигатель, барометр дает весьма отдаленные от истины сведения о высоте (скорости). Его мембрана реагирует не только на давление, но и на ускорение (причем - непредсказуемо). Вот тут-то акселерометр нам может показать настоящее значение скорости.
и SashaMaks> Прикрепил...
"Поигрался" с седьмым РП21Г
Там высоты по барометру и акселерометру наиболее близки при А=21 (при А=20,5 - на 100 м выше).

Но (что интересно) если "играть" коэффициентом В, то можно по времени кривую сдвинуть в "нужное место", причем величина его остается в допуске по документации.
Получается, что все правы!
Видимо, как pinko отмечал, температурные условия тоже сказываются - наверняка калибровка была дома (25-30*С), а запуск я делал при +10*С
Наверно надо все коэффициенты ставить "по среднему". Затем "пульнуть" MFR. Подобрать А и В и далее во всех запусках при той же температуре иметь "акселерометрические" данные близкие к "барометрическим"
Хотя парашют раскрывать уже можно сейчас - в "акселерометрическом" максимуме (без всякой калибровки).
И еще - получается, что пока работает двигатель, барометр дает весьма отдаленные от истины сведения о высоте (скорости). Его мембрана реагирует не только на давление, но и на ускорение (причем - непредсказуемо). Вот тут-то акселерометр нам может показать настоящее значение скорости.
apakhom> ... Его мембрана реагирует не только на давление, но и на ускорение (причем - непредсказуемо). Вот тут-то акселерометр нам может показать настоящее значение скорости.
Так и есть. Я экспериментировал с BMP-280 на эту тему (ронял его об пол под различными углами). Он очень чувствителен к ударам и вибрациям, и на активном участке безбожно врет. Поэтому контролировать работу движка можно только по акселерометру.
Так и есть. Я экспериментировал с BMP-280 на эту тему (ронял его об пол под различными углами). Он очень чувствителен к ударам и вибрациям, и на активном участке безбожно врет. Поэтому контролировать работу движка можно только по акселерометру.
Tayfur
втянувшийся
apakhom> Я так понял, что там ни резинок, ни пружин (пиротехника запрещена по условиям соревнований) нет. Просто голова на резьбе - докручивается по направляющей и ее потоком воздуха "сносит". Парашют под ней свободно лежит - видимо, надеются (так и вышло), что его тоже "вынесет".
Ну вот же электромеханический выход парашюта. А вы всё как в Кербале "Готовим красивый бабах".
Ну вот же электромеханический выход парашюта. А вы всё как в Кербале "Готовим красивый бабах".
apakhom> Там высоты по барометру и акселерометру наиболее близки при А=21 (при А=20,5 - на 100 м выше).
"Играться" калибровочными коэффициентами нельзя, так как их получают в результате практических измерений, которые соотносят измеряемую величину с показаниями прибора с некоторой точностью.
Ты либо берёшь какие-то чужие данные (даташит или первоначальная калибровка) или сам делаешь калибровку, а просто так взять и поменять это будет просто расчётом ради расчёта.
apakhom> Но (что интересно) если "играть" коэффициентом В,
Коэффициенты А и В в том файле, что я скинул, находящиеся в ячейках С1 и С2 - это калибровочные коэффициенты твоего устройства, они с ним теперь навсегда. Их нельзя взять и просто так поменять, и они в данном расчёте нужны только для того, чтобы откатить применённую калибровку и применить калибровку из даташита.
apakhom> то можно по времени кривую сдвинуть в "нужное место", причем величина его остается в допуске по документации.
Коэффициент А отвечает за масштаб данных по оси Y, а В за их смещение по оси Y. Т.е. изменяя В, ты просто фиктивно изменяешь реальные данные, скажем, для отдельного измерения в 10G на 9,5G просто отсекая 0,5G. Не ну, считать можно что угодно и как угодно, но должна быть связь с реальностью и просто так 0,5G в реальности никуда не отсекаются.
apakhom> Получается, что все правы!
Увы, нет. Калибровка по средним значениям из даташита очевидно точнее.
Цифра 20,5 - это то, что старается сделать производитель в каждом своём чипе, а допуск дан для того, что отклонения случаются и чтобы потом не отвечать перед теми, кто решит использовать их устройство с более высокой точностью, а оно почему-то в 1 из 1000 шт. эту точность не воспроизвело...
apakhom> Видимо, как pinko отмечал, температурные условия тоже сказываются - наверняка калибровка была дома (25-30*С), а запуск я делал при +10*С
Такая разница температур влияет очень незначительно - порядка 1%.
И влияние качественно иное. При понижении температуры, УЭ становится более жестким, а его перемещения уменьшаются, следовательно и изменения напряжения на одну и ту же нагрузку уменьшаются, а не увеличиваются.
Поэтому для своих стендовых испытаний зимой, я ещё обычно стараюсь на морозе калибровать стенд, иначе данные будут занижены, а не завышены.
1% УИ - мелочь, но приятная
apakhom> Наверно надо все коэффициенты ставить "по среднему". Затем "пульнуть" MFR. Подобрать А и В и далее во всех запусках при той же температуре иметь "акселерометрические" данные близкие к "барометрическим"
У барометра есть свои полётные погрешности и весьма не маленькие. Калибровать акселерометр надо в центрифуге.
apakhom> И еще - получается, что пока работает двигатель, барометр дает весьма отдаленные от истины сведения о высоте (скорости). Его мембрана реагирует не только на давление, но и на ускорение (причем - непредсказуемо). Вот тут-то акселерометр нам может показать настоящее значение скорости.
Поэтому ещё во времена MPX4115A здесь рекомендовали барометры располагать вертикально мембраной к нагрузке в ракете. Как расположена мембрана у BMP280 - это надо проверять. Ну а завышения его показаний от скорости обдува вообще уже статистику набирают и при чём у всех. Могут доходить до 1,5-2 раз на дозвуке, а на трансзвуке вообще что-то непонятно твориться в его показаниях...
"Играться" калибровочными коэффициентами нельзя, так как их получают в результате практических измерений, которые соотносят измеряемую величину с показаниями прибора с некоторой точностью.
Ты либо берёшь какие-то чужие данные (даташит или первоначальная калибровка) или сам делаешь калибровку, а просто так взять и поменять это будет просто расчётом ради расчёта.
apakhom> Но (что интересно) если "играть" коэффициентом В,
Коэффициенты А и В в том файле, что я скинул, находящиеся в ячейках С1 и С2 - это калибровочные коэффициенты твоего устройства, они с ним теперь навсегда. Их нельзя взять и просто так поменять, и они в данном расчёте нужны только для того, чтобы откатить применённую калибровку и применить калибровку из даташита.
apakhom> то можно по времени кривую сдвинуть в "нужное место", причем величина его остается в допуске по документации.
Коэффициент А отвечает за масштаб данных по оси Y, а В за их смещение по оси Y. Т.е. изменяя В, ты просто фиктивно изменяешь реальные данные, скажем, для отдельного измерения в 10G на 9,5G просто отсекая 0,5G. Не ну, считать можно что угодно и как угодно, но должна быть связь с реальностью и просто так 0,5G в реальности никуда не отсекаются.
apakhom> Получается, что все правы!
Увы, нет. Калибровка по средним значениям из даташита очевидно точнее.
Цифра 20,5 - это то, что старается сделать производитель в каждом своём чипе, а допуск дан для того, что отклонения случаются и чтобы потом не отвечать перед теми, кто решит использовать их устройство с более высокой точностью, а оно почему-то в 1 из 1000 шт. эту точность не воспроизвело...
apakhom> Видимо, как pinko отмечал, температурные условия тоже сказываются - наверняка калибровка была дома (25-30*С), а запуск я делал при +10*С
Такая разница температур влияет очень незначительно - порядка 1%.
И влияние качественно иное. При понижении температуры, УЭ становится более жестким, а его перемещения уменьшаются, следовательно и изменения напряжения на одну и ту же нагрузку уменьшаются, а не увеличиваются.
Поэтому для своих стендовых испытаний зимой, я ещё обычно стараюсь на морозе калибровать стенд, иначе данные будут занижены, а не завышены.
1% УИ - мелочь, но приятная
apakhom> Наверно надо все коэффициенты ставить "по среднему". Затем "пульнуть" MFR. Подобрать А и В и далее во всех запусках при той же температуре иметь "акселерометрические" данные близкие к "барометрическим"
У барометра есть свои полётные погрешности и весьма не маленькие. Калибровать акселерометр надо в центрифуге.
apakhom> И еще - получается, что пока работает двигатель, барометр дает весьма отдаленные от истины сведения о высоте (скорости). Его мембрана реагирует не только на давление, но и на ускорение (причем - непредсказуемо). Вот тут-то акселерометр нам может показать настоящее значение скорости.
Поэтому ещё во времена MPX4115A здесь рекомендовали барометры располагать вертикально мембраной к нагрузке в ракете. Как расположена мембрана у BMP280 - это надо проверять. Ну а завышения его показаний от скорости обдува вообще уже статистику набирают и при чём у всех. Могут доходить до 1,5-2 раз на дозвуке, а на трансзвуке вообще что-то непонятно твориться в его показаниях...
Реклама Google — средство выживания форумов :)
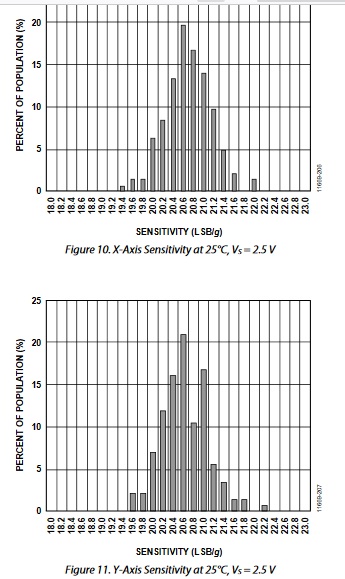
SashaMaks> Цифра 20,5 - это то, что старается сделать производитель в каждом своём чипе, а допуск дан для того, что отклонения случаются и чтобы потом не отвечать перед теми, кто решит использовать их устройство с более высокой точностью, а оно почему-то в 1 из 1000 шт. эту точность не воспроизвело...
Теоретически да, в действительности все немного иначе.
Как видно из тестов производителя - статистически только около 20% попадает в центральное значение по чувствительности и смещению.
Кроме того, при пайки какой-либо датчик, он имеет тенденцию гнуться от тепла и усадки припоя.
Так что это действительно случайная ошибка, и попытки разобраться без сложной методологической проверки всех факторов - это просто догадки.
Теоретически да, в действительности все немного иначе.
Как видно из тестов производителя - статистически только около 20% попадает в центральное значение по чувствительности и смещению.
Кроме того, при пайки какой-либо датчик, он имеет тенденцию гнуться от тепла и усадки припоя.
Так что это действительно случайная ошибка, и попытки разобраться без сложной методологической проверки всех факторов - это просто догадки.

Copyright © Balancer 1997..2023
Создано 26.06.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 26.06.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}