 lincoln
lincoln
 инфо
инфо инструменты
инструменты
 RLAN
RLAN









 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/it/itmages/static/storage1/i/15/0120/128x128-crop/h_1421762386_4806206_89a9f12d95.jpg)
GPS маяки, радиомаяки и другие системы поиска ракет.
Теги:

GOGI> А чем шьете и какой программой пользуйтесь?
В понедельник на работе узнаю.
В понедельник на работе узнаю.


lincoln> Наконец-то пришла р\с.
Вчера вечером на форуме проводились работы, фото не цеплялись.
Baofeng UV-5R
Вчера вечером на форуме проводились работы, фото не цеплялись.
Baofeng UV-5R
Прикреплённые файлы:
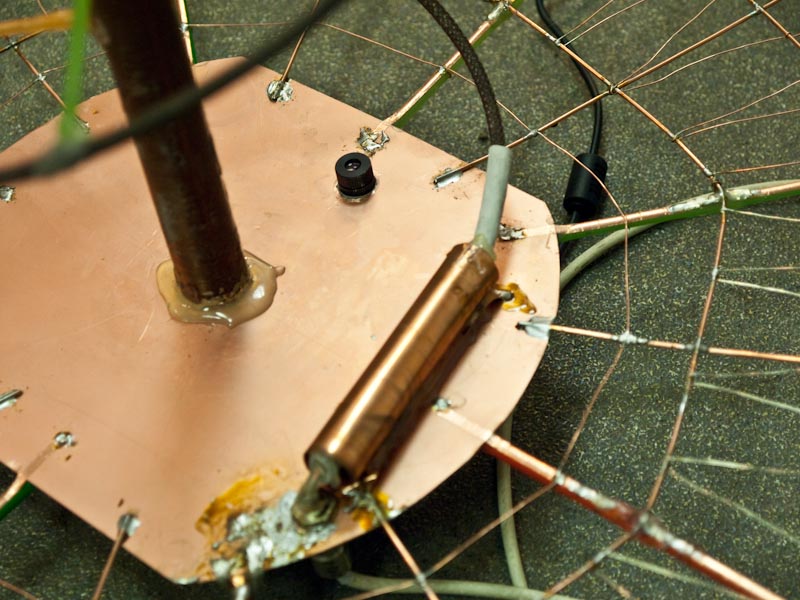
Закончил антенну. Доволен, как слон.
КСВ 1,2. Кому то это все равно. А я горд")
Вспоминается анекдот про скрипку Страдивари и маузер Дзержинского. Аналогично.
Могу сказать по опыту настроек нескольких (порядка десятка) антенн, что выполненные по правильному научному расчету устройства согласования у меня не работали. Начал с полоскового трансформатора, затем коаксиальный, КСВ не менее 5. Пытался выполнить конструкцию аналогичную настроенным антеннам, с учетом изменения диапазона. Тот же результат. Пошел по пути подбора длины и диаметра коаксиального стакана, получилось, но с расчетными данными не бъет. Без КСВ метра даже не знаю, как это можно сделать.
980г в сборе, выдерживает падение с высоты кривых рук
Несоосность видеокамеры и бона антенны (максимум диаграммы направленности наверняка там же) не более 1 градуса, глядя в дырочку бона и на экран
Расчетное усиление 15dB, при переходе с круговой на линейную поляризацию - -3dB, итого 12dB, в 16 раз.
КСВ 1,2. Кому то это все равно. А я горд
Вспоминается анекдот про скрипку Страдивари и маузер Дзержинского. Аналогично.
Могу сказать по опыту настроек нескольких (порядка десятка) антенн, что выполненные по правильному научному расчету устройства согласования у меня не работали. Начал с полоскового трансформатора, затем коаксиальный, КСВ не менее 5. Пытался выполнить конструкцию аналогичную настроенным антеннам, с учетом изменения диапазона. Тот же результат. Пошел по пути подбора длины и диаметра коаксиального стакана, получилось, но с расчетными данными не бъет. Без КСВ метра даже не знаю, как это можно сделать.
980г в сборе, выдерживает падение с высоты кривых рук
Несоосность видеокамеры и бона антенны (максимум диаграммы направленности наверняка там же) не более 1 градуса, глядя в дырочку бона и на экран
Расчетное усиление 15dB, при переходе с круговой на линейную поляризацию - -3dB, итого 12dB, в 16 раз.
Прикреплённые файлы:


RLAN> Закончил антенну. Доволен, как слон.
RLAN> КСВ 1,2. Кому то это все равно. А я горд
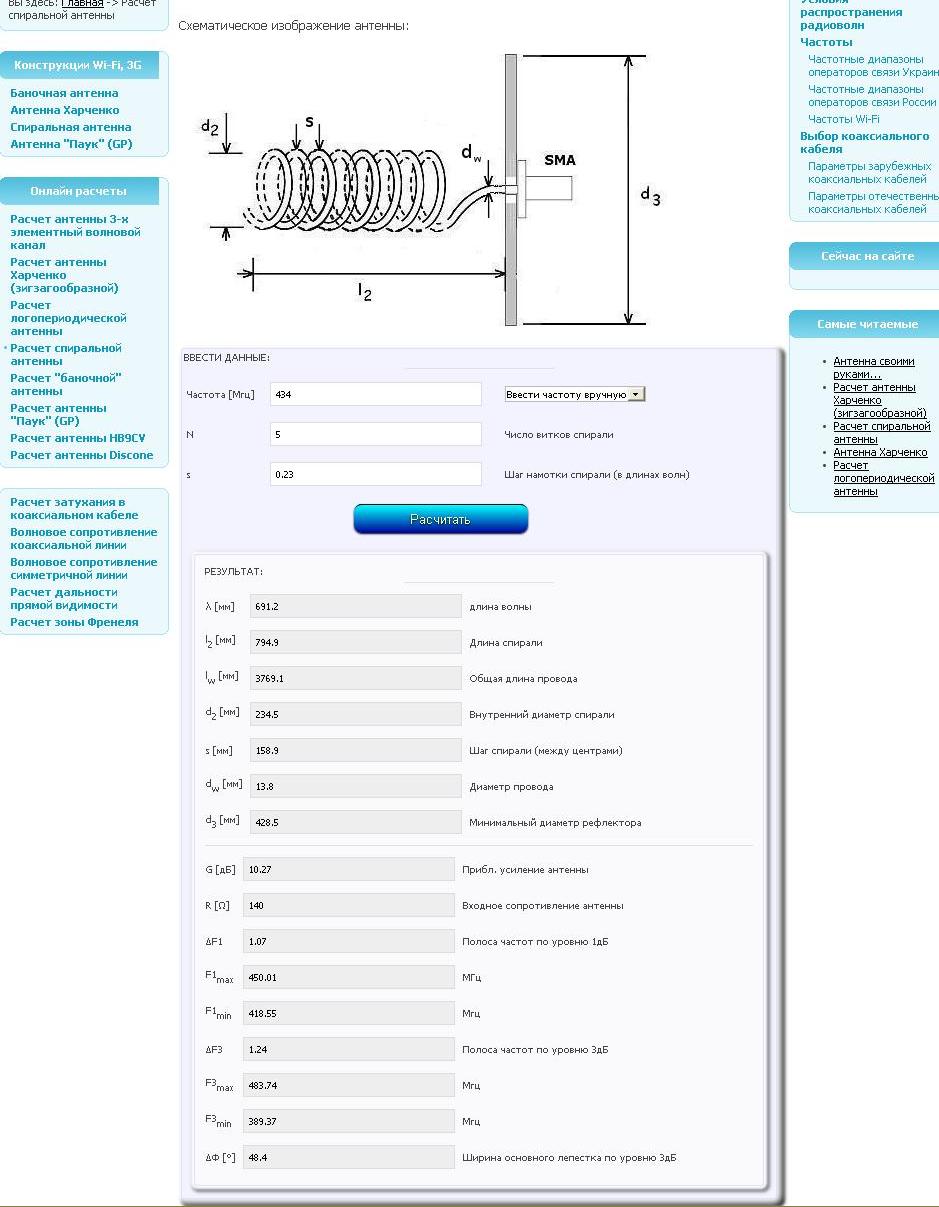
Красиво получилось, особенно результаты. Размеры на эти похожи? Это отсюда Онлайн расчет спиральной антенны - Aerial Сопротивление коаксиального трансформатора можно посчитать с помощью "кабельного" калькулятора cable.zip, интересно какое оно у тебя получилось?
RLAN> КСВ 1,2. Кому то это все равно. А я горд
Красиво получилось, особенно результаты. Размеры на эти похожи? Это отсюда Онлайн расчет спиральной антенны - Aerial Сопротивление коаксиального трансформатора можно посчитать с помощью "кабельного" калькулятора cable.zip, интересно какое оно у тебя получилось?

Это сообщение редактировалось 10.02.2013 в 21:20
Ура!
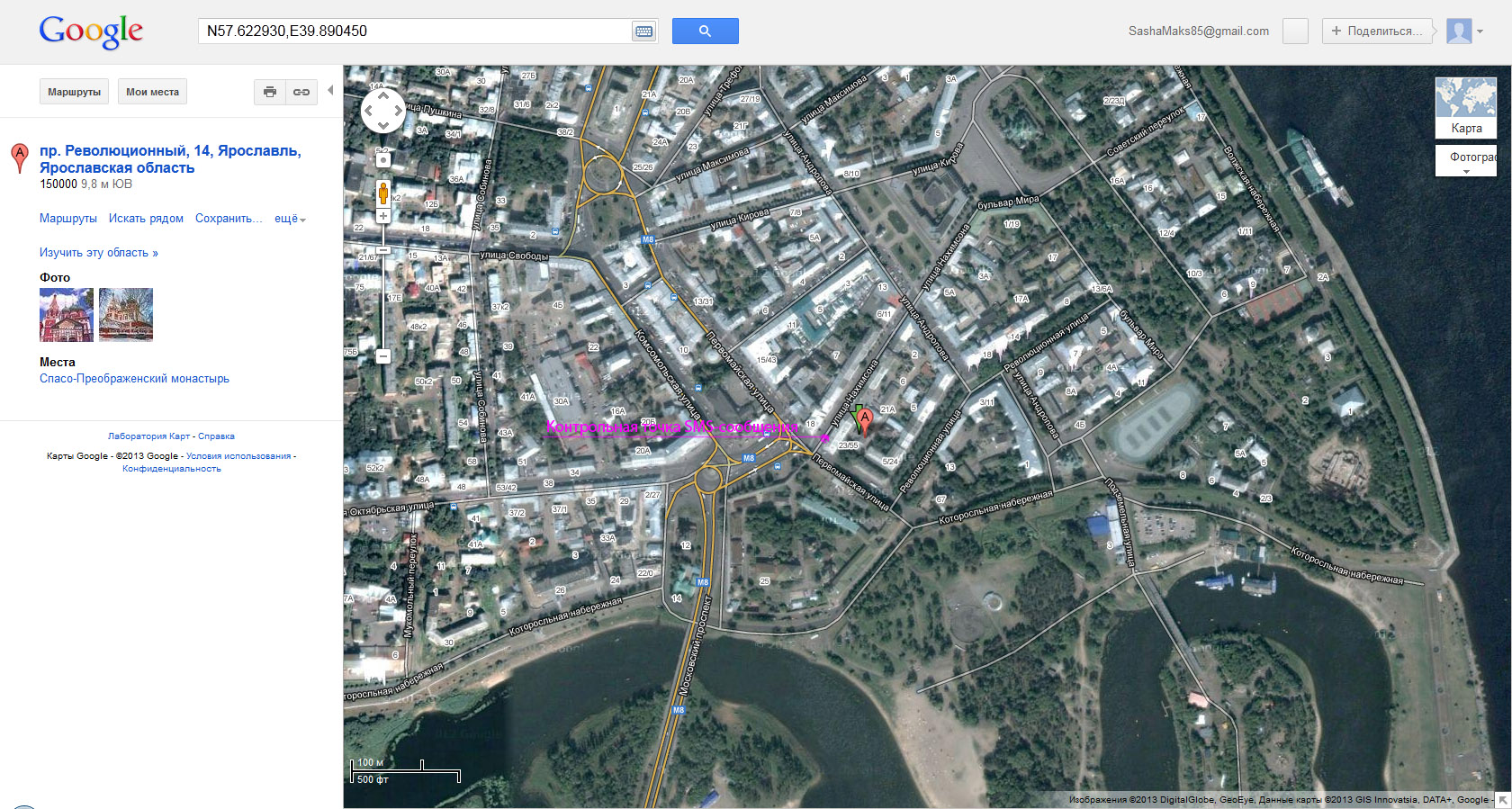
Наконец-то я его купил! Нашёл контору, которая торгует gps-трекерами и прочим спутниковым оборудованием в Ярославле. Уже и обкатать успел новую покупку на себе. Пробежка на 2км по набережной Волги удалась. Трекер нашёл спутник (самая верхняя точка на карте) и дальше стал слать через каждые 2 мин по gsm координаты. Опрос gps координат настроил на 10сек. До стрелки (где Которосль в Волгу впадает) держал трекер в руке открыто. Точность полученных координат очень высокая получилась где-то 2-4м. Потом засунул трекер в карман куртки и закрыл его там. Точность несколько снизилась до 10-20м, но, возможно, это из-за близкого расположения строений и деревьев на оставшемся маршруте…
Наконец-то я его купил! Нашёл контору, которая торгует gps-трекерами и прочим спутниковым оборудованием в Ярославле. Уже и обкатать успел новую покупку на себе. Пробежка на 2км по набережной Волги удалась. Трекер нашёл спутник (самая верхняя точка на карте) и дальше стал слать через каждые 2 мин по gsm координаты. Опрос gps координат настроил на 10сек. До стрелки (где Которосль в Волгу впадает) держал трекер в руке открыто. Точность полученных координат очень высокая получилась где-то 2-4м. Потом засунул трекер в карман куртки и закрыл его там. Точность несколько снизилась до 10-20м, но, возможно, это из-за близкого расположения строений и деревьев на оставшемся маршруте…

Карта:
Прикреплённые файлы:
Трекер:
Прикреплённые файлы:
Контрольная точка по SMS сообщению и полученным координатам через SMS на сотовый телефон:
Прикреплённые файлы:
SashaMaks> Потом засунул трекер в карман куртки и закрыл его там. Точность несколько снизилась до 10-20м,
Проведи ему полные ходовые испытания: за городом, положи на землю (иногда в таких условиях трекеры теряют связь) в полях, в кустарнике, там где отсутствует 3G.
Проведи ему полные ходовые испытания: за городом, положи на землю (иногда в таких условиях трекеры теряют связь) в полях, в кустарнике, там где отсутствует 3G.
RLAN> Закончил антенну.
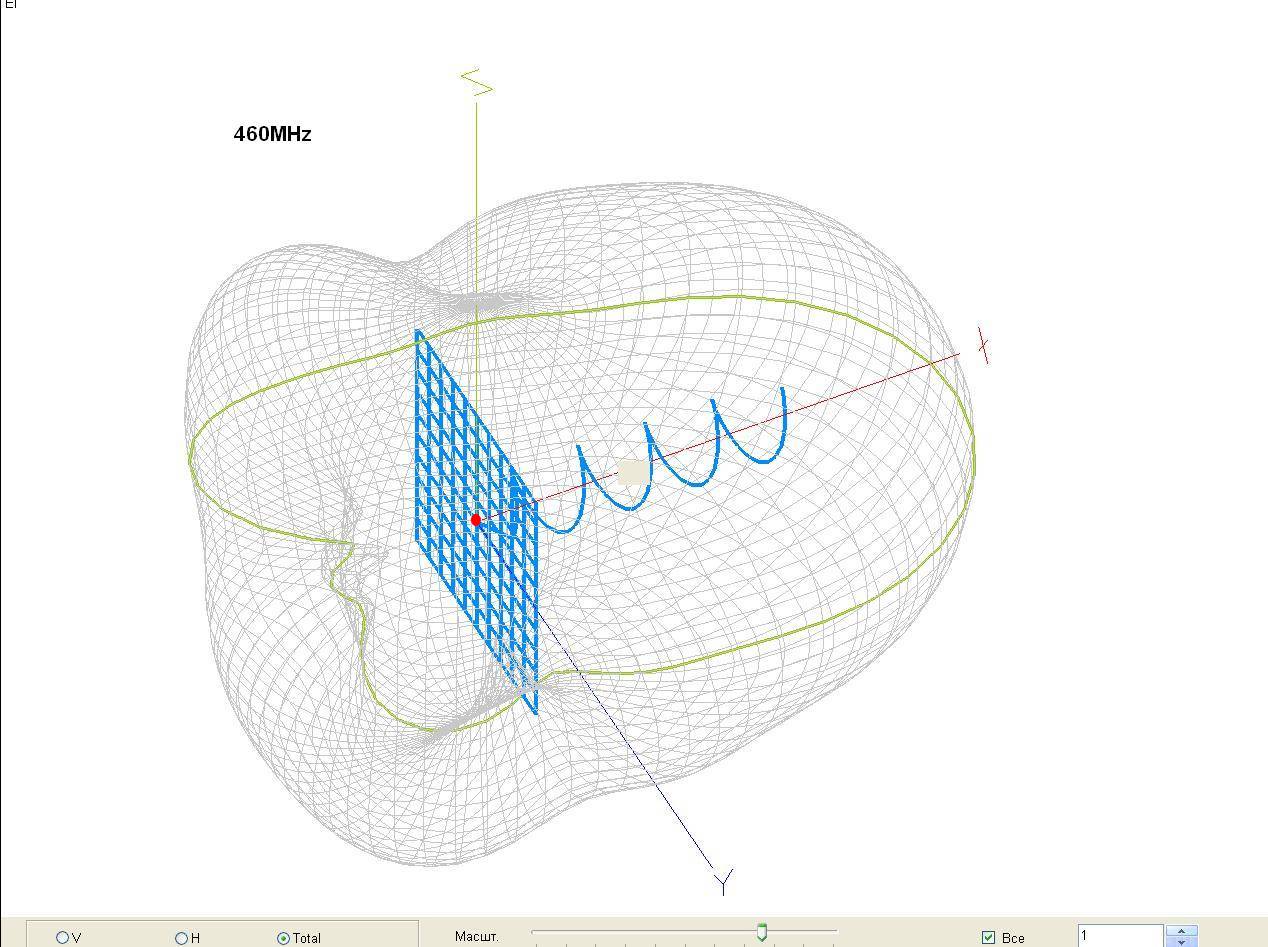
Кстати, модель для той спиральки, размеры на которую ты давал, я всё таки решил достроить. Вот что из неё получилось для частот 434 и 460, без трансформатора согласования. Интересно сравнить с моделью новой антенны.
Кстати, модель для той спиральки, размеры на которую ты давал, я всё таки решил достроить. Вот что из неё получилось для частот 434 и 460, без трансформатора согласования. Интересно сравнить с моделью новой антенны.

RLAN>> Закончил антенну.
MartKot> Кстати, модель для той спиральки, размеры на которую ты давал, я всё таки решил достроить. Вот что из неё получилось для частот 434 и 460, без трансформатора согласования. Интересно сравнить с моделью новой антенны.
Спасибо за участие.
Делал антенну немного по другой модели. Было несколько вариантов, и пару книжек. вот этот расчетчик мне показался лучшим.
Кроме того, во всех книжках центральный ввод фидера не рекомендуют, несколько отрицательных моментов, все не помню, помню снижение усиления. Предлагают по образующей спирали.
Всего у меня 5,5 витков после согласующего трансформатора.
Кроме того эмпирическим путем я понял, всякие эмуляторы и матмодели хороши только для первичной оценки. Делать по ним готовое устройство - потеря времени и заведомо не лучшие показатели.
Хотя никого в свою веру не зову
MartKot> Кстати, модель для той спиральки, размеры на которую ты давал, я всё таки решил достроить. Вот что из неё получилось для частот 434 и 460, без трансформатора согласования. Интересно сравнить с моделью новой антенны.
Спасибо за участие.
Делал антенну немного по другой модели. Было несколько вариантов, и пару книжек. вот этот расчетчик мне показался лучшим.
Кроме того, во всех книжках центральный ввод фидера не рекомендуют, несколько отрицательных моментов, все не помню, помню снижение усиления. Предлагают по образующей спирали.
Всего у меня 5,5 витков после согласующего трансформатора.
Кроме того эмпирическим путем я понял, всякие эмуляторы и матмодели хороши только для первичной оценки. Делать по ним готовое устройство - потеря времени и заведомо не лучшие показатели.
Хотя никого в свою веру не зову
Прикреплённые файлы:
Официально прошу помощи у грамотных участников форума по реализации алгоритма управления платформой по данным GPS.
Математику выкладывал.
http://www.balancer.ru/forum/.../attachment.php?item=317268&download=2
В начале координат - платформа наблюдения. Нулевая точка - точка старта, на которую выставляется платформа в нулевом положении (концевики замкнуты).
По данным GPSа и Глонасса (беру такие приемники), а в аварийном режиме - только по данным высотомера с фиксацией азимута, должны быть выданы углы поворота платформы.
Упрощает ситуацию то, что углы могут быть дискретизированы до 50 значений по углу места и ± 100 по азимуту. В крайнем случае - еще вдвое грубее. То есть вычисление арккосинуса и арктангенса можно заменить таблицей Брадиса
Но вычислять надо не реже раз в секунду. Данные десятичные (хотя даташит по модулям пока внимательно не читал, SIM68R)преобразование, вычитание исходной координаты, и пр - одним словом, вопрос номер один - на чем это делать. Мой коллега, разрабатывающий контроллеры привык работать с PICами, просит поменьше тригонометрии.
у грамотных участников форума по реализации алгоритма управления платформой по данным GPS.Математику выкладывал.
http://www.balancer.ru/forum/.../attachment.php?item=317268&download=2
В начале координат - платформа наблюдения. Нулевая точка - точка старта, на которую выставляется платформа в нулевом положении (концевики замкнуты).
По данным GPSа и Глонасса (беру такие приемники), а в аварийном режиме - только по данным высотомера с фиксацией азимута, должны быть выданы углы поворота платформы.
Упрощает ситуацию то, что углы могут быть дискретизированы до 50 значений по углу места и ± 100 по азимуту. В крайнем случае - еще вдвое грубее. То есть вычисление арккосинуса и арктангенса можно заменить таблицей Брадиса
Но вычислять надо не реже раз в секунду. Данные десятичные (хотя даташит по модулям пока внимательно не читал, SIM68R)преобразование, вычитание исходной координаты, и пр - одним словом, вопрос номер один - на чем это делать. Мой коллега, разрабатывающий контроллеры привык работать с PICами, просит поменьше тригонометрии.

А в чем вообще проблема-то? Аппроксимируете минуты метрами, находите координаты ракеты в декартовых координатах и переводите в сферические полярные. Делать на чем угодно, там не так много тригонометрии, чтобы контроллер с нужной точностью не посчитал в реальном времени. Только писать надо на Си или другом ЯВУ.
GOGI> А в чем вообще проблема-то? Аппроксимируете минуты метрами, находите координаты ракеты в декартовых координатах и переводите в сферические полярные. Делать на чем угодно, там не так много тригонометрии, чтобы контроллер с нужной точностью не посчитал в реальном времени. Только писать надо на Си или другом ЯВУ.
Глобально это все понятно.
Блок схему нарисую
Но лично мне неясно, какого уровня контроллер справится с этой математикой.
Глобально это все понятно.
Блок схему нарисую
Но лично мне неясно, какого уровня контроллер справится с этой математикой.

RLAN> Но лично мне неясно, какого уровня контроллер справится с этой математикой.
Любого.
Любого.
RLAN> Но лично мне неясно, какого уровня контроллер справится с этой математикой.
Ну, если выражаться в АВРках, то меги8-16 вполне достаточно. Парсинг строк, кстати, не намного менее ресурсоемкая задача.
P.S.-если дашь выход своего GPSа, то за неделю-полторы могу дать Си код выдающий два угла. Быстрее сейчас не смогу.
Ну, если выражаться в АВРках, то меги8-16 вполне достаточно. Парсинг строк, кстати, не намного менее ресурсоемкая задача.
P.S.-если дашь выход своего GPSа, то за неделю-полторы могу дать Си код выдающий два угла. Быстрее сейчас не смогу.
RLAN> Делал антенну немного по другой модели. Было несколько вариантов, и пару книжек. вот этот расчетчик мне показался лучшим.
RLAN> Кроме того, во всех книжках центральный ввод фидера не рекомендуют, несколько отрицательных моментов, все не помню, помню снижение усиления. Предлагают по образующей спирали.
RLAN> Всего у меня 5,5 витков после согласующего трансформатора.
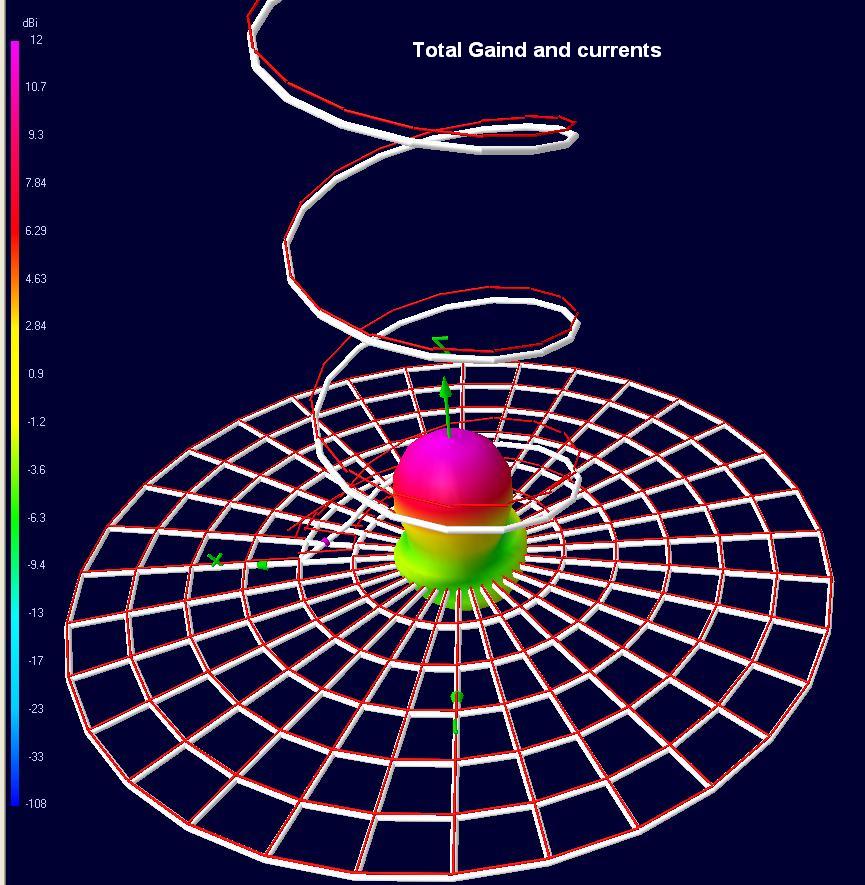
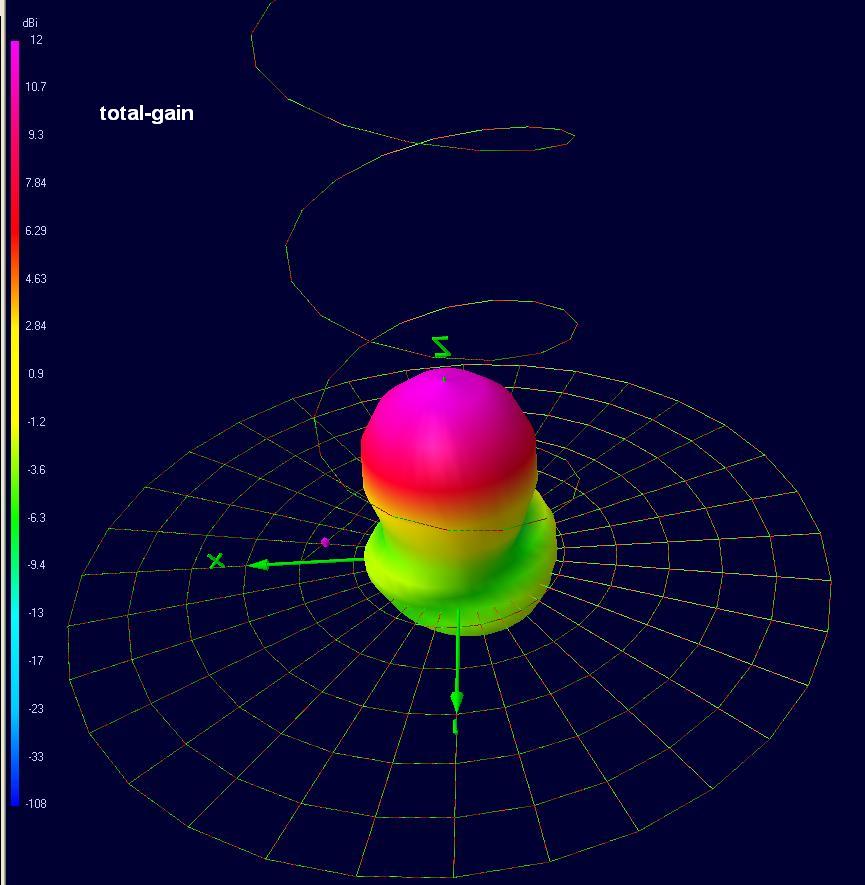
Сколько я встречал «калькуляторов» для спиралок, каждый считает по-своему. Прокрутил модельку по твоим данным. Но в другой проге 4NEC2. В ней, в отличии от MMANA-GAL_Basic, «катушку» не надо рисовать вручную. Но есть некоторые отличия в работе этих программ. В MMANA потом нарисую. С инетом у мя тут напряжена, поэтому, выложу что смогу. Вот, что получилось: импеданс антенны 111+j7,8 Ом, согласовать можно 75-омным кабелем 0,26 лямбда. Усиление 12dBi, ширина лепестка 40гр., отношение фронт/тыл 13dB. Здесь в архиве все основные файлы, дальше пойдут картинки.
RLAN> Кроме того, во всех книжках центральный ввод фидера не рекомендуют, несколько отрицательных моментов, все не помню, помню снижение усиления. Предлагают по образующей спирали.
RLAN> Всего у меня 5,5 витков после согласующего трансформатора.
Сколько я встречал «калькуляторов» для спиралок, каждый считает по-своему. Прокрутил модельку по твоим данным. Но в другой проге 4NEC2. В ней, в отличии от MMANA-GAL_Basic, «катушку» не надо рисовать вручную. Но есть некоторые отличия в работе этих программ. В MMANA потом нарисую. С инетом у мя тут напряжена, поэтому, выложу что смогу. Вот, что получилось: импеданс антенны 111+j7,8 Ом, согласовать можно 75-омным кабелем 0,26 лямбда. Усиление 12dBi, ширина лепестка 40гр., отношение фронт/тыл 13dB. Здесь в архиве все основные файлы, дальше пойдут картинки.
Ещё рисунки
Прикреплённые файлы:
Tot-gain2.rar (скачать)
[169 кБ]
Это сообщение редактировалось 11.02.2013 в 18:32
MartKot> Ещё рисунки
Последние.
Последние.
MartKot>> Ещё рисунки
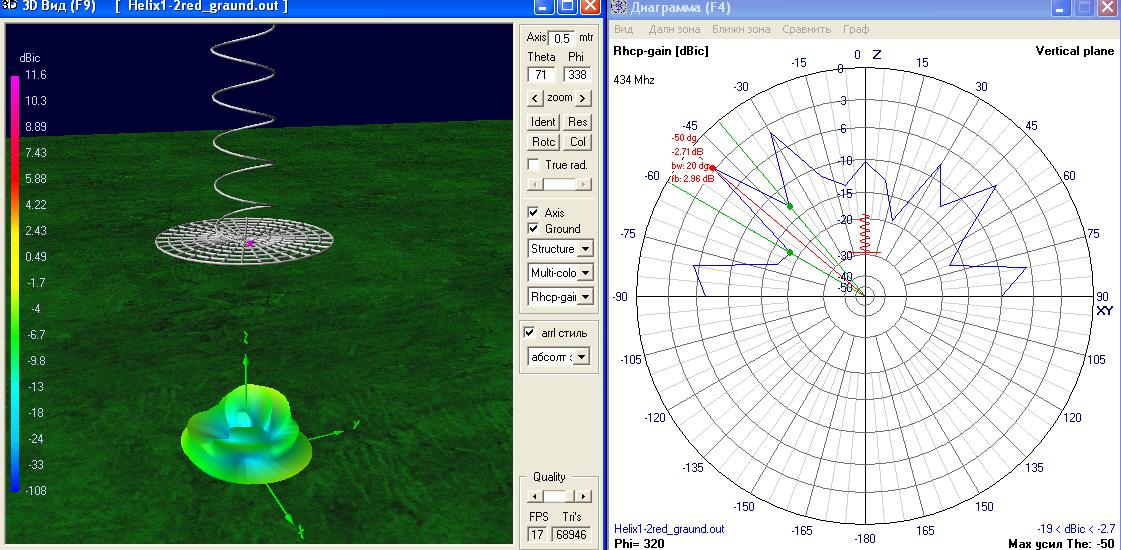
P.S. Забыл в проге поставить построение для правой поляризации, так что антенна получилась левой поляризации (это для заметки). Здесь ещё графики сканирования антенны в полосе 400МГц – 600МГц для сопротивления, усиления, КСВ. Хорошая широкая полоса получается. От выбора точки питания зависит импеданс антенны. Ближе к центру антенны – Z снижается. Земля мало влияет, предыдущие построения для свободного пространства, здесь в архиве для антенны расположенной в 1метре от земли. Усиление на противоположной поляризации, по главному лепестку (здесь правая) на уровне -10dB. У GPS-ок, кстати, антенны тоже с круговой поляризацией.
P.S. Забыл в проге поставить построение для правой поляризации, так что антенна получилась левой поляризации (это для заметки). Здесь ещё графики сканирования антенны в полосе 400МГц – 600МГц для сопротивления, усиления, КСВ. Хорошая широкая полоса получается. От выбора точки питания зависит импеданс антенны. Ближе к центру антенны – Z снижается. Земля мало влияет, предыдущие построения для свободного пространства, здесь в архиве для антенны расположенной в 1метре от земли. Усиление на противоположной поляризации, по главному лепестку (здесь правая) на уровне -10dB. У GPS-ок, кстати, антенны тоже с круговой поляризацией.
Прикреплённые файлы:
Helix1-2red_graund.rar (скачать)
[344 кБ]
Поигрался с приводом. 100Гц на оба шаговика. С удержанием пока не разобрался, но это важно только для поворота по азимуту, нет четкой остановки. Штатив хлипкий и сильно болтает, надо или сварить, или найти где то от теодолита. Работает от 12В и ток под 3А на каждый двигатель.
Надо устранить болтанку, отработать режим удержания (немного придется драйвер подшаманить).
По азимуту частоту вполне можно уменьшить вдвое.
MartKot>
Еще раз спасибо. Но если это тебе нравится - хорошо. Если для меня - аж неудобно, я то этим пользоваться не буду, более того - не доверяю так полученным данным.
Надо устранить болтанку, отработать режим удержания (немного придется драйвер подшаманить).
По азимуту частоту вполне можно уменьшить вдвое.
MartKot>
Еще раз спасибо. Но если это тебе нравится - хорошо. Если для меня - аж неудобно, я то этим пользоваться не буду, более того - не доверяю так полученным данным.
Купил модули SIM68R. Отдал в работу. Недостающий радиомодуль RFM-12BP на подходе.
Надо еще активную антенну GPS/GLONASS купить, чисто GPSная есть, но лучше, думаю, соответствующую, тем более активную.
Сварил штатив из труб 3/4 и фланца от тормозного диска. Стоит очень хорошо
Методом тыка подбираю режим шаговиков. Включил микрошаговый режим, 1/8 для угла места и 1/16 для азимута. 1кГц, движения намного плавнее и тише (звук). Плюс непонятно за счет чего ток в паузах не увеличивается, что вполне меня устраивает, 3А на два мотора, удержание с этим током отличное, не провернешь. Может все и получится
Вот бы еще сэмулировать задачи и посмотреть на загрузку контроллера.
Надо еще активную антенну GPS/GLONASS купить, чисто GPSная есть, но лучше, думаю, соответствующую, тем более активную.
Сварил штатив из труб 3/4 и фланца от тормозного диска. Стоит очень хорошо
Методом тыка подбираю режим шаговиков. Включил микрошаговый режим, 1/8 для угла места и 1/16 для азимута. 1кГц, движения намного плавнее и тише (звук). Плюс непонятно за счет чего ток в паузах не увеличивается, что вполне меня устраивает, 3А на два мотора, удержание с этим током отличное, не провернешь. Может все и получится
Вот бы еще сэмулировать задачи и посмотреть на загрузку контроллера.
Прикреплённые файлы:
sim68r_spec-v1.01.pdf (скачать)
[111 кБ]

Написал вечером как бы ТЗ.
Алгоритм работы.
1. Ввод данных, координаты точки старта, координаты точки наблюдения.
По умолчанию - высота двух точек одинакова (если не одинакова, считаем высоту точки наблюдения равной высоте точки старта) Вычитая из координат точки старта координаты точки наблюдения и домножая на коэффициент по широте и долготе, получаем координаты Х0 и Y0, Z0=0
2. Проверка состояния концевиков, выведение их на ноль. Проверка по видеокамере, что настройка на точку старта верна.
3. После запуска GPS/GLONASS приемника и бортового передатчика запуск системы слежения.
4. Прием данных о местоположении ракеты (широта, долгота, высота) и данных барометра. Данные барометра переводятся в высоту по таблице.
Из текущих координат вычитаются координаты точки наблюдения.
Если координаты совпадают - особый случай - описывается отдельно.
Домножаются на коэффициент по широте и долготе, получаем координаты Х , Y и Z.
5.Вычисление угла места = arctg (Z/sqrt (Х*X +Y*Y))
Угол в радианах. Диапазон значений от 0 до Пи/2, Пи/2- соответствует 1000 шагам от нулевого положения.
Достаточно 50 фиксированных значений угла.
Если передачи координат по какой то причине нет, то за значение Z берется высота по барометрическому датчику, Значения X и Y принимаются последние (точки старта, если пропадание случилось на старте).
6. Вычисление азимута = sign(X0*Y+X*Y0)arcos((X0*Y+X*Y0)/(sqrt(X*X+Y*Y)+sqrt(X0*X0+Y0*Y0))
Если знак положительный –поворот против часовой стрелки, отрицательный – по.
При пропадании данных GPS/GLONASS – слежение по азимуту не осуществляется.
Диапазон значений от –Пи до Пи.
Необходимое количество точек ±100 , это примерно 600 шагов шаговика налево и направо.
7. Как опция возможно ручное управление по экрану (видеокамера). Например, при пропадании данных GPS/GLONASS разблокируется возможность поворота от кнопок влево/вправо, а при пропадании приема вообще и вверх/вниз.
8. Особая точка – вертикаль над точкой наблюдения – где X и Y оба обращаются в 0.
Маловероятное событие, но тем не менее его необходимо отследить для корректной работы функций.
При таком событии угол места принимает максимальное значение (вертикально вверх), азимут соответствует последнему предыдущему значению.
9. Возможны варианты движения, при которых азимут достигает значения Пи или –Пи. По идее надо делать возвратный оборот, что бы не перекручивались провода внутри платформы, вроде бы по описанному алгоритму именно так и должно работать. Однако полный поворот может вызвать потерю данных, и это можно обыграть без такого проворота, например до полного оборота и сигнала от концевика.
10. В описании пропустил процедуру перевода строки координат в численное значение.
Для нашей задачи необходимая точность – градусы долготы и широты с тремя разрядами после запятой, высота – без единиц метров.
Коэффициент домножения - 111,2 км/градус по широте и 73,5км/градус по долготе. Коэффициент по долготе зависит от широты и может быть введен вручную или рассчитан по координате точки наблюдения.
Алгоритм работы.
1. Ввод данных, координаты точки старта, координаты точки наблюдения.
По умолчанию - высота двух точек одинакова (если не одинакова, считаем высоту точки наблюдения равной высоте точки старта) Вычитая из координат точки старта координаты точки наблюдения и домножая на коэффициент по широте и долготе, получаем координаты Х0 и Y0, Z0=0
2. Проверка состояния концевиков, выведение их на ноль. Проверка по видеокамере, что настройка на точку старта верна.
3. После запуска GPS/GLONASS приемника и бортового передатчика запуск системы слежения.
4. Прием данных о местоположении ракеты (широта, долгота, высота) и данных барометра. Данные барометра переводятся в высоту по таблице.
Из текущих координат вычитаются координаты точки наблюдения.
Если координаты совпадают - особый случай - описывается отдельно.
Домножаются на коэффициент по широте и долготе, получаем координаты Х , Y и Z.
5.Вычисление угла места = arctg (Z/sqrt (Х*X +Y*Y))
Угол в радианах. Диапазон значений от 0 до Пи/2, Пи/2- соответствует 1000 шагам от нулевого положения.
Достаточно 50 фиксированных значений угла.
Если передачи координат по какой то причине нет, то за значение Z берется высота по барометрическому датчику, Значения X и Y принимаются последние (точки старта, если пропадание случилось на старте).
6. Вычисление азимута = sign(X0*Y+X*Y0)arcos((X0*Y+X*Y0)/(sqrt(X*X+Y*Y)+sqrt(X0*X0+Y0*Y0))
Если знак положительный –поворот против часовой стрелки, отрицательный – по.
При пропадании данных GPS/GLONASS – слежение по азимуту не осуществляется.
Диапазон значений от –Пи до Пи.
Необходимое количество точек ±100 , это примерно 600 шагов шаговика налево и направо.
7. Как опция возможно ручное управление по экрану (видеокамера). Например, при пропадании данных GPS/GLONASS разблокируется возможность поворота от кнопок влево/вправо, а при пропадании приема вообще и вверх/вниз.
8. Особая точка – вертикаль над точкой наблюдения – где X и Y оба обращаются в 0.
Маловероятное событие, но тем не менее его необходимо отследить для корректной работы функций.
При таком событии угол места принимает максимальное значение (вертикально вверх), азимут соответствует последнему предыдущему значению.
9. Возможны варианты движения, при которых азимут достигает значения Пи или –Пи. По идее надо делать возвратный оборот, что бы не перекручивались провода внутри платформы, вроде бы по описанному алгоритму именно так и должно работать. Однако полный поворот может вызвать потерю данных, и это можно обыграть без такого проворота, например до полного оборота и сигнала от концевика.
10. В описании пропустил процедуру перевода строки координат в численное значение.
Для нашей задачи необходимая точность – градусы долготы и широты с тремя разрядами после запятой, высота – без единиц метров.
Коэффициент домножения - 111,2 км/градус по широте и 73,5км/градус по долготе. Коэффициент по долготе зависит от широты и может быть введен вручную или рассчитан по координате точки наблюдения.
Реклама Google — средство выживания форумов :)
Закончил с платформой.
Удержание нормальное, частоту и коэффициент микрошага подобрал, все облагородил и разместил в корпусе с вентиляцией, без нее греется.
Вибрация при остановах существенная, но пропуску шагов не приводит. Но уменьшить ее нет вариантов, это люфты конструкции. По уму надо сделать самодельную более жесткую турель. Но не сейчас.
Вибрация отражается на концевых датчиках в зоне их срабатывания, они аналоговые. Надо это обходить программно.
Работа по приемнику GPS/GLONASS и передатчику продолжается, к обработке управления пока не приступили.
Удержание нормальное, частоту и коэффициент микрошага подобрал, все облагородил и разместил в корпусе с вентиляцией, без нее греется.
Вибрация при остановах существенная, но пропуску шагов не приводит. Но уменьшить ее нет вариантов, это люфты конструкции. По уму надо сделать самодельную более жесткую турель. Но не сейчас.
Вибрация отражается на концевых датчиках в зоне их срабатывания, они аналоговые. Надо это обходить программно.
Работа по приемнику GPS/GLONASS и передатчику продолжается, к обработке управления пока не приступили.
Copyright © Balancer 1997..2024
Создано 25.10.2010
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 25.10.2010
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
