 SashaMaks
SashaMaks


 инфо
инфо инструменты
инструменты
 pinko
pinko
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/3d/3dnews/assets/external/illustrations/2010/10/13/600098/128x128-crop/mems-accelerometer-2-big.jpg)
Использование микроэлектромеханических (MEMS) акселерометров в ракетомоделях
Теги:
Б.г.> Саша, но ведь регулярно бывает и вот так:
Пример 2:
Пример 2:
Прикреплённые файлы:



Б.г.>> Саша, но ведь регулярно бывает и вот так:
SashaMaks> Пример 2:
А, я понял, чтобы этот алгоритм дал сбой, нужно, чтобы ракета и стартовала наклонно, и чтоб повернулась боком сразу после отработки двигателя, как в вышеприведённом примере") Да, маловероятное сочетание
Да, маловероятное сочетание
Такой записи у меня под рукой нет.
SashaMaks> Пример 2:
А, я понял, чтобы этот алгоритм дал сбой, нужно, чтобы ракета и стартовала наклонно, и чтоб повернулась боком сразу после отработки двигателя, как в вышеприведённом примере
Да, маловероятное сочетание Такой записи у меня под рукой нет.
Б.г.> А, я понял, чтобы этот алгоритм дал сбой
Время апогея во втором примере какое?
Вообще графики высот от времени есть с датчиков давления для этих примеров?
Время апогея во втором примере какое?
Вообще графики высот от времени есть с датчиков давления для этих примеров?
Б.г.>> А, я понял, чтобы этот алгоритм дал сбой
SashaMaks> Время апогея во втором примере какое?
время апогея не скажу, но ракета падала плашмя, и на 11-й секунде - это удар о землю, а на 12-й - это срабатывание вышибного - его видно сильнее, потому что вдоль оси ракеты.
SashaMaks> Вообще графики высот от времени есть с датчиков давления для этих примеров?
Для первого есть, но не от моего БРЭО, а от резервного. Во втором примере, который был, на самом деле, намного раньше, датчика давления ещё не было.
В первом АЦП переключился на внешний гироскоп и по моему недосмотру не переключился обратно. В результате от "моего" датчика давления только несколько несинхронизированных значений.
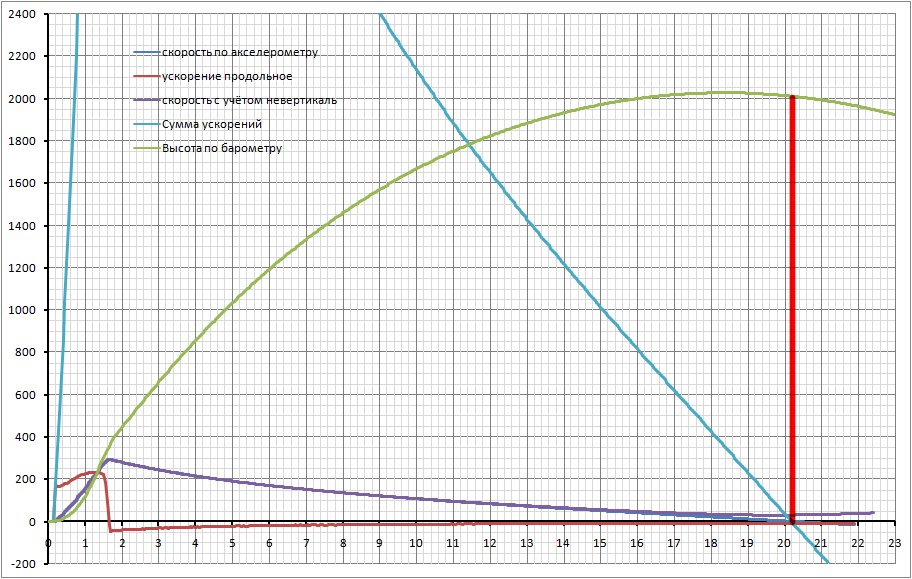
Альтернативный выглядит примерно так
Красным - с барометра (альтернативного), голубым - двойной интеграл от ускорения (с учётом откалиброванного "же").
SashaMaks> Время апогея во втором примере какое?
время апогея не скажу, но ракета падала плашмя, и на 11-й секунде - это удар о землю, а на 12-й - это срабатывание вышибного - его видно сильнее, потому что вдоль оси ракеты.
SashaMaks> Вообще графики высот от времени есть с датчиков давления для этих примеров?
Для первого есть, но не от моего БРЭО, а от резервного. Во втором примере, который был, на самом деле, намного раньше, датчика давления ещё не было.
В первом АЦП переключился на внешний гироскоп и по моему недосмотру не переключился обратно. В результате от "моего" датчика давления только несколько несинхронизированных значений.
Альтернативный выглядит примерно так
Красным - с барометра (альтернативного), голубым - двойной интеграл от ускорения (с учётом откалиброванного "же").
Прикреплённые файлы:

Б.г.> время апогея не скажу, но ракета падала плашмя, и на 11-й секунде - это удар о землю, а на 12-й - это срабатывание вышибного
А по алгоритму с акселерометра ракета была бы спасена в полёте на 8с до падения на землю. Так какой же это отказ? Это успех. Получается, что и для наклонных траекторий полёта одноосевой акселерометр лучше барометрического.
Б.г.> Красным - с барометра (альтернативного), голубым - двойной интеграл от ускорения (с учётом откалиброванного "же").
Т.е. тут другой акселерометр работал? Если так, совпадение по апогею очевидно.
Всё хорошо на практике!
А по алгоритму с акселерометра ракета была бы спасена в полёте на 8с до падения на землю. Так какой же это отказ? Это успех. Получается, что и для наклонных траекторий полёта одноосевой акселерометр лучше барометрического.
Б.г.> Красным - с барометра (альтернативного), голубым - двойной интеграл от ускорения (с учётом откалиброванного "же").
Т.е. тут другой акселерометр работал? Если так, совпадение по апогею очевидно.
Всё хорошо на практике!
Б.г.>> время апогея не скажу, но ракета падала плашмя, и на 11-й секунде - это удар о землю, а на 12-й - это срабатывание вышибного
SashaMaks> А по алгоритму с акселерометра ракета была бы спасена в полёте на 8с до падения на землю. Так какой же это отказ? Это успех. Получается, что и для наклонных траекторий полёта одноосевой акселерометр лучше барометрического.
Нет, эта ракета поднялась очень вертикально, но, практически сразу после окончания работы двигателя повернулась практически поперёк, естественно, почти сразу остановилась, и упала с высоты 108, кажется, метров. Если бы вышибной сработал на 8 с, скорее всего, ракета бы приземлилась на парашюте, а вот, если бы старт был наклонным, то парашют раскрыться бы не успел.
Б.г.>> Красным - с барометра (альтернативного), голубым - двойной интеграл от ускорения (с учётом откалиброванного "же").
SashaMaks> Т.е. тут другой акселерометр работал? Если так, совпадение по апогею очевидно.
Нет, акселерометр - "мой", а вот барометр - "альтернативный".
SashaMaks> Всё хорошо на практике!
С простым таймером тоже можно спасать ракету, просто на этот полёт на ракету было навешано много всего, в результате и устойчивость ухудшилась, и максимальная скорость уменьшилась, а таймер переставить я забыл.
SashaMaks> А по алгоритму с акселерометра ракета была бы спасена в полёте на 8с до падения на землю. Так какой же это отказ? Это успех. Получается, что и для наклонных траекторий полёта одноосевой акселерометр лучше барометрического.
Нет, эта ракета поднялась очень вертикально, но, практически сразу после окончания работы двигателя повернулась практически поперёк, естественно, почти сразу остановилась, и упала с высоты 108, кажется, метров. Если бы вышибной сработал на 8 с, скорее всего, ракета бы приземлилась на парашюте, а вот, если бы старт был наклонным, то парашют раскрыться бы не успел.
Б.г.>> Красным - с барометра (альтернативного), голубым - двойной интеграл от ускорения (с учётом откалиброванного "же").
SashaMaks> Т.е. тут другой акселерометр работал? Если так, совпадение по апогею очевидно.
Нет, акселерометр - "мой", а вот барометр - "альтернативный".
SashaMaks> Всё хорошо на практике!
С простым таймером тоже можно спасать ракету, просто на этот полёт на ракету было навешано много всего, в результате и устойчивость ухудшилась, и максимальная скорость уменьшилась, а таймер переставить я забыл.
Б.г.> Нет, эта ракета поднялась очень вертикально, но, практически сразу после окончания работы двигателя повернулась практически поперёк, естественно, почти сразу остановилась, и упала с высоты 108, кажется, метров.
И тем не менее, даже при таком аварийном полёте на алгоритме одноосевого датчика она была бы спасена в полёте до падения на грунт.
Б.г.> а вот, если бы старт был наклонным, то парашют раскрыться бы не успел.
А вот тут "бы" не уместно, я примеры работы алгоритма сейчас к практическим данным приводил!
Б.г.> С простым таймером тоже можно спасать ракету
Можно, но сложно будет. Тут считать нужно много всего и воспроизводимость нужна ля всего изделия высокая.
И тем не менее, даже при таком аварийном полёте на алгоритме одноосевого датчика она была бы спасена в полёте до падения на грунт.
Б.г.> а вот, если бы старт был наклонным, то парашют раскрыться бы не успел.
А вот тут "бы" не уместно, я примеры работы алгоритма сейчас к практическим данным приводил!
Б.г.> С простым таймером тоже можно спасать ракету
Можно, но сложно будет. Тут считать нужно много всего и воспроизводимость нужна ля всего изделия высокая.
SashaMaks> Пример 2:
Пример 3:
Полёт ракеты СВЗ-1 Конструкция ракет XI [Бывший генералиссимус#07.11.16 20:49]
Как и было рассчитано, при полёте по наклонной траектории момент срабатывания одноосевого датчика ускорений немного смещается за апогей по высоте, но зато точнее соответствует минимуму скорости полёта ракеты в апогее, что предпочтительнее для выброса парашюта без последствий его обрыва в этот момент.
Пример 3:
Полёт ракеты СВЗ-1 Конструкция ракет XI [Бывший генералиссимус#07.11.16 20:49]
Как и было рассчитано, при полёте по наклонной траектории момент срабатывания одноосевого датчика ускорений немного смещается за апогей по высоте, но зато точнее соответствует минимуму скорости полёта ракеты в апогее, что предпочтительнее для выброса парашюта без последствий его обрыва в этот момент.
Прикреплённые файлы:

Б.г.>...
Кстати, для проверки системы управления ракетой (и для эффектности), даю совет: в следующий раз запустите ваш летающий стенд под углом 30-45° к горизонту, с тем, чтобы он выровнялся в вертикальное положение. Зрелище должно быть красивым.
Кстати, для проверки системы управления ракетой (и для эффектности), даю совет: в следующий раз запустите ваш летающий стенд под углом 30-45° к горизонту, с тем, чтобы он выровнялся в вертикальное положение. Зрелище должно быть красивым.

Б.г.>>...
Massaraksh> Кстати, для проверки системы управления ракетой (и для эффектности), даю совет: в следующий раз запустите ваш летающий стенд под углом 30-45° к горизонту, с тем, чтобы он выровнялся в вертикальное положение. Зрелище должно быть красивым.
Да, мы собирались, но не в следующий раз, а попозже, когда мы будем предварительно уверены в коэффициентах и т.д. На столе вертикализация у меня работала неплохо, но там привод от моторов напрямую, а не через воздушные рули.
Правда, там граница была 22 градуса, поскольку я не стал программировать арксинус До 22 градусов неплохо работало линейное приближение. Если угол был больше, то вертикализация не доворачивала до вертикали, и я вручную давал команду повторить вертикализацию.
Massaraksh> Кстати, для проверки системы управления ракетой (и для эффектности), даю совет: в следующий раз запустите ваш летающий стенд под углом 30-45° к горизонту, с тем, чтобы он выровнялся в вертикальное положение. Зрелище должно быть красивым.
Да, мы собирались, но не в следующий раз, а попозже, когда мы будем предварительно уверены в коэффициентах и т.д. На столе вертикализация у меня работала неплохо, но там привод от моторов напрямую, а не через воздушные рули.
Правда, там граница была 22 градуса, поскольку я не стал программировать арксинус
До 22 градусов неплохо работало линейное приближение. Если угол был больше, то вертикализация не доворачивала до вертикали, и я вручную давал команду повторить вертикализацию.

Б.г.> Правда, там граница была 22 градуса, поскольку я не стал программировать арксинус До 22 градусов неплохо работало линейное приближение.
Таблицы поиска в флэш-памяти наверно может ускорить процесс. Это должно работать довольно быстро и флэш-память позволяет большие таблицы.
До 22 градусов неплохо работало линейное приближение. Таблицы поиска в флэш-памяти наверно может ускорить процесс. Это должно работать довольно быстро и флэш-память позволяет большие таблицы.
Б.г.>> Правда, там граница была 22 градуса, поскольку я не стал программировать арксинус До 22 градусов неплохо работало линейное приближение.
pinko> Таблицы поиска в флэш-памяти наверно может ускорить процесс. Это должно работать довольно быстро и флэш-память позволяет большие таблицы.
Да можно и запрограммировать, наверно но нужно ли? 22 градуса - это более чем достаточно для разумных параметров запуска Реальные отклонения от вертикали не превышают 10 градусов. Нарочно пускать с перекосом ради эффектности - хороший эксперимент, но это не дело первостепенной важности.
До 22 градусов неплохо работало линейное приближение. pinko> Таблицы поиска в флэш-памяти наверно может ускорить процесс. Это должно работать довольно быстро и флэш-память позволяет большие таблицы.
Да можно и запрограммировать, наверно
но нужно ли? 22 градуса - это более чем достаточно для разумных параметров запуска Реальные отклонения от вертикали не превышают 10 градусов. Нарочно пускать с перекосом ради эффектности - хороший эксперимент, но это не дело первостепенной важности.
Б.г.> Нарочно пускать с перекосом ради эффектности - хороший эксперимент, но это не дело первостепенной важности.
Вам от вас:
IvanV: "Ненаучно ты мыслишь потому что: не ставишь контрольные эксперименты"
От меня все также, только без глобального и тотального обобщения.
Ты не знаешь в данном конкретном случае, работает ли система управления, так как ракета имела во всех полетах пассивную систему стабилизации. Точно известно только лишь то, что ваш летающий стенд иногда летал криво и система управления работала нештатно, причем в большинстве случаев.
Для успешного полета ракеты по заданному на старте направлению достаточно правильной работы пассивной системы стабилизации и того, чтобы активная система управления ей в этом не мешала.
Но раз это дело не первостепенной важности, возможно и цели этих запусков были какие то другие.
Вам от вас:
IvanV: "Ненаучно ты мыслишь потому что: не ставишь контрольные эксперименты"
От меня все также, только без глобального и тотального обобщения.
Ты не знаешь в данном конкретном случае, работает ли система управления, так как ракета имела во всех полетах пассивную систему стабилизации. Точно известно только лишь то, что ваш летающий стенд иногда летал криво и система управления работала нештатно, причем в большинстве случаев.
Для успешного полета ракеты по заданному на старте направлению достаточно правильной работы пассивной системы стабилизации и того, чтобы активная система управления ей в этом не мешала.
Но раз это дело не первостепенной важности, возможно и цели этих запусков были какие то другие.

SashaMaks> Точно известно только лишь то, что ваш летающий стенд иногда летал криво и система управления работала нештатно, причем в большинстве случаев.
Да, оглядываясь на проведённые полёты, я тоже считаю, что программа испытаний должна была быть другой.
SashaMaks> Для успешного полета ракеты по заданному на старте направлению достаточно правильной работы пассивной системы стабилизации и того, чтобы активная система управления ей в этом не мешала.
Да, я знаю. Но точности изготовления в любительских условиях обычно недостаточно, чтобы без управления ракета вообще не вращалась по крену.
SashaMaks> Но раз это дело не первостепенной важности, возможно и цели этих запусков были какие то другие.
Да, одна из основных целей - исследование MEMS гироскопа за пределами описанных в даташите условий. Так, в ADIS16445 неотключаемая коррекция по температуре и по линейному ускорению, в отличие от более ранних и более поздних датчиков. Интересовало поведение гироскопа за пределами 1 "же" и за пределами возможностей встроенного акселерометра, это где-то 5,2 "же".
Удалось выяснить много интересного, в том числе, по внутренней структуре этого IMU. Действительно, при выходе ускорения за пределы 5 "же", коррекция работать перестаёт, причём, даже там, где она работает, остаток не описывается линейной формулой. Тем не менее, моя внешняя коррекция позволяет уменьшить уход ещё в 3-4 раза, по сравнению с внутренней.
У ADIS16300 встроенной коррекции не было, и уход гироскопа от линейного ускорения очень хорошо корректировался простой линейной формулой, а у более нового ADIS16460 все коррекции отключаемые. "Хочешь - пирожное, хочешь - мороженое" ©
Да, оглядываясь на проведённые полёты, я тоже считаю, что программа испытаний должна была быть другой.
SashaMaks> Для успешного полета ракеты по заданному на старте направлению достаточно правильной работы пассивной системы стабилизации и того, чтобы активная система управления ей в этом не мешала.
Да, я знаю. Но точности изготовления в любительских условиях обычно недостаточно, чтобы без управления ракета вообще не вращалась по крену.
SashaMaks> Но раз это дело не первостепенной важности, возможно и цели этих запусков были какие то другие.
Да, одна из основных целей - исследование MEMS гироскопа за пределами описанных в даташите условий. Так, в ADIS16445 неотключаемая коррекция по температуре и по линейному ускорению, в отличие от более ранних и более поздних датчиков. Интересовало поведение гироскопа за пределами 1 "же" и за пределами возможностей встроенного акселерометра, это где-то 5,2 "же".
Удалось выяснить много интересного, в том числе, по внутренней структуре этого IMU. Действительно, при выходе ускорения за пределы 5 "же", коррекция работать перестаёт, причём, даже там, где она работает, остаток не описывается линейной формулой. Тем не менее, моя внешняя коррекция позволяет уменьшить уход ещё в 3-4 раза, по сравнению с внутренней.
У ADIS16300 встроенной коррекции не было, и уход гироскопа от линейного ускорения очень хорошо корректировался простой линейной формулой, а у более нового ADIS16460 все коррекции отключаемые. "Хочешь - пирожное, хочешь - мороженое" ©

Б.г.> Но точности изготовления в любительских условиях обычно недостаточно, чтобы без управления ракета вообще не вращалась по крену.
Ну так там вроде бы как уже и не любительские условия были. Те же стабилизаторы печатались на 3D принтере.
Б.г.> Да, одна из основных целей - исследование MEMS гироскопа за пределами описанных в даташите условий.
Б.г.> Удалось выяснить много интересного, в том числе, по внутренней структуре этого IMU. Действительно, при выходе ускорения за пределы 5 "же", коррекция работать перестаёт, причём, даже там, где она работает, остаток не описывается линейной формулой.
Б.г.> "Хочешь - пирожное, хочешь - мороженое" ©
Так это и без запусков понятно было.
На запусках можно и нужно было проверить работоспособность всей СУ, а этого сделано не было. С гироскопом так же всё можно было быстрее и проще сделать "на столе" или даже в симуляторах в теории. Даже поведение УЭ гироскопа можно смоделировать под воздействием перегрузки, а вот как это определить из данных полёта неясно. Точнее непонятно, как это можно было определить из данных проведенных запусков. Насколько мне известно, достоверно траектория движения ракет ничем не определялась?
Ну так там вроде бы как уже и не любительские условия были. Те же стабилизаторы печатались на 3D принтере.
Б.г.> Да, одна из основных целей - исследование MEMS гироскопа за пределами описанных в даташите условий.
Б.г.> Удалось выяснить много интересного, в том числе, по внутренней структуре этого IMU. Действительно, при выходе ускорения за пределы 5 "же", коррекция работать перестаёт, причём, даже там, где она работает, остаток не описывается линейной формулой.
Б.г.> "Хочешь - пирожное, хочешь - мороженое" ©
Так это и без запусков понятно было.
На запусках можно и нужно было проверить работоспособность всей СУ, а этого сделано не было. С гироскопом так же всё можно было быстрее и проще сделать "на столе" или даже в симуляторах в теории. Даже поведение УЭ гироскопа можно смоделировать под воздействием перегрузки, а вот как это определить из данных полёта неясно. Точнее непонятно, как это можно было определить из данных проведенных запусков. Насколько мне известно, достоверно траектория движения ракет ничем не определялась?
SashaMaks> Так это и без запусков понятно было.
SashaMaks> На запусках можно и нужно было проверить работоспособность всей СУ, а этого сделано не было. С гироскопом так же всё можно было быстрее и проще сделать "на столе"
Всё, что можно было сделать на столе, я сделал на столе. Пять же на столе, при условии непревышения угловой скорости в 300 градусов в секунду, не сделать.
SashaMaks> или даже в симуляторах в теории. Даже поведение УЭ гироскопа можно смоделировать под воздействием перегрузки, а вот как это определить из данных полёта неясно.
Чтобы знать, что симулировать, надо знать, как оно устроено, а об этом сведений нет.
SashaMaks> Точнее непонятно, как это можно было определить из данных проведенных запусков. Насколько мне известно, достоверно траектория движения ракет ничем не определялась?
Зато есть видеосъёмка подстилающей местности, по которой можно пересчитать углы и сравнить с теми, что дают гироскопы. Есть и ещё кое-какие хитрости, о чём я сейчас пишу статью, которую надеюсь опубликовать в журнале "Приборы и техника эксперимента".
SashaMaks> На запусках можно и нужно было проверить работоспособность всей СУ, а этого сделано не было. С гироскопом так же всё можно было быстрее и проще сделать "на столе"
Всё, что можно было сделать на столе, я сделал на столе. Пять же на столе, при условии непревышения угловой скорости в 300 градусов в секунду, не сделать.
SashaMaks> или даже в симуляторах в теории. Даже поведение УЭ гироскопа можно смоделировать под воздействием перегрузки, а вот как это определить из данных полёта неясно.
Чтобы знать, что симулировать, надо знать, как оно устроено, а об этом сведений нет.
SashaMaks> Точнее непонятно, как это можно было определить из данных проведенных запусков. Насколько мне известно, достоверно траектория движения ракет ничем не определялась?
Зато есть видеосъёмка подстилающей местности, по которой можно пересчитать углы и сравнить с теми, что дают гироскопы. Есть и ещё кое-какие хитрости, о чём я сейчас пишу статью, которую надеюсь опубликовать в журнале "Приборы и техника эксперимента".
Б.г.> Интересовало поведение гироскопа за пределами 1 "же".
Б.г.> Пять же на столе, при условии непревышения угловой скорости в 300 градусов в секунду, не сделать.
1G, 5G. Понять влияние перегрузки на показания MEMS гироскопа можно было и без пусков, достаточно просто было узнать как они устроены.
Зашкаливать акселерометр - зачем? Какая тут может быть польза???
Б.г.> Чтобы знать, что симулировать, надо знать, как оно устроено, а об этом сведений нет.
Почему нет? Есть, я же нашёл в гугле, например:

Б.г.> Зато есть видеосъёмка подстилающей местности, по которой можно пересчитать углы и сравнить с теми, что дают гироскопы.
И что, точности с видео хватило, чтобы определить все нюансы с учётом особенностей конкретных моделей MEMS гироскопов?
Б.г.> Есть и ещё кое-какие хитрости, о чём я сейчас пишу статью, которую надеюсь опубликовать в журнале "Приборы и техника эксперимента".
О способах повышения точности (в данном случае - уменьшения ухода углов со временем) известно давно из соответствующих разделов математики.
Б.г.> Пять же на столе, при условии непревышения угловой скорости в 300 градусов в секунду, не сделать.
1G, 5G. Понять влияние перегрузки на показания MEMS гироскопа можно было и без пусков, достаточно просто было узнать как они устроены.
Зашкаливать акселерометр - зачем? Какая тут может быть польза???
Б.г.> Чтобы знать, что симулировать, надо знать, как оно устроено, а об этом сведений нет.
Почему нет? Есть, я же нашёл в гугле, например:
MEMS: микроэлектромеханические системы, часть 1
Даже в повседневной жизни нас со всех сторон окружают микроскопические устройства: гироскопы, акселерометры, микрофоны и другие датчики. Всем этим мы пользуемся, ни о чем не задумываясь. А из этого обзора вы можете наконец узнать, как же все это устроено // www.3dnews.ruБ.г.> Зато есть видеосъёмка подстилающей местности, по которой можно пересчитать углы и сравнить с теми, что дают гироскопы.
И что, точности с видео хватило, чтобы определить все нюансы с учётом особенностей конкретных моделей MEMS гироскопов?
Б.г.> Есть и ещё кое-какие хитрости, о чём я сейчас пишу статью, которую надеюсь опубликовать в журнале "Приборы и техника эксперимента".
О способах повышения точности (в данном случае - уменьшения ухода углов со временем) известно давно из соответствующих разделов математики.
SashaMaks> 1G, 5G. Понять влияние перегрузки на показания MEMS гироскопа можно было и без пусков, достаточно просто было узнать как они устроены.
Да как же ты узнаешь? То, что приводится в интернете, это не более, чем примеры. Реальные гироскопы выполнены иначе, и у каждой фирмы свой дизайн, который не раскрывается.
SashaMaks> Зашкаливать акселерометр - зачем? Какая тут может быть польза???
Затем, что так можно получить сведения о матобработке после АЦП внутри микросхемы.
Б.г.>> Чтобы знать, что симулировать, надо знать, как оно устроено, а об этом сведений нет.
SashaMaks> Почему нет? Есть, я же нашёл в гугле, например:
SashaMaks> MEMS: микроэлектромеханические системы, часть 1 / Аналитика
Знаешь, в гугле есть десяток вариантов устройства атомной бомбы, но ни один из вариантов не относятся к реальным атомным бомбам последних поколений.
Б.г.>> Зато есть видеосъёмка подстилающей местности, по которой можно пересчитать углы и сравнить с теми, что дают гироскопы.
SashaMaks> И что, точности с видео хватило, чтобы определить все нюансы с учётом особенностей конкретных моделей MEMS гироскопов?
Нет, не все, но результаты интересные.
Б.г.>> Есть и ещё кое-какие хитрости, о чём я сейчас пишу статью, которую надеюсь опубликовать в журнале "Приборы и техника эксперимента".
SashaMaks> О способах повышения точности (в данном случае - уменьшения ухода углов со временем) известно давно из соответствующих разделов математики.
Так-так-так... А скажи мне, если всё можно сделать математически, зачем разрабатывают новые модели гироскопов? и не только MEMS...
Да как же ты узнаешь? То, что приводится в интернете, это не более, чем примеры. Реальные гироскопы выполнены иначе, и у каждой фирмы свой дизайн, который не раскрывается.
SashaMaks> Зашкаливать акселерометр - зачем? Какая тут может быть польза???
Затем, что так можно получить сведения о матобработке после АЦП внутри микросхемы.
Б.г.>> Чтобы знать, что симулировать, надо знать, как оно устроено, а об этом сведений нет.
SashaMaks> Почему нет? Есть, я же нашёл в гугле, например:
SashaMaks> MEMS: микроэлектромеханические системы, часть 1 / Аналитика
Знаешь, в гугле есть десяток вариантов устройства атомной бомбы, но ни один из вариантов не относятся к реальным атомным бомбам последних поколений.
Б.г.>> Зато есть видеосъёмка подстилающей местности, по которой можно пересчитать углы и сравнить с теми, что дают гироскопы.
SashaMaks> И что, точности с видео хватило, чтобы определить все нюансы с учётом особенностей конкретных моделей MEMS гироскопов?
Нет, не все, но результаты интересные.
Б.г.>> Есть и ещё кое-какие хитрости, о чём я сейчас пишу статью, которую надеюсь опубликовать в журнале "Приборы и техника эксперимента".
SashaMaks> О способах повышения точности (в данном случае - уменьшения ухода углов со временем) известно давно из соответствующих разделов математики.
Так-так-так... А скажи мне, если всё можно сделать математически, зачем разрабатывают новые модели гироскопов? и не только MEMS...
Б.г.> Да как же ты узнаешь? То, что приводится в интернете, это не более, чем примеры. Реальные гироскопы выполнены иначе, и у каждой фирмы свой дизайн, который не раскрывается.
Главное - это физическая сущность, конструктивные особенности уже не так важны - это уже нюансы.
Б.г.> Затем, что так можно получить сведения о матобработке после АЦП внутри микросхемы.
Не вижу связи с данными при зашкаливании. Вижу поиск проблемы там, где её может не быть, если просто взять подходящий номинал по измерительному диапазону.
Б.г.> Так-так-так... А скажи мне, если всё можно сделать математически, зачем разрабатывают новые модели гироскопов? и не только MEMS...
"Способы повышения точности" и "всё можно сделать математически" - это разные темы.
Главное - это физическая сущность, конструктивные особенности уже не так важны - это уже нюансы.
Б.г.> Затем, что так можно получить сведения о матобработке после АЦП внутри микросхемы.
Не вижу связи с данными при зашкаливании. Вижу поиск проблемы там, где её может не быть, если просто взять подходящий номинал по измерительному диапазону.
Б.г.> Так-так-так... А скажи мне, если всё можно сделать математически, зачем разрабатывают новые модели гироскопов? и не только MEMS...
"Способы повышения точности" и "всё можно сделать математически" - это разные темы.
Б.г.>> Да как же ты узнаешь? То, что приводится в интернете, это не более, чем примеры. Реальные гироскопы выполнены иначе, и у каждой фирмы свой дизайн, который не раскрывается.
SashaMaks> Главное - это физическая сущность, конструктивные особенности уже не так важны - это уже нюансы.
Ога! Скажи мне формулу коррекции ADIS16445! Итак, у нас есть 3 акселерометра и 3 гироскопа, итого, даже при линейной коррекции 9 коэффициентов.
Может, ты ещё знаешь, какой порядок мне пришлось реально использовать?
Б.г.>> Затем, что так можно получить сведения о матобработке после АЦП внутри микросхемы.
SashaMaks> Не вижу связи с данными при зашкаливании. Вижу поиск проблемы там, где её может не быть, если просто взять подходящий номинал по измерительному диапазону.
Проблема, однако, в том, что я строю систему управления для ракеты длиной 13 метров и диаметром полметра, а испытывать приходится на ракете длиной 2 метра и диаметром 0,1 метра. Параметры, которые мне подойдут, для этих случаев весьма различны.
Но дело, в данном случае, даже не в этом. Мне нужно из датчика выжать точность, куда большую, чем предназначали его создатели.
"Взять" можно и волоконный лазерный гироскоп за 2000 долларов. И тогда не испытывать, а сразу типа лететь. А вот не получается. У него свои источники ошибок есть. Он, как ни странно, реагирует на магнитное поле Земли.
Б.г.>> Так-так-так... А скажи мне, если всё можно сделать математически, зачем разрабатывают новые модели гироскопов? и не только MEMS...
SashaMaks> "Способы повышения точности" и "всё можно сделать математически" - это разные темы.
SashaMaks> Главное - это физическая сущность, конструктивные особенности уже не так важны - это уже нюансы.
Ога! Скажи мне формулу коррекции ADIS16445! Итак, у нас есть 3 акселерометра и 3 гироскопа, итого, даже при линейной коррекции 9 коэффициентов.
Может, ты ещё знаешь, какой порядок мне пришлось реально использовать?
Б.г.>> Затем, что так можно получить сведения о матобработке после АЦП внутри микросхемы.
SashaMaks> Не вижу связи с данными при зашкаливании. Вижу поиск проблемы там, где её может не быть, если просто взять подходящий номинал по измерительному диапазону.
Проблема, однако, в том, что я строю систему управления для ракеты длиной 13 метров и диаметром полметра, а испытывать приходится на ракете длиной 2 метра и диаметром 0,1 метра. Параметры, которые мне подойдут, для этих случаев весьма различны.
Но дело, в данном случае, даже не в этом. Мне нужно из датчика выжать точность, куда большую, чем предназначали его создатели.
"Взять" можно и волоконный лазерный гироскоп за 2000 долларов. И тогда не испытывать, а сразу типа лететь. А вот не получается. У него свои источники ошибок есть. Он, как ни странно, реагирует на магнитное поле Земли.
Б.г.>> Так-так-так... А скажи мне, если всё можно сделать математически, зачем разрабатывают новые модели гироскопов? и не только MEMS...
SashaMaks> "Способы повышения точности" и "всё можно сделать математически" - это разные темы.
Б.г.> Ога! Скажи мне формулу коррекции ADIS16445! Итак, у нас есть 3 акселерометра и 3 гироскопа, итого, даже при линейной коррекции 9 коэффициентов.
Б.г.> Может, ты ещё знаешь, какой порядок мне пришлось реально использовать?
SashaMaks: "О способах повышения точности (в данном случае - уменьшения ухода углов со временем) известно давно из соответствующих разделов математики."
Не стоит думать, что твоё решение здесь единственно верное и максимально точное.
Б.г.> Параметры, которые мне подойдут, для этих случаев весьма различны.
Вот. Это ещё один довод в сторону того, что не совсем понятны такие дотошные изыскания в гироскопах там, где они и не нужны получается. Ну разве что только математику изучить на практике.
Здесь интересно было именно увидеть, что СУ вообще в целом работает, а не то насколько точно. Если не видно первого, нет смысла во втором.
Я ни разу в вашем проекте не видел хотя бы вот этого:
Гироскоп+Акселерометр (эксперимент №1)
Данные с микроконтроллера и двух датчиков: акселерометра и гироскопа, поступают прямо на ПК, где по ним "на лету" рассчитывается положение объекта в пространстве.
, где было бы наглядно видно, что матмодель адекватная и на её основе можно строить СУ.
Б.г.> Но дело, в данном случае, даже не в этом. Мне нужно из датчика выжать точность, куда большую, чем предназначали его создатели.
А это уже видимо потолок для MEMS-ов. Я лично сильно сомневаюсь, что для выхода на орбиту их хватит. В лучшем случае для высотных пусков с СУ может и выйдет чего. И то сложно, проще закрутить ракету.
Б.г.> Может, ты ещё знаешь, какой порядок мне пришлось реально использовать?
SashaMaks: "О способах повышения точности (в данном случае - уменьшения ухода углов со временем) известно давно из соответствующих разделов математики."
Не стоит думать, что твоё решение здесь единственно верное и максимально точное.
Б.г.> Параметры, которые мне подойдут, для этих случаев весьма различны.
Вот. Это ещё один довод в сторону того, что не совсем понятны такие дотошные изыскания в гироскопах там, где они и не нужны получается. Ну разве что только математику изучить на практике.
Здесь интересно было именно увидеть, что СУ вообще в целом работает, а не то насколько точно. Если не видно первого, нет смысла во втором.
Я ни разу в вашем проекте не видел хотя бы вот этого:
Гироскоп+Акселерометр (эксперимент №1)
Данные с микроконтроллера и двух датчиков: акселерометра и гироскопа, поступают прямо на ПК, где по ним "на лету" рассчитывается положение объекта в пространстве.
, где было бы наглядно видно, что матмодель адекватная и на её основе можно строить СУ.
Б.г.> Но дело, в данном случае, даже не в этом. Мне нужно из датчика выжать точность, куда большую, чем предназначали его создатели.
А это уже видимо потолок для MEMS-ов. Я лично сильно сомневаюсь, что для выхода на орбиту их хватит. В лучшем случае для высотных пусков с СУ может и выйдет чего. И то сложно, проще закрутить ракету.
SashaMaks> SashaMaks: "О способах повышения точности (в данном случае - уменьшения ухода углов со временем) известно давно из соответствующих разделов математики."
Саша, ни один раздел математики ничего не знает про то, как уменьшить уход гироскопа. Если ты знаешь обратное, приведи цитату. Необязательно из интернета, скажи, в какой книжке и на какой странице.
SashaMaks> Не стоит думать, что твоё решение здесь единственно верное и максимально точное.
а я и не думаю, что оно максимально точное. И, конечно, оно не единственное. Стендовой базы мне не хватает катастрофически. Но в три раза от приведённых в даташите цифр я выиграл.
Б.г.>> Параметры, которые мне подойдут, для этих случаев весьма различны.
SashaMaks> Вот. Это ещё один довод в сторону того, что не совсем понятны такие дотошные изыскания в гироскопах там, где они и не нужны получается.
Саша, если они тебе непонятны, значит, надо постараться понять. Потому что другие люди, занимающиеся инерциальной навигацией, меня понимают, и даже статью в рецензируемом журнале опубликовали
SashaMaks> Я ни разу в вашем проекте не видел хотя бы вот этого:
SashaMaks> , где было бы наглядно видно, что матмодель адекватная и на её основе можно строить СУ.
А почему ты думаешь, что там наглядно видно что бы то ни было? У меня нет такого видео, потому что я не умею красиво программировать под виндовс. Но то, что автомат угловой стабилизации работает, т.е. возвращает рули в нейтраль при возвращении ракеты в исходное положение, и отклоняет их в правильную сторону при отклонении, я, конечно, проверял не раз и не два. По всем трём осям.
И, да, во втором полёте была перепутка знака по тангажу. Но от этого никто не застрахован. И, да, была потеря устойчивости по крену. Но это вопрос АЧХ и ФЧХ, которые сложно проконтролировать на земле, да ещё и эффективность рулей априори известна с очень большой погрешностью.
Б.г.>> Но дело, в данном случае, даже не в этом. Мне нужно из датчика выжать точность, куда большую, чем предназначали его создатели.
SashaMaks> А это уже видимо потолок для MEMS-ов. Я лично сильно сомневаюсь, что для выхода на орбиту их хватит.
Создатели новозеландской ракеты "Электрон" тоже сделали систему управления на MEMS-ах. Но их бюджет многократно больше нашего, так что они грозятся уже в этом году полететь на орбиту.
Самые дорогие MEMS-ы уже превзошли по точности самые дешёвые FOG-и. Но у меня столько денег нету. Я использую датчики промежуточные, как по цене, так и по точности.
SashaMaks> В лучшем случае для высотных пусков с СУ может и выйдет чего. И то сложно, проще закрутить ракету.
Саша, полностью твердотопливная ракета с наклонным стартом может выйти на орбиту вовсе без инерциальной системы управления. Это нетривиально, но возможно. И даже без радиокомандной системы наведения, что использовалось на второй японской ракете Мю-4S.
Но для жидкостной ракеты с вертикальным стартом разворот по тангажу по определённому закону требует гироскопов.
Саша, ни один раздел математики ничего не знает про то, как уменьшить уход гироскопа. Если ты знаешь обратное, приведи цитату. Необязательно из интернета, скажи, в какой книжке и на какой странице.
SashaMaks> Не стоит думать, что твоё решение здесь единственно верное и максимально точное.
а я и не думаю, что оно максимально точное. И, конечно, оно не единственное. Стендовой базы мне не хватает катастрофически. Но в три раза от приведённых в даташите цифр я выиграл.
Б.г.>> Параметры, которые мне подойдут, для этих случаев весьма различны.
SashaMaks> Вот. Это ещё один довод в сторону того, что не совсем понятны такие дотошные изыскания в гироскопах там, где они и не нужны получается.
Саша, если они тебе непонятны, значит, надо постараться понять. Потому что другие люди, занимающиеся инерциальной навигацией, меня понимают, и даже статью в рецензируемом журнале опубликовали
SashaMaks> Я ни разу в вашем проекте не видел хотя бы вот этого:
SashaMaks> , где было бы наглядно видно, что матмодель адекватная и на её основе можно строить СУ.
А почему ты думаешь, что там наглядно видно что бы то ни было? У меня нет такого видео, потому что я не умею красиво программировать под виндовс. Но то, что автомат угловой стабилизации работает, т.е. возвращает рули в нейтраль при возвращении ракеты в исходное положение, и отклоняет их в правильную сторону при отклонении, я, конечно, проверял не раз и не два. По всем трём осям.
И, да, во втором полёте была перепутка знака по тангажу. Но от этого никто не застрахован. И, да, была потеря устойчивости по крену. Но это вопрос АЧХ и ФЧХ, которые сложно проконтролировать на земле, да ещё и эффективность рулей априори известна с очень большой погрешностью.
Б.г.>> Но дело, в данном случае, даже не в этом. Мне нужно из датчика выжать точность, куда большую, чем предназначали его создатели.
SashaMaks> А это уже видимо потолок для MEMS-ов. Я лично сильно сомневаюсь, что для выхода на орбиту их хватит.
Создатели новозеландской ракеты "Электрон" тоже сделали систему управления на MEMS-ах. Но их бюджет многократно больше нашего, так что они грозятся уже в этом году полететь на орбиту.
Самые дорогие MEMS-ы уже превзошли по точности самые дешёвые FOG-и. Но у меня столько денег нету. Я использую датчики промежуточные, как по цене, так и по точности.
SashaMaks> В лучшем случае для высотных пусков с СУ может и выйдет чего. И то сложно, проще закрутить ракету.
Саша, полностью твердотопливная ракета с наклонным стартом может выйти на орбиту вовсе без инерциальной системы управления. Это нетривиально, но возможно. И даже без радиокомандной системы наведения, что использовалось на второй японской ракете Мю-4S.
Но для жидкостной ракеты с вертикальным стартом разворот по тангажу по определённому закону требует гироскопов.
Б.г.> Саша, ни один раздел математики ничего не знает про то, как уменьшить уход гироскопа. Если ты знаешь обратное, приведи цитату. Необязательно из интернета, скажи, в какой книжке и на какой странице.
Математика - это инструмент, который может помочь уменьшить уход гироскопа. Ты же не мог физически чип изменить для этого, значит тоже использовал математику. А конкретные ссылки я приведу после того, как появится та самая публикация, где будут описаны те самые особенности. Интересно сравнить та ли эта математика, что я думаю или может действительно что-то новое. Особенно интересны моменты точности коррекции по летным испытаниям.
Б.г.> Стендовой базы мне не хватает катастрофически.
Так вот если цель была именно в точной настройке гироскопов, то и нужен был стенд, а не ракета. Точность измерений на стенде будет на порядки выше, работа на порядки проще и данных на порядки больше. Вот это и не понятно, почему была выбрана ракета, а не стенд. СУ как выяснилось заработала в самом конце, но и тут выяснилось, что сама по себе ракета была с пассивной системой стабилизации, и могла лететь ровно в том числе и при условии полной неработоспособности активной СУ.
Каков итог всех этих испытаний? Активная СУ работает? Если да, то где наглядное тому подтверждение, что работает именно она?
Б.г.> Саша, если они тебе непонятны, значит, надо постараться понять.
Скажу честно, я понимаю, но как бы то ни было, от меня это будет мое ИМХО. Интересны доводы самих авторов.
Б.г.> А почему ты думаешь, что там наглядно видно что бы то ни было?
Матмодель в режиме реального времени отражает угловые перемещения объекта. Я смотрю на видео, которое записывало это одновременно в кадре и вижу, что движения матмодели качественно совпадают с движением объекта.
Математика - это инструмент, который может помочь уменьшить уход гироскопа. Ты же не мог физически чип изменить для этого, значит тоже использовал математику. А конкретные ссылки я приведу после того, как появится та самая публикация, где будут описаны те самые особенности. Интересно сравнить та ли эта математика, что я думаю или может действительно что-то новое. Особенно интересны моменты точности коррекции по летным испытаниям.
Б.г.> Стендовой базы мне не хватает катастрофически.
Так вот если цель была именно в точной настройке гироскопов, то и нужен был стенд, а не ракета. Точность измерений на стенде будет на порядки выше, работа на порядки проще и данных на порядки больше. Вот это и не понятно, почему была выбрана ракета, а не стенд. СУ как выяснилось заработала в самом конце, но и тут выяснилось, что сама по себе ракета была с пассивной системой стабилизации, и могла лететь ровно в том числе и при условии полной неработоспособности активной СУ.
Каков итог всех этих испытаний? Активная СУ работает? Если да, то где наглядное тому подтверждение, что работает именно она?
Б.г.> Саша, если они тебе непонятны, значит, надо постараться понять.
Скажу честно, я понимаю, но как бы то ни было, от меня это будет мое ИМХО. Интересны доводы самих авторов.
Б.г.> А почему ты думаешь, что там наглядно видно что бы то ни было?
Матмодель в режиме реального времени отражает угловые перемещения объекта. Я смотрю на видео, которое записывало это одновременно в кадре и вижу, что движения матмодели качественно совпадают с движением объекта.
Б.г.>> Если ты знаешь обратное, приведи цитату.
SashaMaks> Математика - это инструмент, который может помочь уменьшить уход гироскопа.
Математика - это инструмент, который ничего не может сделать с уходом гироскопа. Ни уменьшить, ни предсказать. Если бы был такой способ, все бы им пользовались, и не надо было делать более точные датчики.
SashaMaks> Ты же не мог физически чип изменить для этого, значит тоже использовал математику.
Есть источники систематических ошибок, с ними я борюсь. Для того, чтобы бороться лучше, я должен точнее понимать, как эти источники работают. Внутренняя структура IMU не раскрывается, но, поставив IMU в некоторые специфические условия, я частично могу эту структуру раскрыть. Что я и делал.
Фирма-изготовитель тоже пытается бороться с этими систематическими ошибками, но, потому что ей надо побороть эти ошибки единообразно во всех экземплярах этого продукта, она использует не наилучшую возможную модель для конкретного экземпляра, а обобщённую.
В результате у двух экземпляров ADIS16445, купленных с разрывом полгода, величины этих ошибок имеют разные знаки и разные показатели степени корректирующих полиномов. В первом экземпляре я, подумав и взвесив, ограничился первой степенью. Во втором использовать пришлось кубический полином. Причём, в пределах плюс-минус 1 g линейное приближение работало не хуже, а вот в пределах плюс-минус 5 g кубический член стал вполне заметен - его значение в точках 5 g составляет -1/512 для оси X и +1/512 для оси Z. Нетрудно заметить, что в точках плюс-минус 1 g его значение составляет -1/12800 и не может изменить показания угловой скорости больше, чем на 2 LSB, поэтому в пределах 1 g точность, даваемая чисто линейной коррекцией, практически не отличается.
SashaMaks> А конкретные ссылки я приведу после того, как появится та самая публикация, где будут описаны те самые особенности.
Слив засчитан.
Б.г.>> А почему ты думаешь, что там наглядно видно что бы то ни было?
SashaMaks> Матмодель в режиме реального времени отражает угловые перемещения объекта.
Реальное время - это удобно, но недостаточно точно. Я анализировал данные в экселе постфактум. Это не так впечатляет, но, зато, можно определить величину накопленной ошибки.
SashaMaks>Я смотрю на видео, которое записывало это одновременно в кадре и вижу, что движения матмодели качественно совпадают с движением объекта.
А я смотрю количественно, когда и насколько у меня отклонились рулевые машинки, и когда они вернулись в нейтраль.
SashaMaks> Математика - это инструмент, который может помочь уменьшить уход гироскопа.
Математика - это инструмент, который ничего не может сделать с уходом гироскопа. Ни уменьшить, ни предсказать. Если бы был такой способ, все бы им пользовались, и не надо было делать более точные датчики.
SashaMaks> Ты же не мог физически чип изменить для этого, значит тоже использовал математику.
Есть источники систематических ошибок, с ними я борюсь. Для того, чтобы бороться лучше, я должен точнее понимать, как эти источники работают. Внутренняя структура IMU не раскрывается, но, поставив IMU в некоторые специфические условия, я частично могу эту структуру раскрыть. Что я и делал.
Фирма-изготовитель тоже пытается бороться с этими систематическими ошибками, но, потому что ей надо побороть эти ошибки единообразно во всех экземплярах этого продукта, она использует не наилучшую возможную модель для конкретного экземпляра, а обобщённую.
В результате у двух экземпляров ADIS16445, купленных с разрывом полгода, величины этих ошибок имеют разные знаки и разные показатели степени корректирующих полиномов. В первом экземпляре я, подумав и взвесив, ограничился первой степенью. Во втором использовать пришлось кубический полином. Причём, в пределах плюс-минус 1 g линейное приближение работало не хуже, а вот в пределах плюс-минус 5 g кубический член стал вполне заметен - его значение в точках 5 g составляет -1/512 для оси X и +1/512 для оси Z. Нетрудно заметить, что в точках плюс-минус 1 g его значение составляет -1/12800 и не может изменить показания угловой скорости больше, чем на 2 LSB, поэтому в пределах 1 g точность, даваемая чисто линейной коррекцией, практически не отличается.
SashaMaks> А конкретные ссылки я приведу после того, как появится та самая публикация, где будут описаны те самые особенности.
Слив засчитан.
Б.г.>> А почему ты думаешь, что там наглядно видно что бы то ни было?
SashaMaks> Матмодель в режиме реального времени отражает угловые перемещения объекта.
Реальное время - это удобно, но недостаточно точно. Я анализировал данные в экселе постфактум. Это не так впечатляет, но, зато, можно определить величину накопленной ошибки.
SashaMaks>Я смотрю на видео, которое записывало это одновременно в кадре и вижу, что движения матмодели качественно совпадают с движением объекта.
А я смотрю количественно, когда и насколько у меня отклонились рулевые машинки, и когда они вернулись в нейтраль.
Реклама Google — средство выживания форумов :)
Б.г.> Математика - это инструмент, который ничего не может сделать с уходом гироскопа. Ни уменьшить, ни предсказать.
А это что?
Б.г.> Есть источники систематических ошибок, с ними я борюсь.
А как именно борешься, если не с помощью математики?
Б.г.> >Слив засчитан.
Я всё же подожду вот эту статью:
Б.г.> Есть и ещё кое-какие хитрости, о чём я сейчас пишу статью, которую надеюсь опубликовать в журнале "Приборы и техника эксперимента".
Б.г.> Реальное время - это удобно, но недостаточно точно.
Для точности я тоже могу открытьэксель свою программу с графиками, где будут отображены все функции динамики, механики и кинематики с этого симулятора во всех подробностях. Но не имея при этом стенда для гироскопа и всё это будет "недостаточно точно", а следовательно и нет смысла при таком раскладе гнаться за точностью. Сначала нужно сделать стенд.
Б.г.> А я смотрю количественно, когда и насколько у меня отклонились рулевые машинки, и когда они вернулись в нейтраль.
При этом ты не знаешь такого же количественного положения объекта в пространстве.
Но ещё раз, я подожду выхода статьи.
А это что?
Б.г.> Есть источники систематических ошибок, с ними я борюсь.
А как именно борешься, если не с помощью математики?
Б.г.> >Слив засчитан.
Я всё же подожду вот эту статью:
Б.г.> Есть и ещё кое-какие хитрости, о чём я сейчас пишу статью, которую надеюсь опубликовать в журнале "Приборы и техника эксперимента".
Б.г.> Реальное время - это удобно, но недостаточно точно.
Для точности я тоже могу открыть
Б.г.> А я смотрю количественно, когда и насколько у меня отклонились рулевые машинки, и когда они вернулись в нейтраль.
При этом ты не знаешь такого же количественного положения объекта в пространстве.
Но ещё раз, я подожду выхода статьи.
Copyright © Balancer 1997..2023
Создано 26.06.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 26.06.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
