 Xan
Xan

 инфо
инфо инструменты
инструменты Ckona
Ckona

 Бывший генералиссимус
Бывший генералиссимус

 a_centaurus
a_centaurus


 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
Ckona> Вызывает сомнение тезис о коммутативности малых поворотов. 50 малых поворотов - это один большой.
Это про то, что сумма маленьких поворотов по нескольким осям не зависит от порядка поворотов, ЕСЛИ результирующий поворот тоже маленький.
Именно это и выполняется при большой частоте обработки поворотов.
А результирующие маленькие повороты складываются в большой строго последовательно, тут порядка не поменяешь уже.
Ckona> Также (у меня) чешется за лысиной по поводу ухода гироскопов за время, бОльшее единиц секунд. Если мы работаем с малыми углами за малые промежутки времени, то рано или поздно случайное значение "блуда" (не "шума" !) превысит полезное приращение. Правда, с этим можно хоть как-то "воевать", заранее измерив статистику "блуда" индивидуально по каждому из каналов.
Для вертолётов сейчас гироскопы хороши.
И для неторопливо взлетающей ракеты тоже.
Но вот когда ракета разгоняется до километров в секунду, вылезает "линейный эффект" — уход нуля гироскопа от линейного ускорения. Для 7 км/с он может быть аж 70 градусов.
Вот это и не даёт запустить спутник только на гироскопах.
Это про то, что сумма маленьких поворотов по нескольким осям не зависит от порядка поворотов, ЕСЛИ результирующий поворот тоже маленький.
Именно это и выполняется при большой частоте обработки поворотов.
А результирующие маленькие повороты складываются в большой строго последовательно, тут порядка не поменяешь уже.
Ckona> Также (у меня) чешется за лысиной по поводу ухода гироскопов за время, бОльшее единиц секунд. Если мы работаем с малыми углами за малые промежутки времени, то рано или поздно случайное значение "блуда" (не "шума" !) превысит полезное приращение. Правда, с этим можно хоть как-то "воевать", заранее измерив статистику "блуда" индивидуально по каждому из каналов.
Для вертолётов сейчас гироскопы хороши.
И для неторопливо взлетающей ракеты тоже.
Но вот когда ракета разгоняется до километров в секунду, вылезает "линейный эффект" — уход нуля гироскопа от линейного ускорения. Для 7 км/с он может быть аж 70 градусов.
Вот это и не даёт запустить спутник только на гироскопах.


Xan> Не вижу проблемы.
Хм, интересная мысля пришла. (или бредятина)
"Классика" объединения разнородных данных для-ради точных траекторных измерений
(ну там Калман и проч.) предусматривает подачу на обработку "сродственных" данных
(углы от гиро, углы от пиро, координаты инерциалки, координаты ЖПС), хотя конечная
задача вычислений - команда на исполнительные органы.
А что если замутить вычисления, объединив данные не только от разнородных источников, но и на разных этапах вычислений ? Например, после получения рассогласования по данным гироскопов, продолжить "по Калману" обработку с данными по оптическим датчикам и акселерометрии... Тогда гироскопические ошибки будут по-другому влиять на результат...
Хм, интересная мысля пришла. (или бредятина)
"Классика" объединения разнородных данных для-ради точных траекторных измерений
(ну там Калман и проч.) предусматривает подачу на обработку "сродственных" данных
(углы от гиро, углы от пиро, координаты инерциалки, координаты ЖПС), хотя конечная
задача вычислений - команда на исполнительные органы.
А что если замутить вычисления, объединив данные не только от разнородных источников, но и на разных этапах вычислений ? Например, после получения рассогласования по данным гироскопов, продолжить "по Калману" обработку с данными по оптическим датчикам и акселерометрии... Тогда гироскопические ошибки будут по-другому влиять на результат...



Xan> Для планируемой микрухи предельная скорость 2000 градусов в секунду.
Это у какой? вроде ты писал, что у тебя ADIS16080?
Xan> А так-то я планирую крен жёстко поддерживать нулевой (по отношению к солнцу). Скорость у него будет совсем маленькая.
Не выйдет. Ракету желательно пускать на восток, при этом влияние солнца на крен околонулевое. Вот на тангаж и рыскание - да. Вопрос на засыпку - на сколько градусов уходит солнце за время активного участка (точнее, разворота по тангажу)?
Xan> При частоте отсчётов 400 получится максимум 5 градусов за квант. Можно сделать частоту 800.
пять градусов на макс-ку - ракета сломается.
Б.г.>> Я тоже сторонник работы в областях малых углов и квазилинейного приближения, но оно работает только при малости угловых скоростей по всем трём осям.
Xan> Ну так если скорость мозгов большая, то малые углы и получатся. Несмотря на большие скорости.
Б.г.>> Вопрос - совместима ли эта малость угловых скоростей с терминальным управлением? мне кажется, нет.
Xan> Почему?
Xan> Надо поддерживать углы не сильно отклонёнными, чтоб вектор скорости рос в нужном направлении. А близость движения к "расчётной траектории" не нужна.
Xan> Не вижу проблемы.
Плохо, что не видишь. У тебя нет абсолютного датчика высоты, высоту ты набираешь за счёт вертикальной компоненты скорости, если у тебя ошибка в определении этой компоненты, то и в высоте перигея будет ошибка, и порядочная.
С ADIS16300 в канале тангажа и времени разворота по гироскопу 3 минуты (дальше только по солнцу) у меня получалось (я тут выкладывал график) больше плюс-минус 20 км для трёх сигма. При этом апогей изменяется в 12-15 раз сильнее, но это не страшно. Страшно цеплять атмосферу в перигее...
Это у какой? вроде ты писал, что у тебя ADIS16080?
Xan> А так-то я планирую крен жёстко поддерживать нулевой (по отношению к солнцу). Скорость у него будет совсем маленькая.
Не выйдет. Ракету желательно пускать на восток, при этом влияние солнца на крен околонулевое. Вот на тангаж и рыскание - да. Вопрос на засыпку - на сколько градусов уходит солнце за время активного участка (точнее, разворота по тангажу)?
Xan> При частоте отсчётов 400 получится максимум 5 градусов за квант. Можно сделать частоту 800.
пять градусов на макс-ку - ракета сломается.
Б.г.>> Я тоже сторонник работы в областях малых углов и квазилинейного приближения, но оно работает только при малости угловых скоростей по всем трём осям.
Xan> Ну так если скорость мозгов большая, то малые углы и получатся. Несмотря на большие скорости.
Б.г.>> Вопрос - совместима ли эта малость угловых скоростей с терминальным управлением? мне кажется, нет.
Xan> Почему?
Xan> Надо поддерживать углы не сильно отклонёнными, чтоб вектор скорости рос в нужном направлении. А близость движения к "расчётной траектории" не нужна.
Xan> Не вижу проблемы.
Плохо, что не видишь. У тебя нет абсолютного датчика высоты, высоту ты набираешь за счёт вертикальной компоненты скорости, если у тебя ошибка в определении этой компоненты, то и в высоте перигея будет ошибка, и порядочная.
С ADIS16300 в канале тангажа и времени разворота по гироскопу 3 минуты (дальше только по солнцу) у меня получалось (я тут выкладывал график) больше плюс-минус 20 км для трёх сигма. При этом апогей изменяется в 12-15 раз сильнее, но это не страшно. Страшно цеплять атмосферу в перигее...


Ckona> Например, после получения рассогласования по данным гироскопов, продолжить "по Калману" обработку с данными по оптическим датчикам и акселерометрии...
"Рассогласования по данным гироскопов" - между чем и чем? Насколько я понял, Xan ведёт речь как раз о том, чтобы "одёргивать" гироскопы по солнечному датчику... Т.е. именно о том, что процитировано.
"Рассогласования по данным гироскопов" - между чем и чем? Насколько я понял, Xan ведёт речь как раз о том, чтобы "одёргивать" гироскопы по солнечному датчику... Т.е. именно о том, что процитировано.
Прошу прощения что вмешиваюсь в беседу про солнечные датчики...
А не подойдет сенсор от оптической мышки?
18х18 точек даже в самых простых древних мышках, если его затонировать и использовать линзу типа "рыбий глаз" то вполне можно получить приемлемое направление на солнце.
А не подойдет сенсор от оптической мышки?
18х18 точек даже в самых простых древних мышках, если его затонировать и использовать линзу типа "рыбий глаз" то вполне можно получить приемлемое направление на солнце.

Non-conformist> "Рассогласования по данным гироскопов" - между чем и чем?
Между фактической ориентацией ракеты (по данным измерений) и требуемой ориентацией по программе полета. Другими словами, сигнал ошибки в следящей системе.
Между фактической ориентацией ракеты (по данным измерений) и требуемой ориентацией по программе полета. Другими словами, сигнал ошибки в следящей системе.
Б.г.> Это у какой? вроде ты писал, что у тебя ADIS16080?
Уже нет.
Я изменил Анальным Девицам!!!
L3G4200D — 3 гиро;
LSM303DLHC — 3 акселерометра + 3 магнитных;
TSL3301CL — линейка фотодиодов.
Б.г.> Не выйдет. Ракету желательно пускать на восток, при этом влияние солнца на крен околонулевое. Вот на тангаж и рыскание - да. Вопрос на засыпку - на сколько градусов уходит солнце за время активного участка (точнее, разворота по тангажу)?
Ну, была мысль пускать до восхода, а как над горизонтом поднимется, строго на солнце разгоняться. Но такое счастье только два раза в год бывает.")
Предполагается, что до выхода из атмосферы ракета наклонится градусов на 30 от вертикали. Потом пассивный участок 4 минуты, там траектория повернёт на 60 градусов. А потом горизонтальный разгон. Секунд за 30, так что при этом "всё прямо".
Сейчас мысль пускать посредине между завтраком и обедом, там все углы немаленькие.
Или даже в обед, но это только зимой можно, чтоб угол с магнитным полем был достаточно большой.
Вообще симулятор я ещё не сделал, точны цифры ещё не знаю, может и вылезет что-нибудь неочевидное.
Б.г.> пять градусов на макс-ку - ракета сломается.
Ну откуда взяться таким большим скоростям? Только если действительно сломается, тогда чтоб кувыркание трупа правильно регистрировать!
Xan>> Не вижу проблемы.
Б.г.> Плохо, что не видишь. У тебя нет абсолютного датчика высоты, высоту ты набираешь за счёт вертикальной компоненты скорости, если у тебя ошибка в определении этой компоненты, то и в высоте перигея будет ошибка, и порядочная.
Направление почти вертикальное, косинус близок к единице, ошибка на 1% в ускорении даст 2% в высоте. Тут всё гладко.
Б.г.> С ADIS16300 в канале тангажа и времени разворота по гироскопу 3 минуты (дальше только по солнцу) у меня получалось (я тут выкладывал график) больше плюс-минус 20 км для трёх сигма. При этом апогей изменяется в 12-15 раз сильнее, но это не страшно. Страшно цеплять атмосферу в перигее...
Ты на человеческую орбиту рассчитываешь или на военную? В смысле радиации?
Уже нет.
Я изменил Анальным Девицам!!!
L3G4200D — 3 гиро;
LSM303DLHC — 3 акселерометра + 3 магнитных;
TSL3301CL — линейка фотодиодов.
Б.г.> Не выйдет. Ракету желательно пускать на восток, при этом влияние солнца на крен околонулевое. Вот на тангаж и рыскание - да. Вопрос на засыпку - на сколько градусов уходит солнце за время активного участка (точнее, разворота по тангажу)?
Ну, была мысль пускать до восхода, а как над горизонтом поднимется, строго на солнце разгоняться. Но такое счастье только два раза в год бывает.
Предполагается, что до выхода из атмосферы ракета наклонится градусов на 30 от вертикали. Потом пассивный участок 4 минуты, там траектория повернёт на 60 градусов. А потом горизонтальный разгон. Секунд за 30, так что при этом "всё прямо".
Сейчас мысль пускать посредине между завтраком и обедом, там все углы немаленькие.
Или даже в обед, но это только зимой можно, чтоб угол с магнитным полем был достаточно большой.
Вообще симулятор я ещё не сделал, точны цифры ещё не знаю, может и вылезет что-нибудь неочевидное.
Б.г.> пять градусов на макс-ку - ракета сломается.
Ну откуда взяться таким большим скоростям? Только если действительно сломается, тогда чтоб кувыркание трупа правильно регистрировать!
Xan>> Не вижу проблемы.
Б.г.> Плохо, что не видишь. У тебя нет абсолютного датчика высоты, высоту ты набираешь за счёт вертикальной компоненты скорости, если у тебя ошибка в определении этой компоненты, то и в высоте перигея будет ошибка, и порядочная.
Направление почти вертикальное, косинус близок к единице, ошибка на 1% в ускорении даст 2% в высоте. Тут всё гладко.
Б.г.> С ADIS16300 в канале тангажа и времени разворота по гироскопу 3 минуты (дальше только по солнцу) у меня получалось (я тут выкладывал график) больше плюс-минус 20 км для трёх сигма. При этом апогей изменяется в 12-15 раз сильнее, но это не страшно. Страшно цеплять атмосферу в перигее...
Ты на человеческую орбиту рассчитываешь или на военную? В смысле радиации?
Evgeniz> А не подойдет сенсор от оптической мышки?
Evgeniz> 18х18 точек даже в самых простых древних мышках
Мысль такая была.
1. Трудно найти мышь, в которой датчик может отдать картинку компу. Современные всё сами внутри себя делают, снаружи только готовые смещения видны.
2. С одной стороны — мало пикселов, надо программно вытаскивать промежуточные значения, чтоб получить достаточную точность.
3. С другой стороны — слишком много пикселов, надо программно шариться по всему массиву, чтоб найти солнце.
Два линейных датчика в этом смысле проще.
Evgeniz> 18х18 точек даже в самых простых древних мышках
Мысль такая была.
1. Трудно найти мышь, в которой датчик может отдать картинку компу. Современные всё сами внутри себя делают, снаружи только готовые смещения видны.
2. С одной стороны — мало пикселов, надо программно вытаскивать промежуточные значения, чтоб получить достаточную точность.
3. С другой стороны — слишком много пикселов, надо программно шариться по всему массиву, чтоб найти солнце.
Два линейных датчика в этом смысле проще.
Б.г.>> Это у какой? вроде ты писал, что у тебя ADIS16080?
Xan> Уже нет.
Xan> Я изменил Анальным Девицам!!!
Xan> L3G4200D — 3 гиро;
Xan> LSM303DLHC — 3 акселерометра + 3 магнитных;
Я купил демо-платку ST32Discovery, там такие же чипы стоят, но на точность их не испытывал. Магнитный же компас врёт уже в пределах 1/8 круга.
Xan> TSL3301CL — линейка фотодиодов.
Xan> Ну, была мысль пускать до восхода, а как над горизонтом поднимется, строго на солнце разгоняться. Но такое счастье только два раза в год бывает.
Да, я до этого додумался ещё в 2004. Но, по факту, Восток так садился. Между прочим, оно получается вовсе не в день равноденствия, а на целую неделю раньше или позже - если мы пускаем из Капьяра на его минимальное наклонение 48,4, например.
Xan> Предполагается, что до выхода из атмосферы ракета наклонится градусов на 30 от вертикали. Потом пассивный участок 4 минуты, там траектория повернёт на 60 градусов.
У меня получались несколько другие циферки, пассивный участок 4 минуты, это что-то очень долго. На какую высоту планируешь забраться?
Xan> А потом горизонтальный разгон. Секунд за 30, так что при этом "всё прямо".
Опять же, 30 секунд многовато для "всё прямо", да и для стандартных, оптимизированных для УИ топливах на ПХА, многовато - большой диаметр нужен. 10-15 секунд - более реальное время.
Б.г.>> Страшно цеплять атмосферу в перигее...
Xan> Ты на человеческую орбиту рассчитываешь или на военную? В смысле радиации?
Я считал для очень низких орбит, чтобы только продержаться до обнаружения американской ССКП. Целевая 140х260, с учётом разброса гироскопов от 120 перигей до 160, при этом апогей от тех же 120 до 390.
Xan> Уже нет.
Xan> Я изменил Анальным Девицам!!!
Xan> L3G4200D — 3 гиро;
Xan> LSM303DLHC — 3 акселерометра + 3 магнитных;
Я купил демо-платку ST32Discovery, там такие же чипы стоят, но на точность их не испытывал. Магнитный же компас врёт уже в пределах 1/8 круга.
Xan> TSL3301CL — линейка фотодиодов.
Xan> Ну, была мысль пускать до восхода, а как над горизонтом поднимется, строго на солнце разгоняться. Но такое счастье только два раза в год бывает.
Да, я до этого додумался ещё в 2004. Но, по факту, Восток так садился. Между прочим, оно получается вовсе не в день равноденствия, а на целую неделю раньше или позже - если мы пускаем из Капьяра на его минимальное наклонение 48,4, например.
Xan> Предполагается, что до выхода из атмосферы ракета наклонится градусов на 30 от вертикали. Потом пассивный участок 4 минуты, там траектория повернёт на 60 градусов.
У меня получались несколько другие циферки, пассивный участок 4 минуты, это что-то очень долго. На какую высоту планируешь забраться?
Xan> А потом горизонтальный разгон. Секунд за 30, так что при этом "всё прямо".
Опять же, 30 секунд многовато для "всё прямо", да и для стандартных, оптимизированных для УИ топливах на ПХА, многовато - большой диаметр нужен. 10-15 секунд - более реальное время.
Б.г.>> Страшно цеплять атмосферу в перигее...
Xan> Ты на человеческую орбиту рассчитываешь или на военную? В смысле радиации?
Я считал для очень низких орбит, чтобы только продержаться до обнаружения американской ССКП. Целевая 140х260, с учётом разброса гироскопов от 120 перигей до 160, при этом апогей от тех же 120 до 390.
Б.г.> Я купил демо-платку ST32Discovery, там такие же чипы стоят, но на точность их не испытывал.
Обещают точность лучше, но про линейный эффект скромно умалчивают.
Так что я готов к подляне.
Б.г.> Магнитный же компас врёт уже в пределах 1/8 круга.
Странно это.
Если датчики линейные и если рядом нет проводов/железок, то это только сглаз или торсионные поля!!!
Ну и надо учитывать, что это только механический компас крутит стрелкой в горизонтальном направлении, а на самом деле линии поля торчат почти вертикально: у меня 63 градуса от горизонтали, у москвичей вообще к 75.
Б.г.> У меня получались несколько другие циферки, пассивный участок 4 минуты, это что-то очень долго. На какую высоту планируешь забраться?
350-400
Б.г.> Опять же, 30 секунд многовато для "всё прямо", да и для стандартных, оптимизированных для УИ топливах на ПХА, многовато - большой диаметр нужен. 10-15 секунд - более реальное время.
Две ступени по 15.
Думаю, может быстрее сделать. Ускорение под сотню...
Б.г.> Целевая 140х260
У меня для круговой и для маленького спутника получилось:
с 350 до 300 — две недели;
с 300 до 200 — неделя;
с 200 до нуля полтора витка.
Обещают точность лучше, но про линейный эффект скромно умалчивают.
Так что я готов к подляне.
Б.г.> Магнитный же компас врёт уже в пределах 1/8 круга.
Странно это.
Если датчики линейные и если рядом нет проводов/железок, то это только сглаз или торсионные поля!!!
Ну и надо учитывать, что это только механический компас крутит стрелкой в горизонтальном направлении, а на самом деле линии поля торчат почти вертикально: у меня 63 градуса от горизонтали, у москвичей вообще к 75.
Б.г.> У меня получались несколько другие циферки, пассивный участок 4 минуты, это что-то очень долго. На какую высоту планируешь забраться?
350-400
Б.г.> Опять же, 30 секунд многовато для "всё прямо", да и для стандартных, оптимизированных для УИ топливах на ПХА, многовато - большой диаметр нужен. 10-15 секунд - более реальное время.
Две ступени по 15.
Думаю, может быстрее сделать. Ускорение под сотню...
Б.г.> Целевая 140х260
У меня для круговой и для маленького спутника получилось:
с 350 до 300 — две недели;
с 300 до 200 — неделя;
с 200 до нуля полтора витка.
Б.г.>> Я купил демо-платку ST32Discovery, там такие же чипы стоят, но на точность их не испытывал.
Xan> Обещают точность лучше, но про линейный эффект скромно умалчивают.
А где можно в даташите про их точность почитать? Ты уже пробовал статистику собирать? а ADIS16080 пробовал включать? или так и лежат?
Б.г.>> Магнитный же компас врёт уже в пределах 1/8 круга.
Xan> Странно это.
Xan> Если датчики линейные и если рядом нет проводов/железок, то это только сглаз или торсионные поля!!!
Вопрос в том, что такое "рядом"...
Б.г.>> У меня получались несколько другие циферки, пассивный участок 4 минуты, это что-то очень долго. На какую высоту планируешь забраться?
Xan> 350-400
Б.г.>> Опять же, 30 секунд многовато для "всё прямо", да и для стандартных, оптимизированных для УИ топливах на ПХА, многовато - большой диаметр нужен. 10-15 секунд - более реальное время.
Xan> Две ступени по 15.
Xan> Думаю, может быстрее сделать. Ускорение под сотню...
Под сотню же или под сотню м/с2? у меня 400 м/с2 выходит а у первого американского спутника ещё больше было...
Б.г.>> Целевая 140х260
Xan> У меня для круговой и для маленького спутника получилось:
Xan> с 350 до 300 — две недели;
Xan> с 300 до 200 — неделя;
Xan> с 200 до нуля полтора витка.
Это от активности солнца зависит, но что-то ты загибаешь... У первого спутника перигей выведения был 225 км, и он продержался на орбите 90 дней, а пустая 2-я ступень - на три недели меньше.
Да и для "Союза" орбита выведения 197х220, и при этом он минимум 30 оборотов может совершить.
Фобос-грунт вон, последние витки по орбите с перигеем меньше 110 накручивал.
Xan> Обещают точность лучше, но про линейный эффект скромно умалчивают.
А где можно в даташите про их точность почитать? Ты уже пробовал статистику собирать? а ADIS16080 пробовал включать? или так и лежат?
Б.г.>> Магнитный же компас врёт уже в пределах 1/8 круга.
Xan> Странно это.
Xan> Если датчики линейные и если рядом нет проводов/железок, то это только сглаз или торсионные поля!!!
Вопрос в том, что такое "рядом"...
Б.г.>> У меня получались несколько другие циферки, пассивный участок 4 минуты, это что-то очень долго. На какую высоту планируешь забраться?
Xan> 350-400
Б.г.>> Опять же, 30 секунд многовато для "всё прямо", да и для стандартных, оптимизированных для УИ топливах на ПХА, многовато - большой диаметр нужен. 10-15 секунд - более реальное время.
Xan> Две ступени по 15.
Xan> Думаю, может быстрее сделать. Ускорение под сотню...
Под сотню же или под сотню м/с2? у меня 400 м/с2 выходит
а у первого американского спутника ещё больше было...Б.г.>> Целевая 140х260
Xan> У меня для круговой и для маленького спутника получилось:
Xan> с 350 до 300 — две недели;
Xan> с 300 до 200 — неделя;
Xan> с 200 до нуля полтора витка.
Это от активности солнца зависит, но что-то ты загибаешь... У первого спутника перигей выведения был 225 км, и он продержался на орбите 90 дней, а пустая 2-я ступень - на три недели меньше.
Да и для "Союза" орбита выведения 197х220, и при этом он минимум 30 оборотов может совершить.
Фобос-грунт вон, последние витки по орбите с перигеем меньше 110 накручивал.
Б.г.> А где можно в даташите про их точность почитать? Ты уже пробовал статистику собирать? а ADIS16080 пробовал включать? или так и лежат?
Ничего пока не делал, кроме компаса на рассыпухе. Но и его не запустил.
Очень не хотелось ещё и мерить температуру и для неё поправки писать.
Жизнь проходит, поэтому решил взять готовое.
Xan>> Если датчики линейные и если рядом нет проводов/железок, то это только сглаз или торсионные поля!!!
Б.г.> Вопрос в том, что такое "рядом"...
Ну, это просто: габариты железки разделить на расстояние и всё это в кубе. Это будет доля влияния, например (1/10)3 = 1/1000.
Это для ферритов, искажающих земное поле.
Для проводов тоже всё считается по школьным формулам.
Xan>> Думаю, может быстрее сделать. Ускорение под сотню...
Б.г.> Под сотню же или под сотню м/с2? у меня 400 м/с2 выходит
Под сотню же. Или даже больше.
Но при этом придётся закручивать, управлялка не справится.
И прочность всего надо большую делать, 20 граммовый спутник будет весить три кг.
Б.г.> Это от активности солнца зависит, но что-то ты загибаешь...
20 граммов с площадью около 1 дм — очень лёгкий.
Б.г.> Фобос-грунт вон, последние витки по орбите с перигеем меньше 110 накручивал.
Он тяжёленький, топливо не израсходовано.
Плотность на 110 км и на 200 отличается в 1300 раз.
У моего спутника плотность раз в 500 меньше, чем у Фобос-грунта.
Так что приходится карабкаться повыше.
code text
- L3G4200D.pdf
- Zero-rate level change vs temperature ±0.03 dps/C
- Rate noise density BW = 50 Hz 0.03 dps/sqrt(Hz)
- 3 V, 6.1 mA, 4*4*1 mm
- ADIS16080.pdf
- Zero Change Over Temperature ±0.14 dps/C (8.3 grad/sec/60C)
- Rate Noise Density 0.05 grad/sec/sqrt(Hz)
- Linear Acceleration Effect 0.2 C/sec/g
- 5 V, 8 mA, 8*8*5 mm
Ничего пока не делал, кроме компаса на рассыпухе. Но и его не запустил.
Очень не хотелось ещё и мерить температуру и для неё поправки писать.
Жизнь проходит, поэтому решил взять готовое.
Xan>> Если датчики линейные и если рядом нет проводов/железок, то это только сглаз или торсионные поля!!!
Б.г.> Вопрос в том, что такое "рядом"...
Ну, это просто: габариты железки разделить на расстояние и всё это в кубе. Это будет доля влияния, например (1/10)3 = 1/1000.
Это для ферритов, искажающих земное поле.
Для проводов тоже всё считается по школьным формулам.
Xan>> Думаю, может быстрее сделать. Ускорение под сотню...
Б.г.> Под сотню же или под сотню м/с2? у меня 400 м/с2 выходит
Под сотню же. Или даже больше.
Но при этом придётся закручивать, управлялка не справится.
И прочность всего надо большую делать, 20 граммовый спутник будет весить три кг.
Б.г.> Это от активности солнца зависит, но что-то ты загибаешь...
20 граммов с площадью около 1 дм — очень лёгкий.
Б.г.> Фобос-грунт вон, последние витки по орбите с перигеем меньше 110 накручивал.
Он тяжёленький, топливо не израсходовано.
Плотность на 110 км и на 200 отличается в 1300 раз.
У моего спутника плотность раз в 500 меньше, чем у Фобос-грунта.
Так что приходится карабкаться повыше.
Б.г.>> А где можно в даташите про их точность почитать?
То, что ты привёл - это НЕ ТО. Здесь нет стабильности самого гироскопа, насколько у него нуль плавает просто от жизни. Температурный коэффициент можно и скомпенсировать.
Xan> Очень не хотелось ещё и мерить температуру и для неё поправки писать.
Там проблема не в том, чтоб поправку написать, а в том, что воздействие температуры на термометр и резонатор гироскопа разнесены по времени (и очень сильно, десятки секунд).
Я сейчас точу зубы на ADXRS646-EP, обещают стабильность вдвое лучше (в пределах 12 градусов в час), чем у ADIS16300, но у них выход аналоговый.
Xan> Но при этом придётся закручивать, управлялка не справится.
Ясен перец - и вообще вся управлялка, кроме таймера и батарейки для пирочеки и запала верхней ступени, бросается нафиг!
Xan> 20 граммов с площадью около 1 дм — очень лёгкий.
А откуда 1 дм2 возьмётся?
Б.г.>> Фобос-грунт вон, последние витки по орбите с перигеем меньше 110 накручивал.
Xan> Он тяжёленький, топливо не израсходовано.
Xan> Плотность на 110 км и на 200 отличается в 1300 раз.
Да, это-то понятно...
Xan> У моего спутника плотность раз в 500 меньше, чем у Фобос-грунта.
Xan> Так что приходится карабкаться повыше.
Очень дорого выходит карабкаться выше, по массе ПГ по отношению к массе пустой последней ступени.
То, что ты привёл - это НЕ ТО. Здесь нет стабильности самого гироскопа, насколько у него нуль плавает просто от жизни. Температурный коэффициент можно и скомпенсировать.
Xan> Очень не хотелось ещё и мерить температуру и для неё поправки писать.
Там проблема не в том, чтоб поправку написать, а в том, что воздействие температуры на термометр и резонатор гироскопа разнесены по времени (и очень сильно, десятки секунд).
Я сейчас точу зубы на ADXRS646-EP, обещают стабильность вдвое лучше (в пределах 12 градусов в час), чем у ADIS16300, но у них выход аналоговый.
Xan> Но при этом придётся закручивать, управлялка не справится.
Ясен перец - и вообще вся управлялка, кроме таймера и батарейки для пирочеки и запала верхней ступени, бросается нафиг!
Xan> 20 граммов с площадью около 1 дм — очень лёгкий.
А откуда 1 дм2 возьмётся?
Б.г.>> Фобос-грунт вон, последние витки по орбите с перигеем меньше 110 накручивал.
Xan> Он тяжёленький, топливо не израсходовано.
Xan> Плотность на 110 км и на 200 отличается в 1300 раз.
Да, это-то понятно...
Xan> У моего спутника плотность раз в 500 меньше, чем у Фобос-грунта.
Xan> Так что приходится карабкаться повыше.
Очень дорого выходит карабкаться выше, по массе ПГ по отношению к массе пустой последней ступени.
Б.г.> То, что ты привёл - это НЕ ТО.
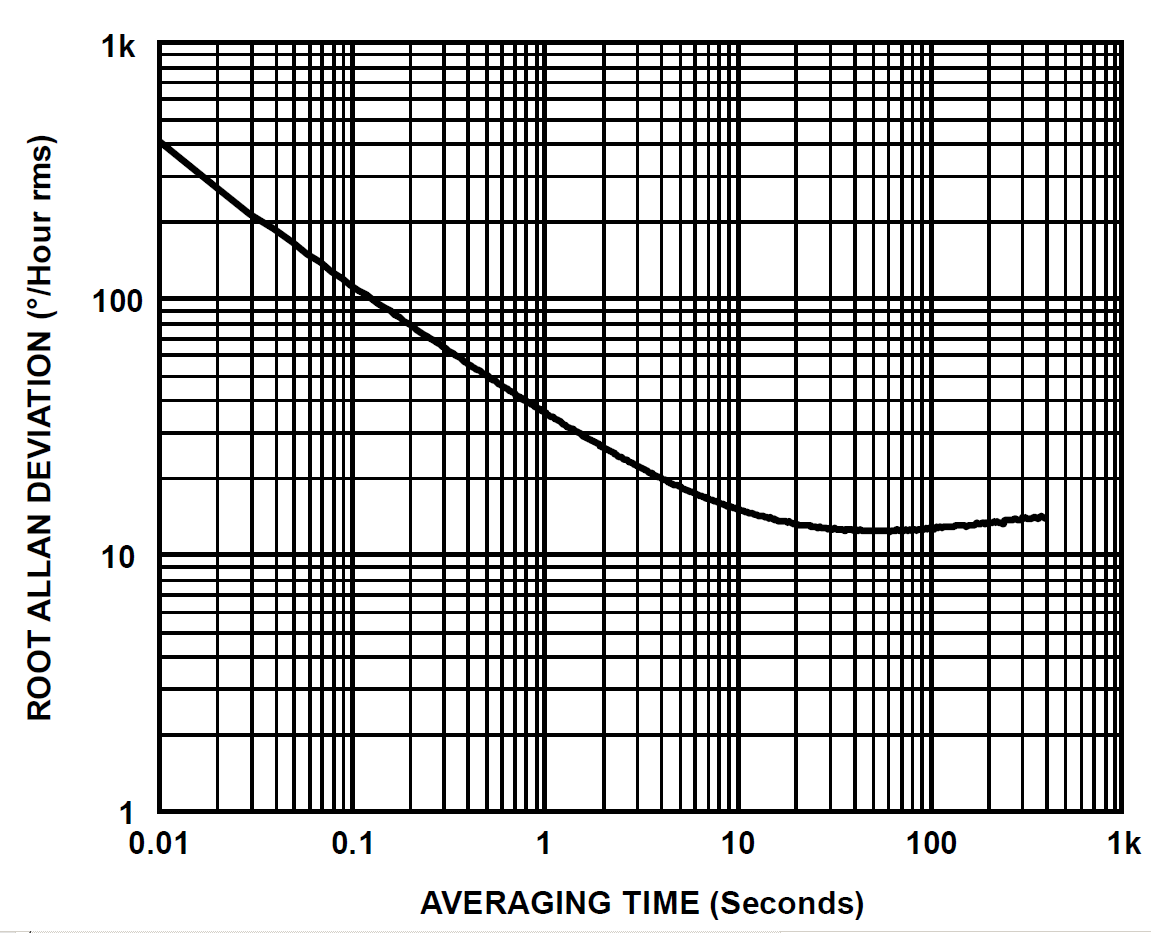
Так вот же: 0.03 dps/sqrt(Hz)
Из этого и получаются несколько градусов в час.
Порядок величины: 0.03 / sqrt(1/3600) = 1.8 градуса.
Б.г.> Я сейчас точу зубы на ADXRS646-EP, обещают стабильность вдвое лучше (в пределах 12 градусов в час), чем у ADIS16300, но у них выход аналоговый.
Xan>> Но при этом придётся закручивать, управлялка не справится.
Б.г.> Ясен перец - и вообще вся управлялка, кроме таймера и батарейки для пирочеки и запала верхней ступени, бросается нафиг!
Не, так нехорошо!
Думаю, после отработки предпоследней ступени посмотреть на скорость и предполагая, какой импульс даст последняя ступень, повернуть на некоторый угол (изменить наклонение), чтоб не превысить скорость для круговой орбиты.
Это если стабилизация закруткой.
Или повилять немного, если с непрерывным управлением.
Ну и на будущее — вернуть ценную электронику с орбиты.
Xan>> 20 граммов с площадью около 1 дм — очень лёгкий.
Б.г.> А откуда 1 дм2 возьмётся?
Солнечные батареи раскоряченные.
MPT3.6-150
Operating Voltage 3.6 V
Operating Current 100 mA
Typical Voc 4.8 V
Typical Isc 120 mA
Total Size 74 mm x 150 mm (2.9 in x 5.9 in)
Solar Module Aperture Size 60 mm x 150 mm (2.4 in x 5.9 in)
Total Thickness 0.2 mm (8 mil)
Weight 3.1 g (0.1 oz)
Парочка.
Б.г.> Очень дорого выходит карабкаться выше, по массе ПГ по отношению к массе пустой последней ступени.
У меня желание — чтоб разгон кончился в пределах радиовидимости. Это ещё связано с оптическим датчиком — далеко улететь, угол неудобный будет. Поэтому оптимальный вывод, когда последний импульс на другой стороне глобуса исключается.
Хочу закинуть сразу на нужную высоту недалеко от старта, а потом разгонять.
Около 1200 м/с на этом теряется, да.
Так вот же: 0.03 dps/sqrt(Hz)
Из этого и получаются несколько градусов в час.
Порядок величины: 0.03 / sqrt(1/3600) = 1.8 градуса.
Б.г.> Я сейчас точу зубы на ADXRS646-EP, обещают стабильность вдвое лучше (в пределах 12 градусов в час), чем у ADIS16300, но у них выход аналоговый.
Xan>> Но при этом придётся закручивать, управлялка не справится.
Б.г.> Ясен перец - и вообще вся управлялка, кроме таймера и батарейки для пирочеки и запала верхней ступени, бросается нафиг!
Не, так нехорошо!
Думаю, после отработки предпоследней ступени посмотреть на скорость и предполагая, какой импульс даст последняя ступень, повернуть на некоторый угол (изменить наклонение), чтоб не превысить скорость для круговой орбиты.
Это если стабилизация закруткой.
Или повилять немного, если с непрерывным управлением.
Ну и на будущее — вернуть ценную электронику с орбиты.
Xan>> 20 граммов с площадью около 1 дм — очень лёгкий.
Б.г.> А откуда 1 дм2 возьмётся?
Солнечные батареи раскоряченные.
MPT3.6-150
Operating Voltage 3.6 V
Operating Current 100 mA
Typical Voc 4.8 V
Typical Isc 120 mA
Total Size 74 mm x 150 mm (2.9 in x 5.9 in)
Solar Module Aperture Size 60 mm x 150 mm (2.4 in x 5.9 in)
Total Thickness 0.2 mm (8 mil)
Weight 3.1 g (0.1 oz)
Парочка.
Б.г.> Очень дорого выходит карабкаться выше, по массе ПГ по отношению к массе пустой последней ступени.
У меня желание — чтоб разгон кончился в пределах радиовидимости. Это ещё связано с оптическим датчиком — далеко улететь, угол неудобный будет. Поэтому оптимальный вывод, когда последний импульс на другой стороне глобуса исключается.
Хочу закинуть сразу на нужную высоту недалеко от старта, а потом разгонять.
Около 1200 м/с на этом теряется, да.
Б.г.>> То, что ты привёл - это НЕ ТО.
Xan> Так вот же: 0.03 dps/sqrt(Hz)
Xan> Из этого и получаются несколько градусов в час.
Xan> Порядок величины: 0.03 / sqrt(1/3600) = 1.8 градуса.
Нет. Смотри приложенный график. Эта величина отличает только за ту часть, которая линейно падает при увеличении времени усреднения. Но за горизонтальную и загибающуюся вверх часть отвечает другая характеристика, которая приведена у Аналога и не приведена у STM.
Xan> Так вот же: 0.03 dps/sqrt(Hz)
Xan> Из этого и получаются несколько градусов в час.
Xan> Порядок величины: 0.03 / sqrt(1/3600) = 1.8 градуса.
Нет. Смотри приложенный график. Эта величина отличает только за ту часть, которая линейно падает при увеличении времени усреднения. Но за горизонтальную и загибающуюся вверх часть отвечает другая характеристика, которая приведена у Аналога и не приведена у STM.
Прикреплённые файлы:
Xan> У меня желание — чтоб разгон кончился в пределах радиовидимости.
Ну у меня апогей первой ступени на 333 км от старта, при этом он на высоте 120 км, с радиовидимостью никаких проблем.
Xan> Это ещё связано с оптическим датчиком — далеко улететь, угол неудобный будет.
Далеко и не нужно. При типичных временах работы двигателей (даже у больших) работа второй ступени заканчивается на дальности около 1000 км, при высоте не меньше 200.
Xan> Поэтому оптимальный вывод, когда последний импульс на другой стороне глобуса исключается.
нет, там, как раз, обеспечить нужную точность закруткой несложно, ибо требуется меньше сотни метров в секунду, и промахнуться ими можно на десяток градусов. Делай спутник в форме бублика, и он будет крутиться устойчиво.
Xan> Хочу закинуть сразу на нужную высоту недалеко от старта, а потом разгонять.
Xan> Около 1200 м/с на этом теряется, да.
Щедро разбрасываешься с ростом числа ступеней надёжность падает очень быстро
Ну у меня апогей первой ступени на 333 км от старта, при этом он на высоте 120 км, с радиовидимостью никаких проблем.
Xan> Это ещё связано с оптическим датчиком — далеко улететь, угол неудобный будет.
Далеко и не нужно. При типичных временах работы двигателей (даже у больших) работа второй ступени заканчивается на дальности около 1000 км, при высоте не меньше 200.
Xan> Поэтому оптимальный вывод, когда последний импульс на другой стороне глобуса исключается.
нет, там, как раз, обеспечить нужную точность закруткой несложно, ибо требуется меньше сотни метров в секунду, и промахнуться ими можно на десяток градусов. Делай спутник в форме бублика, и он будет крутиться устойчиво.
Xan> Хочу закинуть сразу на нужную высоту недалеко от старта, а потом разгонять.
Xan> Около 1200 м/с на этом теряется, да.
Щедро разбрасываешься
с ростом числа ступеней надёжность падает очень быстро

Xan>> У моего спутника плотность раз в 500 меньше, чем у Фобос-грунта.
Xan>> Так что приходится карабкаться повыше.
Б.г.> Очень дорого выходит карабкаться выше, по массе ПГ по отношению к массе пустой последней ступени.
Про "наноспутники" уже писал (из собственного опыта проектирования и пуска). На 200 км (да ещё своей ракетой!!!) это для того, чтобы попробовать услышать "бип-бип". Даже с орбитой на 450 (был наш проект) км работоспособность аппарата ок. 2 месяцев. Cистема навигации + 3-осной ориентации + гироплатформа для установки камеры -viewer высокого разрешения выводит цену 10 кг аппарата за пределы коммерческой целесообразности.
Ракет для самовывода этих дорогих игрушек понапридумывали вдостоль. У меня целая папка подобрана. Могу поделиться. С ГРД и TVC для 1-2 ступеней. С 3 ступенями, стабилизированными вращением. С коммерческими навигационными платками и flight-computer. С теми же San Sensor.
Всё это благополучно ушло с горизонта лет 5 назад. А сейчас, кстати, в моде "horizontal launch technology", хорошо пережёванная из всевозможных 60-90 гг X-planes любительщина на основе 3D Design & Simulation. Ещё большая Хер-я. Но также позволяет подсасывать гранты. Хотя, конечно, та же DARPA своим делом занимается и, возможно, лет через 10 чего нибудь стоящее и появится из этой сегодняшней чепухи. А тот же Pegasus вполне добротно это делал и делает уже сейчас.
А вот как летали в 60 гг. Это опять фиг. из Manual for Orion II Rocket. Без всякого управления и электроники (таймер и то пружинный) летали на 100-300 км. Здесь видно, что разогнанная (3.5 м х 0.25м) до М4.5 ракета через 120 с полёта выводит полезную нагрузку на 120 км.
Xan>> Так что приходится карабкаться повыше.
Б.г.> Очень дорого выходит карабкаться выше, по массе ПГ по отношению к массе пустой последней ступени.
Про "наноспутники" уже писал (из собственного опыта проектирования и пуска). На 200 км (да ещё своей ракетой!!!) это для того, чтобы попробовать услышать "бип-бип". Даже с орбитой на 450 (был наш проект) км работоспособность аппарата ок. 2 месяцев. Cистема навигации + 3-осной ориентации + гироплатформа для установки камеры -viewer высокого разрешения выводит цену 10 кг аппарата за пределы коммерческой целесообразности.
Ракет для самовывода этих дорогих игрушек понапридумывали вдостоль. У меня целая папка подобрана. Могу поделиться. С ГРД и TVC для 1-2 ступеней. С 3 ступенями, стабилизированными вращением. С коммерческими навигационными платками и flight-computer. С теми же San Sensor.
Всё это благополучно ушло с горизонта лет 5 назад. А сейчас, кстати, в моде "horizontal launch technology", хорошо пережёванная из всевозможных 60-90 гг X-planes любительщина на основе 3D Design & Simulation. Ещё большая Хер-я. Но также позволяет подсасывать гранты. Хотя, конечно, та же DARPA своим делом занимается и, возможно, лет через 10 чего нибудь стоящее и появится из этой сегодняшней чепухи. А тот же Pegasus вполне добротно это делал и делает уже сейчас.
А вот как летали в 60 гг. Это опять фиг. из Manual for Orion II Rocket. Без всякого управления и электроники (таймер и то пружинный) летали на 100-300 км. Здесь видно, что разогнанная (3.5 м х 0.25м) до М4.5 ракета через 120 с полёта выводит полезную нагрузку на 120 км.
Прикреплённые файлы:

Б.г.> Нет. Смотри приложенный график.
Ну я что-то такое подозревал. Потому что у операционников аналогичная гадость на частотах в доли герца.
А вот причины "в школе не проходили".
Б.г.> нет, там, как раз, обеспечить нужную точность закруткой несложно, ибо требуется меньше сотни метров в секунду, и промахнуться ими можно на десяток градусов. Делай спутник в форме бублика, и он будет крутиться устойчиво.
Надо будет подумать.
Мысль давно бьётся насчёт приделать "самую последнюю ступень" для довывода. Заодно и скорость скорректировать можно будет правильно. На перекиси, что-ли, сделать. Сделать гибридник — шашка из марганцовки и в неё лить перекись.
Б.г.> Щедро разбрасываешься
У меня получилось, что предельный вес ракеты, которая ещё может выбраться из атмосферы, около 3 кг.
При больших массах вес полезной нагрузки меняется линейно со стартовым весом, а в области малых резко загибается к нулю.
Верно и обратное: при малых нагрузках изменение нагрузки увеличивает стартовый вес в меньшей степени, чем при больших нагрузках.
Поэтому не очень щедро.
Ну и не количестве оставшегося дома ПХА щястие!
Ну я что-то такое подозревал. Потому что у операционников аналогичная гадость на частотах в доли герца.
А вот причины "в школе не проходили".
Б.г.> нет, там, как раз, обеспечить нужную точность закруткой несложно, ибо требуется меньше сотни метров в секунду, и промахнуться ими можно на десяток градусов. Делай спутник в форме бублика, и он будет крутиться устойчиво.
Надо будет подумать.
Мысль давно бьётся насчёт приделать "самую последнюю ступень" для довывода. Заодно и скорость скорректировать можно будет правильно. На перекиси, что-ли, сделать. Сделать гибридник — шашка из марганцовки и в неё лить перекись.
Б.г.> Щедро разбрасываешься
У меня получилось, что предельный вес ракеты, которая ещё может выбраться из атмосферы, около 3 кг.
При больших массах вес полезной нагрузки меняется линейно со стартовым весом, а в области малых резко загибается к нулю.
Верно и обратное: при малых нагрузках изменение нагрузки увеличивает стартовый вес в меньшей степени, чем при больших нагрузках.
Поэтому не очень щедро.
Ну и не количестве оставшегося дома ПХА щястие!
Б.г.> с ростом числа ступеней надёжность падает очень быстро
У меня число ступеней ограничено снизу.
Две верхних — понятно, для разгона.
А нижние — чтоб сильно скорость звука не превышать, продираясь через атмосферу. Так как долгоиграющий двигатель не получается, то надо несколько короткоиграющих, чтоб паузами управлять скоростью.
Получается 4 нижних ступени, не меньше.
Иного 6.
У меня число ступеней ограничено снизу.
Две верхних — понятно, для разгона.
А нижние — чтоб сильно скорость звука не превышать, продираясь через атмосферу. Так как долгоиграющий двигатель не получается, то надо несколько короткоиграющих, чтоб паузами управлять скоростью.
Получается 4 нижних ступени, не меньше.
Иного 6.
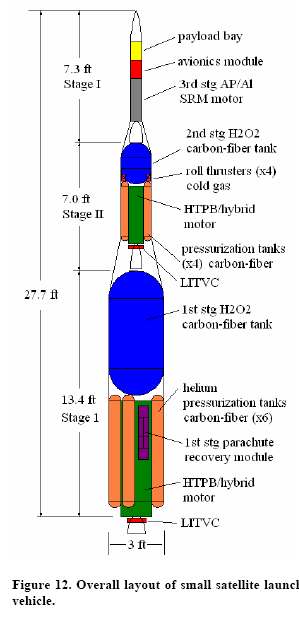
Xan> Иного 6.
Тут даже и 6 не нужно. 3 ступени. 1-2 на H2O2 полимер. Верняя на РДТТ. Время работы д.у. 120 с. Расчётный апогей -96 миль. Payload - 3 кг.
Тут даже и 6 не нужно. 3 ступени. 1-2 на H2O2 полимер. Верняя на РДТТ. Время работы д.у. 120 с. Расчётный апогей -96 миль. Payload - 3 кг.
Прикреплённые файлы:
Б.г.>> Нет. Смотри приложенный график.
Xan> Ну я что-то такое подозревал...
Xan> А вот причины "в школе не проходили".
Да и не во всяком "техвузе" проходят.
Классический белый шум - да, его спектр (мощности) равномерный и задается цифрой [B/Гц**(1\2)]. Он происходит как "тепловой", от хаоса в нагретых носителей зарядов (да простят меня за кухонную терминологию !).
А вот т.н. "тепловые пузыри" не имеют равномерной спектральной плотности (мощности).
Теоретически она бесконечно большая на "постоянном токе" - это тепловыделение электроники, а потом убывает обратно пропорционально квадрату или даже кубу частоты. Это "пузыри тепла" случайным образом отрываются от источника тепловыделения. Примерно так образуется пламя костра или бульки в электрочайнике.
Реализации итогового процесса интерпретируют как белый шум с ненулевым медленно меняющимся матожиданием.
Игра в "правильную" обработку заключается в правильном выборе частот среза фильтров - ФНЧ усредняет, вычищая шум на частотах выше частоты обновления данных, ФВЧ (это "высший пилотаж") давит дрейф матожидания на частотах ниже тех, на которых может меняться измеряемый параметр.
Пример: некоему летательному аппарату с "дрейфом нуля" в гироскопах 45...150 градусов в час удалось сократить оный до 4...8 градусов в час, исключив на входе интеграторов постоянную составляющую и все прочие составляющие, которые меняются медленнее чем с периодом 2...5 минут. Естественно, все возмущения и эволюции производятся быстрее чем с периодом 2...5 минут.
Xan> Ну я что-то такое подозревал...
Xan> А вот причины "в школе не проходили".
Да и не во всяком "техвузе" проходят.
Классический белый шум - да, его спектр (мощности) равномерный и задается цифрой [B/Гц**(1\2)]. Он происходит как "тепловой", от хаоса в нагретых носителей зарядов (да простят меня за кухонную терминологию !).
А вот т.н. "тепловые пузыри" не имеют равномерной спектральной плотности (мощности).
Теоретически она бесконечно большая на "постоянном токе" - это тепловыделение электроники, а потом убывает обратно пропорционально квадрату или даже кубу частоты. Это "пузыри тепла" случайным образом отрываются от источника тепловыделения. Примерно так образуется пламя костра или бульки в электрочайнике.
Реализации итогового процесса интерпретируют как белый шум с ненулевым медленно меняющимся матожиданием.
Игра в "правильную" обработку заключается в правильном выборе частот среза фильтров - ФНЧ усредняет, вычищая шум на частотах выше частоты обновления данных, ФВЧ (это "высший пилотаж") давит дрейф матожидания на частотах ниже тех, на которых может меняться измеряемый параметр.
Пример: некоему летательному аппарату с "дрейфом нуля" в гироскопах 45...150 градусов в час удалось сократить оный до 4...8 градусов в час, исключив на входе интеграторов постоянную составляющую и все прочие составляющие, которые меняются медленнее чем с периодом 2...5 минут. Естественно, все возмущения и эволюции производятся быстрее чем с периодом 2...5 минут.
Ckona> Игра в "правильную" обработку заключается в правильном выборе частот среза фильтров - ФНЧ усредняет, вычищая шум на частотах выше частоты обновления данных, ФВЧ (это "высший пилотаж") давит дрейф матожидания на частотах ниже тех, на которых может меняться измеряемый параметр.
Ckona> Пример: некоему летательному аппарату с "дрейфом нуля" в гироскопах 45...150 градусов в час удалось сократить оный до 4...8 градусов в час, исключив на входе интеграторов постоянную составляющую и все прочие составляющие, которые меняются медленнее чем с периодом 2...5 минут. Естественно, все возмущения и эволюции производятся быстрее чем с периодом 2...5 минут.
Может, поделишься реализацией такого фвч? в цифре, ессно... или алгоритм секретный?
Реально, у меня получается, что я, как раз, попадаю в перегиб этой характеристики - время активного участка, включая баллистическую паузу, построение ориентации по Солнцу и работу двух верхних ступеней, в худшем случае 330 секунд. В типовом - 305.
Ckona> Пример: некоему летательному аппарату с "дрейфом нуля" в гироскопах 45...150 градусов в час удалось сократить оный до 4...8 градусов в час, исключив на входе интеграторов постоянную составляющую и все прочие составляющие, которые меняются медленнее чем с периодом 2...5 минут. Естественно, все возмущения и эволюции производятся быстрее чем с периодом 2...5 минут.
Может, поделишься реализацией такого фвч? в цифре, ессно... или алгоритм секретный?
Реально, у меня получается, что я, как раз, попадаю в перегиб этой характеристики - время активного участка, включая баллистическую паузу, построение ориентации по Солнцу и работу двух верхних ступеней, в худшем случае 330 секунд. В типовом - 305.
Xan> А нижние — чтоб сильно скорость звука не превышать,
Это чтоб не пререгреться?
Это чтоб не пререгреться?

Xan>> А нижние — чтоб сильно скорость звука не превышать,
RocKI> Это чтоб не пререгреться?
Да. Иначе надо обтекатель тяжёлый.
Из чугуния!
При скорости 700 м/с ещё вполне "пластмассовая" температура, а при 900 уже за 300, даже с учётом, что наверху холодно.
Кроме головы ещё могут нагреться движки верхних ступеней (боковая поверхность) и начать гореть нерасчётно.
RocKI> Это чтоб не пререгреться?
Да. Иначе надо обтекатель тяжёлый.
Из чугуния!
При скорости 700 м/с ещё вполне "пластмассовая" температура, а при 900 уже за 300, даже с учётом, что наверху холодно.
Кроме головы ещё могут нагреться движки верхних ступеней (боковая поверхность) и начать гореть нерасчётно.
Реклама Google — средство выживания форумов :)
Ckona>> ... некоему летательному аппарату ...
Б.г.> Может, поделишься реализацией такого фвч? ... или алгоритм секретный?
Это типа некая конспирация началась? Или не заканчивалась? Какие-то намёки прозрачные, ролики непонятные... Чуть что конкретное спросят - молчок... Тоскливо, однако. Вот человек ссылку на пятисекундный "ролик" привёл - мотается камера, и в кадр раза два попадает какой-то самолётик, судя по всему модель. И на что оно? Считай, что заинтриговал. Продолжение будет?
Б.г.> Может, поделишься реализацией такого фвч? ... или алгоритм секретный?
Это типа некая конспирация началась? Или не заканчивалась? Какие-то намёки прозрачные, ролики непонятные... Чуть что конкретное спросят - молчок... Тоскливо, однако. Вот человек ссылку на пятисекундный "ролик" привёл - мотается камера, и в кадр раза два попадает какой-то самолётик, судя по всему модель. И на что оно? Считай, что заинтриговал. Продолжение будет?
Copyright © Balancer 1997..2022
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
