 Александр Леонов
Александр Леонов
 инфо
инфо инструменты
инструменты Bredonosec
Bredonosec









 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/ai/airwar/image/idop/ah/mi24p/128x128-crop/mi24p-4.jpg)
Требуется консультация по двигателям и аэродинамике
Теги:

Полл> Интересно, этот режим требовал от пилотов Ми-24 особых действий?
это надо бы у Шурави спросить
ну или в РЛЭ посмотреть если есть
это надо бы у Шурави спросить
ну или в РЛЭ посмотреть если есть


Полл> Кто кушал кактусы с попытками разгрузить крылом роторы квадриков на маршевых режимах - расскажите, какие проблемы вылазят?
это примерная схема аппарата?
Обрати внимание, что крыло будет обтекаться косым турбулентным потоком.
То есть, угол атаки крыла выставь так, чтоб его "горизонталь" была направлена по потоку (если нечем считать-моделить типа флоувижна или чего, то опытным путем поиграйся), но градусов так -надцать, а то и хорошо за 20 - вполне реально. На гоночных фпв глянь заодно, там УА крыльев около 30 градусов на выпуклый глаз.
И профиль ну точно не ламинарный должен быть ))
А если возможно, то как-то организовать, чтоб от пропа на крыло поток не попадал вообще. То есть, спереди только нижние пропы, или расположение крыльев так, чтоб поток от пропов не попадал на..
И шума меньше, и паразитного сопротивления ака потерь..
это примерная схема аппарата?
Обрати внимание, что крыло будет обтекаться косым турбулентным потоком.
То есть, угол атаки крыла выставь так, чтоб его "горизонталь" была направлена по потоку (если нечем считать-моделить типа флоувижна или чего, то опытным путем поиграйся), но градусов так -надцать, а то и хорошо за 20 - вполне реально. На гоночных фпв глянь заодно, там УА крыльев около 30 градусов на выпуклый глаз.
И профиль ну точно не ламинарный должен быть ))
А если возможно, то как-то организовать, чтоб от пропа на крыло поток не попадал вообще. То есть, спереди только нижние пропы, или расположение крыльев так, чтоб поток от пропов не попадал на..
И шума меньше, и паразитного сопротивления ака потерь..


Полл> Я ставлю ВМГ под углом к вертикали. Это осложняет взлет-посадку, в вертикальном режиме квадрику приходится сильно задирать нос, зато в маршевом режиме рама может быть горизонтальна.
а зачем? Чтоб плоскость нагрузки не поворачивать? Ось поворота камер нагрузки ведь может быть и под наклоном относительно плоскости рамы.
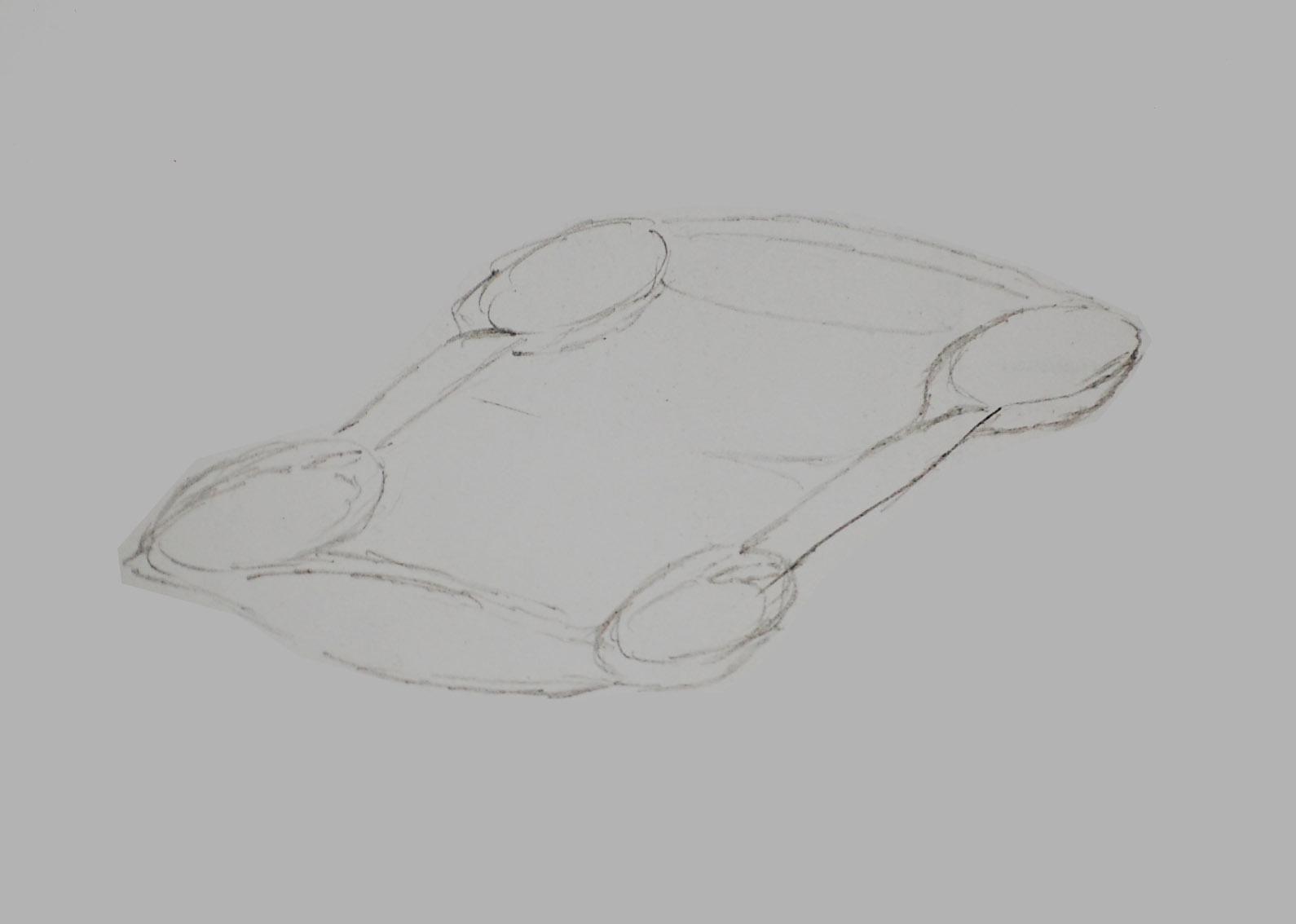
Да и вообще я б предложил перекомпоновать всю модель - напр, вот так:
2 "фюзеляжа" по бокам остаются, но крылья (оба несущие, нафиг нам не сдалось классическое ГО, тянущее вниз), вписаны в ксс. По центру можно оставить вертикальную балку для опциональной подвески чего-нить, но можно и не иметь вовсе.
а зачем? Чтоб плоскость нагрузки не поворачивать? Ось поворота камер нагрузки ведь может быть и под наклоном относительно плоскости рамы.
Да и вообще я б предложил перекомпоновать всю модель - напр, вот так:
2 "фюзеляжа" по бокам остаются, но крылья (оба несущие, нафиг нам не сдалось классическое ГО, тянущее вниз), вписаны в ксс. По центру можно оставить вертикальную балку для опциональной подвески чего-нить, но можно и не иметь вовсе.
Прикреплённые файлы:
Bredonosec> это примерная схема аппарата?
Да.
Bredonosec> Обрати внимание, что крыло будет обтекаться косым турбулентным потоком.
Здесь тоже:

Bredonosec> То есть, угол атаки крыла выставь так, чтоб его "горизонталь" была направлена по потоку (если нечем считать-моделить типа флоувижна или чего, то опытным путем поиграйся), но градусов так -надцать, а то и хорошо за 20 - вполне реально. На гоночных фпв глянь заодно, там УА крыльев около 30 градусов на выпуклый глаз.
"Флоувижн" подобные потоки считать не умеет.
Что за "гоночные ФПВ" с крыльями имеются в виду?
Bredonosec> 2 "фюзеляжа" по бокам остаются, но крылья (оба несущие, нафиг нам не сдалось классическое ГО, тянущее вниз), вписаны в ксс.
Тандемы имеют много проблем с управлением. Добавлять к проблемам переходного режима проблемы управления тандемом в маршевом режиме у меня желания нет.
Да.
Bredonosec> Обрати внимание, что крыло будет обтекаться косым турбулентным потоком.
Здесь тоже:

Bredonosec> То есть, угол атаки крыла выставь так, чтоб его "горизонталь" была направлена по потоку (если нечем считать-моделить типа флоувижна или чего, то опытным путем поиграйся), но градусов так -надцать, а то и хорошо за 20 - вполне реально. На гоночных фпв глянь заодно, там УА крыльев около 30 градусов на выпуклый глаз.
"Флоувижн" подобные потоки считать не умеет.

Что за "гоночные ФПВ" с крыльями имеются в виду?
Bredonosec> 2 "фюзеляжа" по бокам остаются, но крылья (оба несущие, нафиг нам не сдалось классическое ГО, тянущее вниз), вписаны в ксс.
Тандемы имеют много проблем с управлением. Добавлять к проблемам переходного режима проблемы управления тандемом в маршевом режиме у меня желания нет.
А.Л.> это надо бы у Шурави спросить
А.Л.> ну или в РЛЭ посмотреть если есть
Нашел вот что:

Что такое "посадка с подрывом НВ"?
А.Л.> ну или в РЛЭ посмотреть если есть
Нашел вот что:
Скачайте файл или обновите браузер
Скачайте файл или обновите браузерОбновите браузер, чтобы открывать документы в облаке или скачайте файл и откройте его на компьютере.Pamyatka_letchiku_Mi-24.pdfСкачать файлУстановите Яндекс.БраузерРегулярные обновленияБезопасностьСинхронизацияБраузер умеет автоматически обновляться до последней актуальной версии.Технология Protect проверяет сайты и файлы на вирусы, блокирует страницы мошенников.Режим Турбо при низкой скорости соединения ускоряет загрузку сайтов и экономит трафик.Скачать Яндекс.Браузер Скачайте файл или обновите браузерОбновите браузер, чтобы открывать документы в облаке или скачайте файл и откройте его на компьютере.Pamyatka_letchiku_Mi-24.pdfСкачать файлУстановите Яндекс.БраузерРегулярные обновленияБезопасностьСинхронизацияБраузер умеет автоматически обновляться до последней актуальной версии.Технология Protect проверяет сайты и файлы на вирусы, блокирует страницы мошенников.Режим Турбо при низкой скорости соединения ускоряет загрузку сайтов и экономит трафик.Скачать Яндекс.Браузер… // Дальше — docviewer.yandex.ruЧто такое "посадка с подрывом НВ"?
Полл> Что такое "посадка с подрывом НВ"?
это в случае посадки на авторотации, перед касанием шаг-газ берется на себя, вертолет тормозится но и обороты НВ падают быстро и если не угадать с высотой, можно упасть
это в случае посадки на авторотации, перед касанием шаг-газ берется на себя, вертолет тормозится но и обороты НВ падают быстро и если не угадать с высотой, можно упасть
А.Л.> это в случае посадки на авторотации, перед касанием шаг-газ берется на себя,
Я правильно понял - в данном документе используется аббревиатура ШО, ("шаг-обороты"?), для обозначение того же органа управления, что ты называешь "шаг-газ"?
А.Л.> вертолет тормозится но и обороты НВ падают быстро и если не угадать с высотой, можно упасть
Спасибо!
Меня смутило, что указан ресурс лопастей для подобного режима не менее 5 раз. Подумал, что это какой-то штатный режим эксплуатации.")
Я правильно понял - в данном документе используется аббревиатура ШО, ("шаг-обороты"?), для обозначение того же органа управления, что ты называешь "шаг-газ"?
А.Л.> вертолет тормозится но и обороты НВ падают быстро и если не угадать с высотой, можно упасть
Спасибо!
Меня смутило, что указан ресурс лопастей для подобного режима не менее 5 раз. Подумал, что это какой-то штатный режим эксплуатации.
")
А.Л.>> это в случае посадки на авторотации, перед касанием шаг-газ берется на себя,
Полл> Я правильно понял - в данном документе используется аббревиатура ШО, ("шаг-обороты"?), для обозначение того же органа управления, что ты называешь "шаг-газ"?
ну да, у нас так этот рычаг назывался, рычагом шаг меняется, а ручкой коррекция мощности двигателей правая или левая.
Полл> Меня смутило, что указан ресурс лопастей для подобного режима не менее 5 раз. Подумал, что это какой-то штатный режим эксплуатации.
в РЛЭ точно штатного такого режима нет, только при посадке на авторотации если в момент отказа обоих двигателей высота была меньше 100м, а скорость меньше 80км/ч, говорится что на высоте 15-20 метров вертикальная скорость гасится быстрым непрерывным увеличением общего шага с темпом 10-12 градусов в секунду, вот это и есть подрыв...
Полл> Я правильно понял - в данном документе используется аббревиатура ШО, ("шаг-обороты"?), для обозначение того же органа управления, что ты называешь "шаг-газ"?
ну да, у нас так этот рычаг назывался, рычагом шаг меняется, а ручкой коррекция мощности двигателей правая или левая.
Полл> Меня смутило, что указан ресурс лопастей для подобного режима не менее 5 раз. Подумал, что это какой-то штатный режим эксплуатации.
в РЛЭ точно штатного такого режима нет, только при посадке на авторотации если в момент отказа обоих двигателей высота была меньше 100м, а скорость меньше 80км/ч, говорится что на высоте 15-20 метров вертикальная скорость гасится быстрым непрерывным увеличением общего шага с темпом 10-12 градусов в секунду, вот это и есть подрыв...
Полл> Здесь тоже:
у вертушки нет выбора, а у тебя есть
Полл> "Флоувижн" подобные потоки считать не умеет.
жаль.. но наверняка же что-то сейчас появилось...
хотя всяким любительским конторам нередко и камер с трубой хватает -

Полл> Что за "гоночные ФПВ" с крыльями имеются в виду?
искал racing fpv, но сейчас почему-то ни один запрос в гугл не отдает того, что хочу увидеть
Ни aerodynamic body for racing quad, winged body for racing quad, ни что иное..
Там было что-то вроде (нарисовал)
Полл> Тандемы имеют много проблем с управлением. Добавлять к проблемам переходного режима проблемы управления тандемом в маршевом режиме у меня желания нет.
У тебя получается не чистый тандем, б управление не отклонением АД плоскостей, а разнотягом передней и задней пары движков. Плюс система стабилизации от квадры вполне может стабилизировать и тангаж тандема. В общем случае наиболее логичным вариантом видится именно тот или иной вариант тандема. Вплоть до
© WIP Quadcopter - Welcome to the SeeMeCNC Forum
Или схематично что-то в эту сторону -
Тут просто надо понимать, как поток обтекает квадру в ГП
В примитивном случае горизонтальной платформы и фюзеляж и "крло" будут тянуть только вниз
Отсюда и вывод о необходимости наклона.
Вообще аэродинамикой гоночных дронов давно озадачены, потому можно пытаться искать на эту тему

вот здесь неплохая визуализация того, от чего я пытался избавиться, рисуя тебе тот первый набросок

Exploring Drone Aerodynamics With Computers
For decades, NASA has used computer models to simulate the flow of air around aircraft in order to test designs and improve the performance of next-generation vehicles. At NASA’s Ames Research Center in California’s Silicon Valley, researchers recently used this technique to explore the aerodynamics of a popular example of a small, battery-powered drone, a modified DJI Phantom 3 quadcopter.
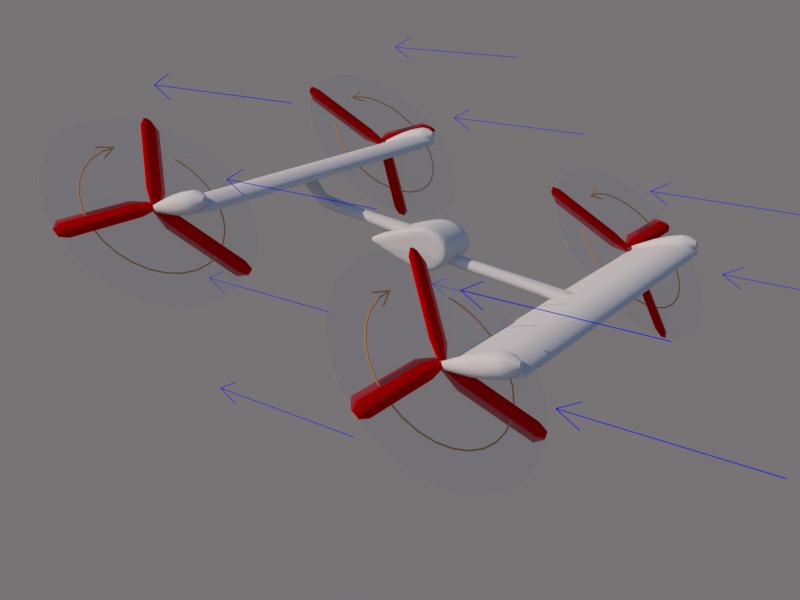
и что ты неизбежно будешь иметь, настаивая на классической схеме. Красные - уплотнения от удара отбрасываемого потока об элементы конструкции (перевод энергии мотора в шум), синее - разрежение, вихревые жгуты - и так понятно.
у вертушки нет выбора, а у тебя есть
Полл> "Флоувижн" подобные потоки считать не умеет.
жаль.. но наверняка же что-то сейчас появилось...
хотя всяким любительским конторам нередко и камер с трубой хватает -
Multirotor aerodynamics
Fluid mechanics research at University of Houston. Multirotor aerodynamics. Drone aerodynamics. Vertical axis wind turbines. Vortex dynamics. Urban wind energy // uharayalab.comПолл> Что за "гоночные ФПВ" с крыльями имеются в виду?
искал racing fpv, но сейчас почему-то ни один запрос в гугл не отдает того, что хочу увидеть
Ни aerodynamic body for racing quad, winged body for racing quad, ни что иное..
Там было что-то вроде (нарисовал)
Полл> Тандемы имеют много проблем с управлением. Добавлять к проблемам переходного режима проблемы управления тандемом в маршевом режиме у меня желания нет.
У тебя получается не чистый тандем, б управление не отклонением АД плоскостей, а разнотягом передней и задней пары движков. Плюс система стабилизации от квадры вполне может стабилизировать и тангаж тандема. В общем случае наиболее логичным вариантом видится именно тот или иной вариант тандема. Вплоть до
© WIP Quadcopter - Welcome to the SeeMeCNC Forum
Или схематично что-то в эту сторону -
Тут просто надо понимать, как поток обтекает квадру в ГП
В примитивном случае горизонтальной платформы и фюзеляж и "крло" будут тянуть только вниз
Отсюда и вывод о необходимости наклона.
Вообще аэродинамикой гоночных дронов давно озадачены, потому можно пытаться искать на эту тему
Aerodynamics in racing multirotors!
In this article I try to demonstrate how the aerodynamics of FPV racing multirotors could be enhanced. // www.flitetest.comвот здесь неплохая визуализация того, от чего я пытался избавиться, рисуя тебе тот первый набросок
Exploring Drone Aerodynamics with Computers
For decades, NASA has used computer models to simulate the flow of air around aircraft in order to test designs and improve the performance of next-generation vehicles. At NASA’s Ames Research Center, researchers recently used this technique to explore the aerodynamics of a popular battery-powered drone.. // www.nasa.govExploring Drone Aerodynamics With Computers
For decades, NASA has used computer models to simulate the flow of air around aircraft in order to test designs and improve the performance of next-generation vehicles. At NASA’s Ames Research Center in California’s Silicon Valley, researchers recently used this technique to explore the aerodynamics of a popular example of a small, battery-powered drone, a modified DJI Phantom 3 quadcopter.
и что ты неизбежно будешь иметь, настаивая на классической схеме. Красные - уплотнения от удара отбрасываемого потока об элементы конструкции (перевод энергии мотора в шум), синее - разрежение, вихревые жгуты - и так понятно.
Прикреплённые файлы:
Это сообщение редактировалось 03.09.2017 в 10:39
переходный режим посадки крылатой квадры - вполне логично такой: импульсом чуть убрать тягу 2 задних двигов - жопа начнет проваливаться, угол атаки крыла растет, сопротивление растет, скорость гасится, по мере гашения скорости и снижения К чуть добавлять общий газ, компенсируя нехватку игрека, а потом следующий импульс уменьшения тяги задних, и так по циклу. (для машинного автоуправления циклами и импульсами проще. вручную, конечно, необязательно)
Или сразу дать чуть больше тяги передним 2 моторам, но тогда профиль посадки будет не плавным, а как парашютирование после кабрирования.
С переходным от вертикала к горизонталу проще - импульсами добавлять тягу задних моторов, создавая наклон, так не будет явных провалов при смене вектора тяги, а по мере роста скорости крыло будет возмещать потерянную от наклона вертикальную составляющую тяги винтов.
Или сразу дать чуть больше тяги передним 2 моторам, но тогда профиль посадки будет не плавным, а как парашютирование после кабрирования.
С переходным от вертикала к горизонталу проще - импульсами добавлять тягу задних моторов, создавая наклон, так не будет явных провалов при смене вектора тяги, а по мере роста скорости крыло будет возмещать потерянную от наклона вертикальную составляющую тяги винтов.
Bredonosec> жаль.. но наверняка же что-то сейчас появилось...
Ради того, чтобы узнать, что есть полезного, разговор и завел.
Bredonosec> хотя всяким любительским конторам нередко и камер с трубой хватает -
Мне будет проще сделать экспериментальную модель и снимать параметры и обтекание прямо с нее.
Bredonosec> У тебя получается не чистый тандем, б управление не отклонением АД плоскостей, а разнотягом передней и задней пары движков.
Это еще сложнее для системы управления.
Bredonosec> и что ты неизбежно будешь иметь, настаивая на классической схеме. Красные - уплотнения от удара отбрасываемого потока об элементы конструкции (перевод энергии мотора в шум), синее - разрежение, вихревые жгуты - и так понятно.
Я информацию собираю, а не настаиваю.
Ради того, чтобы узнать, что есть полезного, разговор и завел.
Bredonosec> хотя всяким любительским конторам нередко и камер с трубой хватает -
Мне будет проще сделать экспериментальную модель и снимать параметры и обтекание прямо с нее.
Bredonosec> У тебя получается не чистый тандем, б управление не отклонением АД плоскостей, а разнотягом передней и задней пары движков.
Это еще сложнее для системы управления.
Bredonosec> и что ты неизбежно будешь иметь, настаивая на классической схеме. Красные - уплотнения от удара отбрасываемого потока об элементы конструкции (перевод энергии мотора в шум), синее - разрежение, вихревые жгуты - и так понятно.
Я информацию собираю, а не настаиваю.
А.Л.> ну да, у нас так этот рычаг назывался, рычагом шаг меняется, а ручкой коррекция мощности двигателей правая или левая.
После твоих слов у меня появилось мнение что "ШО" это "шаг общий".
А.Л.> в РЛЭ точно штатного такого режима нет, только... вот это и есть подрыв...
Ясно, спасибо!
После твоих слов у меня появилось мнение что "ШО" это "шаг общий".
А.Л.> в РЛЭ точно штатного такого режима нет, только... вот это и есть подрыв...
Ясно, спасибо!
А.Л.>> ну да, у нас так этот рычаг назывался, рычагом шаг меняется, а ручкой коррекция мощности двигателей правая или левая.
Полл> После твоих слов у меня появилось мнение что "ШО" это "шаг общий".
он общий и есть, т.е. меняет одновременно шаг у всех лопастей несущего винта независимо от положения лопасти относительно вектора движения вертолета. Ручкой управления тот же шаг меняется но уже в зависимости от того где находится лопасть - идет она навстречу потоку или уходит от него, расположена по оси вперед или назад, т.е. лопасть проходя по кругу меняет свой шаг в зависимости от положения ручки управления скажем на угол дельта, да плюс у нее от шаг-газа еще постоянный шаг на угол альфа. Дык вот от альфы зависит размер создаваемой НВ силы, а от дельты ее направление (наклон). В результат наклона возникают составляющие подъемная сила, тяга, боковая (на развороте) соответственно чем энергичнее маневр тем больше силы НВ тратится на боковые составляющие, и меньше на подъемную силу, в результате приходится увеличивать общий шаг, а топливно-регулирующая автоматика увеличивает подачу топлива в двигатели и соответственно их мощность, при условии что ручка на рычаге шаг-газ повернута в право (правая коррекция) если повернуть ее влево до упора то в полете вертолет перейдет на авторотацию, т.е. топливная автоматика отключится и генераторы кстати тоже, и необходимые обороты несущего винта нужно будет поддерживать за счет изменения общего шага НВ
Полл> После твоих слов у меня появилось мнение что "ШО" это "шаг общий".
он общий и есть, т.е. меняет одновременно шаг у всех лопастей несущего винта независимо от положения лопасти относительно вектора движения вертолета. Ручкой управления тот же шаг меняется но уже в зависимости от того где находится лопасть - идет она навстречу потоку или уходит от него, расположена по оси вперед или назад, т.е. лопасть проходя по кругу меняет свой шаг в зависимости от положения ручки управления скажем на угол дельта, да плюс у нее от шаг-газа еще постоянный шаг на угол альфа. Дык вот от альфы зависит размер создаваемой НВ силы, а от дельты ее направление (наклон). В результат наклона возникают составляющие подъемная сила, тяга, боковая (на развороте) соответственно чем энергичнее маневр тем больше силы НВ тратится на боковые составляющие, и меньше на подъемную силу, в результате приходится увеличивать общий шаг, а топливно-регулирующая автоматика увеличивает подачу топлива в двигатели и соответственно их мощность, при условии что ручка на рычаге шаг-газ повернута в право (правая коррекция) если повернуть ее влево до упора то в полете вертолет перейдет на авторотацию, т.е. топливная автоматика отключится и генераторы кстати тоже, и необходимые обороты несущего винта нужно будет поддерживать за счет изменения общего шага НВ
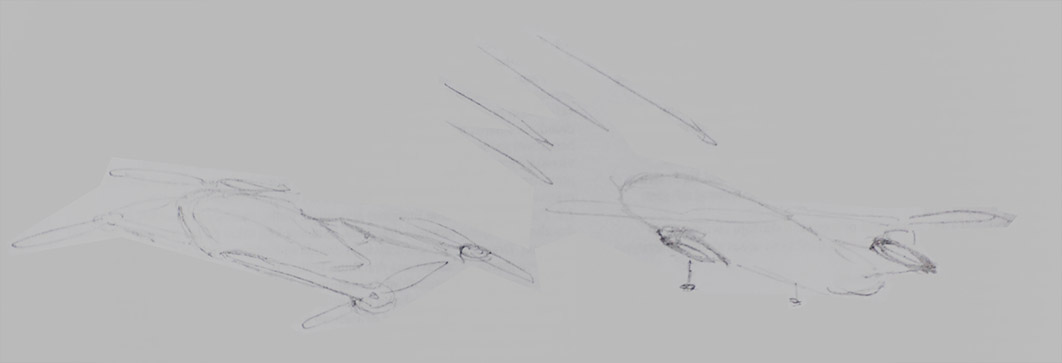
Полл> Мне будет проще сделать экспериментальную модель и снимать параметры и обтекание прямо с нее.
Примерно так. Нужно будет сколхозить узел перестановки крыла - менять его высоту относительно ЦТ и угол атаки. На оперении сверху будет стоять камера, если одной не хватит - две на законцовках оперения. На крыле наклеенные шелковички.
Примерно так. Нужно будет сколхозить узел перестановки крыла - менять его высоту относительно ЦТ и угол атаки. На оперении сверху будет стоять камера, если одной не хватит - две на законцовках оперения. На крыле наклеенные шелковички.
Прикреплённые файлы:
Полл> Кто кушал кактусы с попытками разгрузить крылом роторы квадриков на маршевых режимах - расскажите, какие проблемы вылазят?
Тебе сюда: Сергей Александров | ВКонтакте
АЛ-103М (тест-модель, тестирование законов управления для автопилота, проверка грузоподъёмности)
VTOL UAV rc test-model AL-103M
Тебе сюда: Сергей Александров | ВКонтакте
АЛ-103М (тест-модель, тестирование законов управления для автопилота, проверка грузоподъёмности)
VTOL UAV rc test-model AL-103M
Полл> Примерно так.
Может быть так?
Может быть так?
Прикреплённые файлы:
Полл>> Мне будет проще сделать экспериментальную модель и снимать параметры и обтекание прямо с нее.
100% не обещаю, но могу помочь в склейке, сварке, вывозе на испытания. Долгими зимними вечерами. Зима близко.
100% не обещаю, но могу помочь в склейке, сварке, вывозе на испытания. Долгими зимними вечерами. Зима близко.
Cormorant> Может быть так?
Я Бреду объяснил, почему не хочу связываться с тандемом.
И винты лучше по возможности как-то закрыть от ударов в горизонтальной плоскости.
Cormorant> 100% не обещаю, но
Ок.
Я Бреду объяснил, почему не хочу связываться с тандемом.
И винты лучше по возможности как-то закрыть от ударов в горизонтальной плоскости.
Cormorant> 100% не обещаю, но
Ок.
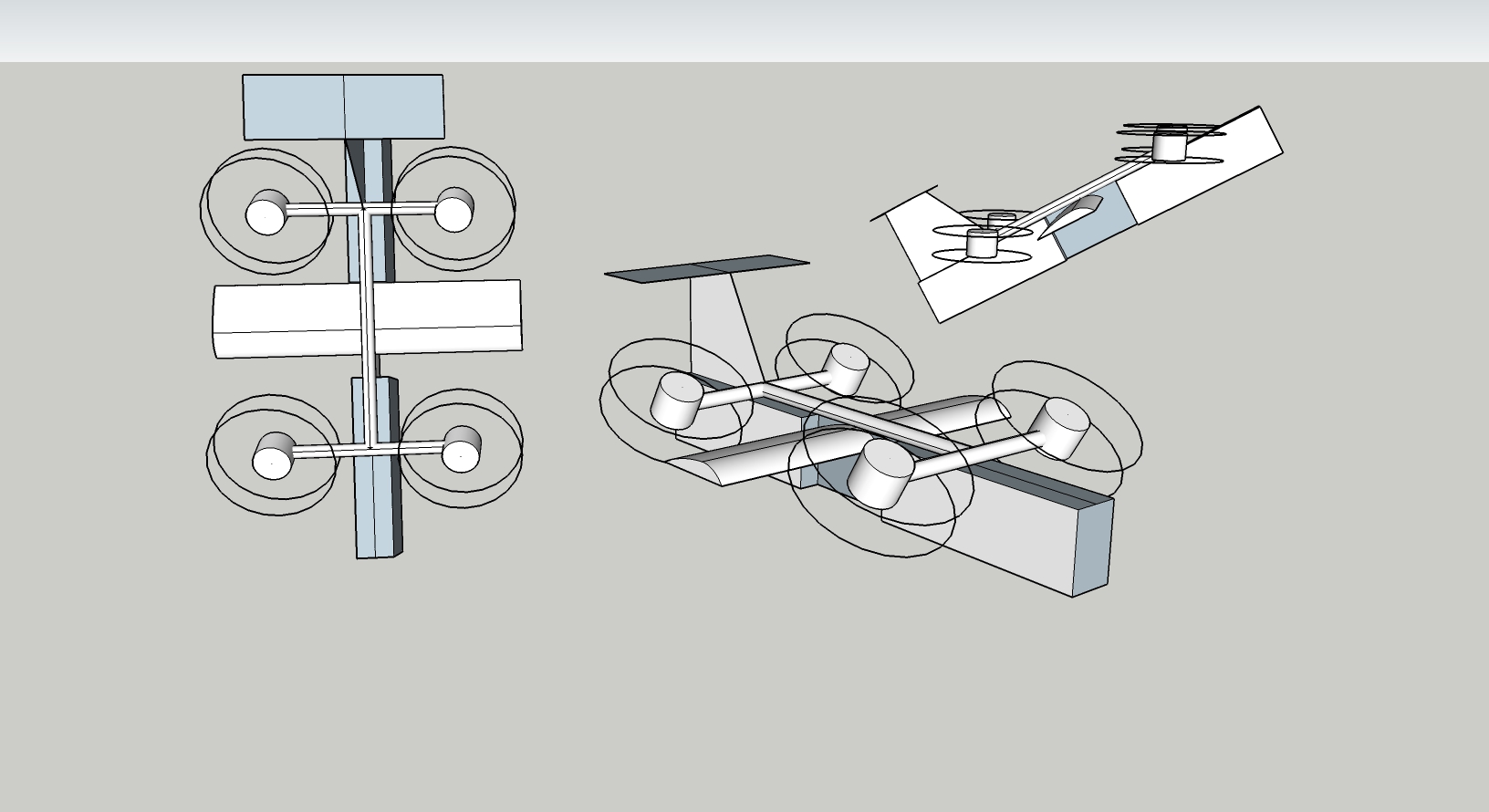
Cormorant>> Может быть так?
Полл> Я Бреду объяснил, почему не хочу связываться с тандемом.
Тогда, так.
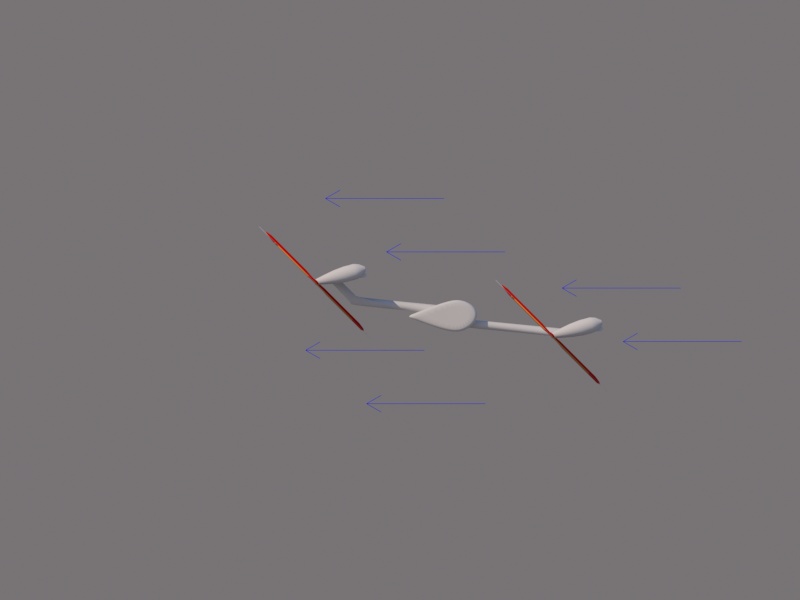
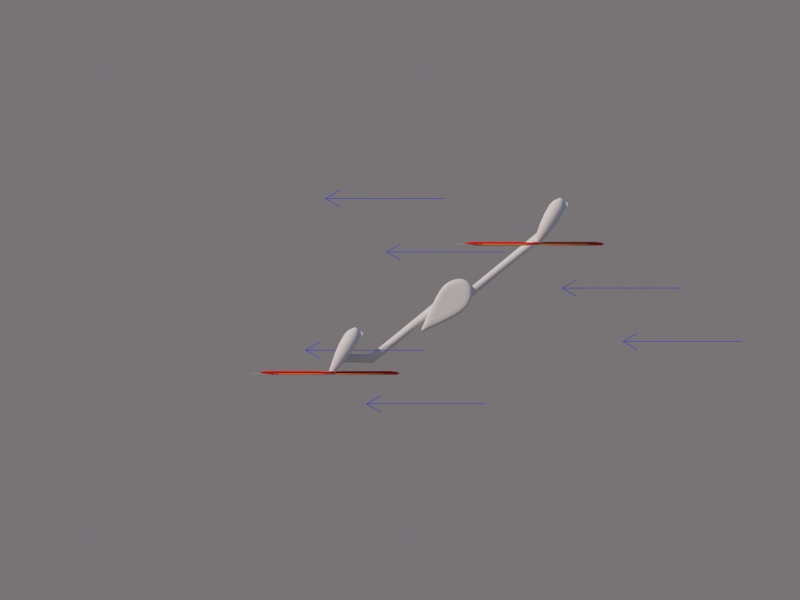
В обоих схемах оптимизация на горизонтальный полет с наименьшим лобовым сопротивлением.
Отдельный бонус: противовращающиеся винты на крыле снижают индуктивное сопротивление, что позволяет применить крыло очень небольшого удлинения. Соответственно, во второй схеме, продольные винты могут выродится до балансировочных.
Как тут:

Полл> Я Бреду объяснил, почему не хочу связываться с тандемом.
Тогда, так.
В обоих схемах оптимизация на горизонтальный полет с наименьшим лобовым сопротивлением.
Отдельный бонус: противовращающиеся винты на крыле снижают индуктивное сопротивление, что позволяет применить крыло очень небольшого удлинения. Соответственно, во второй схеме, продольные винты могут выродится до балансировочных.
Как тут:

Прикреплённые файлы:
Cormorant> В обоих схемах оптимизация на горизонтальный полет с наименьшим лобовым сопротивлением.
Если есть желание рисовать, то плоскость вращения винтов должна быть перпендикулярна продольной оси ВМГ.
И рисунок нужно обязательно дополнять взлетом, посадкой и стоянкой аппарата на земле.
Если есть желание рисовать, то плоскость вращения винтов должна быть перпендикулярна продольной оси ВМГ.
И рисунок нужно обязательно дополнять взлетом, посадкой и стоянкой аппарата на земле.
Полл> Если есть желание рисовать, то плоскость вращения винтов должна быть перпендикулярна продольной оси ВМГ.
Полл> И рисунок нужно обязательно дополнять взлетом, посадкой и стоянкой аппарата на земле.
Некогда объяснять
На этапе тестирования стоечки неубираемые, дальше с уборкой надо будет заморочиться
Полл> И рисунок нужно обязательно дополнять взлетом, посадкой и стоянкой аппарата на земле.
Некогда объяснять
На этапе тестирования стоечки неубираемые, дальше с уборкой надо будет заморочиться
Прикреплённые файлы:
Cormorant> Некогда объяснять
Экспериментальный ЛА должен позволять менять угол атаки ВМГ, установочный угол атаки крыла и его расположение относительно ЦМ ЛА, иметь возможность снимать картину обтекания крыла, быть рассчитанным на отказы и неправильную работу системы управления (в том числе чтобы было не страшно его разбить).
Экспериментальный ЛА должен позволять менять угол атаки ВМГ, установочный угол атаки крыла и его расположение относительно ЦМ ЛА, иметь возможность снимать картину обтекания крыла, быть рассчитанным на отказы и неправильную работу системы управления (в том числе чтобы было не страшно его разбить).


Полл> Экспериментальный ЛА должен позволять менять угол атаки ВМГ, установочный угол атаки крыла и его расположение относительно ЦМ ЛА, иметь возможность снимать картину обтекания крыла, быть рассчитанным на отказы и неправильную работу системы управления (в том числе чтобы было не страшно его разбить).
Дык ить, всё можно на этих летающих палках.
Костя, правильно сказал про неэффективность крыла посередине между винтами. Если ты затачиваешь аппарат под горизонтальный полёт, с разгрузкой винтов, то тебе надо ставить крыло в оптимальное положение для его работы в горизонтальном полёте.
Дык ить, всё можно на этих летающих палках.
Костя, правильно сказал про неэффективность крыла посередине между винтами. Если ты затачиваешь аппарат под горизонтальный полёт, с разгрузкой винтов, то тебе надо ставить крыло в оптимальное положение для его работы в горизонтальном полёте.
Bredonosec>> жаль.. но наверняка же что-то сейчас появилось...
Полл> Ради того, чтобы узнать, что есть полезного, разговор и завел.
Ну вот тот ролик из наса можно посчитать на Ansys или чем подобном.
Как пишут,
Твои возможности по мощностям я не знаю..
Полл> Мне будет проще сделать экспериментальную модель и снимать параметры и обтекание прямо с нее.
тоже вариант.. Хотя, снимая параметры с модели, имеющей классическую схему, потом на оптимальную мало что можно будет перенести, да и жалко будет проделанной работы, чтоб начинать всё с начала.
Bredonosec>> У тебя получается не чистый тандем, б управление не отклонением АД плоскостей, а разнотягом передней и задней пары движков.
Полл> Это еще сложнее для системы управления.
эээ... почему? Как понимаю, в квадрах есть какой-то сенсор, дающий вертикаль (на акселерометрах или чем). Добавляешь некий угол наклона, при котором крыло обтекается оптимально, и вот тебе крейсерский режим. Стабилизация на тем, или даже плавный выбор соотношения наклона-тяги для разных скоростей - конечно, придется просчитать или продуть, но работать будет.
Переходный режим при такой схеме вообще фактически отсутствует: хоть рывком переключаешь вертикаль с висения на круз (без добавки мощности, самый тупой вариант) - в первую секунду чуть просаживается, потом летит. Переход к висению - так же: тупо переключение вертикали, в первую секунду-две за счет остатков скорости чуть высоты возьмет, и затормозится до висения сам. Просто за счет углов.
Понятно, что с классической схемой автопилот может быть вообще механическим, насколько там всё просто, но оптимальные параметры дальности с текущей мощности так не получишь.
Полл> Я информацию собираю, а не настаиваю.
Полл> Ради того, чтобы узнать, что есть полезного, разговор и завел.
Ну вот тот ролик из наса можно посчитать на Ansys или чем подобном.
Как пишут,
CFD - численная гидродинамика. Метод решения сеточный. Грубо говоря, область вокруг объекта разбивается на малые объемы и в каждом объёме численно решается уравнение Навье-Стокса.
Какой конкретно здесь вычислительный пакет - не знаю.
Для этого счастья требуются большие вычислительные мощности и много времени)))
Твои возможности по мощностям я не знаю..
Полл> Мне будет проще сделать экспериментальную модель и снимать параметры и обтекание прямо с нее.
тоже вариант.. Хотя, снимая параметры с модели, имеющей классическую схему, потом на оптимальную мало что можно будет перенести, да и жалко будет проделанной работы, чтоб начинать всё с начала.
Bredonosec>> У тебя получается не чистый тандем, б управление не отклонением АД плоскостей, а разнотягом передней и задней пары движков.
Полл> Это еще сложнее для системы управления.
эээ... почему? Как понимаю, в квадрах есть какой-то сенсор, дающий вертикаль (на акселерометрах или чем). Добавляешь некий угол наклона, при котором крыло обтекается оптимально, и вот тебе крейсерский режим. Стабилизация на тем, или даже плавный выбор соотношения наклона-тяги для разных скоростей - конечно, придется просчитать или продуть, но работать будет.
Переходный режим при такой схеме вообще фактически отсутствует: хоть рывком переключаешь вертикаль с висения на круз (без добавки мощности, самый тупой вариант) - в первую секунду чуть просаживается, потом летит. Переход к висению - так же: тупо переключение вертикали, в первую секунду-две за счет остатков скорости чуть высоты возьмет, и затормозится до висения сам. Просто за счет углов.
Понятно, что с классической схемой автопилот может быть вообще механическим, насколько там всё просто, но оптимальные параметры дальности с текущей мощности так не получишь.
Полл> Я информацию собираю, а не настаиваю.
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
Cormorant> Отдельный бонус: противовращающиеся винты на крыле снижают индуктивное сопротивление, что позволяет применить крыло очень небольшого удлинения. Соответственно, во второй схеме, продольные винты могут выродится до балансировочных.
тогда по идее логичнее оставить только третий сзади.. Чтоб поток с переднего не шел на крыло. ЦТ чуть стянуть назад, чтоб варьированием тяги заднего компенсировать смену точки ЦД на профиле при разных углах атаки, и еще оставался запас на быстрые маневры по тангажу.
тогда по идее логичнее оставить только третий сзади.. Чтоб поток с переднего не шел на крыло. ЦТ чуть стянуть назад, чтоб варьированием тяги заднего компенсировать смену точки ЦД на профиле при разных углах атаки, и еще оставался запас на быстрые маневры по тангажу.
Copyright © Balancer 1997..2019
Создано 16.08.2010
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 16.08.2010
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}