 romix
romix

 инфо
инфо инструменты
инструменты

 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
/Hill.jpg)
Снимки сделанные с АМС вставляли в студийные фотографии
Теги:

Y.K.> На заднем плане - одни и те же горки. Снятые с разных точек, как легко видеть:
Y.K.>

Очень интересный мультик!
И круговая панорама - его часть.
А такие панорамы точно не умел тогда передавать например сюрвейер?

Y.K.>
Очень интересный мультик!
И круговая панорама - его часть.
А такие панорамы точно не умел тогда передавать например сюрвейер?
Surveyor 7 - Wikipedia, the free encyclopedia
Surveyor 7 was the seventh and last lunar lander of the American unmanned Surveyor program sent to explore the surface of the Moon. A total of 21,091 pictures were transmitted to Earth. Surveyor 7 was the fifth and final spacecraft of the Surveyor series to achieve a lunar soft landing. The objectives for this mission were to perform a lunar soft landing (in an area well removed from the maria to provide a type of terrain photography and lunar sample significantly different from those of other Surveyor missions); obtain postlanding TV pictures; determine the relative abundances of chemical elements; manipulate the lunar material; obtain touchdown dynamics data; and obtain thermal and radar reflectivity data. // Дальше — en.wikipedia.orgЭто сообщение редактировалось 24.08.2007 в 17:53
Если на лунном автомобиле была камера, и она умела передавать изображение на землю, то нельзя исключать и некий самодвижущийся аппарат типа Лунохода. Брежнев же осилил изготовление Лунохода (даже двух), почему бы его не осилить и НАСА. Да и кстати лунный автомобиль (без пассажиров) вполне бы мог наверное сыграть его роль...
Там же электронное управление, и онлайновая связь с Землей, не так ли... И камера могла вращаться не хуже чем у Брежнева... Будущие исследователи Луны в этом случае найдут разлетевшуюся на куски платформу, и целый лунный автомобиль.
Бредовый конечно вариант, но заметим - там где есть лунный автомобиль, там есть и красивый гористый пейзаж... Автомобиль точно не мог бы там ездить автономно, и все снимать?
Тогда пейзаж будет правильным, и вроде бы технически это несложно (по сравнению с Брежневским луноходом не так много дополнительных усилий), и артефакты (материальные свидетельства) все будут на месте.
Там же электронное управление, и онлайновая связь с Землей, не так ли... И камера могла вращаться не хуже чем у Брежнева... Будущие исследователи Луны в этом случае найдут разлетевшуюся на куски платформу, и целый лунный автомобиль.

Бредовый конечно вариант, но заметим - там где есть лунный автомобиль, там есть и красивый гористый пейзаж... Автомобиль точно не мог бы там ездить автономно, и все снимать?
Тогда пейзаж будет правильным, и вроде бы технически это несложно (по сравнению с Брежневским луноходом не так много дополнительных усилий), и артефакты (материальные свидетельства) все будут на месте.
The Lunar Roving Vehicle had a weight of 463 lbs (210kg).
Не так уж и много
Масса «Лунохода-1» — 756 кг.
масса «Лунохода-2» составляла 836 кг.
Кстати платформа тоже могла иметь камеру (разлетевшаяся на куски камера по легенде вроде бы полагается).
Не так уж и много
Масса «Лунохода-1» — 756 кг.
масса «Лунохода-2» составляла 836 кг.
Кстати платформа тоже могла иметь камеру (разлетевшаяся на куски камера по легенде вроде бы полагается).

Мля, ромих.
Исключать - нельзя. Но доказательств - ну никаких. Вообще.
А доказательства общепринятой версии - вот они. Дофига. Навалом. В шикарном качестве.
У меня такой вопрос к знатокам - как астронавты ориентировались при дальних перемещениях по поверхности Луны - чисто визуально?
ЛМ у них всегда был на виду, или они уезжали достаточно далеко, чтобы его не видеть?
Исключать - нельзя. Но доказательств - ну никаких. Вообще.
А доказательства общепринятой версии - вот они. Дофига. Навалом. В шикарном качестве.
У меня такой вопрос к знатокам - как астронавты ориентировались при дальних перемещениях по поверхности Луны - чисто визуально?
ЛМ у них всегда был на виду, или они уезжали достаточно далеко, чтобы его не видеть?
Человек без мечты - как птица без крыльев.
Главный по глупым вопросам.
Хм и кадры посадки (вид из окна) будут правильные...
И кадры поездки автомобиля по Луне тоже будут правильные.
Недостает только астронавтов (и их следов), но их по-моему и на земле неплохо снимали...
А за десятки лет пыль может следы на Луне по легенде и присыпать (там же электростатические бури, если я не ошибаюсь, пыль гоняют).
И кадры поездки автомобиля по Луне тоже будут правильные.
Недостает только астронавтов (и их следов), но их по-моему и на земле неплохо снимали...
А за десятки лет пыль может следы на Луне по легенде и присыпать (там же электростатические бури, если я не ошибаюсь, пыль гоняют).
Ой блин!
Нашивка с изображением эмблемы NASA со скафандра астронавта, гулявшего по Луне, продана на аукционе за 310 с половиной тысяч долларов, сообщило ...
Ирвин срезал ее со скафандра, потому что сам скафандр с остальным оборудованием остался на Луне.
Так там могли и куклы астронавтов ездить. Скафандр остается, и взрывается при старте (клочки только разве что останутся). Сложность вот только с установкой куклы на местности...
Кстати в то время не было ли шагающих роботов")
Например таких:
// student.km.ru
В 1969 году Иширо Като (Япония) показал миру антропоморфный двуногий механизм WAP-1. Интересным в данной разработке было то, что мышцы сделаны из резины или каучука и устройство приводилось в движение с помощью пневматики за счет воздействия на "искусственные мускулы". Это очень новаторская идея, которая совмещает в себе и простоту, и гениальность. Иширо Като работал при поддержке специальной исследовательской лаборатории гуманоидов (Humanoid Research Laboratory) при Waseda University (Токио). Интересен сам факт существования таковой в конце 60-х, в то время как для Японии это были не лучшие годы. И нужно сказать, результат очевиден, поскольку за Иширо Като стоит большая часть истории современных двуногих машин.
Уже в 1970 году появилась усовершенствованная модель WAP-2. В ней были разработаны специальные управляемые приводы, при этом под подошвы робота встраивались специальные датчики давления, что позволяло осуществить автоматический контроль положения.
В 1971 году состоялось сразу две премьеры, а именно - WAP-3 и WL-1. Обе они равноценны по значимости в истории шагающих механизмов. WAP-3 - это продолжение модели WAP-2, но, в отличие от предшественника, он имел спереди центр тяжести, что позволяло наклоняться и перемещаться не только по ровной поверхности, но и спускаться/подниматься, например, по лестнице. Таким образом, это был первый в мире робот, способный перемещаться не только по горизонтальной плоскости. WL-1 - это модель, управляемая мини-компьютером. Она так же, как и WAP-3, имела центр тяжести, расположенный спереди, но при этом могла менять направления ходьбы, что стало возможным за счет внедрения мини-компьютера.
Нашивка с изображением эмблемы NASA со скафандра астронавта, гулявшего по Луне, продана на аукционе за 310 с половиной тысяч долларов, сообщило ...
Ирвин срезал ее со скафандра, потому что сам скафандр с остальным оборудованием остался на Луне.
Так там могли и куклы астронавтов ездить. Скафандр остается, и взрывается при старте (клочки только разве что останутся). Сложность вот только с установкой куклы на местности...
Кстати в то время не было ли шагающих роботов
Например таких:
KM.RU Реферат: Шагающие роботы
наука и техника. Композиционная концепция и биологический подход в построении роботов. Исследование кинематики биологических механизмов. Пример шагающего аппарата. История создания «многоногих» роботов. Назначение шагающих роботов, роботы-андроиды.// student.km.ru
В 1969 году Иширо Като (Япония) показал миру антропоморфный двуногий механизм WAP-1. Интересным в данной разработке было то, что мышцы сделаны из резины или каучука и устройство приводилось в движение с помощью пневматики за счет воздействия на "искусственные мускулы". Это очень новаторская идея, которая совмещает в себе и простоту, и гениальность. Иширо Като работал при поддержке специальной исследовательской лаборатории гуманоидов (Humanoid Research Laboratory) при Waseda University (Токио). Интересен сам факт существования таковой в конце 60-х, в то время как для Японии это были не лучшие годы. И нужно сказать, результат очевиден, поскольку за Иширо Като стоит большая часть истории современных двуногих машин.
Уже в 1970 году появилась усовершенствованная модель WAP-2. В ней были разработаны специальные управляемые приводы, при этом под подошвы робота встраивались специальные датчики давления, что позволяло осуществить автоматический контроль положения.
В 1971 году состоялось сразу две премьеры, а именно - WAP-3 и WL-1. Обе они равноценны по значимости в истории шагающих механизмов. WAP-3 - это продолжение модели WAP-2, но, в отличие от предшественника, он имел спереди центр тяжести, что позволяло наклоняться и перемещаться не только по ровной поверхности, но и спускаться/подниматься, например, по лестнице. Таким образом, это был первый в мире робот, способный перемещаться не только по горизонтальной плоскости. WL-1 - это модель, управляемая мини-компьютером. Она так же, как и WAP-3, имела центр тяжести, расположенный спереди, но при этом могла менять направления ходьбы, что стало возможным за счет внедрения мини-компьютера.

1973 - WABOT-1 (Waseda University, Tokyo, Japan)
Wabot-1 was the first full-scale anthropomorphic robot built in the world. It consisted of a limb control system, a vision system, and a conversation system. The Wabot-1 was able to communicate with a person in Japanese and to measure distances and directions to the objects using external receptors, artificial ears and eyes, and an artificial mouth. The Wabot-1 walked with his lower limbs and was able to grip and transport objects with hands that used tactile sensors.

romix> Ой блин!
>Нашивка с изображением эмблемы NASA со скафандра астронавта, гулявшего по Луне, продана на аукционе за 310 с половиной тысяч долларов, сообщило ...
romix> Ирвин срезал ее со скафандра, потому что сам скафандр с остальным оборудованием остался на Луне.
Ромик, откуда ты такой бред берешь и сюда тащишь?
Скафандры на Луне не оставались. В конце концов, не голые же они назад летели
>Нашивка с изображением эмблемы NASA со скафандра астронавта, гулявшего по Луне, продана на аукционе за 310 с половиной тысяч долларов, сообщило ...
romix> Ирвин срезал ее со скафандра, потому что сам скафандр с остальным оборудованием остался на Луне.
Ромик, откуда ты такой бред берешь и сюда тащишь?
Скафандры на Луне не оставались. В конце концов, не голые же они назад летели
A Lannister always pays his debts.
Y.K.>> На заднем плане - одни и те же горки. Снятые с разных точек, как легко видеть:
Y.K.>>
romix> http://www.skeptik.net/conspir/moon_pic/hills12.gif
romix> Очень интересный мультик!
romix> И круговая панорама - его часть.
romix> http://www.hq.nasa.gov/alsj/a15/a15pan1650509.jpg
romix> А такие панорамы точно не умел тогда передавать например сюрвейер?
Качество не то, и ездить с места на место он не умел. Ибо подобных панорам - десяток, наверно, снятых в разных местах.
См. NASA Sites Unavailable
Y.K.>>
romix> http://www.skeptik.net/conspir/moon_pic/hills12.gif
romix> Очень интересный мультик!
romix> И круговая панорама - его часть.
romix> http://www.hq.nasa.gov/alsj/a15/a15pan1650509.jpg
romix> А такие панорамы точно не умел тогда передавать например сюрвейер?
Качество не то, и ездить с места на место он не умел. Ибо подобных панорам - десяток, наверно, снятых в разных местах.
См. NASA Sites Unavailable
A Lannister always pays his debts.
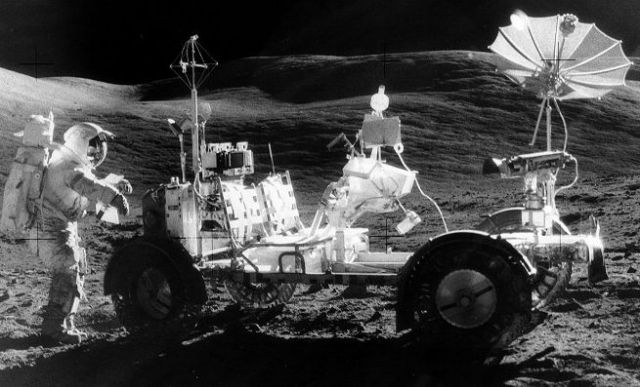
_B1_> ЛМ у них всегда был на виду, или они уезжали достаточно далеко, чтобы его не видеть?
Уезжали достаточно далеко. До потери визуальной видимости ЛМ.
_B1_> У меня такой вопрос к знатокам - как астронавты ориентировались при дальних перемещениях по поверхности Луны - чисто визуально?
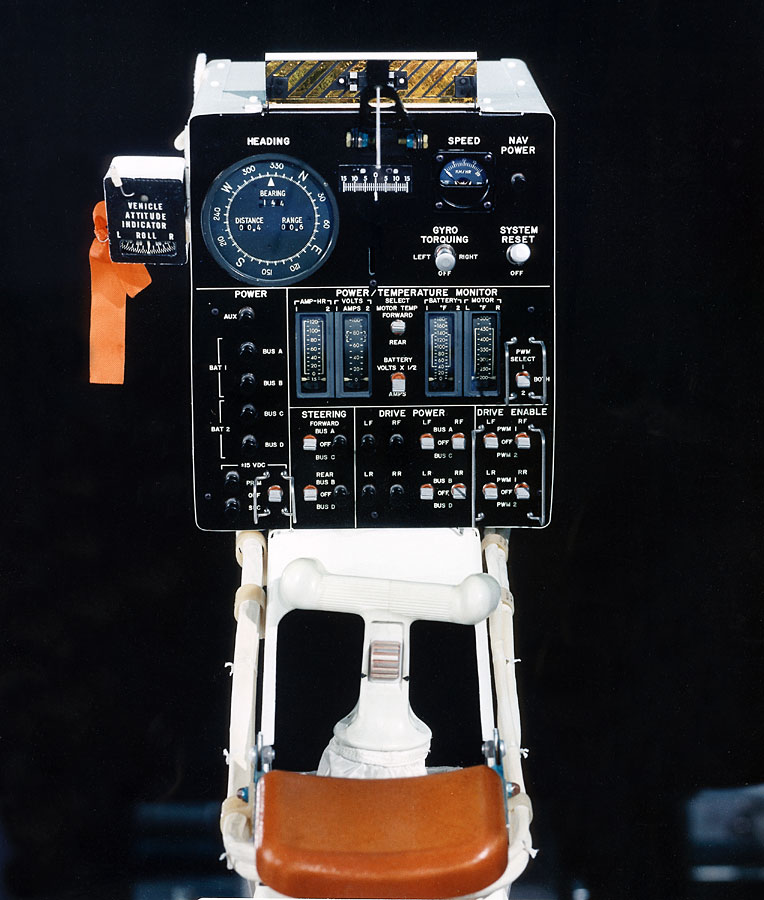
Ровер был оборудован автономной навигационной системой.
См картинку панели управления.
Большой круглый индикатор слева указывает текущий курс (шкала по кругу), азимут исходной точки маршрута (цифры на счётчике под надписью BEARING), текущее расстояние до неё (цифры на счётчике под надписью RANGE), пройденный путь (цифры на счётчике под надписью DISTANCE)
Исходная точка маршрута обычно располагалась вблизи ЛМ. На исходной точке производилась начальная установка системы и далее она вела счисление текущих координат самостоятельно.
подробности должны быть здесь:
http://www.hq.nasa.gov/office/pao/History/alsj/19790072520_1979072520.pdf (~14.5 Мб)
"THE NAVIGATION SYSTEM OF THE LUNAR ROVING VEHICLE. TECHNICAL MEMORANDUM"
Уезжали достаточно далеко. До потери визуальной видимости ЛМ.
_B1_> У меня такой вопрос к знатокам - как астронавты ориентировались при дальних перемещениях по поверхности Луны - чисто визуально?
Ровер был оборудован автономной навигационной системой.
См картинку панели управления.
Большой круглый индикатор слева указывает текущий курс (шкала по кругу), азимут исходной точки маршрута (цифры на счётчике под надписью BEARING), текущее расстояние до неё (цифры на счётчике под надписью RANGE), пройденный путь (цифры на счётчике под надписью DISTANCE)
Исходная точка маршрута обычно располагалась вблизи ЛМ. На исходной точке производилась начальная установка системы и далее она вела счисление текущих координат самостоятельно.
подробности должны быть здесь:
http://www.hq.nasa.gov/office/pao/History/alsj/19790072520_1979072520.pdf (~14.5 Мб)
"THE NAVIGATION SYSTEM OF THE LUNAR ROVING VEHICLE. TECHNICAL MEMORANDUM"
Реклама Google — средство выживания форумов :)
Большое спасибо за ответ
Человек без мечты - как птица без крыльев.
Главный по глупым вопросам.
Copyright © Balancer 1997..2018
Создано 25.01.2007
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 25.01.2007
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}