-
![[image]](https://www.balancer.ru/cache/forums/attaches/2016/07/128x128-crop/03-4226839-bentos-300-anatolij-tavricheskij.jpg)
Исследовательские подводные аппараты
Теги:
 parohod
parohod
Map> Похоже, МИРы пристроили
нет не похоже. Более похоже что желтая газетенка "Известия" как обычно порет чушь (и не жалко им Чушь?! ей же больно)
нет не похоже. Более похоже что желтая газетенка "Известия" как обычно порет чушь (и не жалко им Чушь?! ей же больно)


 инфо
инфо инструменты
инструменты
parohod> нет не похоже. Более похоже что желтая газетенка "Известия" как обычно порет чушь (и не жалко им Чушь?! ей же больно)
Встретил тут ( Логово барсика - Эта планета буджет нашей! - 3
) правильную оценку военных новостей Известий от знающего человека (из ЦОВУ ВМФ)
"Читайте далее: «Глубоководный спецназ» будет работать в Арктике - Известия
Кто-то в Известиях явно обнаружил тайную деляночку. Возможно даже с грибами. Но гордиться можно и нужно. Ну и целый анонимный рой представителей ОПК, главных и генеральных штабов и т.д. кружит у окон издательства. Хехехе.
PS. Парадовался за британский Джейн. ЦРУ там или МИ-6 какой не смогли! А они единственные смогли!"
Встретил тут ( Логово барсика - Эта планета буджет нашей! - 3
) правильную оценку военных новостей Известий от знающего человека (из ЦОВУ ВМФ)
"Читайте далее: «Глубоководный спецназ» будет работать в Арктике - Известия
Кто-то в Известиях явно обнаружил тайную деляночку. Возможно даже с грибами. Но гордиться можно и нужно. Ну и целый анонимный рой представителей ОПК, главных и генеральных штабов и т.д. кружит у окон издательства. Хехехе.
PS. Парадовался за британский Джейн. ЦРУ там или МИ-6 какой не смогли! А они единственные смогли!"


Прошу прощения за вопрос от новичка, но я не очень понимаю, что подразумевается под термином "возможности вертикального маневрирования" во фразе "Так, например, по скорости подводного хода, возможности вертикального маневрирования, энергообеспечению и автономности пребывания под водой им и сейчас нет равных., энергообеспечению и автономности пребывания под водой им и сейчас нет равных." Это из статьи The Ocean - «Миры» в МИРе (Морской Истории России)
Как измеряются эти возможности "вертикального маневрирования"? Чем обеспечиваются? Двигателями? Рулями?
Просто по скорости МИРы из аккумуляторных дают аж 5 узлов, по энергообеспечению - 100 Квт, по автономности 72 часа. А вот про вертикальное маневрирование не могу найти.... Что это? Есть ли данные в цифрах?
Как измеряются эти возможности "вертикального маневрирования"? Чем обеспечиваются? Двигателями? Рулями?
Просто по скорости МИРы из аккумуляторных дают аж 5 узлов, по энергообеспечению - 100 Квт, по автономности 72 часа. А вот про вертикальное маневрирование не могу найти.... Что это? Есть ли данные в цифрах?


Map> Не смог найти грузоподъемность у телеуправляемых аппаратов, - есть ли данные по максимальной грузоподъемности у отечественных и импортных ROV ?
Я не спец по ТПА, но НЯЗ у ТПА нет системы погружения всплытия с изменяемой плавучестью. У них она нулевая,соответственно поднять они что-то могут только на упоре винтов или сбросив некий балласт(что очень редко). А это вряд ли очень много. Из всего что я прочитал на эту тему,ТПА как правило служат для остропки объекта, а поднимает его уже судно обеспечения. ГОА же весьма значительно могут изменять свою плавучесть,за счет балластных и уравнительных цистерн или сбрасываемого балласта.
Map> А есть ли кадры подъема других аппаратов на подобной волне? С похожим водоизмещением и другим подъемным устройством?
Навскидку,но без волнения:
Гуглите Ютуб по запросам alvin submersible, nautile, sea cliff, turtle, shinkai 6500, jiaolong.
Map> А вот про вертикальное маневрирование не могу найти.... Что это? Есть ли данные в цифрах?
Я не знаю,что Сагалевич имел в виду. У "Миров" для вертикального маневрирования, боковые поворотные колонки и уравнительная система. Все как и у других аппаратов.
Я не спец по ТПА, но НЯЗ у ТПА нет системы погружения всплытия с изменяемой плавучестью. У них она нулевая,соответственно поднять они что-то могут только на упоре винтов или сбросив некий балласт(что очень редко). А это вряд ли очень много. Из всего что я прочитал на эту тему,ТПА как правило служат для остропки объекта, а поднимает его уже судно обеспечения. ГОА же весьма значительно могут изменять свою плавучесть,за счет балластных и уравнительных цистерн или сбрасываемого балласта.
Map> А есть ли кадры подъема других аппаратов на подобной волне? С похожим водоизмещением и другим подъемным устройством?
Навскидку,но без волнения:
Гуглите Ютуб по запросам alvin submersible, nautile, sea cliff, turtle, shinkai 6500, jiaolong.
Map> А вот про вертикальное маневрирование не могу найти.... Что это? Есть ли данные в цифрах?
Я не знаю,что Сагалевич имел в виду. У "Миров" для вертикального маневрирования, боковые поворотные колонки и уравнительная система. Все как и у других аппаратов.



Map> На днях их погрузили на новейший корабль ГУГИ «Янтарь».
Вы не правы, на "Янтарь" погрузили только грузовые макеты "Миров", а сами Миры в ангаре.
Вы не правы, на "Янтарь" погрузили только грузовые макеты "Миров", а сами Миры в ангаре.
Map> я не очень понимаю, что подразумевается под термином "возможности вертикального маневрирования"
Хороший вопрос, но новички таких вопросов не задают.
Хороший вопрос, но новички таких вопросов не задают.
Map>> я не очень понимаю, что подразумевается под термином "возможности вертикального маневрирования"
Mihalych> Хороший вопрос, но новички таких вопросов не задают.
Пытался найти на российских сайтах детали управления исследовательскими аппаратами при отборе образов грунта. Из книг Сагалевича, Подражанского и Войтова это не понятно. Но ведь собранные образцы увеличиват вес, - как я понимаю, в рамках грузоподъемности аппарата. И отбирая образцы у курильщиков или на склонах Байкала, видимо, надо иметь возможность маневриравания по вертикали. Вот и интересно, как это обеспечивается? Если только двигателями, то мне кажется это энергозатратно. Если уравнительной системой, то любопытны ее параметры.
Правда, меня тот надоумили посмотреть подъемы различных аппаратов на Ютубе, похоже, и вопрос о возможностях вертикального маневрирования надо прогуглить для себя.
Mihalych> Хороший вопрос, но новички таких вопросов не задают.
Пытался найти на российских сайтах детали управления исследовательскими аппаратами при отборе образов грунта. Из книг Сагалевича, Подражанского и Войтова это не понятно. Но ведь собранные образцы увеличиват вес, - как я понимаю, в рамках грузоподъемности аппарата. И отбирая образцы у курильщиков или на склонах Байкала, видимо, надо иметь возможность маневриравания по вертикали. Вот и интересно, как это обеспечивается? Если только двигателями, то мне кажется это энергозатратно. Если уравнительной системой, то любопытны ее параметры.
Правда, меня тот надоумили посмотреть подъемы различных аппаратов на Ютубе, похоже, и вопрос о возможностях вертикального маневрирования надо прогуглить для себя.


Map> Пытался найти на российских сайтах детали управления исследовательскими аппаратами при отборе образов грунта. Из книг Сагалевича, Подражанского и Войтова это не понятно.
В книге А.М. Сагалевича "Глубина" написано,что манипулятор имеет грузоподъемность до 80 кг. И вертикальные перемещения осуществляются посредством вертикальных движителей или откачкой воды из уравнительных цистерн насосом морской воды,что тоже энергозатратно,но заранее рассчитано.
У Д.В. Войтова то же самое. См.раздел про уравнительно-дифферентную систему.
Map> Но ведь собранные образцы увеличиват вес, - как я понимаю, в рамках грузоподъемности аппарата.
Естественно,иначе аппарат получит избыточную отрицательную плавучесть и не сможет всплыть.
Map> Если уравнительной системой, то любопытны ее параметры.
Объем системы 999 литров воды.
Еще есть система аварийного балласта-300 кг. дроби.
Map> о возможностях вертикального маневрирования надо прогуглить для себя.
Читайте книги на эту тему и все со временем станет более-меннее понятно.
В книге А.М. Сагалевича "Глубина" написано,что манипулятор имеет грузоподъемность до 80 кг. И вертикальные перемещения осуществляются посредством вертикальных движителей или откачкой воды из уравнительных цистерн насосом морской воды,что тоже энергозатратно,но заранее рассчитано.
У Д.В. Войтова то же самое. См.раздел про уравнительно-дифферентную систему.
Map> Но ведь собранные образцы увеличиват вес, - как я понимаю, в рамках грузоподъемности аппарата.
Естественно,иначе аппарат получит избыточную отрицательную плавучесть и не сможет всплыть.
Map> Если уравнительной системой, то любопытны ее параметры.
Объем системы 999 литров воды.
Еще есть система аварийного балласта-300 кг. дроби.
Map> о возможностях вертикального маневрирования надо прогуглить для себя.
Читайте книги на эту тему и все со временем станет более-меннее понятно.
Map>> Пытался найти на российских сайтах детали управления исследовательскими аппаратами ....
Gogs> Объем системы 999 литров воды.
Gogs> Еще есть система аварийного балласта-300 кг. дроби.
Map>> о возможностях вертикального маневрирования надо прогуглить для себя.
Gogs> Читайте книги на эту тему и все со временем станет более-меннее понятно.
Согласен, данные об объемах баластных цистерн и весе аварийного балласта есть, но хотелось бы узнать "детали управления". Ведь на поверхности температура воды выше, чем на больших глубинах, а значит в ходе работ и сфера, и баластные цистерны в объеме уменьшаются, уменьшается и плавучесть аппарата, верно? Если это так, то как это компенсируется, с какой дискретностью? Как часто это приходится делать? Какие еще факторы влияют на изменение плавучести с изменением глубины и продолжительности работы? Понятно, что можно перечитать учебник физики, просто если есть опубликованные методики управления аппаратом, было бы интересно их узнать.
Gogs> Объем системы 999 литров воды.
Gogs> Еще есть система аварийного балласта-300 кг. дроби.
Map>> о возможностях вертикального маневрирования надо прогуглить для себя.
Gogs> Читайте книги на эту тему и все со временем станет более-меннее понятно.
Согласен, данные об объемах баластных цистерн и весе аварийного балласта есть, но хотелось бы узнать "детали управления". Ведь на поверхности температура воды выше, чем на больших глубинах, а значит в ходе работ и сфера, и баластные цистерны в объеме уменьшаются, уменьшается и плавучесть аппарата, верно? Если это так, то как это компенсируется, с какой дискретностью? Как часто это приходится делать? Какие еще факторы влияют на изменение плавучести с изменением глубины и продолжительности работы? Понятно, что можно перечитать учебник физики, просто если есть опубликованные методики управления аппаратом, было бы интересно их узнать.
Map> но хотелось бы узнать "детали управления". Как часто это приходится делать? Какие еще факторы влияют на изменение плавучести с изменением глубины и продолжительности работы?
Это уже очень специфично,я не гидронавт... Тут надо к практикам обращаться или штудировать кучу литературы.
Map> просто если есть опубликованные методики управления аппаратом, было бы интересно их узнать.
Не встречал таких методик.
Это уже очень специфично,я не гидронавт... Тут надо к практикам обращаться или штудировать кучу литературы.
Map> просто если есть опубликованные методики управления аппаратом, было бы интересно их узнать.
Не встречал таких методик.
Map>> просто если есть опубликованные методики управления аппаратом, было бы интересно их узнать.
Gogs> Не встречал таких методик.
Будем искать!;) (голосом Никулина)
Gogs> Не встречал таких методик.
Будем искать!;) (голосом Никулина)
Gogs> Не встречал таких методик.
И чего только не найдешь в .открытых источников"

Всплытие батискафов будет продолжаться дольше погружения, чтобы избежать кессонной болезни, которая может возникнуть при быстром подъеме с такой глубины.
Ой, чувствую, не скоро мои поиски "открытой методики" увенчаются успехом
И чего только не найдешь в .открытых источников"
Батискафы "Мир" начали подъем на поверхность Ледовитого океана
Подводные аппараты "Мир" совершили успешную посадку на глубине свыше 4 километров. Там уже установлен российский триколор из титанового сплава. (Изучение Ледовитого океана. ИНФОграфика) // ria.ruВсплытие батискафов будет продолжаться дольше погружения, чтобы избежать кессонной болезни, которая может возникнуть при быстром подъеме с такой глубины.
Ой, чувствую, не скоро мои поиски "открытой методики" увенчаются успехом
Модернизированный "Шинкай 6500":

"In March 2012, JAMSTEC completed the major upgrade of SHINKAI 6500, which was the largest scale since its launch.
The original main swing-type aft thruster was replaced by two middle-sized fixed-type aft thrusters, and an additional horizontal aft thruster was installed so that the submersible can turn quickly and smoothly. Motors for all thrusters, a hydraulic pump and a sea-water pump were also replaced by new motors for better response, acceleration and braking performance."
"Основной поворотный движитель заменен на два неподвижных движителя малого диаметра и на лаговый движитель для большей маневренности аппарата и точности маневрирования.Также были заменены все двигатели, насос гидравлики и насос морской воды."
До модернизации:
После модернизации:
SHINKAI 6500 < Research Vessels and Vehicles < Research Vessels, Facilities and Equipment < About JAMSTEC < JAMSTEC
SHINKAI 6500 is a manned submersible that can dive to depths of 6,500 meters  deeper than any other manned submersible for academic research all over the world today. In 1991, SHINKAI 6500 began its mission to study seafloor topography and geology and research deep-sea organisms in the Pacific Ocean, Atlantic Ocean, and Indian Ocean as well as the sea around Japan. The total number of dives reached 1300 in 2012. // www.jamstec.go.jp"In March 2012, JAMSTEC completed the major upgrade of SHINKAI 6500, which was the largest scale since its launch.
The original main swing-type aft thruster was replaced by two middle-sized fixed-type aft thrusters, and an additional horizontal aft thruster was installed so that the submersible can turn quickly and smoothly. Motors for all thrusters, a hydraulic pump and a sea-water pump were also replaced by new motors for better response, acceleration and braking performance."
"Основной поворотный движитель заменен на два неподвижных движителя малого диаметра и на лаговый движитель для большей маневренности аппарата и точности маневрирования.Также были заменены все двигатели, насос гидравлики и насос морской воды."
До модернизации:
После модернизации:
Прикреплённые файлы:

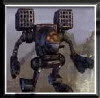
"Алвин" тоже на модернизации-будет нырять на 6500 метров:


Human Occupied Vehicle Alvin : Woods Hole Oceanographic Institution
Woods Hole Oceanographic Institution // www.whoi.edu
Pressure Testing of New Alvin Personnel Sphere Successful : Woods Hole Oceanographic Institution
Woods Hole Oceanographic Institution // www.whoi.edu
Прикреплённые файлы:
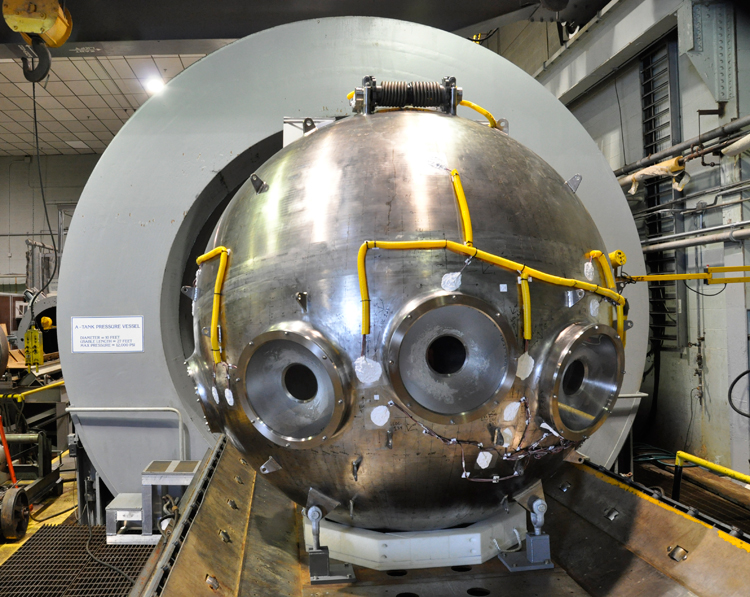

"Наутил" также прошел плановое техобслуживание с модернизацией:

Прикреплённые файлы:

Gogs>> Не встречал таких методик.
Map> Будем искать!;) (голосом Никулина)
Ну вот, оказывается у МИРов точность регулировки скорости вертикального
еремещения с помощью балластной системы от 0 до 40 метров в минуту:
"Другой особенностью ГОА «Мир» является устройство балластной системы. Зарубежные шеститысячники для отрыва аппарата от грунта и всплытия сбрасывают твердый балласт, оставляя на дне либо куски железа («Алвин»), либо мешки с песком («Наутил»). Аппараты «Мир» для балластировки используют только водяной балласт. Перед уходом аппарата с поверхности морская вода заполняет пластиковые цистерны главного балласта емкостью 1,5 м3, которые продуваются сжатым воздухом, когда аппарат выходит на поверхность после погружения. Плавучесть аппарата регулируется с помощью системы переменного балласта путем приема воды в три прочные сферы и откачки ее из сфер насосом высокого давления. Такая система дает практически неограниченные возможности для вертикального маневрирования аппарата и позволяет регулировать скорость погружения и всплытия в широких пределах - от 0 до 35-40 метров в минуту. Дифферентовка аппарата обеспечивается перекачкой водяного балласта из передних балластных сфер в заднюю или наоборот. Стандартный угол наклона носа аппарата лежит в пределах от 0° до 25°. Использование морской воды для тонкой балластировки и для дифферентовки аппарата создает единую систему с общими балластными танками, что, несомненно, является большим преимуществом по сравнению с применением ртути - для ее перекачки нужна отдельная система с дополнительными емкостями и насосами. Кроме того, применение ртути требует принятия дополнительных мер безопасности."
Это из:
Map> Будем искать!;) (голосом Никулина)
Ну вот, оказывается у МИРов точность регулировки скорости вертикального
еремещения с помощью балластной системы от 0 до 40 метров в минуту:
"Другой особенностью ГОА «Мир» является устройство балластной системы. Зарубежные шеститысячники для отрыва аппарата от грунта и всплытия сбрасывают твердый балласт, оставляя на дне либо куски железа («Алвин»), либо мешки с песком («Наутил»). Аппараты «Мир» для балластировки используют только водяной балласт. Перед уходом аппарата с поверхности морская вода заполняет пластиковые цистерны главного балласта емкостью 1,5 м3, которые продуваются сжатым воздухом, когда аппарат выходит на поверхность после погружения. Плавучесть аппарата регулируется с помощью системы переменного балласта путем приема воды в три прочные сферы и откачки ее из сфер насосом высокого давления. Такая система дает практически неограниченные возможности для вертикального маневрирования аппарата и позволяет регулировать скорость погружения и всплытия в широких пределах - от 0 до 35-40 метров в минуту. Дифферентовка аппарата обеспечивается перекачкой водяного балласта из передних балластных сфер в заднюю или наоборот. Стандартный угол наклона носа аппарата лежит в пределах от 0° до 25°. Использование морской воды для тонкой балластировки и для дифферентовки аппарата создает единую систему с общими балластными танками, что, несомненно, является большим преимуществом по сравнению с применением ртути - для ее перекачки нужна отдельная система с дополнительными емкостями и насосами. Кроме того, применение ртути требует принятия дополнительных мер безопасности."
Это из:
http://www.balancer.ru/_cg/_st/ru/... [image link error]
Журнал DiveTek
Журнал DiveTek (ДайвТек) - журнал для увлеченных дайверов. Технологии погружений. Экспедиции. История. // www.dive-tek.ru
Map> Ну вот, оказывается у МИРов точность регулировки скорости вертикального
Map> еремещения с помощью балластной системы от 0 до 40 метров в минуту:
Так это есть в книге Сагалевича. Я не понял, что Вам диапазон скоростей интересен.
"Возможность маневрирования по вертикали" это не совсем скорость. Это может быть и величина ускорения.
Map> еремещения с помощью балластной системы от 0 до 40 метров в минуту:
Так это есть в книге Сагалевича. Я не понял, что Вам диапазон скоростей интересен.
"Возможность маневрирования по вертикали" это не совсем скорость. Это может быть и величина ускорения.
Map>> Ну вот, оказывается у МИРов точность регулировки скорости вертикального
Map>> еремещения с помощью балластной системы от 0 до 40 метров в минуту:
Gogs> Так это есть в книге Сагалевича. Я не понял, что Вам диапазон скоростей интересен.
Gogs> "Возможность маневрирования по вертикали" это не совсем скорость. Это может быть и величина ускорения.
Мне кажется, что величина ускорения для научного аппарата не столь важна, как возможность работы на скоростях вертикального маневрирования в пределах первых сантиметров в минуту. Можно ее достич и вертикальными двигателями, но, думаю, перепад температур "поверхность - дно", обжатие, изменение плотности воды не позволят постоянно компенсировать сумму всех факторов, изменяющих плавучесть, компенсировать исключительно двигателями..
Вот подобную задачу, как я понимаю, и решает уравнительная система. Как видно из источников, они бывают "одинаковый объем - разный вес" и "одинаковый вес - разный объем". Первый вариант только на воде (заполнили цисцерны - откачали излишки) или на "вода - груз", - надо глубже, берем воду, надо повыше, сбрасываем груз (дробь, чушки и т.д.) Второй вариант пока нашел у Аргуса, где есть слова о маслянных мешках, в которые закачивается масло из цистерны.
Возможно есть и другие варианты, но их пока не нашел.
Мне хочется понять, в чем преимущество того или иного варианта. В качестве критерия выбрал Минимальная скорость вертикального перемещения с учетом увеличения продолжительности пребывания под водой в работоспособном состоянии. Вопросы жизнеобеспечения, энергетики, погодные при подъеме и ряд других тоже интересен, собираю материалы и по ним.
Если эти вопросы не для этой ветки, скажите, не буду отвлекать вас своими вопросами и предположениями.
Map>> еремещения с помощью балластной системы от 0 до 40 метров в минуту:
Gogs> Так это есть в книге Сагалевича. Я не понял, что Вам диапазон скоростей интересен.
Gogs> "Возможность маневрирования по вертикали" это не совсем скорость. Это может быть и величина ускорения.
Мне кажется, что величина ускорения для научного аппарата не столь важна, как возможность работы на скоростях вертикального маневрирования в пределах первых сантиметров в минуту. Можно ее достич и вертикальными двигателями, но, думаю, перепад температур "поверхность - дно", обжатие, изменение плотности воды не позволят постоянно компенсировать сумму всех факторов, изменяющих плавучесть, компенсировать исключительно двигателями..
Вот подобную задачу, как я понимаю, и решает уравнительная система. Как видно из источников, они бывают "одинаковый объем - разный вес" и "одинаковый вес - разный объем". Первый вариант только на воде (заполнили цисцерны - откачали излишки) или на "вода - груз", - надо глубже, берем воду, надо повыше, сбрасываем груз (дробь, чушки и т.д.) Второй вариант пока нашел у Аргуса, где есть слова о маслянных мешках, в которые закачивается масло из цистерны.
Возможно есть и другие варианты, но их пока не нашел.
Мне хочется понять, в чем преимущество того или иного варианта. В качестве критерия выбрал Минимальная скорость вертикального перемещения с учетом увеличения продолжительности пребывания под водой в работоспособном состоянии. Вопросы жизнеобеспечения, энергетики, погодные при подъеме и ряд других тоже интересен, собираю материалы и по ним.
Если эти вопросы не для этой ветки, скажите, не буду отвлекать вас своими вопросами и предположениями.
Gogs>> "Возможность маневрирования по вертикали" это не совсем скорость. Это может быть и величина ускорения.
Кажется, нашел документальное подтверждение своей догадки о необходимости иметь возможность нулевой вертикальной скорости при работе на склоне и желании взять пробы с помощью манипулятора: "склон был настолько крут, что буквально негде было «приткнуться», чтобы взять манипулятором пробу грунта."
Цитата из материала:

У Аргуса есть вертикальные двигатели, с их помощью можно было бы компенсировать отрицательную плавучесть. Не удалось? У Аргуса есть уравнительная система. Она не позволяет удерживать нулевую вертикальную скорость? Что то еще?
Кажется, нашел документальное подтверждение своей догадки о необходимости иметь возможность нулевой вертикальной скорости при работе на склоне и желании взять пробы с помощью манипулятора: "склон был настолько крут, что буквально негде было «приткнуться», чтобы взять манипулятором пробу грунта."
Цитата из материала:
Исследования ведет "Аргус" - Экспедиции. - Каталог статей - История мирового судостроения.
9.11.12 HMS Warrior 1860 // hmhsbritannic.ucoz.ruУ Аргуса есть вертикальные двигатели, с их помощью можно было бы компенсировать отрицательную плавучесть. Не удалось? У Аргуса есть уравнительная система. Она не позволяет удерживать нулевую вертикальную скорость? Что то еще?
Gogs>>> "Возможность маневрирования по вертикали" это не совсем скорость. Это может быть и величина ускорения.
А вот и методика работы научного аппарата при проведении оптических исследований из той же статьи:
... как зафиксировать в пространстве светоприемники, установленные на подводном аппарате? Ведь самый искусный пилот не может заставить его совершенно неподвижно зависнуть в толще воды. В лучшем случае аппарат может очень медленно погружаться и, кроме того, он обязательно перемещается в горизонтальном направлении под действием течения. Выход из положения был найден очень простой. На глубине около 100 метров мы установили небольшой заякоренный буй. «Аргус» подходил к бую, брал захватом манипулятора буйреп и погружался вдоль него до дна. Затем начинался подъем за счет небольшой положительной плавучести аппарата. На нужной глубине пилот намертво зажимал захватом буйреп, и «Аргус» неподвижно зависал, удерживаемый якорем. После регистрации на ленте осциллографа колебаний подводной освещенности аппарат переходил на следующий горизонт. В результате были зарегистрированы колебания подводной освещенности на глубинах в несколько десятков метров. Получить такие данные без помощи подводного аппарата едва ли возможно.
А вот и методика работы научного аппарата при проведении оптических исследований из той же статьи:
... как зафиксировать в пространстве светоприемники, установленные на подводном аппарате? Ведь самый искусный пилот не может заставить его совершенно неподвижно зависнуть в толще воды. В лучшем случае аппарат может очень медленно погружаться и, кроме того, он обязательно перемещается в горизонтальном направлении под действием течения. Выход из положения был найден очень простой. На глубине около 100 метров мы установили небольшой заякоренный буй. «Аргус» подходил к бую, брал захватом манипулятора буйреп и погружался вдоль него до дна. Затем начинался подъем за счет небольшой положительной плавучести аппарата. На нужной глубине пилот намертво зажимал захватом буйреп, и «Аргус» неподвижно зависал, удерживаемый якорем. После регистрации на ленте осциллографа колебаний подводной освещенности аппарат переходил на следующий горизонт. В результате были зарегистрированы колебания подводной освещенности на глубинах в несколько десятков метров. Получить такие данные без помощи подводного аппарата едва ли возможно.
Gogs> // 04-07-2012 //
Gogs> Поздравляем первых в России пилотов АОПА "DeepWorker" с успешным окончанием курса обучения!
Gogs> "Завершился двухэтапный курс обучения специалистов НПП «Севморгео» управлению автономным обитаемым подводным аппаратом (АОПА) «DeepWorker».
Видео подготовки к спуску этого замечательного аппарата. Неужели и при спусках других аппаратов все так же просто и как то по семейному?
Gogs> Поздравляем первых в России пилотов АОПА "DeepWorker" с успешным окончанием курса обучения!
Gogs> "Завершился двухэтапный курс обучения специалистов НПП «Севморгео» управлению автономным обитаемым подводным аппаратом (АОПА) «DeepWorker».
Видео подготовки к спуску этого замечательного аппарата. Неужели и при спусках других аппаратов все так же просто и как то по семейному?

Map> Видео подготовки к спуску этого замечательного аппарата. Неужели и при спусках других аппаратов все так же просто и как то по семейному?
Прошу прощения, в предыдущем посте ссылка на видео почему-то преобразовалась и отображается некорректно.
Видео можно посмотреть или на яндексе, введя запрос Deepworker submarines at Pavilion Lake , либо скопируйте эту ссылку
m.youtube.com/#/watch?v=Fq5DoD66MHY&desktop_uri=%2Fwatch%3Fv%3DFq5DoD66MHY&gl=RU
поставив перед ней http://
Прошу прощения, в предыдущем посте ссылка на видео почему-то преобразовалась и отображается некорректно.
Видео можно посмотреть или на яндексе, введя запрос Deepworker submarines at Pavilion Lake , либо скопируйте эту ссылку
m.youtube.com/#/watch?v=Fq5DoD66MHY&desktop_uri=%2Fwatch%3Fv%3DFq5DoD66MHY&gl=RU
поставив перед ней http://
Map> Вот подобную задачу, как я понимаю, и решает уравнительная система.
Ну да так и есть. Насколько я понимаю,нулевая плавучесть (т.е. относительно неподвижное положение в толще воды) в большинстве случаев достигается при помощи уравнительной системы,а двигатели как правило для манврирования.Но почти всегда присутствует течение,которое смещает аппарат по вертикали,по горизонтали или одновременно и туда и туда.
Map> Мне хочется понять, в чем преимущество того или иного варианта.
Ну чаще применяется водяной балласт.
Map> Вопросы жизнеобеспечения, энергетики, погодные при подъеме и ряд других тоже интересен, собираю материалы и по ним.
В этой ветке я много литературы привел на эту тему.
Map> Если эти вопросы не для этой ветки, скажите, не буду отвлекать вас своими вопросами и предположениями.
Да для этой конечно,но у меня не на все вопросы есть ответы.
Map> Кажется, нашел документальное подтверждение своей догадки о необходимости иметь возможность нулевой вертикальной скорости при работе на склоне и желании взять пробы с помощью манипулятора:
Для этого желателен второй манипулятор. Одним зафиксироваться за что-нибудь,а вторым работать.
Map> У Аргуса есть вертикальные двигатели, с их помощью можно было бы компенсировать отрицательную плавучесть. Не удалось? У Аргуса есть уравнительная система. Она не позволяет удерживать нулевую вертикальную скорость? Что то еще?
Честно говоря не знаю,что там у них за проблемы с регулировкой плавучести при помощи УС.А за счет двигателей строго удерживаться на месте вряд ли возможно-они дают весьма мощный упор.
Map> Неужели и при спусках других аппаратов все так же просто и как то по семейному?
Нет конечно,тут же тепличные условия.
Ну да так и есть. Насколько я понимаю,нулевая плавучесть (т.е. относительно неподвижное положение в толще воды) в большинстве случаев достигается при помощи уравнительной системы,а двигатели как правило для манврирования.Но почти всегда присутствует течение,которое смещает аппарат по вертикали,по горизонтали или одновременно и туда и туда.
Map> Мне хочется понять, в чем преимущество того или иного варианта.
Ну чаще применяется водяной балласт.
Map> Вопросы жизнеобеспечения, энергетики, погодные при подъеме и ряд других тоже интересен, собираю материалы и по ним.
В этой ветке я много литературы привел на эту тему.
Map> Если эти вопросы не для этой ветки, скажите, не буду отвлекать вас своими вопросами и предположениями.
Да для этой конечно,но у меня не на все вопросы есть ответы.
Map> Кажется, нашел документальное подтверждение своей догадки о необходимости иметь возможность нулевой вертикальной скорости при работе на склоне и желании взять пробы с помощью манипулятора:
Для этого желателен второй манипулятор. Одним зафиксироваться за что-нибудь,а вторым работать.
Map> У Аргуса есть вертикальные двигатели, с их помощью можно было бы компенсировать отрицательную плавучесть. Не удалось? У Аргуса есть уравнительная система. Она не позволяет удерживать нулевую вертикальную скорость? Что то еще?
Честно говоря не знаю,что там у них за проблемы с регулировкой плавучести при помощи УС.А за счет двигателей строго удерживаться на месте вряд ли возможно-они дают весьма мощный упор.
Map> Неужели и при спусках других аппаратов все так же просто и как то по семейному?
Нет конечно,тут же тепличные условия.
Новый аппарат в арсенале русских гидронавтов!
И нам оказывается нужен свой Кусто... А мужики то не знали! Куча уже существующих супергидронавтов не в счет...
С уже имеющимися людьми и техникой сейчас можно сделать такой информационный научно-популярный ОТЕЧЕСТВЕННЫЙ продукт,что Кусто, при всем к нему уважении, будет "нервно курить в сторонке"! Нам только нужен патриот с ресурсом и мышлением уровня Кусто-Джеймса Камерона.


И нам оказывается нужен свой Кусто... А мужики то не знали! Куча уже существующих супергидронавтов не в счет...
С уже имеющимися людьми и техникой сейчас можно сделать такой информационный научно-популярный ОТЕЧЕСТВЕННЫЙ продукт,что Кусто, при всем к нему уважении, будет "нервно курить в сторонке"! Нам только нужен патриот с ресурсом и мышлением уровня Кусто-Джеймса Камерона.
Сергей Шойгу: «Нам нужен свой Кусто!» : Русское географическое общество, РГО
Всероссийское общественное объединение | Основано в 1845 году // www.rgo.ruC-Quester 3 (3-persons 100m) - U-Boat Worx
The C-Quester 3 is the best choice for anyone looking for a robust, spacious and easy to handle submersible. Specially designed for exploring the underwater world in the luxury of a one-atmosphere pressure hull with air conditioning, the C-Quester 3 sets // www.uboatworx.com
Прикреплённые файлы:


"Шойгу нужен русский Жак-Ив Кусто
Глава МЧС Сергей Шойгу, занимающий также должность президента Русского географического общества, пообещал ученым к февралю следующего года снарядить исследовательский корабль, который по образу "Калипсо" Жака-Ива Кусто будет изучать мировой океан и снимать документальные фильмы.
Шойгу отметил, что одной из задач корабля будет съемка научно-популярных фильмов, в связи с чем сейчас ищут талантливого режиссера. "Нам нужен российский Жак-Ив Кусто!" — заявил Шойгу. Он пояснил, что все оборудование для съемок фильмов планируется установить на корабле.
Речь идет об учебно-производственном судне "Профессор Хлюстин", которое сейчас принадлежит Морскому государственному университету имени адмирала Невельского. Он будет первым исследовательским судном РГО. По словам Шойгу, в первой половине июня корабль будет помещен в док для ремонта ходовой части. Затем его оснастят самым современным оборудованием. "Конечно, мы хотели бы, чтобы на нем был гидроплан, конечно, на нем будет вертолет, думаем, что в ближайшие три года появится глубоководный аппарат", — отметил Шойгу."
http://hronika911.ru/detail23313.html
А Сагалевич не может найти 50 млн евро на кругосветку всемирно известного "Келдыша"с двумя ГОА. Что за бред?
Глава МЧС Сергей Шойгу, занимающий также должность президента Русского географического общества, пообещал ученым к февралю следующего года снарядить исследовательский корабль, который по образу "Калипсо" Жака-Ива Кусто будет изучать мировой океан и снимать документальные фильмы.
Шойгу отметил, что одной из задач корабля будет съемка научно-популярных фильмов, в связи с чем сейчас ищут талантливого режиссера. "Нам нужен российский Жак-Ив Кусто!" — заявил Шойгу. Он пояснил, что все оборудование для съемок фильмов планируется установить на корабле.
Речь идет об учебно-производственном судне "Профессор Хлюстин", которое сейчас принадлежит Морскому государственному университету имени адмирала Невельского. Он будет первым исследовательским судном РГО. По словам Шойгу, в первой половине июня корабль будет помещен в док для ремонта ходовой части. Затем его оснастят самым современным оборудованием. "Конечно, мы хотели бы, чтобы на нем был гидроплан, конечно, на нем будет вертолет, думаем, что в ближайшие три года появится глубоководный аппарат", — отметил Шойгу."
http://hronika911.ru/detail23313.html
А Сагалевич не может найти 50 млн евро на кругосветку всемирно известного "Келдыша"с двумя ГОА. Что за бред?
Copyright © Balancer 1997..2024
Создано 26.08.2002
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 26.08.2002
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}