 Balancer
Balancer

 инфо
инфо инструменты
инструменты Zeus
Zeus



 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/w/w/www.planers32.ru/userfiles/image/helihopter/128x128-crop/ka137.jpg)
Сравнение соосной схемы и с рулевым винтом.
Теги:
Бяка>Не только. Ка-32 - дешёвый. Пожарный вертолёт - малоресурсная машина. Эксплуатируется не часто. Другие вертолёты, в той же весовой категории, гораздо более долгоживущие, поэтому и более дорогие. "Пожарнику" столько не налетать.[»]
Военные как раз тоже обычно смотрят в первую очередь на возможности. И только во вторую - на ресурс. Не считая, конечно, последних веяний в США, когда ишаков бомбить и с машин 30-летней давности можно...
И всё равно выглядит непонятно. Ведь классическую схему, в таком случае, тоже можно сделать малоресурсной и, потому, дешёвой. Тем более, что, если Ка-32 (кстати, его ещё и Испания, кажется, закупила) дешёвый из-за малого ресурса, то, выходит, его и проектировали малоресурсным. Как-то не вяжется...
Военные как раз тоже обычно смотрят в первую очередь на возможности. И только во вторую - на ресурс. Не считая, конечно, последних веяний в США, когда ишаков бомбить и с машин 30-летней давности можно...
И всё равно выглядит непонятно. Ведь классическую схему, в таком случае, тоже можно сделать малоресурсной и, потому, дешёвой. Тем более, что, если Ка-32 (кстати, его ещё и Испания, кажется, закупила) дешёвый из-за малого ресурса, то, выходит, его и проектировали малоресурсным. Как-то не вяжется...
Zeus>>а винт при даче педали увеличивает шаг лопастей, а не обороты.
Balancer>Ну, вертолёты не пилотировал")
Balancer>Но это вольный пересказ Элли Эстеля об особенностях пилотирования классической схемы.
Тут не обязательно пилотировать, достаточно знать, что рулевой винт приводится от того же двигателя, что и основной, без всякой коробки передач
Balancer>Кстати, всё равно непонятно, как ЭДСУ будет заранее знать, что ожидаются маневры?
Ну, кнопку придумать. Есть же у некоторых самолетов "маневренная конфигурация". Су-25, например.
Balancer>По отзывам того же Элли, скажем, пилотирование Ми-24 на режимах, отличных от прямолинейного полёта - это натуральный цирк...[»]
Разбаловали! Кстати, это он небось по сравнению с теми вертолетами, на которых привык летать?") Неужели на соосниках?
Неужели на соосниках?
Balancer>Ну, вертолёты не пилотировал
Balancer>Но это вольный пересказ Элли Эстеля об особенностях пилотирования классической схемы.
Тут не обязательно пилотировать, достаточно знать, что рулевой винт приводится от того же двигателя, что и основной, без всякой коробки передач
Balancer>Кстати, всё равно непонятно, как ЭДСУ будет заранее знать, что ожидаются маневры?
Ну, кнопку придумать. Есть же у некоторых самолетов "маневренная конфигурация". Су-25, например.
Balancer>По отзывам того же Элли, скажем, пилотирование Ми-24 на режимах, отличных от прямолинейного полёта - это натуральный цирк...[»]
Разбаловали! Кстати, это он небось по сравнению с теми вертолетами, на которых привык летать?
Неужели на соосниках?
Бяка> Высокие вибрации.
Тут лучше привести цифры. Например, уровень вибраций в Ка-32 [такой-то], а в Ми-8 - [такой-то].
На мой взгляд, Ка-32 довольно спокойная машина. История с применением Ка-26 для съемок велогонки московской олимпиады утверждает, что организаторы были в восторге от качества трансляции.
Любая фирма стремится снизить уровень вибраций. В частности камовцами, как один из способов, применяется маятниковые гасители колебаний нижнего винта (этого вполне достаточно).
Бяка> Значит низкий ресурс планера. И тут никакие технические ухищрения не помогут.
Стоит добавлять: при условии одинакового подхода к проектированию планера (корректнее: при прочих равных условиях).
Возможно, стоит заметить, что у схемы с рулевым винтом 2 источника вибраций: группа "несущий винт с двигателями" и рулевой винт.
Balancer> Но те же канадцы, скажем, у нас пожарные соосники закупают. Или это из-за более простого пилотирования и режима висения?
Бяка> Не только. Ка-32 - дешёвый. Пожарный вертолёт - малоресурсная машина. Эксплуатируется не часто. Другие вертолёты, в той же весовой категории, гораздо более долгоживущие, поэтому и более дорогие. "Пожарнику" столько не налетать.
В Канаде Ка-32ВС11 используются прежде всего на тралевке леса (логгинге). В гораздо меньшей степени они применяются при тушении пожаров и перевозке грузов. (Сайт Brazd'а как-то разжился видео из Канады. Если удасться скачать - можно посмотреть)
Эксплуатирующая сторона платит не за простой вертолета на земле, а за его работу в воздухе. Интенсивность эксплуатации доходила до того, что ресурс лопастей 3000 часов вылетывался за чуть больше, чем год.
Тут лучше привести цифры. Например, уровень вибраций в Ка-32 [такой-то], а в Ми-8 - [такой-то].
На мой взгляд, Ка-32 довольно спокойная машина. История с применением Ка-26 для съемок велогонки московской олимпиады утверждает, что организаторы были в восторге от качества трансляции.
Любая фирма стремится снизить уровень вибраций. В частности камовцами, как один из способов, применяется маятниковые гасители колебаний нижнего винта (этого вполне достаточно).
Бяка> Значит низкий ресурс планера. И тут никакие технические ухищрения не помогут.
Стоит добавлять: при условии одинакового подхода к проектированию планера (корректнее: при прочих равных условиях).
Возможно, стоит заметить, что у схемы с рулевым винтом 2 источника вибраций: группа "несущий винт с двигателями" и рулевой винт.
Balancer> Но те же канадцы, скажем, у нас пожарные соосники закупают. Или это из-за более простого пилотирования и режима висения?
Бяка> Не только. Ка-32 - дешёвый. Пожарный вертолёт - малоресурсная машина. Эксплуатируется не часто. Другие вертолёты, в той же весовой категории, гораздо более долгоживущие, поэтому и более дорогие. "Пожарнику" столько не налетать.
В Канаде Ка-32ВС11 используются прежде всего на тралевке леса (логгинге). В гораздо меньшей степени они применяются при тушении пожаров и перевозке грузов. (Сайт Brazd'а как-то разжился видео из Канады. Если удасться скачать - можно посмотреть)
Эксплуатирующая сторона платит не за простой вертолета на земле, а за его работу в воздухе. Интенсивность эксплуатации доходила до того, что ресурс лопастей 3000 часов вылетывался за чуть больше, чем год.
О схемах:
Часто сравнивают перехлёст на соосниках с перерубанием балки на «классике». Я не вертолётчик, но по моим ощущениям это совсем разные вещи. Перехлёст возможен лишь на предельных режимах. Неполная аналогия – если на автомобиле, на сухом асфальте, на большой скорости резко крутануть руль, то машину занесёт. На малой скорости такого не получится.
А вот если несколько раз дёрнуть рулём туда-обратно, причём с подходящей частотой и амплитудой, то раскачку и последующий занос можно обеспечить практически на любой скорости. Так и перерубание. Раскачать вертолёт и долбануть винтом по балке можно практически всегда. Это обычное, нормальное свойство вертолёта. Случаи перерубания – элементарные ошибки пилотирования.
Если что – сильно не пинайте.
Часто сравнивают перехлёст на соосниках с перерубанием балки на «классике». Я не вертолётчик, но по моим ощущениям это совсем разные вещи. Перехлёст возможен лишь на предельных режимах. Неполная аналогия – если на автомобиле, на сухом асфальте, на большой скорости резко крутануть руль, то машину занесёт. На малой скорости такого не получится.
А вот если несколько раз дёрнуть рулём туда-обратно, причём с подходящей частотой и амплитудой, то раскачку и последующий занос можно обеспечить практически на любой скорости. Так и перерубание. Раскачать вертолёт и долбануть винтом по балке можно практически всегда. Это обычное, нормальное свойство вертолёта. Случаи перерубания – элементарные ошибки пилотирования.
Если что – сильно не пинайте.
Zeus>Тут не обязательно пилотировать, достаточно знать, что рулевой винт приводится от того же двигателя, что и основной, без всякой коробки передач
Да, точно. Сбили меня тут с толку некоторые рассказы
Zeus>Ну, кнопку придумать. Есть же у некоторых самолетов "маневренная конфигурация". Су-25, например.
Ну так это, опять же, усложнения не от хорошей жизни. Всё же, согласись, что у соосников с этим проще
Zeus>Разбаловали! Кстати, это он небось по сравнению с теми вертолетами, на которых привык летать? Неужели на соосниках? [»]
Да нет, он как раз на Ми-24 в Афгане отлетал командиром звена. Ну, на Ми-8 сколько-то. И не в сравнении, а просто про них рассказывал.
Да, точно. Сбили меня тут с толку некоторые рассказы
Zeus>Ну, кнопку придумать. Есть же у некоторых самолетов "маневренная конфигурация". Су-25, например.
Ну так это, опять же, усложнения не от хорошей жизни. Всё же, согласись, что у соосников с этим проще
Zeus>Разбаловали! Кстати, это он небось по сравнению с теми вертолетами, на которых привык летать?
Неужели на соосниках? [»]Да нет, он как раз на Ми-24 в Афгане отлетал командиром звена. Ну, на Ми-8 сколько-то. И не в сравнении, а просто про них рассказывал.
ED>А вот если несколько раз дёрнуть рулём туда-обратно, причём с подходящей частотой и амплитудой, то раскачку и последующий занос можно обеспечить практически на любой скорости.
...
ED>Если что – сильно не пинайте.[»]
Всё так. Лебедь практически так и погиб на Ми-8: "При заходе на посадку в 74 км от поселка Ермаковское (район озера Ольское) вертолет зацепил тросы грозозащиты ЛЭП (она не была нанесена на полетную карту). Пилоты попытались избежать столкновения, резко набрав высоту, и это привело к разрушению лопастей несущего винта и хвостовой балки вертолета. При падении машина полностью разрушилась."
...
ED>Если что – сильно не пинайте.[»]
Всё так. Лебедь практически так и погиб на Ми-8: "При заходе на посадку в 74 км от поселка Ермаковское (район озера Ольское) вертолет зацепил тросы грозозащиты ЛЭП (она не была нанесена на полетную карту). Пилоты попытались избежать столкновения, резко набрав высоту, и это привело к разрушению лопастей несущего винта и хвостовой балки вертолета. При падении машина полностью разрушилась."
Timofey>На мой взгляд, Ка-32 довольно спокойная машина. История с применением Ка-26 для съемок велогонки московской олимпиады утверждает, что организаторы были в восторге от качества трансляции.
...
Timofey>В Канаде Ка-32ВС11 используются прежде всего на тралевке леса (логгинге). В гораздо меньшей степени они применяются при тушении пожаров и перевозке грузов. (Сайт Brazd'а как-то разжился видео из Канады. Если удасться скачать - можно посмотреть)
Timofey>Эксплуатирующая сторона платит не за простой вертолета на земле, а за его работу в воздухе. Интенсивность эксплуатации доходила до того, что ресурс лопастей 3000 часов вылетывался за чуть больше, чем год.[»]
Вот, пришёл специалист и всё разъяснил на конкретных фактах и примерах. Спасибо.
...
Timofey>В Канаде Ка-32ВС11 используются прежде всего на тралевке леса (логгинге). В гораздо меньшей степени они применяются при тушении пожаров и перевозке грузов. (Сайт Brazd'а как-то разжился видео из Канады. Если удасться скачать - можно посмотреть)
Timofey>Эксплуатирующая сторона платит не за простой вертолета на земле, а за его работу в воздухе. Интенсивность эксплуатации доходила до того, что ресурс лопастей 3000 часов вылетывался за чуть больше, чем год.[»]
Вот, пришёл специалист и всё разъяснил на конкретных фактах и примерах. Спасибо.

Balancer> А хотя бы последнюю страницу посмотреть можно?
Дык знать бы заранее, какую страницу смотреть, из 27-то!
> ЭДСУ не панацея…
Разумеется, но я это к тому, что сложность пилотирования вертолётов классической схемы сегодня значительно снизилась, и поэтому соосники более не имеют в этой области решающего преимущества (такого, например, как имел Ка-25 по сравнению с каким-нить Ми-14).
> Я схемы Ми-28 и Ка-50 в одном масштабе уже раза четыре приводил.
За схемы спасибо. Но они только подтверждают моё предположение. Очевидно, что противник будет целится в область кабины. Снаряды, идущие выше, будут попадать в колонку несущего винта, которая у Ка-50 в три раза выше.
Но это не всё. Ты сравнил площади лобовой проекции одноместного вертолёта и двухместного, что не есть неправильно. Необходимо сравнить Ми-28 с Ка-52 – и вот здесь мы увидим, что вероятность нанесения критических повреждений со стороны ППС выше у Ка-52.
Дык знать бы заранее, какую страницу смотреть, из 27-то!
> ЭДСУ не панацея…
Разумеется, но я это к тому, что сложность пилотирования вертолётов классической схемы сегодня значительно снизилась, и поэтому соосники более не имеют в этой области решающего преимущества (такого, например, как имел Ка-25 по сравнению с каким-нить Ми-14
). > Я схемы Ми-28 и Ка-50 в одном масштабе уже раза четыре приводил.
За схемы спасибо. Но они только подтверждают моё предположение. Очевидно, что противник будет целится в область кабины. Снаряды, идущие выше, будут попадать в колонку несущего винта, которая у Ка-50 в три раза выше.
Но это не всё. Ты сравнил площади лобовой проекции одноместного вертолёта и двухместного, что не есть неправильно. Необходимо сравнить Ми-28 с Ка-52 – и вот здесь мы увидим, что вероятность нанесения критических повреждений со стороны ППС выше у Ка-52.
Это сообщение редактировалось 08.01.2005 в 21:07
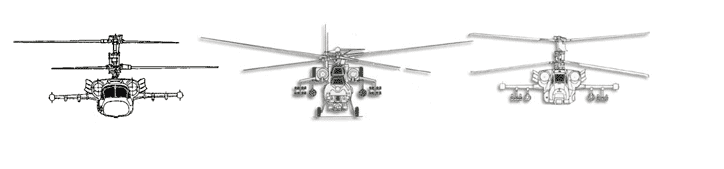
Darth>Но это не всё. Ты сравнил площади лобовой проекции одноместного вертолёта и двухместного, что не есть неправильно. Необходимо сравнить Ми-28 с Ка-52 – и вот здесь мы увидим, что вероятность нанесения критических повреждений со стороны ППС выше у Ка-52.[»]
1. На Ми-28 тандемная посадка пилотов, на Ка-52 - плечом к плечу.
2. Ты сам писал "у Ка-50 зато площадь фронтальной проекции больше". А теперь уже за Ка-52 цепляешься.
Впрочем, не поленился...

Около 17px/м.
Видно, что лобовое сечение Ка-52 практически не выросло (если не обращать внимание на издержки разного контраста чертежей). Более широкая кабина не выходит за габариты прежнего сечения. А некоторый "прирост вниз" наблюдается из-за РЛС.
1. На Ми-28 тандемная посадка пилотов, на Ка-52 - плечом к плечу.
2. Ты сам писал "у Ка-50 зато площадь фронтальной проекции больше". А теперь уже за Ка-52 цепляешься.
Впрочем, не поленился...
Около 17px/м.
Видно, что лобовое сечение Ка-52 практически не выросло (если не обращать внимание на издержки разного контраста чертежей). Более широкая кабина не выходит за габариты прежнего сечения. А некоторый "прирост вниз" наблюдается из-за РЛС.
Balancer> На Ми-28 тандемная посадка пилотов, на Ка-52 - плечом к плечу.
Ну да, это ещё один недостаток соосника – если его ещё и тандемом сделать, он вообще ни в какой ангар не влезет
> Ты сам писал "у Ка-50 зато площадь фронтальной проекции больше".
Это я думал об одном, написал другое. Имел в виду площади проекции поверхностей, при попадании в которые возникают повреждения, несовместимые с продолжением полёта. К таковым со стороны ППС относятся, в частности, колонка винта и остекление кабины.
Теперь (ещё раз спасибо за новую схемку) смотрим: площадь лобовой проекции остекления у Ка-52 раза в полтора больше. При этом попадание одного осколочного снаряда в эту площадь может вывести из строя весь экипаж – вот плата за "плечом к плечу".
Про втулку вообще молчу. Правда на Ми-28 это частично компенсируется выпирающим килем и частью рулевого винта, особенно на отрицательных углах тангажа.
Зато у Ми-28 есть дополнительный минус в виде всего боекомплекта пушки в башенной установке. Вообще непонятное техническое решение.
Ну да, это ещё один недостаток соосника – если его ещё и тандемом сделать, он вообще ни в какой ангар не влезет
> Ты сам писал "у Ка-50 зато площадь фронтальной проекции больше".
Это я думал об одном, написал другое
. Имел в виду площади проекции поверхностей, при попадании в которые возникают повреждения, несовместимые с продолжением полёта. К таковым со стороны ППС относятся, в частности, колонка винта и остекление кабины.Теперь (ещё раз спасибо за новую схемку
) смотрим: площадь лобовой проекции остекления у Ка-52 раза в полтора больше. При этом попадание одного осколочного снаряда в эту площадь может вывести из строя весь экипаж – вот плата за "плечом к плечу".Про втулку вообще молчу. Правда на Ми-28 это частично компенсируется выпирающим килем и частью рулевого винта, особенно на отрицательных углах тангажа.
Зато у Ми-28 есть дополнительный минус в виде всего боекомплекта пушки в башенной установке. Вообще непонятное техническое решение.
Это сообщение редактировалось 08.01.2005 в 21:08

Ресурс планера у Ка-27 и его семейства, ниже чем у Ми-8 из-за условий эксплуатации, морской воздух не очень благоприятно действует на планер, вряд ли ресурс планера Ми-14 высокий, да и у Ми-8 в аналогичных условиях тоже будет не высокий.
Darth>Ну да, это ещё один недостаток соосника – если его ещё и тандемом сделать, он вообще ни в какой ангар не влезет
Кхм. Фюзеляж Ми-28 на 3.5 метра длиннее, чем Ка-50/52. Это без учёта рулевого и несущего винтов. С ними - ещё больше. Или ты о чём?
Кхм. Фюзеляж Ми-28 на 3.5 метра длиннее, чем Ка-50/52. Это без учёта рулевого и несущего винтов. С ними - ещё больше. Или ты о чём?

Я о высоте – не пролезет в дверь
Гон какой-то. Посмотри на Кобру. А тот тандем что на Ми-28-это порно натуральнеое.
Darth
Соосники в принципе непригодны для засад, из-за соосной схемы приборы наблюдения только на корпусе, прятаться не могут.
Соосники в принципе непригодны для засад, из-за соосной схемы приборы наблюдения только на корпусе, прятаться не могут.
вантох>Соосники в принципе непригодны для засад, из-за соосной схемы приборы наблюдения только на корпусе, прятаться не могут.[»]
Один из мифов. Во-первых, высокое размещение РЛС не даёт существенной выгоды из-за трудностей с точным позиционированием при динамических подскоках (для Ми-28 это вообще родовая проблема), во-вторых, на соосниках вполне себе размещают РЛС над втулкой.
Есть надвтулочный "Арбалет", есть Ка-50Ш и Ка-52 с ним. Только их фоток у меня нет
Один из мифов. Во-первых, высокое размещение РЛС не даёт существенной выгоды из-за трудностей с точным позиционированием при динамических подскоках (для Ми-28 это вообще родовая проблема), во-вторых, на соосниках вполне себе размещают РЛС над втулкой.
Есть надвтулочный "Арбалет", есть Ка-50Ш и Ка-52 с ним. Только их фоток у меня нет
Balancer
Дело не в позиционировании -машина в засаде прячет "тело жирное" в складках местности или за зеленкой, высовывая только над втулку, резко уменьшая свою всяческую заметность. Идеально вообще из висения на чем-нибудь телескопическом глаз поднимать.
Интересно, получается со времен летнего обсуждения есть подвижки с тем что над втулкой у Ка?
Знаю что в прошлом году были проблемы с надвтулочной станцией у Ми-28Н(вроде"Алмаз" называется), что сейчас не очень понятно. И что интересно с боковым стеклом у Ка-50, оно реально сейчас точно броне, а то враги всякое говорят B) .
Дело не в позиционировании -машина в засаде прячет "тело жирное" в складках местности или за зеленкой, высовывая только над втулку, резко уменьшая свою всяческую заметность. Идеально вообще из висения на чем-нибудь телескопическом глаз поднимать.
Интересно, получается со времен летнего обсуждения
есть подвижки с тем что над втулкой у Ка?Знаю что в прошлом году были проблемы с надвтулочной станцией у Ми-28Н(вроде"Алмаз" называется), что сейчас не очень понятно. И что интересно с боковым стеклом у Ка-50, оно реально сейчас точно броне, а то враги всякое говорят B) .
Вантох, Balancer
Да какая разница, где у него РЛС/ОЭПС? Для стрельбы "Вихрем" всё равно придется из-за холма полностью вылезти. А момент начала атаки, для повышения степени внезапности, придётся определять только по данным внешнего ЦУ, до тех пор, пока у самого Ка-50/52 какой-нить надвтулочной оптики не появится (РЛС не в счёт – какая с ней внезапность?).
Да какая разница, где у него РЛС/ОЭПС? Для стрельбы "Вихрем" всё равно придется из-за холма полностью вылезти. А момент начала атаки, для повышения степени внезапности, придётся определять только по данным внешнего ЦУ, до тех пор, пока у самого Ка-50/52 какой-нить надвтулочной оптики не появится (РЛС не в счёт – какая с ней внезапность?).

вантох>Дело не в позиционировании -машина в засаде прячет "тело жирное" в складках местности или за зеленкой, высовывая только над втулку, резко уменьшая свою всяческую заметность.
Ерунда. Тот же Apache десять лет успешно жил с оптикой на морде безо всяких там РЛС и ничего.
Ерунда. Тот же Apache десять лет успешно жил с оптикой на морде безо всяких там РЛС и ничего.
Balancer>Один из мифов. Во-первых, высокое размещение РЛС не даёт существенной выгоды из-за трудностей с точным позиционированием при динамических подскоках (для Ми-28 это вообще родовая проблема),
Руки кривые, вот и проблема. У Apache вон никаких проблем нет, все прекрасно пашет хоть запрыгайся.
Руки кривые, вот и проблема. У Apache вон никаких проблем нет, все прекрасно пашет хоть запрыгайся.
ED>Случаи перерубания – элементарные ошибки пилотирования.
n-дцатый раз уже повторяю: это ошибки конструирования, а не пилотирования. Поставьте балку как у AH-64, и хрен ее кто перерубит.
n-дцатый раз уже повторяю: это ошибки конструирования, а не пилотирования. Поставьте балку как у AH-64, и хрен ее кто перерубит.

вантох>Balancer
вантох>
... И что интересно с боковым стеклом у Ка-50, оно реально сейчас точно броне, а то враги всякое говорят B) .[»]
А разве их планировали сделать бронированными?
ИМХО остекление дверей как было из плекса так и осталось. Главное чтобы от ударной волны собственной пушки стекла не вылетали, так с этим вроде справились.
вантох>
... И что интересно с боковым стеклом у Ка-50, оно реально сейчас точно броне, а то враги всякое говорят B) .[»]
А разве их планировали сделать бронированными?
ИМХО остекление дверей как было из плекса так и осталось. Главное чтобы от ударной волны собственной пушки стекла не вылетали, так с этим вроде справились.
Chizh>А разве их планировали сделать бронированными?
Chizh>ИМХО остекление дверей как было из плекса так и осталось.
А черт их знает. Непонятно. На выставке в свое время смотрел, вроде обычный плекс. Но мало ли что там КБ пригнало. У них каждый экземпляр разный. Вот у Ка-52 точно сплошной плекс, там такая площадь и кривизна.
Chizh>ИМХО остекление дверей как было из плекса так и осталось.
А черт их знает. Непонятно. На выставке в свое время смотрел, вроде обычный плекс. Но мало ли что там КБ пригнало. У них каждый экземпляр разный. Вот у Ка-52 точно сплошной плекс, там такая площадь и кривизна.
Читал старые топики
http://forums.airbase.ru/?showtopic=10449
http://forums.airbase.ru/?showtopic=21586
и нашёл очень интересное высказывание:
[quote|Moos_Onee, 18.04.2003 14:45:00:]
Теперь, уж не обижайтесь, сударь, расскажу я Вам то, чего Вы, наверное, не знаете. И не Ваша в том вина, просто в СССР ввиду отсутствия двухлопастных машин их аэродинамику не изучали. А вот зарубежный опыт говорит о том, что есть такое очень гнусное понятие как low G conditions. Суть его в том, что при попадании лопастей в сектор 0-180 градусов и создании при этом перегрузки менее 1 (а в любом прямолинейном горизонтальном полёте, как Вы знаете перегрузка всегда равняется 1), то есть при появлении ощущения light-on-weight вертолёт переходит в неуправляемое вращение относительно продольной оси за счёт того что с НВ снимается подъёмная сила. Согласно методик до это состояния вертолёт доводить нельзя. А если случился такой казус, то нужно пересилить инстинкт и не давать ручку против вращения, а энергично брать её на себя чтобы "загрузить" винт, создать на нём положительную перегрузку и сделать его снова управляющим органом. Вращение это опасное происходит за счёт момента от рулевого винта относительно ЦТ вертолёта. Так как на "нашем" вертолёте рулевого винта нет, то в данной ситуации я даже затруднюсь предсказать поведение машины. Причём чем легче винт аэродинамически и по весу, тем легче "загнать" машину в опасное положение.
[/quote]
То есть классическая схема с двухлопастным НВ имеет собственный врождённый недостаток. За простоту конструкции надо платить риском low G.
Если же мы применим двухлопастные НВ в соосной схеме (как на аппаратах Gyrodyne), то, ПМСМ, от опасности low G мы будем избавлены. Ведь чтобы оба НВ одновременно находились в продольной плоскости вертолёта — это надо специально постараться. И к тому же отсутствует рулевой винт, смещённый относительно ЦТ вертолёта по вертикали, который и вовлекает аппарат в нехорошее вращение при low G.
По-моему, это ещё один довод в пользу соосной схемы.
http://forums.airbase.ru/?showtopic=10449
http://forums.airbase.ru/?showtopic=21586
и нашёл очень интересное высказывание:
[quote|Moos_Onee, 18.04.2003 14:45:00:]
Теперь, уж не обижайтесь, сударь, расскажу я Вам то, чего Вы, наверное, не знаете. И не Ваша в том вина, просто в СССР ввиду отсутствия двухлопастных машин их аэродинамику не изучали. А вот зарубежный опыт говорит о том, что есть такое очень гнусное понятие как low G conditions. Суть его в том, что при попадании лопастей в сектор 0-180 градусов и создании при этом перегрузки менее 1 (а в любом прямолинейном горизонтальном полёте, как Вы знаете перегрузка всегда равняется 1), то есть при появлении ощущения light-on-weight вертолёт переходит в неуправляемое вращение относительно продольной оси за счёт того что с НВ снимается подъёмная сила. Согласно методик до это состояния вертолёт доводить нельзя. А если случился такой казус, то нужно пересилить инстинкт и не давать ручку против вращения, а энергично брать её на себя чтобы "загрузить" винт, создать на нём положительную перегрузку и сделать его снова управляющим органом. Вращение это опасное происходит за счёт момента от рулевого винта относительно ЦТ вертолёта. Так как на "нашем" вертолёте рулевого винта нет, то в данной ситуации я даже затруднюсь предсказать поведение машины. Причём чем легче винт аэродинамически и по весу, тем легче "загнать" машину в опасное положение.
[»]
[/quote]
То есть классическая схема с двухлопастным НВ имеет собственный врождённый недостаток. За простоту конструкции надо платить риском low G.
Если же мы применим двухлопастные НВ в соосной схеме (как на аппаратах Gyrodyne), то, ПМСМ, от опасности low G мы будем избавлены. Ведь чтобы оба НВ одновременно находились в продольной плоскости вертолёта — это надо специально постараться.
И к тому же отсутствует рулевой винт, смещённый относительно ЦТ вертолёта по вертикали, который и вовлекает аппарат в нехорошее вращение при low G.По-моему, это ещё один довод в пользу соосной схемы.
Реклама Google — средство выживания форумов :)

capt
новичок
Приветствую!
Прочитать сразу всё(29 страниц) не смог,честно.Поэтому если уже кто-либо затрагивал вопрос,то прошу прощения.
Итак, на мой взгляд при нынешнем развитии техники вертолёт с соосной схемой не будет создан тяжелее Ка-32 (13тонн,ага?).В то же время схема НВ+РВ достигает 50(?)тонн(Ми-26),за точность цифирей не бейте,но поправьте.Ещё тяжелее,видимо, можно построить используя поперечную схему (а может и продольную?).Мысль в том,что с дальнейшем увеличением взлётной массы будет расти естественным образом Rнв,и,конечно,расстояние между НВ,и масса собственно конструкции будет расти "слишком быстро",в относительных величинах,то есть не приведёт ли это в конечном итоге к тому, что вертолёт будет возить сам себя?
Утрирую,конечно,но никто не пытался сапроксимировать на основе статистических данных подобные графики?
С уважением,кэп.
Прочитать сразу всё(29 страниц) не смог,честно.Поэтому если уже кто-либо затрагивал вопрос,то прошу прощения.
Итак, на мой взгляд при нынешнем развитии техники вертолёт с соосной схемой не будет создан тяжелее Ка-32 (13тонн,ага?).В то же время схема НВ+РВ достигает 50(?)тонн(Ми-26),за точность цифирей не бейте,но поправьте.Ещё тяжелее,видимо, можно построить используя поперечную схему (а может и продольную?).Мысль в том,что с дальнейшем увеличением взлётной массы будет расти естественным образом Rнв,и,конечно,расстояние между НВ,и масса собственно конструкции будет расти "слишком быстро",в относительных величинах,то есть не приведёт ли это в конечном итоге к тому, что вертолёт будет возить сам себя?
Утрирую,конечно,но никто не пытался сапроксимировать на основе статистических данных подобные графики?
С уважением,кэп.
Copyright © Balancer 1997..2019
Создано 14.06.2001
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.06.2001
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
