 PopovIgor
PopovIgor
 инфо
инфо инструменты
инструменты slavich77
slavich77
 Ckona
Ckona


 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/w/w/www.afterwork.com.ua/wp-content/uploads/2011/03/128x128-crop/launcher_a2.jpg)
Обыкновенные водяные ракеты из пластиковых бутылок
Теги:

slavich77> to Popov Igor. Игорь, тебе посылку вручить не могут судя по почтовому трекеру (вчера была неудачная попытка вручения)...
Да нет, все проще.
Только вчера пришла на п/о и вчера же оставили в п/я извещение. Сегодня сами обещали доставить.
Да нет, все проще.
Только вчера пришла на п/о и вчера же оставили в п/я извещение. Сегодня сами обещали доставить.



PopovIgor> Да нет, все проще.
PopovIgor> Только вчера пришла на п/о и вчера же оставили в п/я извещение. Сегодня сами обещали доставить.
рашен почта - умом не понять! за каким х.. доставлять сначала извещение, а затем - отправление. два раза бегать.
Точно подмечено:
Почта России - тут вам не DHL!
Почта России - и пусть весь мир подождёт!
PopovIgor> Только вчера пришла на п/о и вчера же оставили в п/я извещение. Сегодня сами обещали доставить.
рашен почта - умом не понять! за каким х.. доставлять сначала извещение, а затем - отправление. два раза бегать.
Точно подмечено:
Почта России - тут вам не DHL!
Почта России - и пусть весь мир подождёт!


PopovIgor> Нарисуй, и все станет ясно.
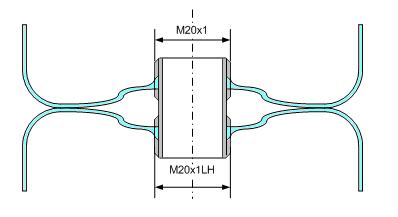
Нарисовал, однако.
Стандартный шаг резьбы М20 - 2,5 мм. Нужна слишком толстая стенка трубки. Поэтому используем резьбу с шагом 1 мм (или меньше).
Нижняя резьба - левая.
Достоинство - большое сечение отверстия, стяжка бутылок происходит без их взаимного врашения, давление в бутылках обжимает резьбу уплотняя ее при этом (как правильно отметил Ckona).
Недостаток - левая резьба, необходимость формировать в дне бутылок буртик и нарезать в нем резьбу.
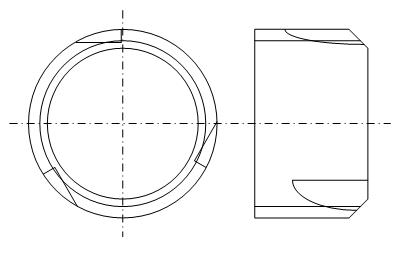
Для нарезки резьбы можно использовать саму трубку, если сточить последние 5 мм резьбы на конус и сделать три продольных надреза вдоль резьбы с острой кромкой.
Форма надрезов для правой резьбы на чертеже. Для левой резьбы надрезы надо зеркально отразить.
Нарисовал, однако.
Стандартный шаг резьбы М20 - 2,5 мм. Нужна слишком толстая стенка трубки. Поэтому используем резьбу с шагом 1 мм (или меньше).
Нижняя резьба - левая.
Достоинство - большое сечение отверстия, стяжка бутылок происходит без их взаимного врашения, давление в бутылках обжимает резьбу уплотняя ее при этом (как правильно отметил Ckona).
Недостаток - левая резьба, необходимость формировать в дне бутылок буртик и нарезать в нем резьбу.
Для нарезки резьбы можно использовать саму трубку, если сточить последние 5 мм резьбы на конус и сделать три продольных надреза вдоль резьбы с острой кромкой.
Форма надрезов для правой резьбы на чертеже. Для левой резьбы надрезы надо зеркально отразить.
Прикреплённые файлы:

Это сообщение редактировалось 08.06.2012 в 11:42
Gematogen> Нарисовал, однако.
Gematogen> Недостаток - левая резьба, необходимость формировать в дне бутылок буртик и нарезать в нем резьбу.
Сделать левую резьбу М20х1- фигня вопрос. Гораздо важнее второе - выделено красным.
Как сделать сей буртик: а) достаточной высоты для достаточного количества ниток, б) точный по диаметру, в) с толстой стенкой для нарезания в нем резьбы??? При 7 атм на резьбовое соединение действует выталкивающее усилие 22 кгс.
Срежет резьбу в пластике и вырвет трубу, если уж крышки вырывает, а там резьба с шагом 3,175 мм..
Gematogen> Недостаток - левая резьба, необходимость формировать в дне бутылок буртик и нарезать в нем резьбу.
Сделать левую резьбу М20х1- фигня вопрос. Гораздо важнее второе - выделено красным.
Как сделать сей буртик: а) достаточной высоты для достаточного количества ниток, б) точный по диаметру, в) с толстой стенкой для нарезания в нем резьбы??? При 7 атм на резьбовое соединение действует выталкивающее усилие 22 кгс.
Срежет резьбу в пластике и вырвет трубу, если уж крышки вырывает, а там резьба с шагом 3,175 мм..
Это сообщение редактировалось 08.06.2012 в 11:57
slavich77> рашен почта - умом не понять! за каким х.. доставлять сначала извещение, а затем - отправление. два раза бегать.
slavich77> Почта России - и пусть весь мир подождёт!
Я бы стал говорить столь категорично. Почтальон доставил извещение, приходи - забирай. Доставлять они не обязаны - объяснил-попросил, благо фиговина маленькая и легкая.
У нас много разной фигни, но это не тот случай )))
slavich77> Почта России - и пусть весь мир подождёт!
Я бы стал говорить столь категорично. Почтальон доставил извещение, приходи - забирай. Доставлять они не обязаны - объяснил-попросил, благо фиговина маленькая и легкая.
У нас много разной фигни, но это не тот случай )))
Gematogen> Достоинство - большое сечение отверстия
Gematogen ! Дорогой ты наш !
Аргумент 1.
На диаметре 20 мм толщина дна у бутылки совершенно недостаточна, чтобы 1)образовать пуклевку для резьбы, 2)удержать усилие от сжатого воздуха, даже если резьба "зацепится".
Аргумент 2.
Уже при диаметре 6 мм в донышке полуторалитровых бутылок проявляется волнистость, вызваная пятью (иногда шестью) выступами, на которые опирается стоящая бутылка.
Я пуклюю и нарезаю резьбу М10х1 - без проблем, М12х1 - только на специально отобранных двухлитровых бутылках с симметричным и толстым "пятном".
Аргумент 3.
Зачем такой большой диаметр ? Для воды, что ли ?
Чтобы выталкивать воду из отверстия 21,5 мм, воздуху достаточно отверстия диаметром 6-7 мм.
Предлагаю тебе сначала самостоятельо выполнить один раз пуклеку с резьбой М10 (на балконе, шуруповертом), а потом уже "идти налево по большому радиусу".
Gematogen ! Дорогой ты наш !
Аргумент 1.
На диаметре 20 мм толщина дна у бутылки совершенно недостаточна, чтобы 1)образовать пуклевку для резьбы, 2)удержать усилие от сжатого воздуха, даже если резьба "зацепится".
Аргумент 2.
Уже при диаметре 6 мм в донышке полуторалитровых бутылок проявляется волнистость, вызваная пятью (иногда шестью) выступами, на которые опирается стоящая бутылка.
Я пуклюю и нарезаю резьбу М10х1 - без проблем, М12х1 - только на специально отобранных двухлитровых бутылках с симметричным и толстым "пятном".
Аргумент 3.
Зачем такой большой диаметр ? Для воды, что ли ?
Чтобы выталкивать воду из отверстия 21,5 мм, воздуху достаточно отверстия диаметром 6-7 мм.
Предлагаю тебе сначала самостоятельо выполнить один раз пуклеку с резьбой М10 (на балконе, шуруповертом), а потом уже "идти налево по большому радиусу".

PopovIgor>> Внутри шарик, который после переворота падая вниз замыкает контакты цепи реле.
Ckona> Шарик замкнет контакты до переворота - как только отработает двигатель и воздух начнет тормозить ракету.
Ограниченность возможностей стимулирует мою мозговую деятельность.
Мечтая о схеме управления раскрытием парашюта от датчика давления посредством сервопривода (три удовольствия на одной плате) придумал вот что:
Инерционный датчик срабатывает не от замыкания контактов, а от их последующего размыкания.
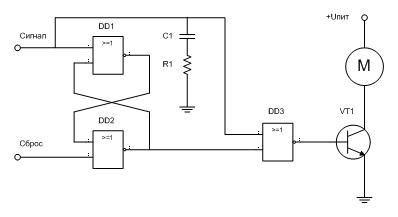
Набросал схемку.
На элементах DD1-DD2 собран RS триггер. Перед стартом он приводится в исходное состояние поданием питания (кнопка) на клемму "сброс". При этом на входе элемента DD3 имеем 0 и 1 - на выходе 0.
При завершении работы двигателя шарик в трубке (например шприц) устремляется вверх под действием примерно четырехкратной перегрузки и замыкая контакты подает напряжение на клемму "сигнал". Триггер переключается в другое устойчивое состояние и на входе элемента DD3 имеем 1 и 0 - на выходе 0.
В апогее шарик находится почти в невесомости. Тут для надежности нужна слабенькая пружинка отталкивающая его от контактов. После размыкания контактов получаем на входе элемента DD3 имеем 0 и 0 - на выходе 1. Включается исполнительный механизм (мотор от китайской игрушки, который наматывает на вал ниточку и выдергивает чеку).
При выбросе парашюта срабатывает концевичек, который отключает мотор и включает какую-нибудь пищалку с мелодией из той-же китайской игрушки как маяк для поиска.
Конденсатор с резистором как мне кажется должны защитить от дребезга контактов.
Так как при разработке схемы применены навыки, полученные (и не обновлявшиеся) в пионерском возрасте, прошу оценить работоспособность схемы тех, кто разбирается в электронике на достаточном уровне.
Особенно меня волнует вопрос надежности (помехозащищенности).
Если схема работоспособна, то нужна всего одна микросхема, две кнопки и шарик в трубке с пружинкой.
Ckona> Шарик замкнет контакты до переворота - как только отработает двигатель и воздух начнет тормозить ракету.
Ограниченность возможностей стимулирует мою мозговую деятельность.
Мечтая о схеме управления раскрытием парашюта от датчика давления посредством сервопривода (три удовольствия на одной плате) придумал вот что:
Инерционный датчик срабатывает не от замыкания контактов, а от их последующего размыкания.
Набросал схемку.
На элементах DD1-DD2 собран RS триггер. Перед стартом он приводится в исходное состояние поданием питания (кнопка) на клемму "сброс". При этом на входе элемента DD3 имеем 0 и 1 - на выходе 0.
При завершении работы двигателя шарик в трубке (например шприц) устремляется вверх под действием примерно четырехкратной перегрузки и замыкая контакты подает напряжение на клемму "сигнал". Триггер переключается в другое устойчивое состояние и на входе элемента DD3 имеем 1 и 0 - на выходе 0.
В апогее шарик находится почти в невесомости. Тут для надежности нужна слабенькая пружинка отталкивающая его от контактов. После размыкания контактов получаем на входе элемента DD3 имеем 0 и 0 - на выходе 1. Включается исполнительный механизм (мотор от китайской игрушки, который наматывает на вал ниточку и выдергивает чеку).
При выбросе парашюта срабатывает концевичек, который отключает мотор и включает какую-нибудь пищалку с мелодией из той-же китайской игрушки как маяк для поиска.
Конденсатор с резистором как мне кажется должны защитить от дребезга контактов.
Так как при разработке схемы применены навыки, полученные (и не обновлявшиеся) в пионерском возрасте, прошу оценить работоспособность схемы тех, кто разбирается в электронике на достаточном уровне.
Особенно меня волнует вопрос надежности (помехозащищенности).
Если схема работоспособна, то нужна всего одна микросхема, две кнопки и шарик в трубке с пружинкой.
Прикреплённые файлы:
Ckona> Предлагаю тебе сначала самостоятельо...
Именно поэтому мои изыскания предварялись вопросами, которые должны были ответить на технологическую возможность изготовления.
Так как в вопросе я не говорил о больших диаметрах, то и сам попал в засаду.
Списываем эту хреновину в архив как технический курьез.
PopovIgor> ...если уж крышки вырывает, а там резьба с шагом 3,175 мм
Крышки слишком податливы (это необходимо для избранного производителями способа уплотнения). Сравнение некорректно.
Но признавая правоту Ckona, не могу не признать и твою правоту.
Предлагаю обсудить схему подключения инерционного датчика выпуска парашюта.")
Игорь, если ты способен припаять кусочек провода к ножке довольно-таки большой микросхемы, которая не боится статики (т.е. без танцев с хлопковым бельем и заземляющим браслетом), то собрать такую схему будет не сложнее, чем вставить батарейки в пульт. А этот этап уже освоен.
Именно поэтому мои изыскания предварялись вопросами, которые должны были ответить на технологическую возможность изготовления.
Так как в вопросе я не говорил о больших диаметрах, то и сам попал в засаду.
Списываем эту хреновину в архив как технический курьез.
PopovIgor> ...если уж крышки вырывает, а там резьба с шагом 3,175 мм
Крышки слишком податливы (это необходимо для избранного производителями способа уплотнения). Сравнение некорректно.
Но признавая правоту Ckona, не могу не признать и твою правоту.
Предлагаю обсудить схему подключения инерционного датчика выпуска парашюта.
Игорь, если ты способен припаять кусочек провода к ножке довольно-таки большой микросхемы, которая не боится статики (т.е. без танцев с хлопковым бельем и заземляющим браслетом), то собрать такую схему будет не сложнее, чем вставить батарейки в пульт. А этот этап уже освоен.
PopovIgor> Я бы стал говорить столь категорично. Почтальон доставил извещение, приходи - забирай.
Я оформлял с доставкой на дом! ))))))
Я оформлял с доставкой на дом! ))))))
Gematogen> Тут для надежности нужна слабенькая пружинка отталкивающая его от контактов.
Я думаю, кусочек поролона будет этой пружинкой.
Я думаю, кусочек поролона будет этой пружинкой.
Gematogen> Инерционный датчик срабатывает не от замыкания контактов, а от их последующего размыкания.
Никакого последующего замыкания не будет !
Твоя ракета пойдет по дуге (случайная невертикальность) и постоянно будет тормозиться об воздух (до апогея, во время апогея, и после него), а шарик будет постоянно прижат к контактам.
Торжественно зачисляю тебя в когорту Отважных Изобретателей Грузика,
бесполезность усилий которых многократно доказывалась на этом Форуме,
где я являюсь единственным невозмутимым опровергастом по этой части.
На правах старого рекомендуна,
настоятельно рекомендую тебе приступить к самостоятельному изготовлению
оптического датчика ориентации на светодиодах.
Никакого последующего замыкания не будет !
Твоя ракета пойдет по дуге (случайная невертикальность) и постоянно будет тормозиться об воздух (до апогея, во время апогея, и после него), а шарик будет постоянно прижат к контактам.
Торжественно зачисляю тебя в когорту Отважных Изобретателей Грузика,
бесполезность усилий которых многократно доказывалась на этом Форуме,
где я являюсь единственным невозмутимым опровергастом по этой части.
На правах старого рекомендуна,
настоятельно рекомендую тебе приступить к самостоятельному изготовлению
оптического датчика ориентации на светодиодах.

bambr-pz
втянувшийся
Gematogen> Списываем эту хреновину в архив как технический курьез.
Не соглашайся с "ними" так сразу. Списывать ничего не надо. Можно надеть на трубу шайбу и поджать ее хомутиком стальным винтовым. Тоже самое можно проделать и в другой бутылке. А полость между бутылками запенить или залить герметиком, предворительно отшкурив поверхность.
Не соглашайся с "ними" так сразу. Списывать ничего не надо. Можно надеть на трубу шайбу и поджать ее хомутиком стальным винтовым. Тоже самое можно проделать и в другой бутылке. А полость между бутылками запенить или залить герметиком, предворительно отшкурив поверхность.

Ckona> настоятельно рекомендую тебе приступить...
Один только этот коммент делает практически неизбежным создание опытного образца.
Признавая твои несомненные заслуги в деле гидроракетостроения и зная твое отношение к инерционным переключателям считаю твое мнение особенно ценным. Тем более, что ты от эмоций быстро переходишь к аргументации.
Однако, пока ты меня не убедил.
Для размыкания достаточно преодолеть силу вызванную ускорением торможения. В апогее она минимальна, по мере падения возрастает примерно до 0,8 g.
Другое дело, что необходимо исключить преждевременное открытие. Я думаю, что до определенных пределов это можно сделать увеличив параметры RC цепочки.
Я не изобрел инерциальный датчик. Просто пытаюсь учесть параметры его движения. У тебя наверняка на телевизоре или на видео есть крышечка, которая закрывается при нажатии, а потом открывается при таком же нажатии. И эта прямо противоположная реакция на одинаковое воздействие никого не удивляет.
Мы имеем знакопеременную силу. Во время работы двигателя она направлена против движения, затем при торможении резко меняет направление на противоположное, и плавно убывает до апогея. Затем опять начинает нарастать. Оптимальный момент включения - минимум силы. Для гарантированного размыкания отделяем шарик пружиной чуть раньше, А это самое "чуть раньше" компенсируем электронной задержкой.
В дальнейшем предлагаю отдельно обсуждать поведение шарика и работоспособность электронной части по алгоритму сброс - замыкание - размыкание - срабатывание механизма.
Один только этот коммент делает практически неизбежным создание опытного образца.
Признавая твои несомненные заслуги в деле гидроракетостроения и зная твое отношение к инерционным переключателям считаю твое мнение особенно ценным. Тем более, что ты от эмоций быстро переходишь к аргументации.
Однако, пока ты меня не убедил.
Для размыкания достаточно преодолеть силу вызванную ускорением торможения. В апогее она минимальна, по мере падения возрастает примерно до 0,8 g.
Другое дело, что необходимо исключить преждевременное открытие. Я думаю, что до определенных пределов это можно сделать увеличив параметры RC цепочки.
Я не изобрел инерциальный датчик. Просто пытаюсь учесть параметры его движения. У тебя наверняка на телевизоре или на видео есть крышечка, которая закрывается при нажатии, а потом открывается при таком же нажатии. И эта прямо противоположная реакция на одинаковое воздействие никого не удивляет.
Мы имеем знакопеременную силу. Во время работы двигателя она направлена против движения, затем при торможении резко меняет направление на противоположное, и плавно убывает до апогея. Затем опять начинает нарастать. Оптимальный момент включения - минимум силы. Для гарантированного размыкания отделяем шарик пружиной чуть раньше, А это самое "чуть раньше" компенсируем электронной задержкой.
В дальнейшем предлагаю отдельно обсуждать поведение шарика и работоспособность электронной части по алгоритму сброс - замыкание - размыкание - срабатывание механизма.
bambr-pz> Можно надеть на трубу...
К сожалению, это приводит к резкому снижению сечения отверстия и приближает нас к прекрасно работающей в настоящее время системе без геморроя с левой резьбой и резьбой непосредственно в бутылке.
К сожалению, это приводит к резкому снижению сечения отверстия и приближает нас к прекрасно работающей в настоящее время системе без геморроя с левой резьбой и резьбой непосредственно в бутылке.
bambr-pz
втянувшийся
bambr-pz>> Можно надеть на трубу...
Gematogen> К сожалению, это приводит к резкому снижению сечения отверстия...
Не понял?!?! Объясни.
Я предлагаю в твоем варианте не резать резьбу на бутылке, а на трубу Ф20 надеть шайбу (металл, пластмас.....) и поджать шайбу металлическим хомутом (отверткой с длинным жалом это получится). А с другой стороны (во второй бутылке) на трубу надеть тоже шайбу и тоже поджать ее металлическим хомутом. Хомуты стянут бутылки между собой и закрепят их в стянутом положении. Никакого снижения диаметра не происходит. Труба то пластиковая?
Gematogen> К сожалению, это приводит к резкому снижению сечения отверстия...
Не понял?!?! Объясни.
Я предлагаю в твоем варианте не резать резьбу на бутылке, а на трубу Ф20 надеть шайбу (металл, пластмас.....) и поджать шайбу металлическим хомутом (отверткой с длинным жалом это получится). А с другой стороны (во второй бутылке) на трубу надеть тоже шайбу и тоже поджать ее металлическим хомутом. Хомуты стянут бутылки между собой и закрепят их в стянутом положении. Никакого снижения диаметра не происходит. Труба то пластиковая?
Gematogen> Мы имеем знакопеременную силу.
Я рад, что ты воспринял мои шутки, как шутки.
Твой подход основан на закономерном (заранее известном) поведении ускорения, от которого грузик дергается туда-сюда.
Однако, в реальном полете, ускорение меняется под действием случайных факторов.
Даже четко отлаженная на какие-то определенные параметры полета, система не сработает при их изменении.
Постараюсь со временем их перечислить. Это поможет новому поколению Отважных Изобретателей Грузика.
Кстати, последние три слова - ключевые для поиска. Посмотри-почитай. Изобреталось не менее десяти раз.
Событие, вызывающее срабатывание системы спасения, должно быть достоверным.
Например, изменение ориентации ракеты относительно неба.
Я рад, что ты воспринял мои шутки, как шутки.
Твой подход основан на закономерном (заранее известном) поведении ускорения, от которого грузик дергается туда-сюда.
Однако, в реальном полете, ускорение меняется под действием случайных факторов.
Даже четко отлаженная на какие-то определенные параметры полета, система не сработает при их изменении.
Постараюсь со временем их перечислить. Это поможет новому поколению Отважных Изобретателей Грузика.
Кстати, последние три слова - ключевые для поиска. Посмотри-почитай. Изобреталось не менее десяти раз.
Событие, вызывающее срабатывание системы спасения, должно быть достоверным.
Например, изменение ориентации ракеты относительно неба.
bambr-pz
втянувшийся
Gematogen> Предлагаю обсудить схему подключения инерционного датчика выпуска парашюта.
Схему щас немного дорисую и выложу. Вобщем все правильно, только сервоприводома управлять не так просто. Там питание приходит на него отдельно, а полярность и длительность управляющего импульса поворачивает вал на определенный угол.
Схему щас немного дорисую и выложу. Вобщем все правильно, только сервоприводома управлять не так просто. Там питание приходит на него отдельно, а полярность и длительность управляющего импульса поворачивает вал на определенный угол.
slavich77>
Пружина от пластмассового коннектора отлично сюда подходит, усилия достаточно. Еще раз спасибо!
А сзади на спинке стула, беленький, правда, плохо видно, - цэ парашют
Пружина от пластмассового коннектора отлично сюда подходит, усилия достаточно. Еще раз спасибо!
А сзади на спинке стула, беленький, правда, плохо видно, - цэ парашют
Прикреплённые файлы:
Это сообщение редактировалось 08.06.2012 в 17:18
Gematogen> Для размыкания достаточно преодолеть силу вызванную ускорением торможения. В апогее она минимальна, по мере падения возрастает примерно до 0,8 g.
До 1 g - при установившейся скорости свободного падения. Если, конечно, высоты хватит, чтобы ее набрать.
Перспективный -Gogi - по давлению - хоть днем пускай, хоть ночью.
До 1 g - при установившейся скорости свободного падения. Если, конечно, высоты хватит, чтобы ее набрать.
Перспективный -Gogi - по давлению - хоть днем пускай, хоть ночью.
Это сообщение редактировалось 08.06.2012 в 17:15
bambr-pz> Я предлагаю в твоем варианте не резать резьбу на бутылке, а на трубу Ф20 надеть шайбу (металл, пластмас.....) и поджать шайбу металлическим хомутом (отверткой с длинным жалом это получится).
В этом случае мы работаем внутри бутылки через горло. Все, что мы туда будем засовывать должно вписываться в окружность диаметром 21 мм.
Нам при сжатии нужно обеспечить осевое усилие. Какой хомут ты предполагаешь использовать?
В этом случае мы работаем внутри бутылки через горло. Все, что мы туда будем засовывать должно вписываться в окружность диаметром 21 мм.
Нам при сжатии нужно обеспечить осевое усилие. Какой хомут ты предполагаешь использовать?
Ckona> Однако, в реальном полете, ускорение меняется под действием случайных факторов.
Случайно перестала течь вода? Уплотнился воздух?")
То о чем ты говоришь называется флуктуации. В нашем случае они не имеют принципиального значения.
Перегрузки:
- старт - 0,01с -10g
- конец воды - 0,27с -30g
- перемена знака ускорения - 0,41с 0g
- максимальное торможение - 0,59с +4,8g
- конец воздуха - 0,64с +4,6g
- апогей 3,32с +0g - ракета опрокидывается.
- перед ударом об землю 7,85с +0,9g
Перегрузки даны относительно направления движения ракеты с точки зрения шарика.
Для аварийного наклонного пуска (интересно, как при этом сработает датчик горизонта?) будет иным характер перегрузок при торможении в апогее перегрузка будет больше (так как скорость будет больше 0). Это все нужно считать. В результате или настроим систему, или получим допустимые условия стабильной работы.
А по электронной части кто-нибудь выскажется?
Случайно перестала течь вода? Уплотнился воздух?
То о чем ты говоришь называется флуктуации. В нашем случае они не имеют принципиального значения.
Перегрузки:
- старт - 0,01с -10g
- конец воды - 0,27с -30g
- перемена знака ускорения - 0,41с 0g
- максимальное торможение - 0,59с +4,8g
- конец воздуха - 0,64с +4,6g
- апогей 3,32с +0g - ракета опрокидывается.
- перед ударом об землю 7,85с +0,9g
Перегрузки даны относительно направления движения ракеты с точки зрения шарика.
Для аварийного наклонного пуска (интересно, как при этом сработает датчик горизонта?) будет иным характер перегрузок при торможении в апогее перегрузка будет больше (так как скорость будет больше 0). Это все нужно считать. В результате или настроим систему, или получим допустимые условия стабильной работы.
А по электронной части кто-нибудь выскажется?
Gematogen>> Для размыкания достаточно преодолеть силу вызванную ускорением торможения. В апогее она минимальна, по мере падения возрастает примерно до 0,8 g.
PopovIgor> До 1 g - при установившейся скорости свободного падения. Если, конечно, высоты хватит, чтобы ее набрать.
Ну мы же не из космоса падаем... Асимптотическое приближение.
PopovIgor> Перспективный -Gogi - по давлению - хоть днем пускай, хоть ночью.
Дык это надо дождаться... Ему надо добавить определение апогея и генерацию управляющих импульсов на серву. В принципе, если у МК есть резерв, то задача решается вообще только перепрошивкой. Но это лучше спросить у самого -Gogi -.
Время замкнутого состояния контактов не менее 2,5 с. Это значит, что мы можем делать временнУю задержку не менее секунды без потери надежности. Т.е. датчик срабатывает раньше апогея, а механизм включает с задержкой.
PopovIgor> До 1 g - при установившейся скорости свободного падения. Если, конечно, высоты хватит, чтобы ее набрать.
Ну мы же не из космоса падаем... Асимптотическое приближение.
PopovIgor> Перспективный -Gogi - по давлению - хоть днем пускай, хоть ночью.
Дык это надо дождаться... Ему надо добавить определение апогея и генерацию управляющих импульсов на серву. В принципе, если у МК есть резерв, то задача решается вообще только перепрошивкой. Но это лучше спросить у самого -Gogi -.
Время замкнутого состояния контактов не менее 2,5 с. Это значит, что мы можем делать временнУю задержку не менее секунды без потери надежности. Т.е. датчик срабатывает раньше апогея, а механизм включает с задержкой.
Это сообщение редактировалось 08.06.2012 в 17:52

mansy
втянувшийся
Gematogen> Набросал схемку.
Gematogen> На элементах DD1-DD2 собран RS триггер. Перед стартом он приводится в исходное состояние поданием питания (кнопка) на клемму "сброс". При этом на входе элемента DD3 имеем 0 и 1 - на выходе 0.
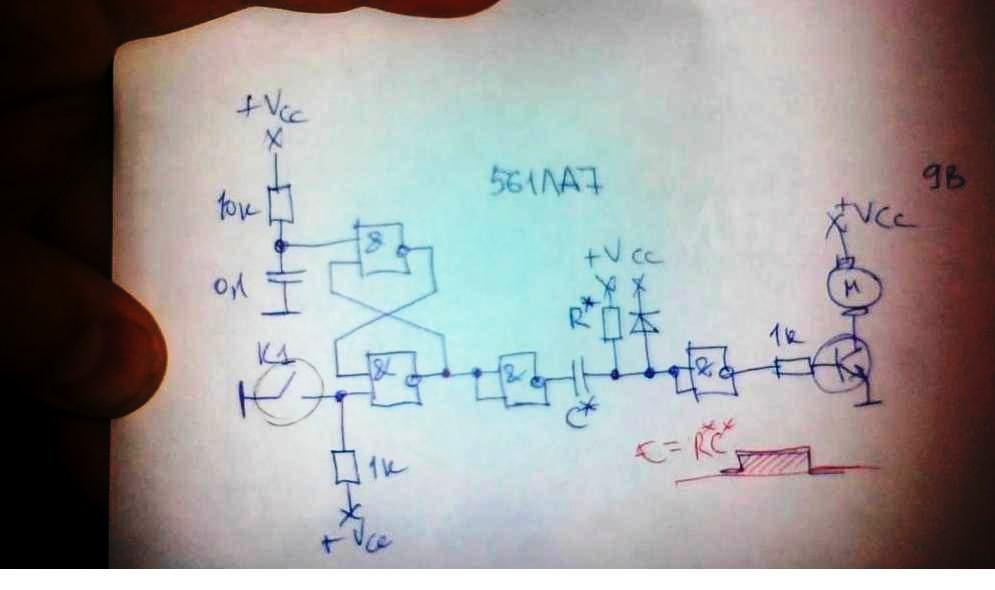
Прилагаю (в качестве разминки нацарапал) вот такую схему. К1 замыкается, триггер опрокидывается и мотор крутится в течение времени, определяемом RC-цепочкой. Передёргиванием питания возврат в исходную позицию. Всё должно заработать. Единственное, ...с шариком, есть сомнения, как и у авторитетов форума.
Gematogen> На элементах DD1-DD2 собран RS триггер. Перед стартом он приводится в исходное состояние поданием питания (кнопка) на клемму "сброс". При этом на входе элемента DD3 имеем 0 и 1 - на выходе 0.
Прилагаю (в качестве разминки нацарапал) вот такую схему. К1 замыкается, триггер опрокидывается и мотор крутится в течение времени, определяемом RC-цепочкой. Передёргиванием питания возврат в исходную позицию. Всё должно заработать. Единственное, ...с шариком, есть сомнения, как и у авторитетов форума.
Прикреплённые файлы:
Это сообщение редактировалось 08.06.2012 в 18:10
Реклама Google — средство выживания форумов :)
mansy> К1 замыкается, триггер опрокидывается и мотор крутится в течение времени, определяемом RC-цепочкой. Единственное, ...с шариком, есть сомнения, как и у авторитетов форума.
С шариком сомнений нет - по замыканию настраивать нельзя. Разорвет в хлам и парашют и ракету.
Настраивать надо на размыкание после замыкания.
С шариком сомнений нет - по замыканию настраивать нельзя. Разорвет в хлам и парашют и ракету.
Настраивать надо на размыкание после замыкания.
Copyright © Balancer 1997..2024
Создано 24.04.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 24.04.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
