-
![[image]](https://www.balancer.ru/cache/sites/ru/sm/smart-algoritm/image/cache/128x128-crop/data-tovar-weight50-500x500.jpg)
Стенд и оборудование для испытаний и измерений 2020
Теги:
 SashaMaks
SashaMaks

SashaMaks>> Там два разных датчика. У меня их вообще много было.
SashaMaks> Вначале площадка была деревянная, по мере роста тяги двигателей я от неё отказался...
SashaMaks> Вначале площадка была деревянная, по мере роста тяги двигателей я от неё отказался...
Прикреплённые файлы:






 инфо
инфо инструменты
инструменты
SashaMaks> Никак, такого просто нет. Зазоры заполняет эпоксидный клей.
Каким образом он может заполнить зазоры между пипкой датчика и платформой которая на него давит? (Я этот вопрос уже второй раз задаю). Или твой датчик в эпоксидке всплывает и упирается пипкой в платформу? Я этого пока понять не могу.
SashaMaks> Вот поэтому при увеличении нагрузки сначала 3 тензорезистора работают у тебя, а потом 4 или какие-нибудь другие 2 или 3, а потом 4.
В любой конструкции на 4-х опорах только так и происходит. Физически невозможно сделать все 4 опоры равнонагруженными, такое только с 3-я опорами возможно (но для весов не годится).
Каким образом он может заполнить зазоры между пипкой датчика и платформой которая на него давит? (Я этот вопрос уже второй раз задаю). Или твой датчик в эпоксидке всплывает и упирается пипкой в платформу? Я этого пока понять не могу.
SashaMaks> Вот поэтому при увеличении нагрузки сначала 3 тензорезистора работают у тебя, а потом 4 или какие-нибудь другие 2 или 3, а потом 4.
В любой конструкции на 4-х опорах только так и происходит. Физически невозможно сделать все 4 опоры равнонагруженными, такое только с 3-я опорами возможно (но для весов не годится).
Mihail66> Каким образом он может заполнить зазоры между пипкой датчика и платформой которая на него давит? (Я этот вопрос уже второй раз задаю)
Зазоры заполняет эпоксидная смола собой. Капаешь капельку на точку опоры на каждом датчике и прижимаешь площадку. Потом смола застывает. Всё. Все точки связаны, никаких зазоров нет.
Зазоры заполняет эпоксидная смола собой. Капаешь капельку на точку опоры на каждом датчике и прижимаешь площадку. Потом смола застывает. Всё. Все точки связаны, никаких зазоров нет.
Xan> Использовать три датчика, три датчика всегда будут на одинаковой высоте == в одной плоскости! ")
Xan> А четвёртый датчик положить отдельно в мягкую коробочку, чтоб его никто не беспокоил.
Блин, Xan если бы ты знал сколько раз мне эта мысль в голову приходила, и по ночам снилась, и я даже эксперименты на этот счет делал, и вполне успешно. Но елы-палы, на нелинейности это никак не отразилось. А так бы уже давно я эту проблему для себя закрыл.
")
Xan> А четвёртый датчик положить отдельно в мягкую коробочку, чтоб его никто не беспокоил.
Блин, Xan если бы ты знал сколько раз мне эта мысль в голову приходила, и по ночам снилась, и я даже эксперименты на этот счет делал, и вполне успешно. Но елы-палы, на нелинейности это никак не отразилось. А так бы уже давно я эту проблему для себя закрыл.
SashaMaks> Зазоры заполняет эпоксидная смола собой. Капаешь капельку на точку опоры на каждом датчике и прижимаешь площадку. Потом смола застывает. Всё. Все точки связаны, никаких зазоров нет.
Ну, бляха, не понимаю я что ты сейчас описываешь.
В какое место ты эту каплю капаешь? Какие точки у тебя получаются связанными?
Я спросил у тебя, ты приклеиваешь платформу к датчикам, ты сказал нет. Значит платформа у тебя может существовать отдельно от датчиков (как и у меня). Сами датчики приклеены эпоксидкой к плите, и датчики эти разные по высоте. Куда лить эпоксидку?
Ну, бляха, не понимаю я что ты сейчас описываешь.
В какое место ты эту каплю капаешь? Какие точки у тебя получаются связанными?
Я спросил у тебя, ты приклеиваешь платформу к датчикам, ты сказал нет. Значит платформа у тебя может существовать отдельно от датчиков (как и у меня). Сами датчики приклеены эпоксидкой к плите, и датчики эти разные по высоте. Куда лить эпоксидку?
Mihail66> И тут нужно либо усилитель размешать рядом с датчиками, либо делать линию связи шестипроводной, и вычитать из сигнала падение напряжения на питающих проводах.
GAM поднял эту проблему со своей нелинейностью, а теперь пропал,

а хочется спросить у него, как в его конструкции устроена линия связи между датчиками и электроникой?
GAM поднял эту проблему со своей нелинейностью, а теперь пропал,
Стенд и оборудование для испытаний и измерений 2020 [GAM#25.05.21 18:36]
Коллеги, помогите разобраться с калибровкой тензодатчика (20кг) с платой от Pinko Как правильно это делать? Кто это делал, можете написать алгоритм? Я делал по следующему алгоритму (когда-то вместе с платой его прислал мне SkyAngel, за что ему большое спасибо): " 1. Присоединить датчик к плате 2. Подключить «USB-кабель» к плате и ПК 3. Подать питание на плату (заморгают светодиоды) 4. Запустить программу 5. В окне программы нажать на кнопку «SMALL THRUST STAND» , слева появится надпись…// Ракетомодельныйа хочется спросить у него, как в его конструкции устроена линия связи между датчиками и электроникой?
Mihail66> В какое место ты эту каплю капаешь?
Вот в это:
Mihail66> пипкой датчика
Mihail66> Какие точки у тебя получаются связанными?
Вот эти:
Mihail66> пипкой датчика
Mihail66> Я спросил у тебя, ты приклеиваешь платформу к датчикам, ты сказал нет.
Не было такого.
Mihail66> Куда лить эпоксидку?
Сюда:
Mihail66> пипкой датчика
Вот в это:
Mihail66> пипкой датчика
Mihail66> Какие точки у тебя получаются связанными?
Вот эти:
Mihail66> пипкой датчика
Mihail66> Я спросил у тебя, ты приклеиваешь платформу к датчикам, ты сказал нет.
Не было такого.
Mihail66> Куда лить эпоксидку?
Сюда:
Mihail66> пипкой датчика
SashaMaks> Вот в это:
SashaMaks> Вот эти:
SashaMaks> Сюда:
Вот теперь понятно.
Значит у тебя получается такой неразборный "пирог с начинкой", в котором как бы не должно возникать никаких паразитных напряжений и перемещений.
А я все гадаю глядя на твои фотографии, на которых пипки датчиков как фурункулы видны невооруженным глазом. Из чего делаю вывод, что платформа у тебя съемная. А оказывается, что конструкция у тебя на самом деле закрытая.
SashaMaks> Вот эти:
SashaMaks> Сюда:
Вот теперь понятно.
Значит у тебя получается такой неразборный "пирог с начинкой", в котором как бы не должно возникать никаких паразитных напряжений и перемещений.
А я все гадаю глядя на твои фотографии, на которых пипки датчиков как фурункулы видны невооруженным глазом. Из чего делаю вывод, что платформа у тебя съемная. А оказывается, что конструкция у тебя на самом деле закрытая.

GAM
NeOnFrOsT
втянувшийся
Mihail66> GAM поднял эту проблему со своей нелинейностью, а теперь пропал,
Да мне нечего сказать умного на эту тему)
Mihail66> а хочется спросить у него, как в его конструкции устроена линия связи между датчиками и электроникой?
4 провода из тензодатчика напрямую подключаются к плате (зажимаются в колодки винтиками), длина проводов где-то 15-20 см.
Да мне нечего сказать умного на эту тему)
Mihail66> а хочется спросить у него, как в его конструкции устроена линия связи между датчиками и электроникой?
4 провода из тензодатчика напрямую подключаются к плате (зажимаются в колодки винтиками), длина проводов где-то 15-20 см.

GAM> 4 провода из тензодатчика напрямую подключаются к плате (зажимаются в колодки винтиками), длина проводов где-то 15-20 см.
Короткие у тебя проводочки. Видимо я ошибаюсь, что длинный кабель виноват в моей нелинейности.
Короткие у тебя проводочки. Видимо я ошибаюсь, что длинный кабель виноват в моей нелинейности.
SashaMaks> Вот эти:
SashaMaks> Сюда:
Mihail66> Значит у тебя получается такой неразборный "пирог с начинкой", в котором как бы не должно возникать никаких паразитных напряжений и перемещений.
А как же быть с температурными деформациями? Если платформа жестко скреплена с точками опоры, то неминуемо возникнут паразитные напряжения.
SashaMaks> Сюда:
Mihail66> Значит у тебя получается такой неразборный "пирог с начинкой", в котором как бы не должно возникать никаких паразитных напряжений и перемещений.
А как же быть с температурными деформациями? Если платформа жестко скреплена с точками опоры, то неминуемо возникнут паразитные напряжения.
Xan> У тебя ступеньки слева и справа не совпадают по высоте.
Xan> И ноль в конце не совпадает с начальным.
Xan> Этому может быть два причины:
Xan> гистерезис, который при повторении опыта дал бы тот же результат;
Это точно нет, гистерезис проявляется по-другому, а именно так, что значения-таки возвращаются в исходное положение, но с некоторой задержкой по времени.
Xan> дрейф нуля (от времени или температуры), когда ступеньки во втором опыте оказались бы на новой высоте.
Это возможно, но дрейф вообще, а если точнее - это типичная случайная ошибка от случайных шумов, которые прошли передискретизацию и превратились из волны с большой частоты в волну с маленькой частотой, но одинаковой амплитуды.
Xan> Вот я два груза поставил-снял, поставил-снял.
Xan> Ноль как был, так и остался.
Xan> И ступеньки на одинаковой высоте.
Xan> На глаз всё ровно.
А сколько времени прошло?
2 минуты или более?
Сколько был груз от максимального номинала датчика?
SashaMaks>> Это "оверсэмплинг".
Xan> Ну, я тоже килосэмплы усреднил (по 256), так что получилось всего 630 точек, а то эксель дуреет!
Xan> Грузы по 2.4 кг, номинал датчика 200 кг.
А понятно, ну попробуй повторить это хотя бы для 50кг и несколько минут подождать и так ещё несколько раз проделать, а потом наложить полученные графики и сравнить их...
А у меня и конкретно для того тензодатчика получилось примерно следующее. Я поднял данные, они сохранены...
Или что даёт тонкая линия при гиперпередискретизации за пределы инструментальной погрешности 12-битного АЦП в плане точности измерения:
1. 1/8000 - что соответствует дополнительному 13 биту разрядности для 12-битного АЦП (но значения плавают при длительном измерении! поэтому это всё туфта);
2. 1/4096 - инструментальная точность на уровне идеального 12-битного АЦП;
3. 1/1500 - реально достигнутая точность измерения в результате той калибровки;
4. 1/1000 - фактически реализуемая точность при условии длительной эксплуатации и многократной перекалибровки (скорее всего будет примерно так, я не заморачивался);
5. 1/100 - действительная точность на стенде при испытаний двигателей с учётом их средней тяги.
В итоге нет смысла делать дополнительные 7 сложений к каждому 8 - а это, на минуточку, 87,5% процессорного времени экономит! Которое я уже направил на работу всяких сервесных алгоритмов и табло...
Xan> И ноль в конце не совпадает с начальным.
Xan> Этому может быть два причины:
Xan> гистерезис, который при повторении опыта дал бы тот же результат;
Это точно нет, гистерезис проявляется по-другому, а именно так, что значения-таки возвращаются в исходное положение, но с некоторой задержкой по времени.
Xan> дрейф нуля (от времени или температуры), когда ступеньки во втором опыте оказались бы на новой высоте.
Это возможно, но дрейф вообще, а если точнее - это типичная случайная ошибка от случайных шумов, которые прошли передискретизацию и превратились из волны с большой частоты в волну с маленькой частотой, но одинаковой амплитуды.
Xan> Вот я два груза поставил-снял, поставил-снял.
Xan> Ноль как был, так и остался.
Xan> И ступеньки на одинаковой высоте.
Xan> На глаз всё ровно.
А сколько времени прошло?
2 минуты или более?
Сколько был груз от максимального номинала датчика?
SashaMaks>> Это "оверсэмплинг".
Xan> Ну, я тоже килосэмплы усреднил (по 256), так что получилось всего 630 точек, а то эксель дуреет!
Xan> Грузы по 2.4 кг, номинал датчика 200 кг.
А понятно, ну попробуй повторить это хотя бы для 50кг и несколько минут подождать и так ещё несколько раз проделать, а потом наложить полученные графики и сравнить их...
А у меня и конкретно для того тензодатчика получилось примерно следующее. Я поднял данные, они сохранены...
Или что даёт тонкая линия при гиперпередискретизации за пределы инструментальной погрешности 12-битного АЦП в плане точности измерения:
1. 1/8000 - что соответствует дополнительному 13 биту разрядности для 12-битного АЦП (но значения плавают при длительном измерении! поэтому это всё туфта);
2. 1/4096 - инструментальная точность на уровне идеального 12-битного АЦП;
3. 1/1500 - реально достигнутая точность измерения в результате той калибровки;
4. 1/1000 - фактически реализуемая точность при условии длительной эксплуатации и многократной перекалибровки (скорее всего будет примерно так, я не заморачивался);
5. 1/100 - действительная точность на стенде при испытаний двигателей с учётом их средней тяги.
В итоге нет смысла делать дополнительные 7 сложений к каждому 8 - а это, на минуточку, 87,5% процессорного времени экономит! Которое я уже направил на работу всяких сервесных алгоритмов и табло...
Mihail66> А как же быть с температурными деформациями?
Вот так, например:
Mihail66> Если платформа жестко скреплена с точками опоры, то неминуемо возникнут паразитные напряжения.
Они не влияют на тензорезисторы, так как очень незначительны и находятся далеко от них, что очевидно уже много раз.
Вот так, например:

Mihail66> Если платформа жестко скреплена с точками опоры, то неминуемо возникнут паразитные напряжения.
Они не влияют на тензорезисторы, так как очень незначительны и находятся далеко от них, что очевидно уже много раз.
Xan>> гистерезис, который при повторении опыта дал бы тот же результат;
SashaMaks> Это точно нет, гистерезис проявляется по-другому, а именно так, что значения-таки возвращаются в исходное положение, но с некоторой задержкой по времени.
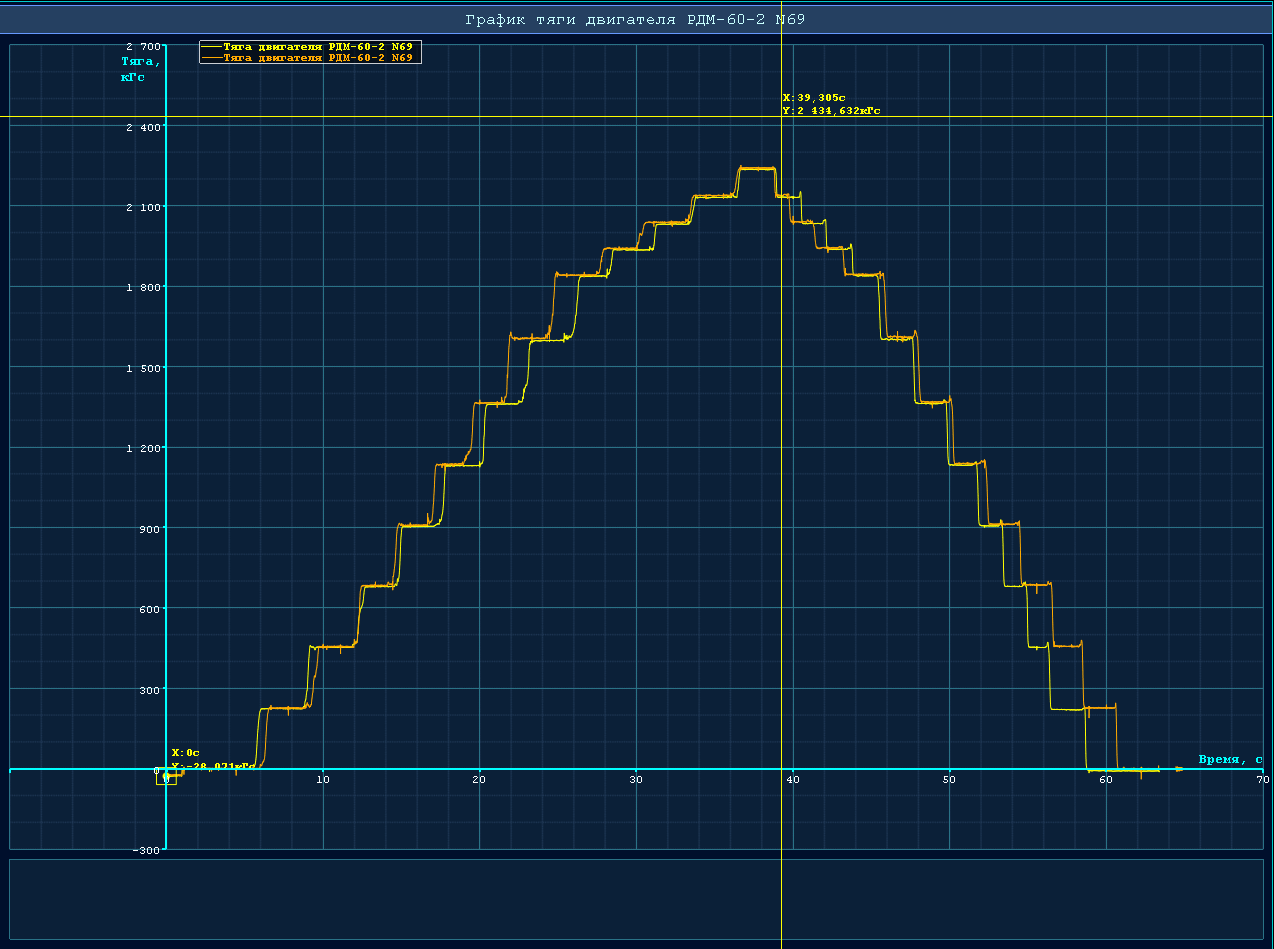
Вот так выглядел механический гистерезис на графике тяги для емкостного датчика Piroman (Дмитрия), где пластины скручивались болтами по краям, что видно по характерному спаду кривой после приложения нагрузки, когда никакой тяги у двигателя уже давно нет:
SashaMaks> Это точно нет, гистерезис проявляется по-другому, а именно так, что значения-таки возвращаются в исходное положение, но с некоторой задержкой по времени.
Вот так выглядел механический гистерезис на графике тяги для емкостного датчика Piroman (Дмитрия), где пластины скручивались болтами по краям, что видно по характерному спаду кривой после приложения нагрузки, когда никакой тяги у двигателя уже давно нет:
Прикреплённые файлы:

Xan>> гистерезис, который при повторении опыта дал бы тот же результат;
SashaMaks> Это точно нет, гистерезис проявляется по-другому, а именно так, что значения-таки возвращаются в исходное положение, но с некоторой задержкой по времени.
Речь о механическом гистерезисе, он никак не привязан ко времени, и выражается в изменении величины сигнала с тензодатчика до нагружения и после снятия нагрузки.
SashaMaks> Это точно нет, гистерезис проявляется по-другому, а именно так, что значения-таки возвращаются в исходное положение, но с некоторой задержкой по времени.
Речь о механическом гистерезисе, он никак не привязан ко времени, и выражается в изменении величины сигнала с тензодатчика до нагружения и после снятия нагрузки.
Mihail66> Речь о механическом гистерезисе
Да я в курсе (Стенд и оборудование для испытаний и измерений 2020 [SashaMaks#04.06.21 08:50]) - график аж от 2011 года...
Да я в курсе (Стенд и оборудование для испытаний и измерений 2020 [SashaMaks#04.06.21 08:50]) - график аж от 2011 года...
SashaMaks> Они не влияют на тензорезисторы, так как очень незначительны и находятся далеко от них, что очевидно уже много раз.
Они влияют на изменение геометрии платформы, которая передается на датчики, т.к. датчики жестко связаны с платформой.
Они влияют на изменение геометрии платформы, которая передается на датчики, т.к. датчики жестко связаны с платформой.
SashaMaks> Да я в курсе (Стенд и оборудование для испытаний и измерений 2020 [SashaMaks#04.06.21 08:50]) - график аж от 2011 года...
Ну там какой-то спад кривой. А на самом деле при гистерезисе весы просто не возвращаются в ноль при снятии гири. И в процессе измерения занижают сигнал при росте нагрузки, и завышают при уменьшении.
Ну там какой-то спад кривой. А на самом деле при гистерезисе весы просто не возвращаются в ноль при снятии гири. И в процессе измерения занижают сигнал при росте нагрузки, и завышают при уменьшении.
Mihail66> Ну там какой-то спад кривой.
Это и есть гистерезис: (Гистерезис — Википедия)
Mihail66> А на самом деле при гистерезисе весы просто не возвращаются в ноль при снятии гири.
Это если в механической системе присутствует сила трения, как у RLAN была калибровка через блок, так как сила трения делится на два вида - сила трения скольжения (она даёт плавное возвращение к правильным значениям) и сила трения покоя - вот она к правильным значениям не возвращается. Это была ошибка при калибровке, когда механическая система при калибровке не соответствовала механической системе при испытании, т.е. двигатель не работал через блок, а калибровочные грузы работали через блок - так вышло завышение показаний для двигателей где-то на 10% по тяги, а для давления это уже вылилось в завышение до 50%, т.е. в 1,5 раза.
Это и есть гистерезис: (Гистерезис — Википедия)

Mihail66> А на самом деле при гистерезисе весы просто не возвращаются в ноль при снятии гири.
Это если в механической системе присутствует сила трения, как у RLAN была калибровка через блок, так как сила трения делится на два вида - сила трения скольжения (она даёт плавное возвращение к правильным значениям) и сила трения покоя - вот она к правильным значениям не возвращается. Это была ошибка при калибровке, когда механическая система при калибровке не соответствовала механической системе при испытании, т.е. двигатель не работал через блок, а калибровочные грузы работали через блок - так вышло завышение показаний для двигателей где-то на 10% по тяги, а для давления это уже вылилось в завышение до 50%, т.е. в 1,5 раза.
Mihail66> Они влияют на изменение геометрии платформы, которая передается на датчики, т.к. датчики жестко связаны с платформой.
Ты и Xan сейчас до...ись до погрешности на уровне 1/4000...1/8000 полученной в условиях гиперпередискретизации при калибровке! Тогда, как в реальных условиях испытаний двигателей погрешность была на уровне 1/100!
НЕ ХОЧЕШЬ - НЕ ДЕЛАЙ ТАК!
Ты и Xan сейчас до...ись до погрешности на уровне 1/4000...1/8000 полученной в условиях гиперпередискретизации при калибровке! Тогда, как в реальных условиях испытаний двигателей погрешность была на уровне 1/100!
НЕ ХОЧЕШЬ - НЕ ДЕЛАЙ ТАК!
Mihail66> Они влияют на изменение геометрии платформы, которая передается на датчики, т.к. датчики жестко связаны с платформой.
На отклонения показаний до и после на самом деле больше влияет пол. Если он из дерева, то его может просто продавливать в точках касания под всей сборкой датчика. В этих точках контакта происходят необратимые пластические деформации - вмятины или отпечатки, а это приводит к изменению угла наклона оси силы от набранных калибровочных грузов при их взвешивании на попа. Поэтому, когда пол был бетонный, то ничего никуда не уползало и всё получалось идеально:
П.С. Но такая версия тебе не нравится
На отклонения показаний до и после на самом деле больше влияет пол. Если он из дерева, то его может просто продавливать в точках касания под всей сборкой датчика. В этих точках контакта происходят необратимые пластические деформации - вмятины или отпечатки, а это приводит к изменению угла наклона оси силы от набранных калибровочных грузов при их взвешивании на попа. Поэтому, когда пол был бетонный, то ничего никуда не уползало и всё получалось идеально:
П.С. Но такая версия тебе не нравится

Прикреплённые файлы:

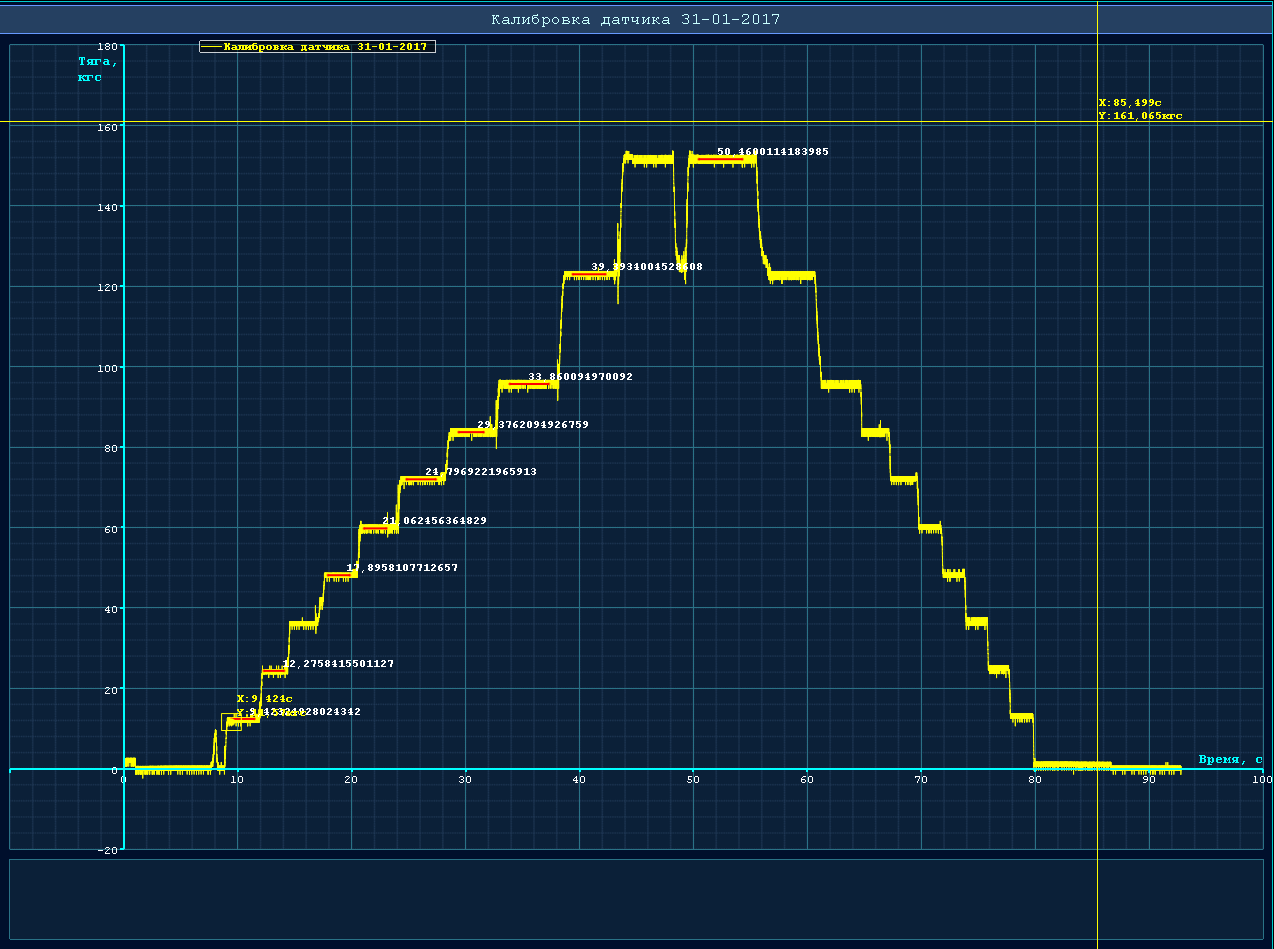

SashaMaks> П.С. Но такая версия тебе не нравится
А вот как выглядит калибровка датчика S-типа на попа собственным весом
А вот как выглядит калибровка датчика S-типа на попа собственным весом
Прикреплённые файлы:

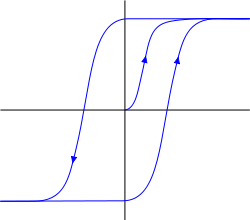
SashaMaks> Это и есть гистерезис: (Гистерезис — Википедия)
SashaMaks> https://upload.wikimedia.org/.../250px-Hysteresiscurve.svg.png
У тебя какое-то неправильное понимание гистерезиса
"Для гистерезиса характерно явление «насыщения», а также неодинаковость траекторий между крайними состояниями (отсюда наличие остроугольной петли на графиках). Не следует путать это понятие с инерционностью поведения систем, которое обозначает монотонное сопротивление системы изменению её состояния."
Гистерезис никак не может возвращаться к первоначальному значению при неизменной величине входного сигнала.
Mihail66>> А на самом деле при гистерезисе весы просто не возвращаются в ноль при снятии гири.
SashaMaks> Это если в механической системе присутствует сила трения....
Так вот как раз в этом и состоит вопрос.
Возможно в твоей системе так же имеются вязкие деформации, к примеру в тех же точках опоры, которые жестко связаны с платформой. Жестко, да не очень.
SashaMaks> https://upload.wikimedia.org/.../250px-Hysteresiscurve.svg.png
У тебя какое-то неправильное понимание гистерезиса
"Для гистерезиса характерно явление «насыщения», а также неодинаковость траекторий между крайними состояниями (отсюда наличие остроугольной петли на графиках). Не следует путать это понятие с инерционностью поведения систем, которое обозначает монотонное сопротивление системы изменению её состояния."
Гистерезис никак не может возвращаться к первоначальному значению при неизменной величине входного сигнала.
Mihail66>> А на самом деле при гистерезисе весы просто не возвращаются в ноль при снятии гири.
SashaMaks> Это если в механической системе присутствует сила трения....
Так вот как раз в этом и состоит вопрос.
Возможно в твоей системе так же имеются вязкие деформации, к примеру в тех же точках опоры, которые жестко связаны с платформой. Жестко, да не очень.
SashaMaks> Ты и Xan сейчас до...ись до погрешности на уровне 1/4000...1/8000 ...
Не! Мы просто теорию вспоминаем.
SashaMaks> НЕ ХОЧЕШЬ - НЕ ДЕЛАЙ ТАК!
Жестко крепить платформу точно не хочу. Как-то это не по сопроматовски.
Не! Мы просто теорию вспоминаем.
SashaMaks> НЕ ХОЧЕШЬ - НЕ ДЕЛАЙ ТАК!
Жестко крепить платформу точно не хочу. Как-то это не по сопроматовски.
SashaMaks> ... Поэтому, когда пол был бетонный, то ничего никуда не уползало и всё получалось идеально:
SashaMaks> П.С. Но такая версия тебе не нравится
Она не подходит к тем явлениям, которые я у себя наблюдаю.
Напомню, у меня нелинейность при малых нагрузках.
SashaMaks> П.С. Но такая версия тебе не нравится
Она не подходит к тем явлениям, которые я у себя наблюдаю.
Напомню, у меня нелинейность при малых нагрузках.
Copyright © Balancer 1997..2024
Создано 01.01.2020
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 01.01.2020
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}