 SashaMaks
SashaMaks

 инфо
инфо инструменты
инструменты



 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
SashaMaks>> А я уже попробовал пропустить через свой алгоритм:
Б.г.> Ну, что, мы слетали второй раз!
А данные в цифрах будут?
Б.г.> Ну, что, мы слетали второй раз!
А данные в цифрах будут?



SashaMaks>>> А я уже попробовал пропустить через свой алгоритм:
Б.г.>> Ну, что, мы слетали второй раз!
SashaMaks> А данные в цифрах будут?
ща, секунду!
Б.г.>> Ну, что, мы слетали второй раз!
SashaMaks> А данные в цифрах будут?
ща, секунду!

SashaMaks>>> А я уже попробовал пропустить через свой алгоритм:
Б.г.>> Ну, что, мы слетали второй раз!
SashaMaks> А данные в цифрах будут?
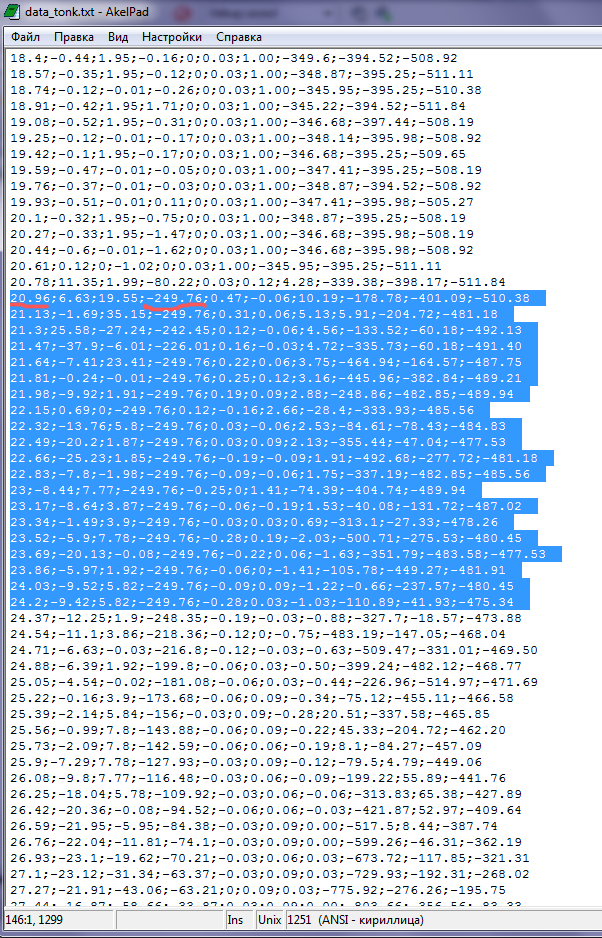
Вот они. шаг по времени - 1/819,2 секунды. первые три колонки - угловые скорости в единицах 1/400 градуса в секунду (т.е. 32000 - это 80 градусов в секунду, -32000 - это -80 градусов в секунду).
Зашкал по крену был, но уже во время падения. Падала ракета практически горизонтально, и после первого удара катилась (повернулась на примерно 60 градусов).
На графике ускорения виден момент первого удара, момент облома второго руля и момент выброса парашюта (12 секунд от начала записи).
Ускорения - 1 же равно 4010. Т.е. 16000 - это почти 4 же. Ось Z направлена против полёта.
Б.г.>> Ну, что, мы слетали второй раз!
SashaMaks> А данные в цифрах будут?
Вот они. шаг по времени - 1/819,2 секунды. первые три колонки - угловые скорости в единицах 1/400 градуса в секунду (т.е. 32000 - это 80 градусов в секунду, -32000 - это -80 градусов в секунду).
Зашкал по крену был, но уже во время падения. Падала ракета практически горизонтально, и после первого удара катилась (повернулась на примерно 60 градусов).
На графике ускорения виден момент первого удара, момент облома второго руля и момент выброса парашюта (12 секунд от начала записи).
Ускорения - 1 же равно 4010. Т.е. 16000 - это почти 4 же. Ось Z направлена против полёта.
Прикреплённые файлы:
flight2.zip (скачать)
[140 кБ]
Это сообщение редактировалось 18.08.2015 в 23:28

Б.г.> Ролики будут, видимо, в понедельник. Их делают Лин сотоварищи. Моё дело - гироскоп, рулевые машинки, и то, что между ними ")
Сайт вашей компании (spacelin.ru) с телефона не отражается корректно.
По крайней мере новости.
Сайт вашей компании (spacelin.ru) с телефона не отражается корректно.
По крайней мере новости.
Б.г.> первые три колонки - угловые скорости
Сразу хочу уточнить сопряжение осей датчиков с моей системой координат.
На старте ракета направлено перпендикулярно плоской поверхности старта, где её локальная система координат имеет следующие направления:
Ось Y направлена вдоль корпуса ракеты к её обтекателю и также перпендикулярна плоской поверхности старта.
Ось Х направлена условно вправо, если смотреть на ракету сбоку.
При первых двух условиях задания осей X и Y, ось Z получается автоматически при известном условии, что система координат правосторонняя.
Теперь для датчиков я взял пока вот так:
Для угловых скоростей:
GLRocket.VWFull.X := Giro_Y.GetY(GL_Time);
GLRocket.VWFull.Y := Giro_Z.GetY(GL_Time);
GLRocket.VWFull.Z := Giro_X.GetY(GL_Time);
Правильно ли выбраны знаки по осям?
Для ускорений:
GLRocket.A.X := -Axel_Y.GetY(GL_Time);
GLRocket.A.Y := -Axel_Z.GetY(GL_Time);
GLRocket.A.Z := -Axel_X.GetY(GL_Time);
Ускорения брать с обратным знаком по всем осям?
Пока по воспроизведению получается, что до 2,5с всё, нормально, а потом в районе 2,5-3с на канале угловой скорости Z (вроде) наблюдается зашкаливание данных, и ракета в итоге в этот момент поворачивается как-то не так и далее летит уже не туда, хотя вектор ускорений направлен относительно корпуса ракеты верно - перпендикулярно её главной оси, что должно соответствовать её горизонтальному полёту вниз, если бы данные в этот момент не потерялись.
Сразу хочу уточнить сопряжение осей датчиков с моей системой координат.
На старте ракета направлено перпендикулярно плоской поверхности старта, где её локальная система координат имеет следующие направления:
Ось Y направлена вдоль корпуса ракеты к её обтекателю и также перпендикулярна плоской поверхности старта.
Ось Х направлена условно вправо, если смотреть на ракету сбоку.
При первых двух условиях задания осей X и Y, ось Z получается автоматически при известном условии, что система координат правосторонняя.
Теперь для датчиков я взял пока вот так:
Для угловых скоростей:
GLRocket.VWFull.X := Giro_Y.GetY(GL_Time);
GLRocket.VWFull.Y := Giro_Z.GetY(GL_Time);
GLRocket.VWFull.Z := Giro_X.GetY(GL_Time);
Правильно ли выбраны знаки по осям?
Для ускорений:
GLRocket.A.X := -Axel_Y.GetY(GL_Time);
GLRocket.A.Y := -Axel_Z.GetY(GL_Time);
GLRocket.A.Z := -Axel_X.GetY(GL_Time);
Ускорения брать с обратным знаком по всем осям?
Пока по воспроизведению получается, что до 2,5с всё, нормально, а потом в районе 2,5-3с на канале угловой скорости Z (вроде) наблюдается зашкаливание данных, и ракета в итоге в этот момент поворачивается как-то не так и далее летит уже не туда, хотя вектор ускорений направлен относительно корпуса ракеты верно - перпендикулярно её главной оси, что должно соответствовать её горизонтальному полёту вниз, если бы данные в этот момент не потерялись.
Б.г.>> первые три колонки - угловые скорости
SashaMaks> Сразу хочу уточнить сопряжение осей датчиков с моей системой координат.
SashaMaks> На старте ракета направлено перпендикулярно плоской поверхности
Вдоль ракеты направлена ось Z, причём, акселерометр стоит "наоборот", на стоящей на старте ракете показывает "-1 же", т.е. -4010.
Соответственно, зашкал по вращению (крену), и на 2,5 секунды зашкал "мягкий", т.е. предел превышен был на единицы LSB.
SashaMaks> Сразу хочу уточнить сопряжение осей датчиков с моей системой координат.
SashaMaks> На старте ракета направлено перпендикулярно плоской поверхности
Вдоль ракеты направлена ось Z, причём, акселерометр стоит "наоборот", на стоящей на старте ракете показывает "-1 же", т.е. -4010.
Соответственно, зашкал по вращению (крену), и на 2,5 секунды зашкал "мягкий", т.е. предел превышен был на единицы LSB.
Б.г.> Соответственно, зашкал по вращению (крену), и на 2,5 секунды зашкал "мягкий", т.е. предел превышен был на единицы LSB.
Точно это не известно все равно, но я пробую лечить это сплайнами. Хотя увидел видео полёта вконтакте от Лина и стало ясно, что летела она как раз туда куда надо, её очень сильно на сторону заложило в апогее. Это есть, есть и примерная высота по апогею в 115-120м по данным с инерциальных датчиков. Попробую ещё к выходным поправить зашкалы в конце, может совсем тогда всё совпадёт, там и видео будет...
Точно это не известно все равно, но я пробую лечить это сплайнами. Хотя увидел видео полёта вконтакте от Лина и стало ясно, что летела она как раз туда куда надо, её очень сильно на сторону заложило в апогее. Это есть, есть и примерная высота по апогею в 115-120м по данным с инерциальных датчиков. Попробую ещё к выходным поправить зашкалы в конце, может совсем тогда всё совпадёт, там и видео будет...

Svorog1
новичок
Можно ли присоединиться к вам?
Собрал регистратор на ардуино и Gy-80. Сделал несколько запусков ракеты. В итоге пытаюсь посчитать и считается нормально только восходящая ветка полета а дальше что то не то. Может ли ктонибуть пропустить данные через свою систему чтобы посмотреть результат?
Собрал регистратор на ардуино и Gy-80. Сделал несколько запусков ракеты. В итоге пытаюсь посчитать и считается нормально только восходящая ветка полета а дальше что то не то. Может ли ктонибуть пропустить данные через свою систему чтобы посмотреть результат?

Svorog1> Можно ли присоединиться к вам?
Можно.
Svorog1> Может ли ктонибуть пропустить данные через свою систему чтобы посмотреть результат?
Нужны данные в виде значений ускорений по трём осям и угловым скоростям так же по трём осям.
Можно.
Svorog1> Может ли ктонибуть пропустить данные через свою систему чтобы посмотреть результат?
Нужны данные в виде значений ускорений по трём осям и угловым скоростям так же по трём осям.
Svorog1
новичок
SashaMaks> Нужны данные в виде значений ускорений по трём осям и угловым скоростям так же по трём осям.
в атаче
в атаче
Прикреплённые файлы:
data_tonk.rar (скачать)
[7,3 кБ]
Svorog1> В итоге пытаюсь посчитать и считается нормально только восходящая ветка полета а дальше что то не то.
Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
Прикреплённые файлы:
SashaMaks> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Svorog1
новичок
Гироскоп настроен на 2000 градусов в сек. Странно у себя на картинке не вижу перегрузок.
При этом ели обрабатывать разными фильтрами получаю разные картинки
SashaMaks>> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
SashaMaks> Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
При этом ели обрабатывать разными фильтрами получаю разные картинки
SashaMaks>> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
SashaMaks> Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Прикреплённые файлы:
Svorog1
новичок
Алгоритм AHRS
Svorog1> Гироскоп настроен на 2000 градусов в сек. Странно у себя на картинке не вижу перегрузок.
Svorog1> При этом ели обрабатывать разными фильтрами получаю разные картинки
SashaMaks>>> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
SashaMaks>> Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Svorog1> Гироскоп настроен на 2000 градусов в сек. Странно у себя на картинке не вижу перегрузок.
Svorog1> При этом ели обрабатывать разными фильтрами получаю разные картинки
SashaMaks>>> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
SashaMaks>> Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Прикреплённые файлы:
dmirg78:
предупреждение (+1) по категории «Оверквотинг[п.15]»
Svorog1
новичок
Kalman
Svorog1>> Гироскоп настроен на 2000 градусов в сек. Странно у себя на картинке не вижу перегрузок.
Svorog1>> При этом ели обрабатывать разными фильтрами получаю разные картинки
Svorog1> SashaMaks>>> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
Svorog1> SashaMaks>> Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Svorog1>> Гироскоп настроен на 2000 градусов в сек. Странно у себя на картинке не вижу перегрузок.
Svorog1>> При этом ели обрабатывать разными фильтрами получаю разные картинки
Svorog1> SashaMaks>>> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
Svorog1> SashaMaks>> Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Прикреплённые файлы:
dmirg78:
предупреждение (+1) по категории «Оверквотинг[п.15]»
Svorog1
новичок
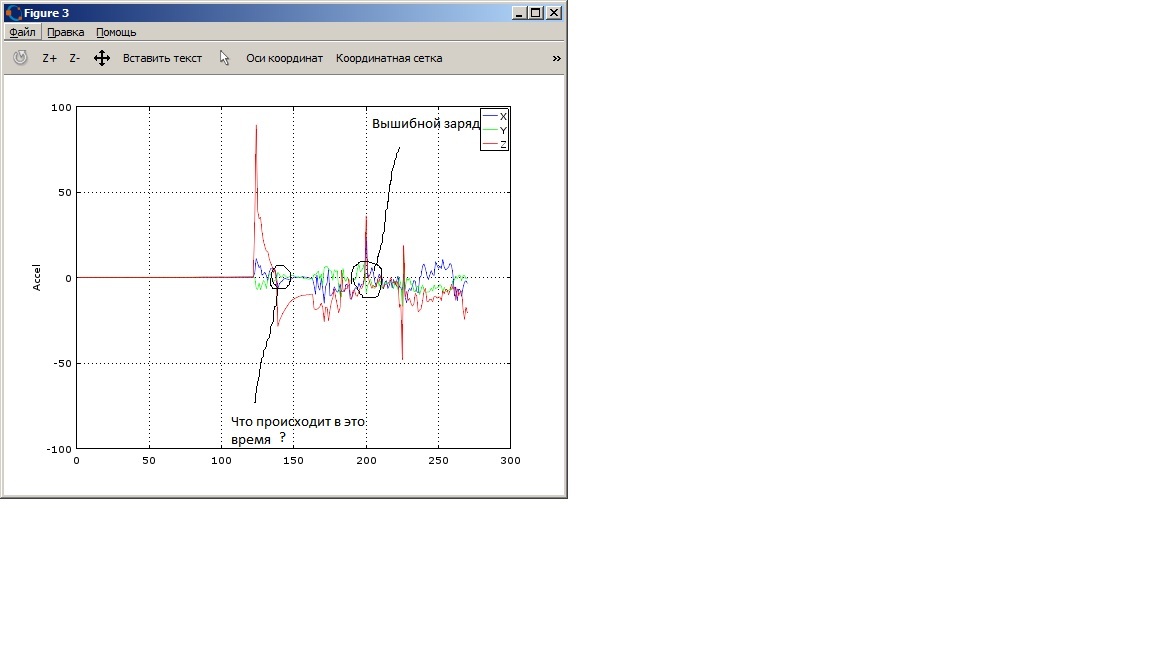
И еще вопрос после старта идет положительное ускорение. т.е все нормально. Но потом оно становится резко отрицательным. Вопрос примерно в каком положении в данный момент оказывается ракета не переворачивается ли она в данный момент на 180 градусов?
Svorog1> Kalman
Svorog1> Svorog1>> Гироскоп настроен на 2000 градусов в сек. Странно у себя на картинке не вижу перегрузок.
Svorog1> Svorog1>> При этом ели обрабатывать разными фильтрами получаю разные картинки
Svorog1>> SashaMaks>>> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
Svorog1>> SashaMaks>> Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Svorog1> Kalman
Svorog1> Svorog1>> Гироскоп настроен на 2000 градусов в сек. Странно у себя на картинке не вижу перегрузок.
Svorog1> Svorog1>> При этом ели обрабатывать разными фильтрами получаю разные картинки
Svorog1>> SashaMaks>>> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
Svorog1>> SashaMaks>> Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Svorog1
новичок
График где помечено
Svorog1> И еще вопрос после старта идет положительное ускорение. т.е все нормально. Но потом оно становится резко отрицательным. Вопрос примерно в каком положении в данный момент оказывается ракета не переворачивается ли она в данный момент на 180 градусов?
Svorog1>> Kalman
Svorog1>> Svorog1>> Гироскоп настроен на 2000 градусов в сек. Странно у себя на картинке не вижу перегрузок.
Svorog1>> Svorog1>> При этом ели обрабатывать разными фильтрами получаю разные картинки
Svorog1> Svorog1>> SashaMaks>>> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
Svorog1> Svorog1>> SashaMaks>> Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Svorog1> И еще вопрос после старта идет положительное ускорение. т.е все нормально. Но потом оно становится резко отрицательным. Вопрос примерно в каком положении в данный момент оказывается ракета не переворачивается ли она в данный момент на 180 градусов?
Svorog1>> Kalman
Svorog1>> Svorog1>> Гироскоп настроен на 2000 градусов в сек. Странно у себя на картинке не вижу перегрузок.
Svorog1>> Svorog1>> При этом ели обрабатывать разными фильтрами получаю разные картинки
Svorog1> Svorog1>> SashaMaks>>> Дальше у тебя данные с гироскопов идёт зашкаленные, поэтому и не то.
Svorog1> Svorog1>> SashaMaks>> Даже во время старта и видно, что ракета крутится вокруг своей главной оси быстрей, чем может зафиксировать датчик. Но тут это ещё не так заметно в общей картине движения.
Прикреплённые файлы:
dmirg78:
предупреждение (+1) по категории «Оверквотинг[п.15]»
Svorog1> Гироскоп настроен на 2000 градусов в сек. Странно у себя на картинке не вижу перегрузок.
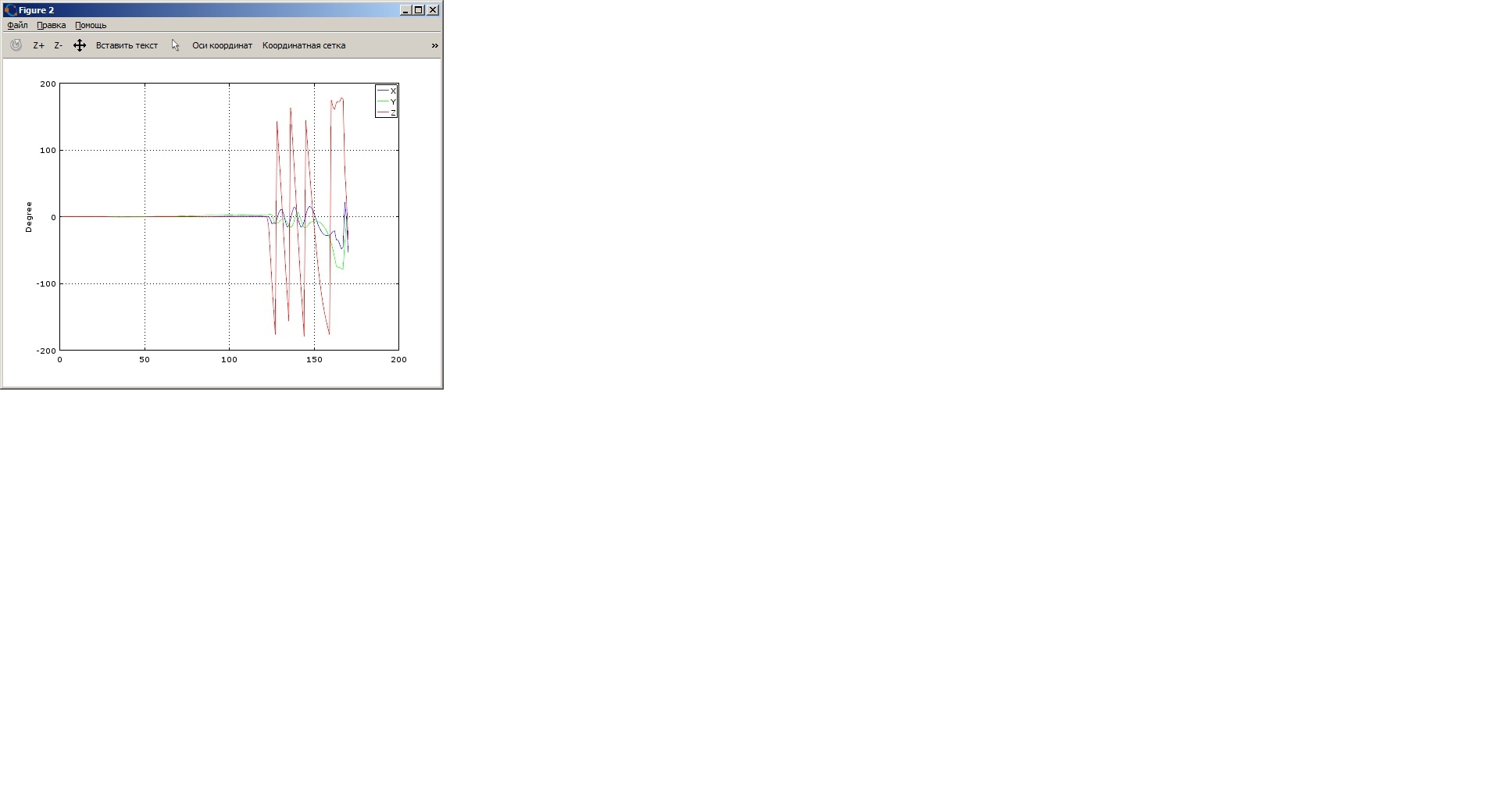
Данные какие есть. На 21 сек. уже наблюдается зашкал по гироскопу ось Z.
И там далеко не 2000г/с, а где-то только 240г/с.
Svorog1> При этом ели обрабатывать разными фильтрами получаю разные картинки
Лучше без фильтров, необработанные данные прямо с датчиков.
Данные какие есть. На 21 сек. уже наблюдается зашкал по гироскопу ось Z.
И там далеко не 2000г/с, а где-то только 240г/с.
Svorog1> При этом ели обрабатывать разными фильтрами получаю разные картинки
Лучше без фильтров, необработанные данные прямо с датчиков.
Прикреплённые файлы:
Svorog1> Вопрос примерно в каком положении в данный момент оказывается ракета не переворачивается ли она в данный момент на 180 градусов?
Нет.
Нет.
- dmirg78 [16.09.2015 07:45]: Предупреждение пользователю: Svorog1#16.09.15 06:04
- dmirg78 [16.09.2015 07:46]: Предупреждение пользователю: Svorog1#16.09.15 06:05
- dmirg78 [16.09.2015 07:47]: Предупреждение пользователю: Svorog1#16.09.15 07:08
Svorog1
новичок
Понял. Спасибо буду проверять что там с настройками чувствительности.
Svorog1>> Вопрос примерно в каком положении в данный момент оказывается ракета не переворачивается ли она в данный момент на 180 градусов?
SashaMaks> Нет.
Svorog1>> Вопрос примерно в каком положении в данный момент оказывается ракета не переворачивается ли она в данный момент на 180 градусов?
SashaMaks> Нет.
Svorog1> Проверил. Точно 250 стоит в настройках. 
Жалко, значит всё-таки сели гироскопы(
Жалко, значит всё-таки сели гироскопы(
Svorog1
новичок
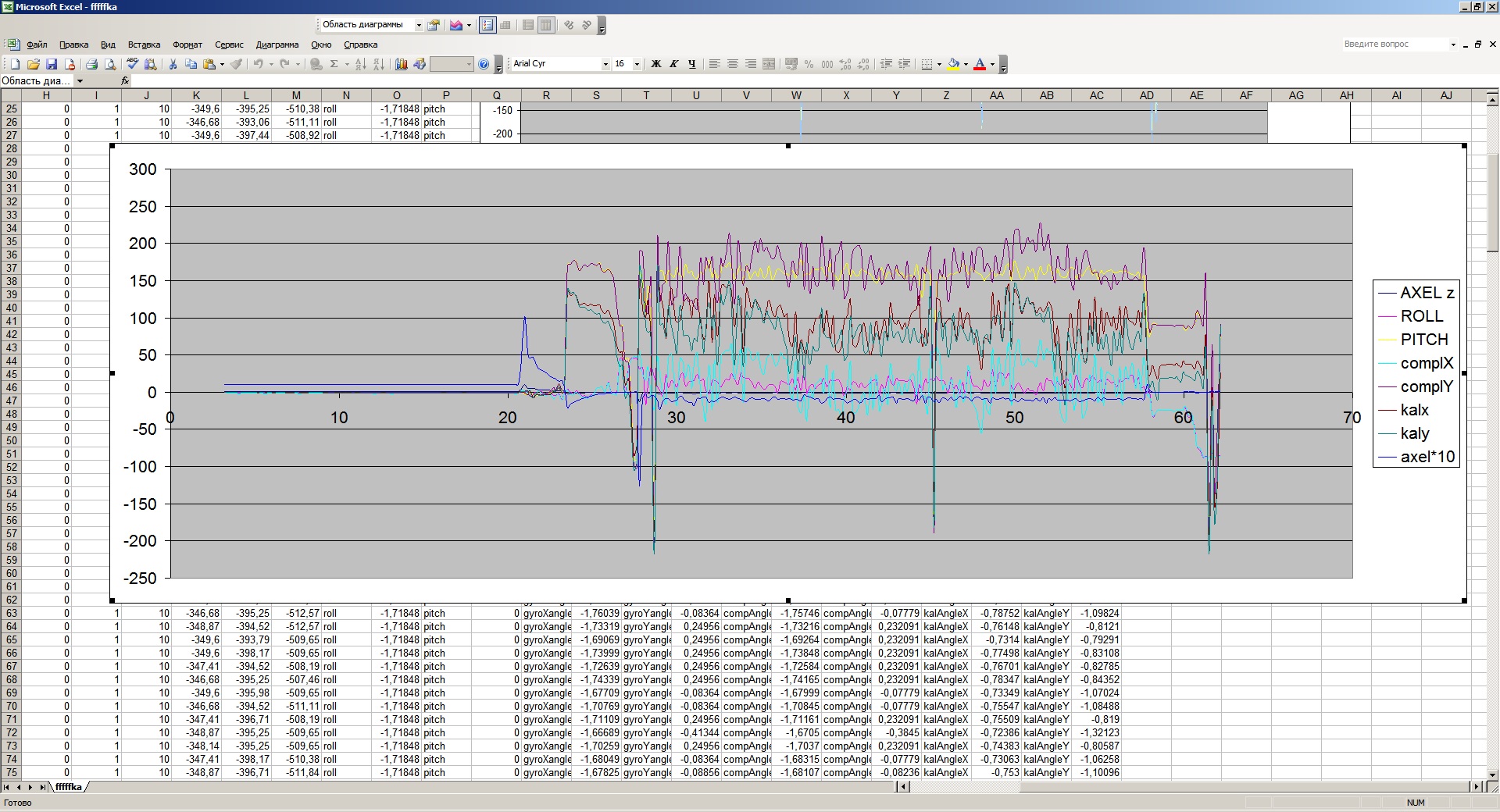
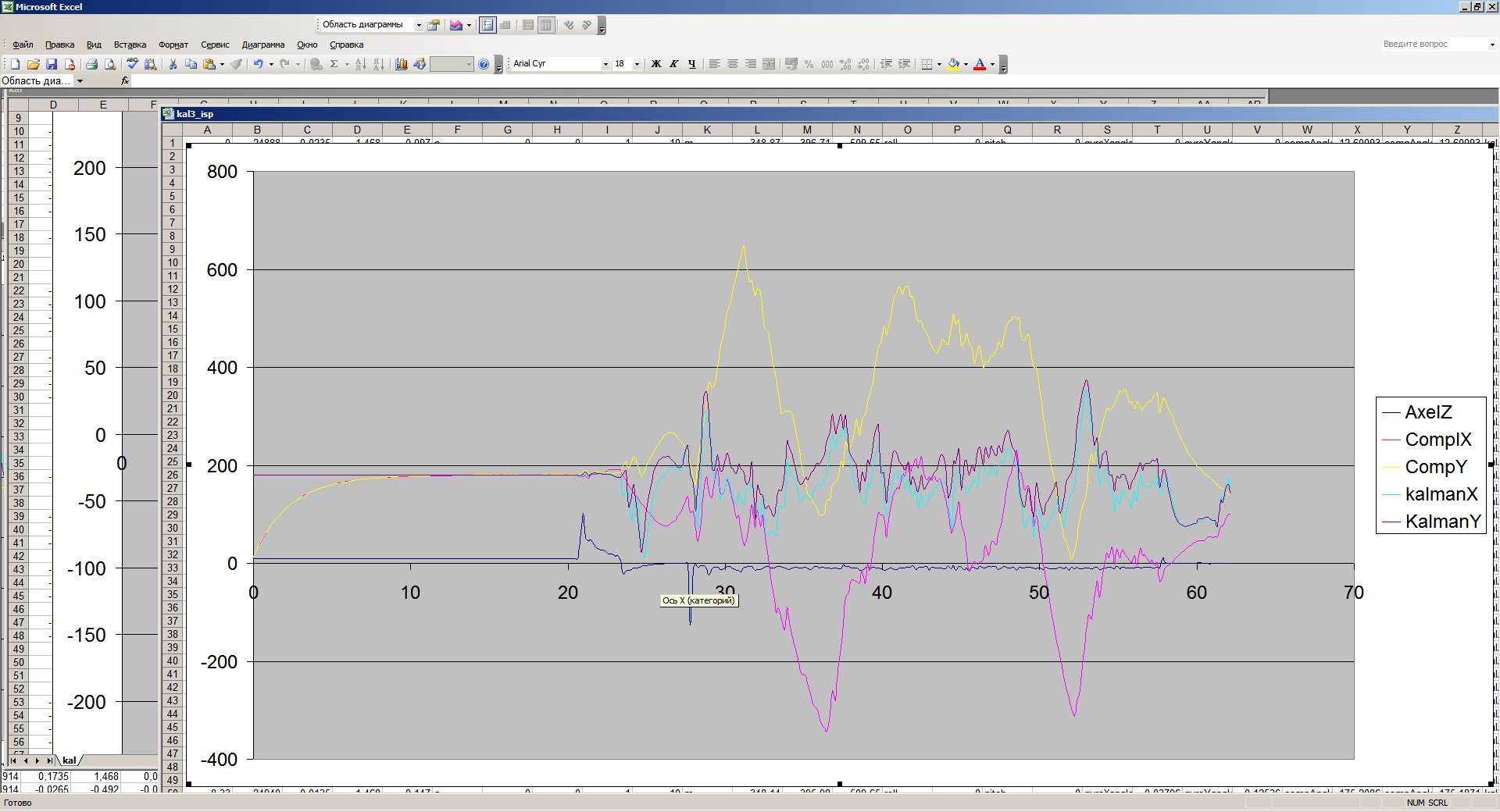
Обработал файл еще одной реализацией фильтра kalmana. Получил следущую картинку. Подскажите что есть правильно? Или близко к истине.На графике ускорение в g*10(для наглядности).
Прикреплённые файлы:
Это сообщение редактировалось 17.09.2015 в 11:46
Реклама Google — средство выживания форумов :)
Svorog1
новичок
Может ли кто ни буть выложить свои обработанный графики. ускорения по оси Z и углы roll pitch во время полета.
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
