-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
 Ckona
Ckona

Б.г.> Может, поделишься реализацией такого фвч? в цифре, ессно...
Написал в личку.
Написал в личку.


 инфо
инфо инструменты
инструменты
 Бывший генералиссимус
Бывший генералиссимус

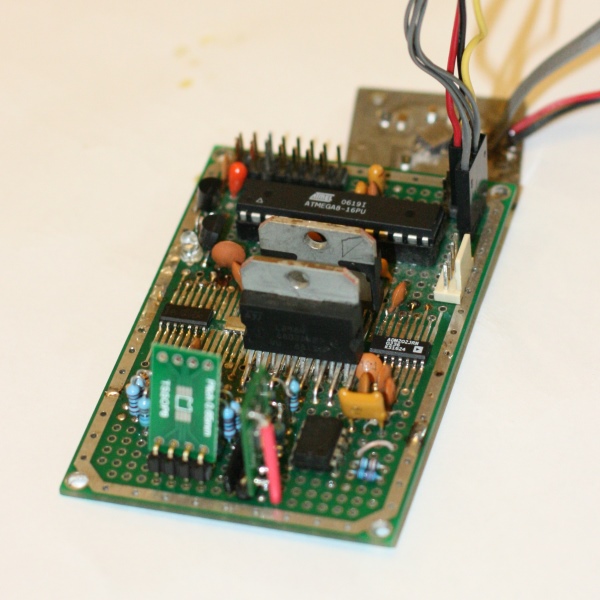
Время поднять тему. На фото ниже - почти доделанный, но не запрограммированный трёхосный угловой стабилизатор. Датчики - EPSON XV-3700, самые точные из "дармовых". В центре платы возвышаются две L298, которые будут крутить 4 коллекторных моторчика. Контроллер - ATMEGA8, к сожалению, у него только 3 ШИМ выхода, причём третий конфликтует по сигналам с SPI. Поэтому, собственно, гироскопы аналоговые.
Третий гироскоп пока не припаян, плата-переходник символизирует, где он будет. Сзади видна платка с акселерометром ADXL210E, её когда-то для меня сделал Ignis Caelum.
Большой штыревой разъём на заднем плане - питание всей системы и моторы. Маленький беленький - COM-порт для отладки (а в лётном варианте - для радиоканала).
Третий гироскоп пока не припаян, плата-переходник символизирует, где он будет. Сзади видна платка с акселерометром ADXL210E, её когда-то для меня сделал Ignis Caelum.
Большой штыревой разъём на заднем плане - питание всей системы и моторы. Маленький беленький - COM-порт для отладки (а в лётном варианте - для радиоканала).
Прикреплённые файлы:

 Xan
Xan

Б.г.> к сожалению, у него только 3 ШИМ выхода
Вот я думаю поставить рядом второй МК, чтоб железных шимов на всё хватило.
Места он займёт немного, зато сразу снимается проблема деланья программных шимов.
Вот я думаю поставить рядом второй МК, чтоб железных шимов на всё хватило.
Места он займёт немного, зато сразу снимается проблема деланья программных шимов.
Б.г.>> к сожалению, у него только 3 ШИМ выхода
Xan> Вот я думаю поставить рядом второй МК, чтоб железных шимов на всё хватило.
Xan> Места он займёт немного, зато сразу снимается проблема деланья программных шимов.
Я не буду делать программный ШИМ, тангажные рули будут отклоняться одинаково. Крен и рыскание - дифференциально и синфазно соответственно. Как у Фау-2, короче. 3 ШИМа - 4 мотора.
Xan> Вот я думаю поставить рядом второй МК, чтоб железных шимов на всё хватило.
Xan> Места он займёт немного, зато сразу снимается проблема деланья программных шимов.
Я не буду делать программный ШИМ, тангажные рули будут отклоняться одинаково. Крен и рыскание - дифференциально и синфазно соответственно. Как у Фау-2, короче. 3 ШИМа - 4 мотора.
Б.г.> Время поднять тему...
А почему ты хочешь делать привода на «рассыпухе» а не на готовых машинках.
А почему ты хочешь делать привода на «рассыпухе» а не на готовых машинках.


Б.г.>> Время поднять тему...
LEVSHA> А почему ты хочешь делать привода на «рассыпухе» а не на готовых машинках.
Готовых - это каких? с ШИМ входом? Не доверяю я им.
LEVSHA> А почему ты хочешь делать привода на «рассыпухе» а не на готовых машинках.
Готовых - это каких? с ШИМ входом? Не доверяю я им.
Б.г.> Готовых - это каких? с ШИМ входом?
Да.
Б.г.> Не доверяю я им.
Дело конечно хозяйское, но если вопрос только в надежности, то это перегиб.
1. По качеству есть очень разные ну и по цене соответственно.")
2. Столько моделистов их топчут и в основном довольны.
3. Несколько разных разбирал сам, из недорогих. Могу, как приводчик сказать сделаны вполне нормально, если конечно не говорить о сотнях часов наработки на отказ.
На следующую неделю планирую подобрать себе и заказать.
Да.
Б.г.> Не доверяю я им.
Дело конечно хозяйское, но если вопрос только в надежности, то это перегиб.
1. По качеству есть очень разные ну и по цене соответственно.
2. Столько моделистов их топчут и в основном довольны.
3. Несколько разных разбирал сам, из недорогих. Могу, как приводчик сказать сделаны вполне нормально, если конечно не говорить о сотнях часов наработки на отказ.
На следующую неделю планирую подобрать себе и заказать.
Б.г.>> Готовых - это каких? с ШИМ входом?
LEVSHA> Да.
Б.г.>> Не доверяю я им.
LEVSHA> Дело конечно хозяйское, но если вопрос только в надежности, то это перегиб.
Не в надёжности дело, а в динамических параметрах. Вот я скачком меняю скважность на входе. Руль же не повернётся скачком? Он будет разгоняться, двигаться с какой-то скоростью, потом тормозиться, потом остановится. В паспорте машинки есть её ФЧХ? Как мне узнать форму переходного процесса при разгоне и стопе? Есть у неё перерегулирование и выбег, или там апериодические переходные процессы?
Если мне не хватает скорости, я всегда могу поднять питание на моторах, а в готовой РМ при этом поднимется и питание на электронике. Как узнать, при каком напряжении она сдохнет?
LEVSHA> 1. По качеству есть очень разные ну и по цене соответственно.
LEVSHA> 2. Столько моделистов их топчут и в основном довольны.
Потому что руками рулят, там есть свои тонкости.
LEVSHA> Да.
Б.г.>> Не доверяю я им.
LEVSHA> Дело конечно хозяйское, но если вопрос только в надежности, то это перегиб.
Не в надёжности дело, а в динамических параметрах. Вот я скачком меняю скважность на входе. Руль же не повернётся скачком? Он будет разгоняться, двигаться с какой-то скоростью, потом тормозиться, потом остановится. В паспорте машинки есть её ФЧХ? Как мне узнать форму переходного процесса при разгоне и стопе? Есть у неё перерегулирование и выбег, или там апериодические переходные процессы?
Если мне не хватает скорости, я всегда могу поднять питание на моторах, а в готовой РМ при этом поднимется и питание на электронике. Как узнать, при каком напряжении она сдохнет?
LEVSHA> 1. По качеству есть очень разные ну и по цене соответственно.
LEVSHA> 2. Столько моделистов их топчут и в основном довольны.
Потому что руками рулят, там есть свои тонкости.
Б.г.> Не в надёжности дело, а в динамических параметрах...
О приводе я могу говорить бесконечно – тяга у меня к нему.
По твоим рассуждениям есть уточнения.
Но так как я не знаю насколько тебе это интересно «грузить» тебя не хочу.
Если тебя дискуссия по приводу интересует, скажи, с удовольствием поделюсь опытом.
О приводе я могу говорить бесконечно – тяга у меня к нему.
По твоим рассуждениям есть уточнения.
Но так как я не знаю насколько тебе это интересно «грузить» тебя не хочу.
Если тебя дискуссия по приводу интересует, скажи, с удовольствием поделюсь опытом.
Б.г.>> Не в надёжности дело, а в динамических параметрах...
LEVSHA> О приводе я могу говорить бесконечно – тяга у меня к нему.
LEVSHA> По твоим рассуждениям есть уточнения.
LEVSHA> Но так как я не знаю насколько тебе это интересно «грузить» тебя не хочу.
Если у меня не заработает, придётся прибегнуть к чужому опыту Но пока надеюсь сам справиться. Насчёт уточнений - пиши, тема не переполнена постингами. На своих РМ я проверял переходные характеристики и т.д. Дешёвые моторчики от игрушек работают только на столе. Скорость реверсирования тем больше, чем длиннее и тоньше моторчик, тут никто америки не откроет.
LEVSHA> Если тебя дискуссия по приводу интересует, скажи, с удовольствием поделюсь опытом.
Ну, колись!
LEVSHA> О приводе я могу говорить бесконечно – тяга у меня к нему.
LEVSHA> По твоим рассуждениям есть уточнения.
LEVSHA> Но так как я не знаю насколько тебе это интересно «грузить» тебя не хочу.
Если у меня не заработает, придётся прибегнуть к чужому опыту
Но пока надеюсь сам справиться. Насчёт уточнений - пиши, тема не переполнена постингами. На своих РМ я проверял переходные характеристики и т.д. Дешёвые моторчики от игрушек работают только на столе. Скорость реверсирования тем больше, чем длиннее и тоньше моторчик, тут никто америки не откроет.LEVSHA> Если тебя дискуссия по приводу интересует, скажи, с удовольствием поделюсь опытом.
Ну, колись!
Б.г.> Вот я скачком меняю скважность на входе. Руль же не повернётся скачком? Он будет разгоняться, двигаться с какой-то скоростью, потом тормозиться, потом остановится.
Согласен. А ты уверен, что привод, который ты сделаешь, будет шустрее.
Б.г.> В паспорте машинки есть её ФЧХ? Как мне узнать форму переходного процесса при разгоне и стопе? Есть у неё перерегулирование и выбег, или там апериодические переходные процессы?
Ели вопрос в этом можно поступить следующим образом – во всяком случае, я буду делать примерно так, на выходной вал исполняющей машинки насаживаем маховик или коромысло с грузом, пружиной и датчик угла поворота на эффекте холла и смотрим.
Но самое главное нужно примерно определиться с постоянной времени объекта к управляющему усилию. Например, я думаю, что реальную МБР можно подруливать с секундной задержкой.
Согласен. А ты уверен, что привод, который ты сделаешь, будет шустрее.
Б.г.> В паспорте машинки есть её ФЧХ? Как мне узнать форму переходного процесса при разгоне и стопе? Есть у неё перерегулирование и выбег, или там апериодические переходные процессы?
Ели вопрос в этом можно поступить следующим образом – во всяком случае, я буду делать примерно так, на выходной вал исполняющей машинки насаживаем маховик или коромысло с грузом, пружиной и датчик угла поворота на эффекте холла и смотрим.
Но самое главное нужно примерно определиться с постоянной времени объекта к управляющему усилию. Например, я думаю, что реальную МБР можно подруливать с секундной задержкой.
Б.г.> На своих РМ я проверял переходные характеристики и т.д. Дешёвые моторчики от игрушек работают только на столе.
То есть насколько я понимаю те мотор редукторы, с которыми ты экспериментировал, тебя не устраивают.
Тогда если не тяжело напиши некоторые параметры переходных процессов - приблизительно, если ты их замерял.
1. Время разгона с места до ~70-80% максимальных оборотов.
2. Время реверса с ~70-80% оборотов в одну сторону до ~70-80% в другую.
Если не секрет, какие моторы и мотор редукторы собираешься применять?
Б.г.> Скорость реверсирования тем больше, чем длиннее и тоньше моторчик, тут никто америки не откроет.
Строго говоря, это соотношение крутящего момента к инерции ротора.
Плюс индуктивность ротора.
Но сейчас настолько разные моторы, что бывает по-разному.
Например, двигатели с развернутым ротором очень динамичные, а ротор очень большого диаметра, но легкий и практически безиндуктивный.
То есть насколько я понимаю те мотор редукторы, с которыми ты экспериментировал, тебя не устраивают.
Тогда если не тяжело напиши некоторые параметры переходных процессов - приблизительно, если ты их замерял.
1. Время разгона с места до ~70-80% максимальных оборотов.
2. Время реверса с ~70-80% оборотов в одну сторону до ~70-80% в другую.
Если не секрет, какие моторы и мотор редукторы собираешься применять?
Б.г.> Скорость реверсирования тем больше, чем длиннее и тоньше моторчик, тут никто америки не откроет.
Строго говоря, это соотношение крутящего момента к инерции ротора.
Плюс индуктивность ротора.
Но сейчас настолько разные моторы, что бывает по-разному.
Например, двигатели с развернутым ротором очень динамичные, а ротор очень большого диаметра, но легкий и практически безиндуктивный.
LEVSHA> Согласен. А ты уверен, что привод, который ты сделаешь, будет шустрее.
Его поведение предсказуемее. Для машинки с неизвестной электроникой больше комбинаций, которые нужно проверять, и больше "завязок" одних факторов на другие, на которые я не могу влиять.
LEVSHA> Ели вопрос в этом можно поступить следующим образом – во всяком случае, я буду делать примерно так, на выходной вал исполняющей машинки насаживаем маховик или коромысло с грузом, пружиной и датчик угла поворота на эффекте холла и смотрим.
Слишком много сочетаний. Например, у ЖК дисплеев выяснилось, что переход "серый-серый" идёт куда медленнее, чем переход "чёрный-белый" или "белый-чёрный". У моторчика, которым я рулю напрямую, сочетаний, которые нужно проверить, гораздо меньше. Хотя сами шестерёнки я бы и использовал от какой-нибудь хорошей рулевой машинки.
LEVSHA> Но самое главное нужно примерно определиться с постоянной времени объекта к управляющему усилию. Например, я думаю, что реальную МБР можно подруливать с секундной задержкой.
В общем случае - нельзя. В частном случае РН "Энергия" в первом полёте имела рулевые приводы, заарретированные на время порядка секунды от КП, и совершила "кивок" по тангажу градусов на 25. Во втором полёте время арретирования уменьшили вчетверо.
У моей любимой 8К84 для проверки ФЧХ рулевых приводов на вход подавалось управляющее напряжение частотой 0,7 Гц, и сдвиг фазы на этой частоте должен был быть не меньше 10 и не больше 20 градусов.
а для "маленькой" ракеты всё нужно существенно быстрее.
Его поведение предсказуемее. Для машинки с неизвестной электроникой больше комбинаций, которые нужно проверять, и больше "завязок" одних факторов на другие, на которые я не могу влиять.
LEVSHA> Ели вопрос в этом можно поступить следующим образом – во всяком случае, я буду делать примерно так, на выходной вал исполняющей машинки насаживаем маховик или коромысло с грузом, пружиной и датчик угла поворота на эффекте холла и смотрим.
Слишком много сочетаний. Например, у ЖК дисплеев выяснилось, что переход "серый-серый" идёт куда медленнее, чем переход "чёрный-белый" или "белый-чёрный". У моторчика, которым я рулю напрямую, сочетаний, которые нужно проверить, гораздо меньше. Хотя сами шестерёнки я бы и использовал от какой-нибудь хорошей рулевой машинки.
LEVSHA> Но самое главное нужно примерно определиться с постоянной времени объекта к управляющему усилию. Например, я думаю, что реальную МБР можно подруливать с секундной задержкой.
В общем случае - нельзя. В частном случае РН "Энергия" в первом полёте имела рулевые приводы, заарретированные на время порядка секунды от КП, и совершила "кивок" по тангажу градусов на 25. Во втором полёте время арретирования уменьшили вчетверо.
У моей любимой 8К84 для проверки ФЧХ рулевых приводов на вход подавалось управляющее напряжение частотой 0,7 Гц, и сдвиг фазы на этой частоте должен был быть не меньше 10 и не больше 20 градусов.
а для "маленькой" ракеты всё нужно существенно быстрее.
LEVSHA> 1. Время разгона с места до ~70-80% максимальных оборотов.
от 0 до 90 градусов в секунду выходного вала - 0,2 секунды (среднее из 20 попыток). При питании от 3 банок литий-ионного аккумулятора.
LEVSHA> 2. Время реверса с ~70-80% оборотов в одну сторону до ~70-80% в другую.
0,35-0,4 секунды.
LEVSHA> Если не секрет, какие моторы и мотор редукторы собираешься применять?
их фото было тут уже несколько раз Моторы и редукторы от приводов китайских камер видеонаблюдения.
от 0 до 90 градусов в секунду выходного вала - 0,2 секунды (среднее из 20 попыток). При питании от 3 банок литий-ионного аккумулятора.
LEVSHA> 2. Время реверса с ~70-80% оборотов в одну сторону до ~70-80% в другую.
0,35-0,4 секунды.
LEVSHA> Если не секрет, какие моторы и мотор редукторы собираешься применять?
их фото было тут уже несколько раз Моторы и редукторы от приводов китайских камер видеонаблюдения.
Б.г.> 0,35-0,4 секунды.
Да с такими цифрами не полетаешь – медленно.
Б.г.> их фото было тут уже несколько раз Моторы и редукторы от приводов китайских камер видеонаблюдения.
Тут мне ситуация не совсем понятна вместо специализированных приводов пусть и модельных ты берешь привод камеры у которого совершенно другая задача. Не нравится электроника машинок, выкинь, оставь электромеханику.
Вот видео, посмотри на правую машинку она конечно дорогая, но можно будет потом сравнивать со своими результатами.
Да с такими цифрами не полетаешь – медленно.
Б.г.>
их фото было тут уже несколько раз Моторы и редукторы от приводов китайских камер видеонаблюдения.Тут мне ситуация не совсем понятна вместо специализированных приводов пусть и модельных ты берешь привод камеры у которого совершенно другая задача. Не нравится электроника машинок, выкинь, оставь электромеханику.
Вот видео, посмотри на правую машинку она конечно дорогая, но можно будет потом сравнивать со своими результатами.
Б.г.>> 0,35-0,4 секунды.
LEVSHA> Да с такими цифрами не полетаешь – медленно.
Вообще-то я пока алгоритмы отлаживаю И ничего так, отлаживаются
Б.г.>> их фото было тут уже несколько раз Моторы и редукторы от приводов китайских камер видеонаблюдения.
LEVSHA> Тут мне ситуация не совсем понятна вместо специализированных приводов пусть и модельных ты берешь привод камеры у которого совершенно другая задача.
больше момент и меньше скорость.
LEVSHA> Не нравится электроника машинок, выкинь, оставь электромеханику.
Те машинки, что меня устраивают по моменту, стоят совершенно немыслимых для опытов денег. Дойдёт дело до реального планера - посмотрим.
LEVSHA> Да с такими цифрами не полетаешь – медленно.
Вообще-то я пока алгоритмы отлаживаю
И ничего так, отлаживаются Б.г.>>
их фото было тут уже несколько раз Моторы и редукторы от приводов китайских камер видеонаблюдения.LEVSHA> Тут мне ситуация не совсем понятна вместо специализированных приводов пусть и модельных ты берешь привод камеры у которого совершенно другая задача.
больше момент и меньше скорость.
LEVSHA> Не нравится электроника машинок, выкинь, оставь электромеханику.
Те машинки, что меня устраивают по моменту, стоят совершенно немыслимых для опытов денег. Дойдёт дело до реального планера - посмотрим.
LEVSHA> Вот видео, посмотри на правую машинку она конечно дорогая, но можно будет потом сравнивать со своими результатами.
А вот у левой перерегулирование очень даже заметное... И на медленном движении обе дёргаются. Не так чтобы ой-ой, но видно.
А вот у левой перерегулирование очень даже заметное... И на медленном движении обе дёргаются. Не так чтобы ой-ой, но видно.
Б.г.> А вот у левой перерегулирование очень даже заметное.
Да – наверно это плата за быстродействие с учетом реальных составляющих.
Да – наверно это плата за быстродействие с учетом реальных составляющих.

Semenov
втянувшийся
Б.г.>> к сожалению, у него только 3 ШИМ выхода
Xan> Вот я думаю поставить рядом второй МК, чтоб железных шимов на всё хватило.
Друзья!!!! на дворе 2013 год все же.
Вместо ATmega8 легко ставится в панельку такие же по ногам но с 6 ШИМ мега88 или с удвоеной памятью мега168 или с учетверенной памятью мега328. Или с половинкой памяти мега48
Кстати у этих контроллеров еще и прерывания почти на всех ногах понавешаны
Xan> Вот я думаю поставить рядом второй МК, чтоб железных шимов на всё хватило.
Друзья!!!! на дворе 2013 год все же.
Вместо ATmega8 легко ставится в панельку такие же по ногам но с 6 ШИМ мега88 или с удвоеной памятью мега168 или с учетверенной памятью мега328. Или с половинкой памяти мега48
Кстати у этих контроллеров еще и прерывания почти на всех ногах понавешаны

Это сообщение редактировалось 18.09.2013 в 11:20
Semenov
втянувшийся
Б.г.> Те машинки, что меня устраивают по моменту, стоят совершенно немыслимых для опытов денег. Дойдёт дело до реального планера - посмотрим.
Может использовать самодельные приводы - 2 катушки без сердечника в которых будет качаться сильный магнит-якорь. У тебя же угол качания небольшой? 298 позволяют использовать высокое напряжение питания, т.е. мощность на моторы может быть приличной.
Может использовать самодельные приводы - 2 катушки без сердечника в которых будет качаться сильный магнит-якорь. У тебя же угол качания небольшой? 298 позволяют использовать высокое напряжение питания, т.е. мощность на моторы может быть приличной.
Semenov> Друзья!!!! на дворе 2013 год все же.
Semenov> Вместо ATmega8...
Ты с такими высказываниями осторожнее, а то примут за еретика и как меня полтора года назад «выпорют».
Semenov> Может использовать самодельные приводы - 2 катушки без сердечника в которых будет качаться сильный магнит-якорь.
У такой системы есть существенный недостаток.
Так как магнит будет перемещаться в катушках относительно медленно, КПД механизма будет стремиться к «0». И для создания большого усилия будет требоваться приличная мощность от источника питания.
Semenov> Вместо ATmega8...
Ты с такими высказываниями осторожнее, а то примут за еретика и как меня полтора года назад «выпорют».
Semenov> Может использовать самодельные приводы - 2 катушки без сердечника в которых будет качаться сильный магнит-якорь.
У такой системы есть существенный недостаток.
Так как магнит будет перемещаться в катушках относительно медленно, КПД механизма будет стремиться к «0». И для создания большого усилия будет требоваться приличная мощность от источника питания.
Semenov> Кстати у этих контроллеров еще и прерывания почти на всех ногах понавешаны
Вот с прерываниями в БЦВМ ракет, даже игрушечных, надо быть очень осторожными. Это тема не для форума, но, могу сказать, что даже одноуровневые прерывания нежелательны для верификации кода, а вложенные разноуровневые - безусловное табу.
Вот с прерываниями в БЦВМ ракет, даже игрушечных, надо быть очень осторожными. Это тема не для форума, но, могу сказать, что даже одноуровневые прерывания нежелательны для верификации кода, а вложенные разноуровневые - безусловное табу.
Semenov
втянувшийся
Прерывания аппаратно есть,, а использовать их не обязательно конечно. Хотя я не представляю как без них совсем.
Б.г.> У моей любимой 8К84 для проверки ФЧХ рулевых приводов на вход подавалось управляющее напряжение частотой 0,7 Гц, и сдвиг фазы на этой частоте должен был быть не меньше 10 и не больше 20 градусов. а для "маленькой" ракеты всё нужно существенно быстрее.
Стратегическая ракета 8к84. Учи матчасть похоже УР-100
Думаю при малой скорости больших рулей можно дабавить малые но быстрые рули.
Напомни пожалуйста параметры твоих рулей - либо размеры и вес либо момент инерции и какие параметры динамические требуются. Мне очень интересно. Может сделаю болванку аналогичную да покрутить попробую.
А ведь крутить электроприводы рулей можно модельным контроллером бесколлекторника - регулятор хода - там 3 мощных полумоста и почти всегда atmega8 или 88 168 - ее можно прошить своей прошивкой. Честно говоря L298 это "кипятильник" при низковольтном питании - при 2 А там на ключах 4 вольта будет падать - 8 Вт. Ан а двух каналах микрухи 16 Вт.
Б.г.> У моей любимой 8К84 для проверки ФЧХ рулевых приводов на вход подавалось управляющее напряжение частотой 0,7 Гц, и сдвиг фазы на этой частоте должен был быть не меньше 10 и не больше 20 градусов. а для "маленькой" ракеты всё нужно существенно быстрее.
Стратегическая ракета 8к84. Учи матчасть похоже УР-100
Думаю при малой скорости больших рулей можно дабавить малые но быстрые рули.
Напомни пожалуйста параметры твоих рулей - либо размеры и вес либо момент инерции и какие параметры динамические требуются. Мне очень интересно. Может сделаю болванку аналогичную да покрутить попробую.
А ведь крутить электроприводы рулей можно модельным контроллером бесколлекторника - регулятор хода - там 3 мощных полумоста и почти всегда atmega8 или 88 168 - ее можно прошить своей прошивкой. Честно говоря L298 это "кипятильник" при низковольтном питании - при 2 А там на ключах 4 вольта будет падать - 8 Вт. Ан а двух каналах микрухи 16 Вт.
Semenov
втянувшийся
Некоторые цифры по потребной динамике рулей можно взять в патенте - "ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА"

И в сети надо найти PDF с дипломной работой схожей тематикой там есть данные практических испытаний на ракете типа птур "Метис".
Воздушно-динамический блок рулевого привода управляемого снаряда. Патент РФ 2237857
(54) ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА (57) Реферат: Изобретение относится к оборонной технике, к управляемым снарядам и ракетам. В воздушно-динамическом блоке рулевого привода управляемого снаряда, содержащем рули и рулевые машины с электромагнитным пневмораспределителем клапанного типа, включающим в себя электромагнит с подпружиненным якорем, служащим одновременно клапаном, якорь выполнен переменной толщины, определяемой из соотношения hi=Smin/di, где di, hi -диаметр i-го поперечного сечения якоря, перпендикулярного его оси и толщина якоря до плоскости данного сечения; Smin - площадь минимального поперечного сечения магнитопровода электромагнита по цепи основного магнитного потока, создаваемого обмоткой управления электромагнита. // Дальше — www.findpatent.ruИ в сети надо найти PDF с дипломной работой схожей тематикой там есть данные практических испытаний на ракете типа птур "Метис".
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
