 apakhom
apakhom
 инфо
инфо инструменты
инструменты Xan
Xan







 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/dr/dropboxusercontent/dl/u/6706516/128x128-crop/H0.0003.png)
Отважным Изобретателям Грузика посвящается!
Теги:

SashaMaks>> Это вечером, сейчас в дороге...
Mihail66> Годится!
Уже не в первый раз повторяетесь")
Точно такой же спор был в ноябре

SashaMaks отлично все посчитал и подтвердил...
Mihail66> Годится!
Уже не в первый раз повторяетесь
")
Точно такой же спор был в ноябре
Обсуждение испытаний и пусков ракет [SashaMaks#16.11.20 17:14]
… Очень похоже на отклонённый вектор тяги. Можешь детально сфотографировать двигатель и особенно его сопловый блок в разобранном виде? … Пока ещё раз задам очень простой вопрос, на который желательно ответить с помощью хотя бы фото: как располагался и фиксировался датчик MPU6050 и плата, на которой он находится, внутри корпуса ракеты? По данным со всех осей, видны последствия нутационных вращений корпуса ракеты для обоих акселерометров, и на видео это хорошо видно - спиральная траектория…// РакетомодельныйSashaMaks отлично все посчитал и подтвердил...



apakhom> SashaMaks отлично все посчитал и подтвердил...
Я помню эти споры. Но у меня сейчас не сходится.
Разница примерно в 100м по высоте, и 5сек. по времени полета. Подозреваю что это из-за наклонной траектории.
Я помню эти споры. Но у меня сейчас не сходится.
Разница примерно в 100м по высоте, и 5сек. по времени полета. Подозреваю что это из-за наклонной траектории.

Mihail66> Даю реальные полетные данные. Ускорение в дециметрах, 1g не вычтен.
Получается на 17.5 секунде.
Файл может быть кривой, потому что у меня не офис.
Mihail66> Разница примерно в 100м по высоте, и 5сек. по времени полета. Подозреваю что это из-за наклонной траектории.
Ну, блин! Вся тема про то, что "грузик" всегда будет работать криво!!!
Получается на 17.5 секунде.
Файл может быть кривой, потому что у меня не офис.
Mihail66> Разница примерно в 100м по высоте, и 5сек. по времени полета. Подозреваю что это из-за наклонной траектории.
Ну, блин! Вся тема про то, что "грузик" всегда будет работать криво!!!

Прикреплённые файлы:
R63.xls (скачать)
[249 кБ]

16.07.2021 15:09, SashaMaks: -1: Ошибка при обработке данных - не проверил дифференциал функции ускорения, пропустил потерю данных, сделал ошибочный расчёт и неправильные выводы.
Xan> Получается на 17.5 секунде.
И у меня такая же хрень, а апогей на самом деле на 22-й секунде. Причем это и по барометру и по акселерометру (где величина ускорения наиболее приближена к нулю).
Xan> Ну, блин! Вся тема про то, что "грузик" всегда будет работать криво!!!
Криво, но не на столько же.
Я хочу чтобы Саша еще и высоту определил, путь даже криво, ±100м.
И у меня такая же хрень, а апогей на самом деле на 22-й секунде. Причем это и по барометру и по акселерометру (где величина ускорения наиболее приближена к нулю).
Xan> Ну, блин! Вся тема про то, что "грузик" всегда будет работать криво!!!
Криво, но не на столько же.
Я хочу чтобы Саша еще и высоту определил, путь даже криво, ±100м.
EG54>> Рычаги 1 и 2 повернуться наружу, совершив поворот на 90 градусов, по ходу вращения.
Tayfur> Предлагаю другой вариант этого стимпанка.
Ну вот, значит задумка стоит не только предчувствия копчика? Безразличное равновесие на вертикали полета и срабатывание от центробежной силы в апогее. Но копчик ноет, что-то возможно упускается из виду.
Но от длинных штоков отказался, тяжелы и инертны( хотя такой вариант пробовал). И нужно очень точное изготовление, что с массивными деталями не просто. Да и длина должна быть почти на всю длину корпуса. Чем длиннее, тем чувствительнее. А леска легкая и обеспечиват работоспособность. Когда удается леску настроить почти идеально, то срабатывание от вертикали происходит почти в горизонте(т.е. идеально для парашюта). Когда происходит перетяг, даже чуть чуть одной из сторон лески, то срабатывание уже в районе 135 градусов от вертикали. Собственно эта натяжка и есть пока спотыкач.
Tayfur> Предлагаю другой вариант этого стимпанка.
Ну вот, значит задумка стоит не только предчувствия копчика? Безразличное равновесие на вертикали полета и срабатывание от центробежной силы в апогее. Но копчик ноет, что-то возможно упускается из виду.
Но от длинных штоков отказался, тяжелы и инертны( хотя такой вариант пробовал). И нужно очень точное изготовление, что с массивными деталями не просто. Да и длина должна быть почти на всю длину корпуса. Чем длиннее, тем чувствительнее. А леска легкая и обеспечиват работоспособность. Когда удается леску настроить почти идеально, то срабатывание от вертикали происходит почти в горизонте(т.е. идеально для парашюта). Когда происходит перетяг, даже чуть чуть одной из сторон лески, то срабатывание уже в районе 135 градусов от вертикали. Собственно эта натяжка и есть пока спотыкач.
EG54>> Но , что реально происходит в апогее....
SashaMaks> Невесомость.
Саша, но ведь идеология темы основана на том, что при полете в атмосфере эта невесомость в апогее не наступает. Общемировое мнение, если так можно сказать. И в видео доказано.
Твое ранее объяснение естественно не помню, наверное для лирика было много непонятных измов.
SashaMaks> Невесомость.
Саша, но ведь идеология темы основана на том, что при полете в атмосфере эта невесомость в апогее не наступает. Общемировое мнение, если так можно сказать. И в видео доказано.
Твое ранее объяснение естественно не помню, наверное для лирика было много непонятных измов.
Это сообщение редактировалось 14.07.2021 в 18:06
Mihail66> Криво, но не на столько же.
Если ракета летела криво, то из твоего ускорения надо вычитать не 9.81, а меньше.
И тогда точка с нулевой скоростью отъедет по времени дальше.
Чтоб получить 22 секунды, надо наклонить градусов на 40.
Если ракета летела криво, то из твоего ускорения надо вычитать не 9.81, а меньше.
И тогда точка с нулевой скоростью отъедет по времени дальше.
Чтоб получить 22 секунды, надо наклонить градусов на 40.
EG54>... идеология темы основана на том, что при полете в атмосфере эта невесомость в апогее не наступает. Общемировое мнение, если так можно сказать. И в видео доказано.
Отсутствует абсолютная невесомость, но величина ускорения максимально приближается к нулевому значению. И эту особенность атмосферного полета вполне можно использовать для детектирования апогея.
В электронном исполнении это работает. Можно чесать репу над воплощением этого "феномена" в механике. Другой вопрос, а нахрена?
Апогей мы поймали, а вот высоту таким образом мы все равно определить не сумеем. Заменив аксель на барометр решаются сразу обе задачи.
Отсутствует абсолютная невесомость, но величина ускорения максимально приближается к нулевому значению. И эту особенность атмосферного полета вполне можно использовать для детектирования апогея.
В электронном исполнении это работает. Можно чесать репу над воплощением этого "феномена" в механике. Другой вопрос, а нахрена?
Апогей мы поймали, а вот высоту таким образом мы все равно определить не сумеем. Заменив аксель на барометр решаются сразу обе задачи.
Xan> Чтоб получить 22 секунды, надо наклонить градусов на 40.
Верно говоришь, если вычитать меньше чем 9,81, тогда все срастается. Спасибо за пояснение.
Димка даже транспортир на траекторию взлета прикладывал. Определил, что после схода с рельсы угол был примерно 77*. Хрензнат как этот угол менялся на всей дистанции, но апогей случился на удалении 1,5км от стартовой в проекции, при том что высота составила 2,6км.
И поэтому ..."грузик" всегда будет работать криво!!!"
Верно говоришь, если вычитать меньше чем 9,81, тогда все срастается. Спасибо за пояснение.
Димка даже транспортир на траекторию взлета прикладывал. Определил, что после схода с рельсы угол был примерно 77*. Хрензнат как этот угол менялся на всей дистанции, но апогей случился на удалении 1,5км от стартовой в проекции, при том что высота составила 2,6км.
И поэтому ..."грузик" всегда будет работать криво!!!"
EG54>>... идеология темы основана на том, что при полете в атмосфере эта невесомость в апогее не
Mihail66> Отсутствует абсолютная невесомость, но величина ускорения максимально приближается к нулевому значению.
В одном из видео австралийцев, где грузик вода, было видно, что вода в апогее находилась в голове. А когда ракета легла в горизонт, то из всей массы воды только тонкий язычек воды лег на боковой борт( вытек из общей массы воды на борт обращенный к земле). Что , мне кажется, говорит о том, что в борьбе невесомости и аэросопротивления с явным переревесом побеждает аэросопротивление и эта величина для невесомости далека от нуля. Не ясно, как аксель среди нескольких скачков ускорений с разными знаками поймет, что событие-это апогей.
Mihail66> Отсутствует абсолютная невесомость, но величина ускорения максимально приближается к нулевому значению.
В одном из видео австралийцев, где грузик вода, было видно, что вода в апогее находилась в голове. А когда ракета легла в горизонт, то из всей массы воды только тонкий язычек воды лег на боковой борт( вытек из общей массы воды на борт обращенный к земле). Что , мне кажется, говорит о том, что в борьбе невесомости и аэросопротивления с явным переревесом побеждает аэросопротивление и эта величина для невесомости далека от нуля. Не ясно, как аксель среди нескольких скачков ускорений с разными знаками поймет, что событие-это апогей.
Mihail66> И поэтому [i]..."грузик" всегда будет работать криво!!!"
Именно этим и хочу воспользоваться. Чем кривее окружность, тем лучше.
Именно этим и хочу воспользоваться. Чем кривее окружность, тем лучше.
EG54> ...Что , мне кажется, говорит о том, что в борьбе невесомости и аэросопротивления с явным переревесом побеждает аэросопротивление и эта величина для невесомости далека от нуля.
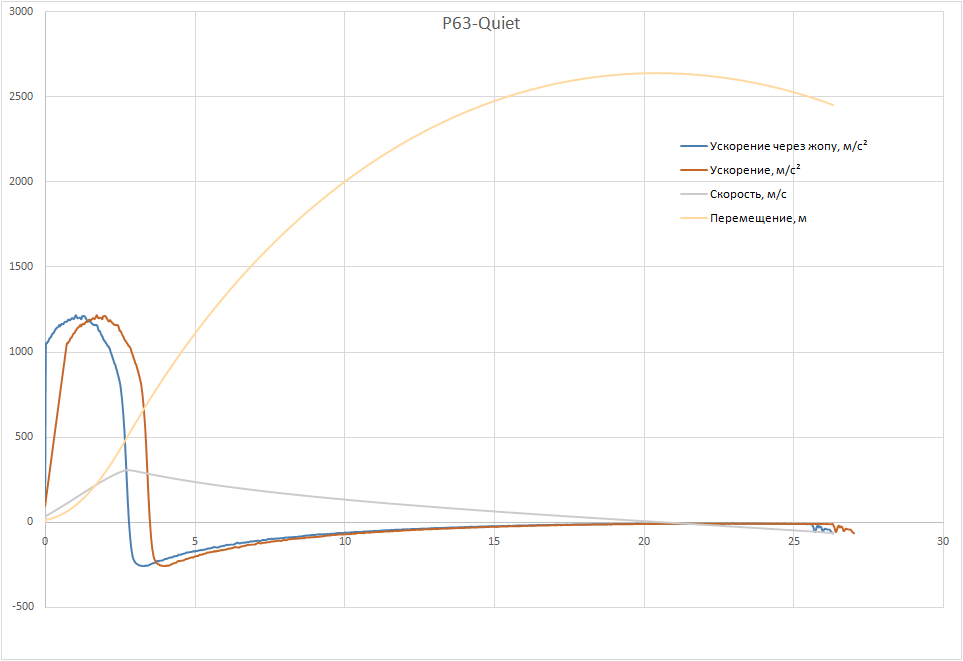
Правильно понимаешь. Но я ведь не говорю, что ускорение на столько мало, что эту величину можно считать невесомостью. А говорю я о том, что в апогее величина ускорения максимально приближена к нулевой точке, и нужно лишь за нее ухватиться. Например в моем последнем полете величина ускорения в апогее составляет лишь -0,7м/с2. Кто хочет рассмотреть это под лупой, то вот я специально увеличил (см. картинку).
EG54> Не ясно, как аксель среди нескольких скачков ускорений с разными знаками поймет, что событие-это апогей.
Ну как "как", вот здесь я продемонстрировал как это выглядит (зеленая линия).

Начинаем следить за изменением ускорения через секунду после прекращения тяги, и приходим к апогею.
Правильно понимаешь. Но я ведь не говорю, что ускорение на столько мало, что эту величину можно считать невесомостью. А говорю я о том, что в апогее величина ускорения максимально приближена к нулевой точке, и нужно лишь за нее ухватиться. Например в моем последнем полете величина ускорения в апогее составляет лишь -0,7м/с2. Кто хочет рассмотреть это под лупой, то вот я специально увеличил (см. картинку).
EG54> Не ясно, как аксель среди нескольких скачков ускорений с разными знаками поймет, что событие-это апогей.
Ну как "как", вот здесь я продемонстрировал как это выглядит (зеленая линия).
Обсуждение испытаний и пусков ракет [Mihail66#28.06.21 12:03]
С Сашей можно очень долго лясы точить, но пользы от этого никакой. Пожалуй нужно рассказать о том, ради чего делался этот полет, помимо самого полета. Запуски ракет и испытания [Mihail66#28.06.21 09:54] Воскресный запуск P63-Quiet прошел с жестким приземлением. Благодаря тому, что в алгоритм полета намеренно была установлена пятисекундная задержка на выброс парашюта, у него порвало почти все стропы (амортизатора не было). Ракета спускалась плашмя со скоростью более 20м/с, размахивая в полете…// РакетомодельныйНачинаем следить за изменением ускорения через секунду после прекращения тяги, и приходим к апогею.
Прикреплённые файлы:
Это сообщение редактировалось 14.07.2021 в 22:41
Mihail66>> Даю реальные полетные данные. Ускорение в дециметрах, 1g не вычтен.
Xan> Получается на 17.5 секунде.
Xan> Файл может быть кривой, потому что у меня не офис.
Mihail66>> Разница примерно в 100м по высоте, и 5сек. по времени полета. Подозреваю что это из-за наклонной траектории.
Xan> Ну, блин! Вся тема про то, что "грузик" всегда будет работать криво!!!
Грузик!!!
Работает криво!!!
Это ваша электроника работает криво!
И картинка для подумать...
Xan> Получается на 17.5 секунде.
Xan> Файл может быть кривой, потому что у меня не офис.
Mihail66>> Разница примерно в 100м по высоте, и 5сек. по времени полета. Подозреваю что это из-за наклонной траектории.
Xan> Ну, блин! Вся тема про то, что "грузик" всегда будет работать криво!!!
Грузик!!! Работает криво!!! Это ваша электроника работает криво!
И картинка для подумать...
Прикреплённые файлы:
Mihail66> Даю реальные полетные данные.
Данные не валидны, так как их часть по ускорению потеряна. Алгоритм кривой, нарушена сихронизация по времени или ещё что-то. ХЗ.
Данные не валидны, так как их часть по ускорению потеряна. Алгоритм кривой, нарушена сихронизация по времени или ещё что-то. ХЗ.
SashaMaks> Данные не валидны, так как их часть по ускорению потеряна. Алгоритм кривой, нарушена сихронизация по времени или ещё что-то. ХЗ.
Ага!, значит если мы считаем не от нуля, то уже ничего не посчитаем!
Данные ускорения для первых 15 метров полета действительно отсутствуют, сэкономил место в EEROM (детектор старта срабатывает на высоте 15м и от этой точки начинается запись). Значит для работы по акселерометру необходимо вернуть в алгоритм запись предстартовых данных.
А вот про синхронизацию по времени я что-то не понял. Это ты о чем?
Ну а если мы все же выбросим этот кусок. Будем считать что ракета стартует с высоты 15м с некоторой начальной скоростью (пусть она как вторая ступень), то тогда расчет сойдется?
Ага!, значит если мы считаем не от нуля, то уже ничего не посчитаем!
Данные ускорения для первых 15 метров полета действительно отсутствуют, сэкономил место в EEROM (детектор старта срабатывает на высоте 15м и от этой точки начинается запись). Значит для работы по акселерометру необходимо вернуть в алгоритм запись предстартовых данных.
А вот про синхронизацию по времени я что-то не понял. Это ты о чем?
Ну а если мы все же выбросим этот кусок. Будем считать что ракета стартует с высоты 15м с некоторой начальной скоростью (пусть она как вторая ступень), то тогда расчет сойдется?

Tayfur
втянувшийся
Mihail66> Верно говоришь, если вычитать меньше чем 9,81, тогда все срастается. Спасибо за пояснение.
Аксель даёт же ещё и поворот/наклон по осям. Нужно считать с ними, там всякими синусами косинусами или квантерионами (это для меня пока ругательное слово). И тут стандартный Ардуино слаб. Нужно что-то более скорострельное.
Аксель даёт же ещё и поворот/наклон по осям. Нужно считать с ними, там всякими синусами косинусами или квантерионами (это для меня пока ругательное слово). И тут стандартный Ардуино слаб. Нужно что-то более скорострельное.
Mihail66>> Верно говоришь, если вычитать меньше чем 9,81, тогда все срастается. Спасибо за пояснение.
Tayfur> Аксель даёт же ещё и поворот/наклон по осям. ...
Ну вот это как раз мне и не ясно. Ракета никогда не летит строго вертикально, причем угол наклона в полете меняется. И если нужно вычитать строго 9,81, то по мне это неправильно. Тут уже встает задачка с определением ориентации ракеты в пространстве. Все становится сложно.
Tayfur> Аксель даёт же ещё и поворот/наклон по осям. ...
Ну вот это как раз мне и не ясно. Ракета никогда не летит строго вертикально, причем угол наклона в полете меняется. И если нужно вычитать строго 9,81, то по мне это неправильно. Тут уже встает задачка с определением ориентации ракеты в пространстве. Все становится сложно.
Tayfur
втянувшийся
EG54> В одном из видео австралийцев, где грузик вода, было видно, что вода в апогее находилась в голове. А когда ракета легла в горизонт, то из всей массы воды только тонкий язычек воды лег на боковой борт( вытек из общей массы воды на борт обращенный к земле). Что , мне кажется, говорит о том, что в борьбе невесомости и аэросопротивления с явным переревесом побеждает аэросопротивление и эта величина для невесомости далека от нуля. Не ясно, как аксель среди нескольких скачков ускорений с разными знаками поймет, что событие-это апогей.
Для акселя в коде можно делать фильтр данных. При желании в программе можно прописать алгоритмы определения этапов полёта. Для корректной работы БРЭО это даже необходимо. При этом нужно учесть возможные аварийные этапы полёта.
Такое-же частично можно предусмотреть и в грузике. Например приделать тормоз на время работы двигателя. Только если что менять в алгоритме, то в коде просто кнопки понажимать, а в грузике всю ракету переделывать.
Для акселя в коде можно делать фильтр данных. При желании в программе можно прописать алгоритмы определения этапов полёта. Для корректной работы БРЭО это даже необходимо. При этом нужно учесть возможные аварийные этапы полёта.
Такое-же частично можно предусмотреть и в грузике. Например приделать тормоз на время работы двигателя. Только если что менять в алгоритме, то в коде просто кнопки понажимать, а в грузике всю ракету переделывать.
Прикреплённые файлы:
Mihail66> А вот про синхронизацию по времени я что-то не понял. Это ты о чем?
Про потерю данных, что ты там налепил, мне не известно.
А вот на акселерометре можно ракеты запускать хоть на 1м, хоть на 100км и не бояться, что какой-то ветерок может бомбануть двигатель на старте везле тебя с массой топлива энного количества кг.
Mihail66> Ну а если мы все же выбросим этот кусок. Будем считать что ракета стартует с высоты 15м с некоторой начальной скоростью (пусть она как вторая ступень), то тогда расчет сойдется?
Нет, потеряны данные о количестве энергии, их не вернуть и не заменить ничем.
Про потерю данных, что ты там налепил, мне не известно.
А вот на акселерометре можно ракеты запускать хоть на 1м, хоть на 100км и не бояться, что какой-то ветерок может бомбануть двигатель на старте везле тебя с массой топлива энного количества кг.

Mihail66> Ну а если мы все же выбросим этот кусок. Будем считать что ракета стартует с высоты 15м с некоторой начальной скоростью (пусть она как вторая ступень), то тогда расчет сойдется?
Нет, потеряны данные о количестве энергии, их не вернуть и не заменить ничем.

Tayfur> Для акселя в коде можно делать фильтр данных.
Для простого сумматора и это будет лишним.
Для простого сумматора и это будет лишним.
Mihail66>>> Верно говоришь, если вычитать меньше чем 9,81, тогда все срастается. Спасибо за пояснение.
Tayfur>> Аксель даёт же ещё и поворот/наклон по осям. ...
Mihail66> Ну вот это как раз мне и не ясно. Ракета никогда не летит строго вертикально, причем угол наклона в полете меняется. И если нужно вычитать строго 9,81, то по мне это неправильно.
Количество энергии, потраченное на разгон, вычисляется с минимальным отклонением вектора g от вертикали, то и вычитаться до 0 должно с таким же минимальным отклонением, чтобы попасть в 0 в нужное время, поэтому отклонение вектора g от вертикали на пассивном участке полета не имеет значения.
Tayfur>> Аксель даёт же ещё и поворот/наклон по осям. ...
Mihail66> Ну вот это как раз мне и не ясно. Ракета никогда не летит строго вертикально, причем угол наклона в полете меняется. И если нужно вычитать строго 9,81, то по мне это неправильно.
Количество энергии, потраченное на разгон, вычисляется с минимальным отклонением вектора g от вертикали, то и вычитаться до 0 должно с таким же минимальным отклонением, чтобы попасть в 0 в нужное время, поэтому отклонение вектора g от вертикали на пассивном участке полета не имеет значения.
SashaMaks> Про потерю данных, что ты там налепил, мне не известно.
Запись полетных данных начиналась с высоты 15м.
SashaMaks> А вот на акселерометре можно ракеты запускать хоть на 1м, хоть на 100км и не бояться, что какой-то ветерок может бомбануть двигатель на старте везле тебя с массой топлива энного количества кг.
Если использовать акселерометр в качестве детектора старта, то все равно придется устанавливать ограничение. В этом полете примерно так и было. У акселя был установлен порог в 1,5g для определения старта.
SashaMaks> Нет, потеряны данные о количестве энергии, их не вернуть и не заменить ничем.
Я уже это понял. Но поскольку этот полет не предполагал такую методику определения апогея, то я об этом и заботился. Знал бы, то хоть джампер на веревочке прицепил.
Запись полетных данных начиналась с высоты 15м.
SashaMaks> А вот на акселерометре можно ракеты запускать хоть на 1м, хоть на 100км и не бояться, что какой-то ветерок может бомбануть двигатель на старте везле тебя с массой топлива энного количества кг.
Если использовать акселерометр в качестве детектора старта, то все равно придется устанавливать ограничение. В этом полете примерно так и было. У акселя был установлен порог в 1,5g для определения старта.
SashaMaks> Нет, потеряны данные о количестве энергии, их не вернуть и не заменить ничем.
Я уже это понял. Но поскольку этот полет не предполагал такую методику определения апогея, то я об этом и заботился. Знал бы, то хоть джампер на веревочке прицепил.
SashaMaks>.... поэтому отклонение вектора g от вертикали на пассивном участке полета не имеет значения.
Выходит что точность твоего метода сильно привязана к удержанию вертикали на разгоне, а сделать это затруднительно. Причем вертикаль придется выдерживать еще и для второй ступени, а это почти не реально.
Я тут как-то стремлюсь выжать по максимуму, чтобы продлить эту вертикаль для второй ступени (нулевой запас устойчивости, закрутка), а ты как собираешься эту проблему решать?
Выходит что точность твоего метода сильно привязана к удержанию вертикали на разгоне, а сделать это затруднительно. Причем вертикаль придется выдерживать еще и для второй ступени, а это почти не реально.
Я тут как-то стремлюсь выжать по максимуму, чтобы продлить эту вертикаль для второй ступени (нулевой запас устойчивости, закрутка), а ты как собираешься эту проблему решать?
Tayfur> Такое-же частично можно предусмотреть и в грузике. Например приделать тормоз на время работы двигателя.
Грузик тормоз по твоему рисунку не нужен. Система не выходит из безразличного равновесия при вертикальных ускорениях. Такую схему пробовал, но болтающийся грузике на леске уносит к борту при вращении вокруг вертикальной оси. Грузики помещал в корпус шприца. Но при вращении сила трения грузика о стенку шприца уже значительна. Поэтому из жесткого диска взял подшипниковый узел, с низкой величиной трения, выкинул обмотку, вместо неё поместил грузик. Теперь всё жестко и чувствительно для возрастания ускорения при вращении вокруг Цт.
Но смущает возможность отклонения от вертикали при полете. Не выведет ли систему из без. равновесия. Тут вероятно тормоз и пригодится.
Грузик тормоз по твоему рисунку не нужен. Система не выходит из безразличного равновесия при вертикальных ускорениях. Такую схему пробовал, но болтающийся грузике на леске уносит к борту при вращении вокруг вертикальной оси. Грузики помещал в корпус шприца. Но при вращении сила трения грузика о стенку шприца уже значительна. Поэтому из жесткого диска взял подшипниковый узел, с низкой величиной трения, выкинул обмотку, вместо неё поместил грузик. Теперь всё жестко и чувствительно для возрастания ускорения при вращении вокруг Цт.
Но смущает возможность отклонения от вертикали при полете. Не выведет ли систему из без. равновесия. Тут вероятно тормоз и пригодится.
Прикреплённые файлы:
Это сообщение редактировалось 15.07.2021 в 11:27
Реклама Google — средство выживания форумов :)
 pinko
pinko

Важное примечание: этот пост предназначен для Михаила, не буду спорить и отвечать другим участникам!
Чтобы не потерять информацию, вам нужен FIFO буфер в РАМ-е при запуске, старт определяется по последним значениям. Как только старт обнаружен, начинается запись и записываете весь фильтр в память, включая самые ранние значения - таким образом не потеряеш информацию.
Для точности акселерометра - вот некоторые вопросы, которые следует принять во внимание:
1. про проблему с отклонением от вертикали вам уже известно
2. поскольку большинство датчиков работают с максимальной частотой 500 Гц, многие данные неправильно интегрируются, потому что для правильной интеграции необходимо знать точную фазу траектории и математическое описание траектории.
3. При высоких частотах дискретизации, цифровые акселерометры, как известно, шумные - 5-6 бит при 12-13-битное дополнение до 2 - ето уже много потерянной информации.
4. Аналоговые датчики печально известны длительным температурным дрейфом для нулевого значения.
5. Цифровые датчики высокого g в основном представляют собой 12-13-битное дополнение до 2. При таком квантовании возникает та же проблема, что и с потерянными таймфреймами. 3-4 бита, потерянные из-за шума при высоком g, и 3-4 бита при низком g - не одно и то же, и они не компенсирует друг друга.
6. Датчики с низким ускорением более точны, но потеря информации в моменты высокого ускорения вызовет дополнительные проблемы.
7. Также есть ошибка данных из-за центробежных сил.
Все эти факторы влияют на общую ошибку. Если один способ определения апогея точнее другого - оставляю за сам решать.
Про того преимущества, что акселерометры работают в вакууме - сначала создайте ракету, которая отправится в открытый космос, а затем подумайте об этой проблеме.
Делайте то, что наиболее надежно и просто в работе - на мой взгляд, используйте барометрический датчик, чтобы определять изменения давления, акселерометра только для блокировки ошибочные решения.
Чтобы не потерять информацию, вам нужен FIFO буфер в РАМ-е при запуске, старт определяется по последним значениям. Как только старт обнаружен, начинается запись и записываете весь фильтр в память, включая самые ранние значения - таким образом не потеряеш информацию.
Для точности акселерометра - вот некоторые вопросы, которые следует принять во внимание:
1. про проблему с отклонением от вертикали вам уже известно
2. поскольку большинство датчиков работают с максимальной частотой 500 Гц, многие данные неправильно интегрируются, потому что для правильной интеграции необходимо знать точную фазу траектории и математическое описание траектории.
3. При высоких частотах дискретизации, цифровые акселерометры, как известно, шумные - 5-6 бит при 12-13-битное дополнение до 2 - ето уже много потерянной информации.
4. Аналоговые датчики печально известны длительным температурным дрейфом для нулевого значения.
5. Цифровые датчики высокого g в основном представляют собой 12-13-битное дополнение до 2. При таком квантовании возникает та же проблема, что и с потерянными таймфреймами. 3-4 бита, потерянные из-за шума при высоком g, и 3-4 бита при низком g - не одно и то же, и они не компенсирует друг друга.
6. Датчики с низким ускорением более точны, но потеря информации в моменты высокого ускорения вызовет дополнительные проблемы.
7. Также есть ошибка данных из-за центробежных сил.
Все эти факторы влияют на общую ошибку. Если один способ определения апогея точнее другого - оставляю за сам решать.
Про того преимущества, что акселерометры работают в вакууме
- сначала создайте ракету, которая отправится в открытый космос, а затем подумайте об этой проблеме. Делайте то, что наиболее надежно и просто в работе - на мой взгляд, используйте барометрический датчик, чтобы определять изменения давления, акселерометра только для блокировки ошибочные решения.

Copyright © Balancer 1997..2024
Создано 29.05.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 29.05.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
