/hqdefault.jpg)
 Sheradenin
Sheradenin
 инфо
инфо инструменты
инструменты Памятливый45
Памятливый45
 Дядюшка ВB.
Дядюшка ВB.
 Wyvern-2
Wyvern-2


 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
/hqdefault.jpg)
В 20 веке ракеты не только садиться на неподготовленную поверхность не могли , но и взлететь с неё?
Тема зеркальная теме про вторую попытку США создать ракеты, способные и взлетать и садитьсяТеги:

Sheradenin>>>> Или вот так - расскажите в чем разница между ... в чем измеряется разница между ЖРД и ТРД... А кроме тяги какие там есть еще параметры - ну ка быстро перечислите!
Памятливый45> Ваши личные вопросы относительно знаний участника форума желательно задавать в разделе, посвященном конкретному участнику форума. например
Памятливый45> Памятливый45 [Памятливый45#11.07.09 13:37]
Памятливый45> В настоящем разделе все дружно, строем и хором отвечают про ракету, взлетавшую в 20-м веке с неподготовленной поверхности.
А что правда что вы такой тупой, что сначала сами пишете что не надо приводить примеров ракет с ТРД по причине того то это не ракета - а теперь пишете что вы не будуте обсуждаь почему именно это не ракета и вчем отличие ЖРД от ТРД?
Памятливый45> Ваши личные вопросы относительно знаний участника форума желательно задавать в разделе, посвященном конкретному участнику форума. например
Памятливый45> Памятливый45 [Памятливый45#11.07.09 13:37]
Памятливый45> В настоящем разделе все дружно, строем и хором отвечают про ракету, взлетавшую в 20-м веке с неподготовленной поверхности.
А что правда что вы такой тупой, что сначала сами пишете что не надо приводить примеров ракет с ТРД по причине того то это не ракета - а теперь пишете что вы не будуте обсуждаь почему именно это не ракета и вчем отличие ЖРД от ТРД?
Freedom is the right to tell people what they do not want to hear. George Orwell


Sheradenin> А что правда что вы ...
Уважаемый участник форума Шераденин так расстроился отсутствием ракет в 20-м веке, способных взлетать с неподготовленной поверхности , что принялся оскорбять участника форума, задавшего простой и бесхитростный вопрос.
Шераденин хочет сдетать простую двухходовку.
1.Оперируя примерами боевых снарядов, оснащенных как ракетными реактивными двигателями, так турбореактивными двигателями , он хочет, чтобы Памятливый45 признал, всё, что оснащено реактивным двигателем, ракетой.
2.А затем, ему останется просто впарить мне в качестве ракеты "Турбулёт".
Не получается это у него. Вот и скандалит.
Но, чтобы ему не было обидно я проинформирую его и ему подобным, что есть ещё один тип летательных аппаратов, которые оснащены ракетными двигателями, которые могут взлетать с неподготовленных поврхностей (и садиться на такие поверхности), но которые также не могут быть восприняты как ракеты.
Хотелось бы, чтобы Sheradenin первым назвал, что это за гуси такие.
Уважаемый участник форума Шераденин так расстроился отсутствием ракет в 20-м веке, способных взлетать с неподготовленной поверхности , что принялся оскорбять участника форума, задавшего простой и бесхитростный вопрос.
Шераденин хочет сдетать простую двухходовку.
1.Оперируя примерами боевых снарядов, оснащенных как ракетными реактивными двигателями, так турбореактивными двигателями , он хочет, чтобы Памятливый45 признал, всё, что оснащено реактивным двигателем, ракетой.
2.А затем, ему останется просто впарить мне в качестве ракеты "Турбулёт".
Не получается это у него. Вот и скандалит.
Но, чтобы ему не было обидно я проинформирую его и ему подобным, что есть ещё один тип летательных аппаратов, которые оснащены ракетными двигателями, которые могут взлетать с неподготовленных поврхностей (и садиться на такие поверхности), но которые также не могут быть восприняты как ракеты.
Хотелось бы, чтобы Sheradenin первым назвал, что это за гуси такие.


Памятливый45> что принялся оскорбять участника форума,
Это вам показалось. На самом деле он просто констатировал медицинский факт, что участник форума тупой
Памятливый45> задавшего простой и бесхитростный вопрос.
Очень тупой вопрос...
Это вам показалось. На самом деле он просто констатировал медицинский факт, что участник форума тупой
Памятливый45> задавшего простой и бесхитростный вопрос.
Очень тупой вопрос...
Две вещи действительно бесконечны: Вселенная и человеческая глупость. Впрочем, насчет Вселенной у меня есть некоторые сомнения (c) А.Эйнштейн

Памятливый45> вы находитесь в Интернете, на Форуме Авиабаза, в разделе, посвящённом вопросу о том, была ли 20-м веке ракета, взлетающая с неподготовленной поверхности.
Напоминаю вам, что мы находимся в разделе "Американцы на Луне - были или нет?" в теме посвящённой вопросу "В 20 веке ракеты не только садиться на неподготовленную поверхность не могли, но и взлететь с неё?". А это означает, что мы тут рассматриваем вопросы не только взлёта, но и посадки в применении к посадке лунного модуля (ЛМ) Аполлона. И в связи с этим возникают следующие вопросы:
1. Что означает термин "неподготовленная поверхность"?
2. Какая связь между неподготовленной поверхностью и технологией вертикального взлёта ракеты?
3. Можно ли перенести опыт, полученный при испытании турболёта, на аппарат с ракетным двигателем? Есть ли разница в технологии взлёта/посадки у этих двух аппаратов?
4. Каким образом неподготовленность поверхности может помешать посадке?
5. Можно ли взлетев на турболёте или ракетолёте с подготовленной бетонной площадки совершить на нём мягкую посадку на неподготовленную поверхность?
Теперь возьмёмся за ответы.
1. Судя по названию раздела, неподготовленной поверхностью мы можем считать поверхность аналогичную той, которая находится в местах посадок Аполлонов на Луне. А что мы имеем на месте посадок? Мы имеем относительно ровную поверхность достаточно плотного лунного грунта (реголита) с неглубоким более рыхлым верхним слоем, на которой кое-где находятся кратеры от падений метеоритов различного диаметра и глубины и камни различного размера и формы.
2. Рассмотрим технологию вертикального взлёта. Что нам нужно, чтобы аппарат взлетел? Нам нужно, чтобы аппарат обладал двигателем создающим достаточное тяговое усилие, по вектору совпадающее с вертикальной осью аппарата. Что нам ещё нужно? Нам нужно, чтобы аппарат не опрокинулся во время взлёта, а для этого нам нужно устройство для стабилизации его вертикального положения в полёте. В качестве такого устройства можно использовать систему ориентации (СО), которая состоит из специальных датчиков отклонения от вертикали, набора небольших ракетных двигателей (ДСО), а также анализирующего и управляющего устройства, которое на основе информации с датчиков может выдавать сигналы на включение и выключение определённых ДСО для необходимой стабилизации.
Теперь посмотрим, каким образом тут участвует неподготовленная поверхность. Для взлёта имеет значение только угол отклонения аппарата от вертикали. Необходимо только, чтобы этот угол не превышал предельно допустимую величину. Неровность самой поверхности на вектор тяги не оказывает никакого влияния, если только аппарат не прижимается соплом вплотную к опорной поверхности. Если же аппарат стоит на специальных опорах, и между соплом и этой поверхностью существует достаточный зазор, то неровность и рыхлость поверхности значения не имеют. Это логически вытекает из того факта, что тяговое усилие создаётся в результате расширения сильно нагретого газа, струя которого истекает из сопла двигателя с большой скоростью, сообщая двигателю импульс в направлении противоположном истечению. При этом молекулы газа, сообщив импульс двигателю, улетают из сопла, как пули из ружья, и уже не оказывают воздействия на двигатель и вектор его тяги. При этом отражения струи от поверхности обратно вверх не происходит, о чём говорят результаты многочисленных экспериментов. Описание одного из них я приведу чуть ниже. Из всего вышесказанного можно сделать вывод, что на технологию взлёта с неподготовленной поверхности сама поверхность практически никакого влияния не оказывает, т.е. взлёт происходит одинаково в независимости от степени неровности и рыхлости поверхности, более того, это происходит так, как будто поверхности нет вообще.
3. Теперь посмотрим, чем отличается турболёт от ракетолёта. Отличаются они только двигателем. У турболёта двигатель турбореактивный, а у ракетолёта - ракетный. Есть ли между ними разница в технологии взлёта/посадки? Да никакой разницы нет - и там, и там используется реактивный принцип движения. Рабочее тело в камере сгорания нагревается за счёт идущей в нём реакции окисления топлива. Рабочее тело (газ) расширяется в результате сильного нагревания, и струя раскалённого газа с высокой скоростью истекает из сопла двигателя, придавая импульс двигателю по закону сохранения импульса. Так в чём же разница? А разница только в том, что в ракетном двигателе окислитель находится на борту аппарата, а в ТРД окислитель (кислород) берётся из атмосферного воздуха. Только эта разница никак не влияет на технологию взлёта/полёта/посадки, поведение аппаратов с ТРД и с РД будет схожим, и управление ими будет одинаковым. Таким образом мы с уверенностью можем сказать, что опыт, приобретённый при испытаниях турболёта, мы можем использовать при конструировании ракетолёта, а навыки пилота турболёта можно использовать при управлении ракетолётом.
4. Теперь рассмотрим помехи для посадки, создаваемые неподготовленностью лунной поверхности. При посадке верхний более рыхлый слой реголита раздувается реактивной струёй - образуется большое количество пыли, которая сильно ограничивает видимость в зоне посадки. Но Лунный модуль снабжён радаром и другими специальными приборами, определяющими вертикальную и горизонтальную скорость посадки, а также высоту над поверхностью. К тому же есть устройство автоматического отключения двигателя в момент касания поверхности. Таким образом пилот может сажать модуль практически вслепую, используя только показания приборов. Для посадок Аполлонов заранее выбирались площадки с "морским" типом рельефа, т.е, относительно ровные почти горизонтальные поверхности с небольшим количеством кратеров. Как мы выяснили выше, неровность поверхности не оказывает влияния на вектор тяги двигателя аппарата, а это означает, что остаётся только риск опрокидывания аппарата, если при посадке опоры попадут на крупный камень или на крутой склон какого-либо кратера. Для этого, несмотря на наличие специального режима полностью автоматической посадки, реализуемого в виде подпрограммы в бортовом компьютере, пилоты лунных модулей обычно пользовались полуавтоматическим режимом, и сами выбирали место для посадки. Опоры у ЛМ были регулируемые по высоте, это значит, что ЛМ прочно вставал на относительно неровную в определённых пределах поверхность всеми четырьмя опорами.
5. Исходя из всего вышесказанного мы можем ответить и на пятый вопрос. Да, взлетев с бетонированной площадки турболёт или ракетолёт мог приземлиться на неподготовленную поверхность типа той, которая была на Луне в местах посадки Аполлонов. Он мог приземлиться и на относительно неровную в определённых пределах, конечно, грунтовую площадку, и на песчанный пляж, и на травку, и на поверхность с небольшими камнями и кратерами. А это означает, что для отработки технологии посадки на неподготовленную поверхность вовсе необязательно взлетать с такой поверхности, тем более, что задача такая не ставилась - ЛМ должен был только сесть, а взлетала уже вторая ступень, первая оставалась на поверхности Луны.
И наконец, мы можем сказать, что всё выше сказанное имеет прямое отношение к заявленной теме, ибо показывает, что для отработки технологии мягкой вертикальной посадки аппарата с ракетным двигателем на неподготовленную поверхность, вовсе не обязательно иметь прототип умеющий взлетать с неё, а достаточно отработать отдельные моменты причём на разных аппаратах, например, так, как это было сделано в программе "Аполлон". Как? Смотри ниже.
Памятливый45> Вопрос задал Памятливый69 - ортодокс, не верящий, что без испытания можно запускать людей в полёт
А испытания были. Только не такие, как их себе представляет Памятливый45. Как я только что сказал, достаточно было отработать отдельные моменты, разбив испытания на три этапа. Взлёт/полёт/посадку отработать на специальном турболёте LLRV, в качестве поверхности для взлёта/посадки используя бетонную площадку. Посадку на поверхность Луны отработать на беспилотных аппаратах Surveyor. А собственно LM испытать три раза во время полётов Аполлонов -5, -9 и -10, только имитируя реальную посадку. Первый раз в беспилотном режиме, а остальные в пилотируемом. Кроме этого было проведено большое количество различных испытаний отдельных элементов конструкции на Земле на специальных стендах, включая испытания в вакуумных установках, где ЛМ помещался целиком. Пилоты же тренировались на LLRV/LLTV, налетав на них десятки часов, а также на специальных тренажёрах, имитирующих кабину лунного модуля и различные режимы посадки.
Памятливый45> Максимально близко Вы подошли к запрошенной мною ракете, распространяя пропаганду НАСА о том, что Сюрвейер6 смог взлететь на высоту 3 метров на Луне.
Учите матчасть, Памятливый45.
"17 ноября проведен эксперимент по перемещению аппарата над лунной поверхностью.
В 10 час. 32 мин. по команде с Земли были включены ЖРД, которые проработали 2,5 сек при общей тяге 68 кГ. Аппарат оторвался от лунной поверхности, поднялся на высоту 3 м и опустился на расстоянии 2,4 м от места первоначальной посадки. В полете аппарат находился 8,5 сек. В 11 час. 07 мин. снова началась передача телевизионных изображений. Эксперимент по перемещению аппарата предназначался (30, 38) для исследования проблем посадки и старта с Луны, в частности, воздействия истекающей струи на лунный грунт, получения телевизионных изображений следов, оставленных на грунте посадочными опорами аппарата в месте первоначальной посадки, и стереоскопических изображений элементов поверхности (производится съемка одних и тех же элементов поверхности под разными углами). Съемка с двух точек позволяет повысить точность определения расстояния между элементами рельефа поверхности, попавшим в кадр. Часть этих задач увязана с изучением проблемы посадки и старта с Луны лунной кабины корабля Apollo. Эксперимент по перемещению аппарата прошел успешно."
"Специалисты NASA рассматривали вопрос о возможности перемещения 24 ноября аппарата на расстояние до 300 м на склон близлежащего кратера. Этот эксперимент предназначался для решения задач по исследованию проблем посадки и старта с Луны, испытанию радиолокационного оборудования, обеспечивающего мягкую посадку и получению крупноплановых изображений больших камней, находящихся на склоне указанного кратера. Расчеты показали, что запас топлива недостаточен для проведения такого эксперимента. Отказ от его проведения был мотивирован руководителями программы тем, что остаток топлива мог обеспечить перемещение аппарата на небольшое расстояние, в пределах которого не было достаточно интересных элементов рельефа (на расстоянии до 300 м не наблюдалось топографических условий, сколько-нибудь отличающихся от места посадки)..."
Как мы видим, аппарат был способен на перелёт до 300 м от места посадки.
Опаньки69>> Реактивный двигатель сочетает в себе собственно двигатель с движителем, то есть он создаёт тяговое усилие только за счёт взаимодействия с рабочим телом, без опоры или контакта с другими телами.
Памятливый45> Ну здесь сразу вас надо остановить как заговорившегося в неправильною сторону (ТРД имеет контакт воздухозаборником примерно в 30% тяги).
И что? Этот контакт не используется напрямую для создания тягового усилия.
"В турбореактивном двигателе (ТРД, англоязычный термин — turbojet engine) сжатие рабочего тела на входе в камеру сгорания и высокое значение расхода воздуха через двигатель достигается за счёт совместного действия встречного потока воздуха и компрессора, размещённого в тракте ТРД сразу после входного устройства, перед камерой сгорания. Компрессор приводится в движение турбиной, смонтированной на одном валу с ним, и работающей на том же рабочем теле, нагретом в камере сгорания, из которого образуется реактивная струя. Во входном устройстве осуществляется рост статического давления воздуха за счёт торможения воздушного потока. В компрессоре осуществляется рост полного давления воздуха за счёт совершаемой компрессором механической работы."
То есть турбина компрессора не создаёт тяговое усилие двигателя, а, наоборот, берёт часть энергии реактивной струи для своей работы.
Памятливый45> Опаньки69 под Ваше определение реактивного двигателя -движителя подпадаут и вертолётные установки.
Не подпадут. Вертолётный двигатель не использует для создания тягового усилия струю раскалённых газов, получающуюся в результате теплового расширения рабочего тела и придающую по закону сохранения импульса двигателю импульс обратный по направлению импульсу реактивной струи.
Опаньки69>> ... Легко видеть, что качество поверхности, с которой вертикально взлетает или на которую совершает вертикальную мягкую посадку аппарат с реактивным двигателем, никак не влияет ни на тягу двигателя, ни на направление вектора этой тяги.
Памятливый45> Опаньки69 ! Смею развеять Вашу недограмотность, но кроме тяги ракета нуждается и некоторых других технических параметах , например в устойчивости и управляемости.
Устойчивость и управляемость при взлёте турболётов и ракетолётов типа LLRV, Surveyor и LM осуществлялась помощью системы ориентации (СО), состоящей из датчиков, анализирующего и управляющего устройства и специальных небольших ракетных двигателей (ДСО). Причём на LLRV и LM в качестве анализирующего и управляющего устройства использовалась бортовая ЭВМ.
Опаньки69>> На LLRV отрабатывались общие принципы полёта, вертикального взлёта и посадки для подобных аппаратов (LM, Surveyor), а вопросы подготовленности поверхности для отработки этих принципов значения не имели.
Памятливый45> Опаньки69 -Вы немного врете.
Памятливый45> "Чтобы изучить проблемы устойчивости и управляемости реактивных вертикально взлетающих самолётов, строят специальные летающие стенды, которые внешне мало напоминают летательный аппарат. У нас в стране проходит испытание летающий стенд "Турбулет", построенный под руководством А.Н.Рафаэльянца и В.Н.Матвеева"("Безаэродромная авиация" Е.И.Ружицкий, Москва 1959 г.)
А вот здесь я приведу описание обещанного выше эксперимента.
"Научным руководителем этих работ являлся В.Н. Матвеев, ведущим инженером А.И. Квашнин, главным конструктором турболета А.Н. Рафаэлянц, инженером-конструктором Г.Н. Лапшин, инженером по эксплуатации Г.И. Кобец, ведущим летчиком-испытателем Ю.А. Гарнаев. Облетывал аппарат в 1957 г. летчик-испытатель Г.Н. Захаров.
На турболете было решено установить двигатель РД-9БП в вертикальном положении. Для исследования работы двигателя в такой нестандартной ситуации построили под руководством О. Константинова специальный стенд, где весной 1955 г. группа инженера С. Щербакова приступила к проведению ряда последовательных экспериментов. По воспоминаниям их участника, инженера О.А.Богомягкова, стенд представлял собой четырехгранную пирамиду, смонтированную в виде фермы из профильных стальных балок на бетонном основании. В центре закреплялся двигатель, в нижней части конструкции устанавливались температурные датчики и термосвидетели.
На первом этапе использовался двигатель РД-45Ф с центробежным компрессором, установленный на истребителе МиГ-15.
На втором этапе ТРД находился в вертикальном положении. Управление двигателем осуществлялось РУДом через длинный трос или гидропривод. Для питания использолась не штатная бортовая топливная система, а установленный на безопасное расстояние топливный бак.
На заключительном этапе, летом 1956 г., исследовалс вертикальном положении двигатель РД-9БП с осевым компрессором, предназначенный для турболета. Чтобы облегчить ТРД, вместо форсажной камеры с соответствующей топливной аппаратурой установили нерегулируемое реактивное сопло.
Результаты экспериментов показали работоспособность ТРД в необычной позиции. Оказалось, что выхлопная газовая струя растекается равномерно во все стороны тонкой веерообразной пеленой над ВПП от места ее удара, не поднимаясь вверх. Таким образом, двигатель работает в благоприятных для старта условиях.
Серьезной проблемой оставалось недостаточные устойчивость и управляемость турболета. Малейшая допущенная пилотом неточность - и аппарат мог опрокинуться.
Весьма опасался этого Ю.А. Гарнаев, которому поручили испытывать «летающий стенд». Полеты выполнялись на незначительной высоте, поэтому о применении парашюта не могло быть и речи.
Турболет не имел ни фюзеляжа, ни крыльев, ни винта. Вся конструкция -сварная ферма, посередине которой находился двигатель и кабина пилота. Его устойчивость в воздухе обеспечивали газовые и струйные рули, управлять которыми оказалось не так-то просто. По воспоминаниям Богомягкова, в ЛИИ придумали специальные приспособление регулирования тяги."
http://vtol.boom.ru//limg.imgsmail.ru/r/speeddial.png [not image]
// vtol.boom.ru
Как мы видим проблемы для устойчивости и управляемости создавала вовсе не поверхность стартовой площадки, а сама конструкция аппарата, где средняя точка приложения тягового усилия находилась ниже центра масс аппарата, и таким образом конструкция получалась неустойчивой, как карандаш поставленный на остриё. Проблема эта была одинаково острой как вблизи поверхности, так и на достаточной высоте. К тому же советские инженеры и конструкторы решали эти проблемы ещё в 1956 году причём без применения бортовых ЭВМ, а используя только ручные механические и пневматические приспособления, типа газовых и струйных рулей.
"Десятки раз поднимал Гарнаев в воздух этот уникальный летательный аппарат. Он вспоминал, что в основном во время испытаний выясняли, с помощью каких рулей можно лучше управлять самолетом вертикального взлета и посадки. Имеются, как упомянуто выше, два вида рулей: газовые и струйные. Первые размещаются в струе газов, выходящих за двигателем, поэтому тесно связаны с режимом его работы и тягой. Вторые работают при помощи сжатого воздуха, который подается из компрессора реактивного двигателя. Оказалось, что сочетание этих двух типов рулей обеспечивает управляемость вертикально взлетающих аппаратов, а также дает возможность летать в любом направлении."
ДСО LLRV и LM по принципу управления аналогичны газовым рулям советского турболёта.
Памятливый45> ЛМ садился по тому же принципу, что и Сюрвейер (с попадающей орбиты).
Что вы имеете ввиду под термином "попадающая орбита"? Если траекторию, по которой аппарат от Земли попадал на поверхность Луны, то тут вы ошибаетесь. Аполлон сперва выходил на окололунную (селеноцентрическую, как тогда говорили) орбиту. Затем лунный модуль отстыковывался от основного командно-служебного модуля и начинал торможение, переходя на посадочную траекторию. Причём торможение и посадка проходили в три этапа, которые достаточно хорошо описаны у Шунейко, и на каждом этапе использовались несколько программ для бортовой ЭВМ по выбору пилота - автоматический, полуавтоматический и полностью ручной режимы.
Напоминаю вам, что мы находимся в разделе "Американцы на Луне - были или нет?" в теме посвящённой вопросу "В 20 веке ракеты не только садиться на неподготовленную поверхность не могли, но и взлететь с неё?". А это означает, что мы тут рассматриваем вопросы не только взлёта, но и посадки в применении к посадке лунного модуля (ЛМ) Аполлона. И в связи с этим возникают следующие вопросы:
1. Что означает термин "неподготовленная поверхность"?
2. Какая связь между неподготовленной поверхностью и технологией вертикального взлёта ракеты?
3. Можно ли перенести опыт, полученный при испытании турболёта, на аппарат с ракетным двигателем? Есть ли разница в технологии взлёта/посадки у этих двух аппаратов?
4. Каким образом неподготовленность поверхности может помешать посадке?
5. Можно ли взлетев на турболёте или ракетолёте с подготовленной бетонной площадки совершить на нём мягкую посадку на неподготовленную поверхность?
Теперь возьмёмся за ответы.
1. Судя по названию раздела, неподготовленной поверхностью мы можем считать поверхность аналогичную той, которая находится в местах посадок Аполлонов на Луне. А что мы имеем на месте посадок? Мы имеем относительно ровную поверхность достаточно плотного лунного грунта (реголита) с неглубоким более рыхлым верхним слоем, на которой кое-где находятся кратеры от падений метеоритов различного диаметра и глубины и камни различного размера и формы.
2. Рассмотрим технологию вертикального взлёта. Что нам нужно, чтобы аппарат взлетел? Нам нужно, чтобы аппарат обладал двигателем создающим достаточное тяговое усилие, по вектору совпадающее с вертикальной осью аппарата. Что нам ещё нужно? Нам нужно, чтобы аппарат не опрокинулся во время взлёта, а для этого нам нужно устройство для стабилизации его вертикального положения в полёте. В качестве такого устройства можно использовать систему ориентации (СО), которая состоит из специальных датчиков отклонения от вертикали, набора небольших ракетных двигателей (ДСО), а также анализирующего и управляющего устройства, которое на основе информации с датчиков может выдавать сигналы на включение и выключение определённых ДСО для необходимой стабилизации.
Теперь посмотрим, каким образом тут участвует неподготовленная поверхность. Для взлёта имеет значение только угол отклонения аппарата от вертикали. Необходимо только, чтобы этот угол не превышал предельно допустимую величину. Неровность самой поверхности на вектор тяги не оказывает никакого влияния, если только аппарат не прижимается соплом вплотную к опорной поверхности. Если же аппарат стоит на специальных опорах, и между соплом и этой поверхностью существует достаточный зазор, то неровность и рыхлость поверхности значения не имеют. Это логически вытекает из того факта, что тяговое усилие создаётся в результате расширения сильно нагретого газа, струя которого истекает из сопла двигателя с большой скоростью, сообщая двигателю импульс в направлении противоположном истечению. При этом молекулы газа, сообщив импульс двигателю, улетают из сопла, как пули из ружья, и уже не оказывают воздействия на двигатель и вектор его тяги. При этом отражения струи от поверхности обратно вверх не происходит, о чём говорят результаты многочисленных экспериментов. Описание одного из них я приведу чуть ниже. Из всего вышесказанного можно сделать вывод, что на технологию взлёта с неподготовленной поверхности сама поверхность практически никакого влияния не оказывает, т.е. взлёт происходит одинаково в независимости от степени неровности и рыхлости поверхности, более того, это происходит так, как будто поверхности нет вообще.
3. Теперь посмотрим, чем отличается турболёт от ракетолёта. Отличаются они только двигателем. У турболёта двигатель турбореактивный, а у ракетолёта - ракетный. Есть ли между ними разница в технологии взлёта/посадки? Да никакой разницы нет - и там, и там используется реактивный принцип движения. Рабочее тело в камере сгорания нагревается за счёт идущей в нём реакции окисления топлива. Рабочее тело (газ) расширяется в результате сильного нагревания, и струя раскалённого газа с высокой скоростью истекает из сопла двигателя, придавая импульс двигателю по закону сохранения импульса. Так в чём же разница? А разница только в том, что в ракетном двигателе окислитель находится на борту аппарата, а в ТРД окислитель (кислород) берётся из атмосферного воздуха. Только эта разница никак не влияет на технологию взлёта/полёта/посадки, поведение аппаратов с ТРД и с РД будет схожим, и управление ими будет одинаковым. Таким образом мы с уверенностью можем сказать, что опыт, приобретённый при испытаниях турболёта, мы можем использовать при конструировании ракетолёта, а навыки пилота турболёта можно использовать при управлении ракетолётом.
4. Теперь рассмотрим помехи для посадки, создаваемые неподготовленностью лунной поверхности. При посадке верхний более рыхлый слой реголита раздувается реактивной струёй - образуется большое количество пыли, которая сильно ограничивает видимость в зоне посадки. Но Лунный модуль снабжён радаром и другими специальными приборами, определяющими вертикальную и горизонтальную скорость посадки, а также высоту над поверхностью. К тому же есть устройство автоматического отключения двигателя в момент касания поверхности. Таким образом пилот может сажать модуль практически вслепую, используя только показания приборов. Для посадок Аполлонов заранее выбирались площадки с "морским" типом рельефа, т.е, относительно ровные почти горизонтальные поверхности с небольшим количеством кратеров. Как мы выяснили выше, неровность поверхности не оказывает влияния на вектор тяги двигателя аппарата, а это означает, что остаётся только риск опрокидывания аппарата, если при посадке опоры попадут на крупный камень или на крутой склон какого-либо кратера. Для этого, несмотря на наличие специального режима полностью автоматической посадки, реализуемого в виде подпрограммы в бортовом компьютере, пилоты лунных модулей обычно пользовались полуавтоматическим режимом, и сами выбирали место для посадки. Опоры у ЛМ были регулируемые по высоте, это значит, что ЛМ прочно вставал на относительно неровную в определённых пределах поверхность всеми четырьмя опорами.
5. Исходя из всего вышесказанного мы можем ответить и на пятый вопрос. Да, взлетев с бетонированной площадки турболёт или ракетолёт мог приземлиться на неподготовленную поверхность типа той, которая была на Луне в местах посадки Аполлонов. Он мог приземлиться и на относительно неровную в определённых пределах, конечно, грунтовую площадку, и на песчанный пляж, и на травку, и на поверхность с небольшими камнями и кратерами. А это означает, что для отработки технологии посадки на неподготовленную поверхность вовсе необязательно взлетать с такой поверхности, тем более, что задача такая не ставилась - ЛМ должен был только сесть, а взлетала уже вторая ступень, первая оставалась на поверхности Луны.
И наконец, мы можем сказать, что всё выше сказанное имеет прямое отношение к заявленной теме, ибо показывает, что для отработки технологии мягкой вертикальной посадки аппарата с ракетным двигателем на неподготовленную поверхность, вовсе не обязательно иметь прототип умеющий взлетать с неё, а достаточно отработать отдельные моменты причём на разных аппаратах, например, так, как это было сделано в программе "Аполлон". Как? Смотри ниже.
Памятливый45> Вопрос задал Памятливый69 - ортодокс, не верящий, что без испытания можно запускать людей в полёт
А испытания были. Только не такие, как их себе представляет Памятливый45. Как я только что сказал, достаточно было отработать отдельные моменты, разбив испытания на три этапа. Взлёт/полёт/посадку отработать на специальном турболёте LLRV, в качестве поверхности для взлёта/посадки используя бетонную площадку. Посадку на поверхность Луны отработать на беспилотных аппаратах Surveyor. А собственно LM испытать три раза во время полётов Аполлонов -5, -9 и -10, только имитируя реальную посадку. Первый раз в беспилотном режиме, а остальные в пилотируемом. Кроме этого было проведено большое количество различных испытаний отдельных элементов конструкции на Земле на специальных стендах, включая испытания в вакуумных установках, где ЛМ помещался целиком. Пилоты же тренировались на LLRV/LLTV, налетав на них десятки часов, а также на специальных тренажёрах, имитирующих кабину лунного модуля и различные режимы посадки.
Памятливый45> Максимально близко Вы подошли к запрошенной мною ракете, распространяя пропаганду НАСА о том, что Сюрвейер6 смог взлететь на высоту 3 метров на Луне.
Учите матчасть, Памятливый45.
"17 ноября проведен эксперимент по перемещению аппарата над лунной поверхностью.
В 10 час. 32 мин. по команде с Земли были включены ЖРД, которые проработали 2,5 сек при общей тяге 68 кГ. Аппарат оторвался от лунной поверхности, поднялся на высоту 3 м и опустился на расстоянии 2,4 м от места первоначальной посадки. В полете аппарат находился 8,5 сек. В 11 час. 07 мин. снова началась передача телевизионных изображений. Эксперимент по перемещению аппарата предназначался (30, 38) для исследования проблем посадки и старта с Луны, в частности, воздействия истекающей струи на лунный грунт, получения телевизионных изображений следов, оставленных на грунте посадочными опорами аппарата в месте первоначальной посадки, и стереоскопических изображений элементов поверхности (производится съемка одних и тех же элементов поверхности под разными углами). Съемка с двух точек позволяет повысить точность определения расстояния между элементами рельефа поверхности, попавшим в кадр. Часть этих задач увязана с изучением проблемы посадки и старта с Луны лунной кабины корабля Apollo. Эксперимент по перемещению аппарата прошел успешно."
"Специалисты NASA рассматривали вопрос о возможности перемещения 24 ноября аппарата на расстояние до 300 м на склон близлежащего кратера. Этот эксперимент предназначался для решения задач по исследованию проблем посадки и старта с Луны, испытанию радиолокационного оборудования, обеспечивающего мягкую посадку и получению крупноплановых изображений больших камней, находящихся на склоне указанного кратера. Расчеты показали, что запас топлива недостаточен для проведения такого эксперимента. Отказ от его проведения был мотивирован руководителями программы тем, что остаток топлива мог обеспечить перемещение аппарата на небольшое расстояние, в пределах которого не было достаточно интересных элементов рельефа (на расстоянии до 300 м не наблюдалось топографических условий, сколько-нибудь отличающихся от места посадки)..."
Как мы видим, аппарат был способен на перелёт до 300 м от места посадки.
Опаньки69>> Реактивный двигатель сочетает в себе собственно двигатель с движителем, то есть он создаёт тяговое усилие только за счёт взаимодействия с рабочим телом, без опоры или контакта с другими телами.
Памятливый45> Ну здесь сразу вас надо остановить как заговорившегося в неправильною сторону (ТРД имеет контакт воздухозаборником примерно в 30% тяги).
И что? Этот контакт не используется напрямую для создания тягового усилия.
"В турбореактивном двигателе (ТРД, англоязычный термин — turbojet engine) сжатие рабочего тела на входе в камеру сгорания и высокое значение расхода воздуха через двигатель достигается за счёт совместного действия встречного потока воздуха и компрессора, размещённого в тракте ТРД сразу после входного устройства, перед камерой сгорания. Компрессор приводится в движение турбиной, смонтированной на одном валу с ним, и работающей на том же рабочем теле, нагретом в камере сгорания, из которого образуется реактивная струя. Во входном устройстве осуществляется рост статического давления воздуха за счёт торможения воздушного потока. В компрессоре осуществляется рост полного давления воздуха за счёт совершаемой компрессором механической работы."
То есть турбина компрессора не создаёт тяговое усилие двигателя, а, наоборот, берёт часть энергии реактивной струи для своей работы.
Памятливый45> Опаньки69 под Ваше определение реактивного двигателя -движителя подпадаут и вертолётные установки.
Не подпадут. Вертолётный двигатель не использует для создания тягового усилия струю раскалённых газов, получающуюся в результате теплового расширения рабочего тела и придающую по закону сохранения импульса двигателю импульс обратный по направлению импульсу реактивной струи.
Опаньки69>> ... Легко видеть, что качество поверхности, с которой вертикально взлетает или на которую совершает вертикальную мягкую посадку аппарат с реактивным двигателем, никак не влияет ни на тягу двигателя, ни на направление вектора этой тяги.
Памятливый45> Опаньки69 ! Смею развеять Вашу недограмотность, но кроме тяги ракета нуждается и некоторых других технических параметах , например в устойчивости и управляемости.
Устойчивость и управляемость при взлёте турболётов и ракетолётов типа LLRV, Surveyor и LM осуществлялась помощью системы ориентации (СО), состоящей из датчиков, анализирующего и управляющего устройства и специальных небольших ракетных двигателей (ДСО). Причём на LLRV и LM в качестве анализирующего и управляющего устройства использовалась бортовая ЭВМ.
Опаньки69>> На LLRV отрабатывались общие принципы полёта, вертикального взлёта и посадки для подобных аппаратов (LM, Surveyor), а вопросы подготовленности поверхности для отработки этих принципов значения не имели.
Памятливый45> Опаньки69 -Вы немного врете.
Памятливый45> "Чтобы изучить проблемы устойчивости и управляемости реактивных вертикально взлетающих самолётов, строят специальные летающие стенды, которые внешне мало напоминают летательный аппарат. У нас в стране проходит испытание летающий стенд "Турбулет", построенный под руководством А.Н.Рафаэльянца и В.Н.Матвеева"("Безаэродромная авиация" Е.И.Ружицкий, Москва 1959 г.)
А вот здесь я приведу описание обещанного выше эксперимента.
"Научным руководителем этих работ являлся В.Н. Матвеев, ведущим инженером А.И. Квашнин, главным конструктором турболета А.Н. Рафаэлянц, инженером-конструктором Г.Н. Лапшин, инженером по эксплуатации Г.И. Кобец, ведущим летчиком-испытателем Ю.А. Гарнаев. Облетывал аппарат в 1957 г. летчик-испытатель Г.Н. Захаров.
На турболете было решено установить двигатель РД-9БП в вертикальном положении. Для исследования работы двигателя в такой нестандартной ситуации построили под руководством О. Константинова специальный стенд, где весной 1955 г. группа инженера С. Щербакова приступила к проведению ряда последовательных экспериментов. По воспоминаниям их участника, инженера О.А.Богомягкова, стенд представлял собой четырехгранную пирамиду, смонтированную в виде фермы из профильных стальных балок на бетонном основании. В центре закреплялся двигатель, в нижней части конструкции устанавливались температурные датчики и термосвидетели.
На первом этапе использовался двигатель РД-45Ф с центробежным компрессором, установленный на истребителе МиГ-15.
На втором этапе ТРД находился в вертикальном положении. Управление двигателем осуществлялось РУДом через длинный трос или гидропривод. Для питания использолась не штатная бортовая топливная система, а установленный на безопасное расстояние топливный бак.
На заключительном этапе, летом 1956 г., исследовалс вертикальном положении двигатель РД-9БП с осевым компрессором, предназначенный для турболета. Чтобы облегчить ТРД, вместо форсажной камеры с соответствующей топливной аппаратурой установили нерегулируемое реактивное сопло.
Результаты экспериментов показали работоспособность ТРД в необычной позиции. Оказалось, что выхлопная газовая струя растекается равномерно во все стороны тонкой веерообразной пеленой над ВПП от места ее удара, не поднимаясь вверх. Таким образом, двигатель работает в благоприятных для старта условиях.
Серьезной проблемой оставалось недостаточные устойчивость и управляемость турболета. Малейшая допущенная пилотом неточность - и аппарат мог опрокинуться.
Весьма опасался этого Ю.А. Гарнаев, которому поручили испытывать «летающий стенд». Полеты выполнялись на незначительной высоте, поэтому о применении парашюта не могло быть и речи.
Турболет не имел ни фюзеляжа, ни крыльев, ни винта. Вся конструкция -сварная ферма, посередине которой находился двигатель и кабина пилота. Его устойчивость в воздухе обеспечивали газовые и струйные рули, управлять которыми оказалось не так-то просто. По воспоминаниям Богомягкова, в ЛИИ придумали специальные приспособление регулирования тяги."
http://vtol.boom.ru//limg.imgsmail.ru/r/speeddial.png [not image]
@MAIL.RU: почта, поиск в интернете, новости, работа, развлечения. Почта @Mail.Ru — бесплатная почта №1
Национальная почтовая служба @Mail.ru — лучшая бесплатная почта. Доступ к почте через POP/SMTP, веб- и wap-интерфейс. Также на портале: поиск в интернете, авто, новости, спорт, музыка, работа, знакомства, анекдоты, открытки, погода// vtol.boom.ru
Как мы видим проблемы для устойчивости и управляемости создавала вовсе не поверхность стартовой площадки, а сама конструкция аппарата, где средняя точка приложения тягового усилия находилась ниже центра масс аппарата, и таким образом конструкция получалась неустойчивой, как карандаш поставленный на остриё. Проблема эта была одинаково острой как вблизи поверхности, так и на достаточной высоте. К тому же советские инженеры и конструкторы решали эти проблемы ещё в 1956 году причём без применения бортовых ЭВМ, а используя только ручные механические и пневматические приспособления, типа газовых и струйных рулей.
"Десятки раз поднимал Гарнаев в воздух этот уникальный летательный аппарат. Он вспоминал, что в основном во время испытаний выясняли, с помощью каких рулей можно лучше управлять самолетом вертикального взлета и посадки. Имеются, как упомянуто выше, два вида рулей: газовые и струйные. Первые размещаются в струе газов, выходящих за двигателем, поэтому тесно связаны с режимом его работы и тягой. Вторые работают при помощи сжатого воздуха, который подается из компрессора реактивного двигателя. Оказалось, что сочетание этих двух типов рулей обеспечивает управляемость вертикально взлетающих аппаратов, а также дает возможность летать в любом направлении."
ДСО LLRV и LM по принципу управления аналогичны газовым рулям советского турболёта.
Памятливый45> ЛМ садился по тому же принципу, что и Сюрвейер (с попадающей орбиты).
Что вы имеете ввиду под термином "попадающая орбита"? Если траекторию, по которой аппарат от Земли попадал на поверхность Луны, то тут вы ошибаетесь. Аполлон сперва выходил на окололунную (селеноцентрическую, как тогда говорили) орбиту. Затем лунный модуль отстыковывался от основного командно-служебного модуля и начинал торможение, переходя на посадочную траекторию. Причём торможение и посадка проходили в три этапа, которые достаточно хорошо описаны у Шунейко, и на каждом этапе использовались несколько программ для бортовой ЭВМ по выбору пилота - автоматический, полуавтоматический и полностью ручной режимы.
Не ошибается тот, кто ничего не делает.
Это сообщение редактировалось 15.11.2009 в 17:18
вы находитесь …, в разделе, посвящённом вопросу о том, была ли 20-м веке ракета, взлетающая с неподготовленной поверхности.
Опаньки69> Напоминаю вам, что мы находимся в разделе "Американцы на Луне - были или нет?" в теме посвящённой вопросу "В 20 веке ракеты не только садиться на неподготовленную поверхность не могли, но и взлететь с неё?". А это означает, что мы тут рассматриваем вопросы не только взлёта, но и посадки в применении к посадке лунного модуля (ЛМ) Аполлона.
Уважаемый Опаньки69!
До Вас дошло, что взлёта не было.
Вы желаете обсудить посадку без взлёта?
Не уверен, что Ваша идея хорошая, но учитывая большой объём текста, подготовленный Вами и явный труд на его структурирование, считаю невежливым не ответить Вам.
Опаньки69> 1. Судя по названию раздела, неподготовленной поверхностью мы можем считать поверхность аналогичную той, которая находится в местах посадок Аполлонов на Луне. А что мы имеем на месте посадок? Мы имеем относительно ровную поверхность достаточно плотного лунного грунта (реголита) с неглубоким более рыхлым верхним слоем, на которой кое-где находятся кратеры от падений метеоритов различного диаметра и глубины и камни различного размера и формы.
В этом месте вынужден процитировать Шунейко глава4,3:
«Когда лунный корабль, снизился до высоты H=140 м, Н. Армстронг увидел, что автопилот ведет корабль на посадку в кратер размерами с футбольное поле, усеянный крупными камнями до 3 м в поперечнике».
Я долгие десятилетия жил не Земле, но футбольное поле, заполненное влунами диаметром до 3-х метров ни разу не видел. А на Луне с первой попытки вышли на такое поле. Кстати аппологеты ни разу не показали фотографию этого поля.
Опаньки69> 2. Рассмотрим технологию вертикального взлёта. Что нам нужно, чтобы аппарат взлетел? Нам нужно, чтобы аппарат обладал двигателем создающим достаточное тяговое усилие, по вектору совпадающее с вертикальной осью аппарата. Что нам ещё нужно? Нам нужно, чтобы аппарат не опрокинулся во время взлёта, а для этого нам нужно устройство для стабилизации его вертикального положения в полёте. В качестве такого устройства можно использовать систему ориентации (СО), которая состоит из специальных датчиков отклонения от вертикали, набора небольших ракетных двигателей (ДСО), а также анализирующего и управляющего устройства, которое на основе информации с датчиков может выдавать сигналы на включение и выключение определённых ДСО для необходимой стабилизации. Теперь посмотрим, каким образом тут участвует неподготовленная поверхность. Для взлёта имеет значение только угол отклонения аппарата от вертикали. Необходимо только, чтобы этот угол не превышал предельно допустимую величину. Неровность самой поверхности на вектор тяги не оказывает никакого влияния, если только аппарат не прижимается соплом вплотную к опорной поверхности. Если же аппарат стоит на специальных опорах, и между соплом и этой поверхностью существует достаточный зазор, то неровность и рыхлость поверхности значения не имеют. Это логически вытекает из того факта, что тяговое усилие создаётся в результате расширения сильно нагретого газа, струя которого истекает из сопла двигателя с большой скоростью, сообщая двигателю импульс в направлении противоположном истечению. При этом молекулы газа, сообщив импульс двигателю, улетают из сопла, как пули из ружья, и уже не оказывают воздействия на двигатель и вектор его тяги. При этом отражения струи от поверхности обратно вверх не происходит, о чём говорят результаты многочисленных экспериментов. Описание одного из них я приведу чуть ниже. Из всего вышесказанного можно сделать вывод, что на технологию взлёта с неподготовленной поверхности сама поверхность практически никакого влияния не оказывает, т.е. взлёт происходит одинаково в независимости от степени неровности и рыхлости поверхности, более того, это происходит так, как будто поверхности нет вообще.
То есть интерференцию Вы отрицаете или не знаете про неё.
А поскольку «отражения струи от поверхности обратно вверх не происходит», то , по-мнению Опаньки69, поверхность поглощает весь газ, вылетевший из сопла?
Я вечно путаю термины, Вы имеете ввиду адсорбцию или абсорбцию?
Вы пишите «достаточный зазор». Какой зазор ракетчиками считается достаточным?
С какой высоты "поверхности вообще нет" . Про экранопланы то хоть в мурзитке читали/
Опаньки69> 3. Теперь посмотрим, чем отличается турболёт от ракетолёта. Отличаются они только двигателем. У турболёта двигатель турбореактивный, а у ракетолёта - ракетный. Есть ли между ними разница в технологии взлёта/посадки? Да никакой разницы нет - и там, и там используется реактивный принцип движения. Рабочее тело в камере сгорания нагревается за счёт идущей в нём реакции окисления топлива. Рабочее тело (газ) расширяется в результате сильного нагревания, и струя раскалённого газа с высокой скоростью истекает из сопла двигателя, придавая импульс двигателю по закону сохранения импульса. Так в чём же разница? А разница только в том, что в ракетном двигателе окислитель находится на борту аппарата, а в ТРД окислитель (кислород) берётся из атмосферного воздуха. Только эта разница никак не влияет на технологию взлёта/полёта/посадки, поведение аппаратов с ТРД и с РД будет схожим, и управление ими будет одинаковым. Таким образом мы с уверенностью можем сказать, что опыт, приобретённый при испытаниях турболёта, мы можем использовать при конструировании ракетолёта, а навыки пилота турболёта можно использовать при управлении ракетолётом.
Не можем. У ТРД и у ЖРД разные дроссельные характеристики.
Разная приемистость. Разные гироскопические моменты.
Разная картина распределения тяги между воздухозаборником и соплом.
Не знаю, может быть ещё что-то есть.
Факт остаётся фактом турбулёты летают в нескольких странах уже на протяжении без малого 60 лет, а пилотируемые ракетолёты на Земле никогда свободно (без верёвочки) не летали.
Опаньки69> 4. Теперь рассмотрим помехи для посадки, создаваемые неподготовленностью лунной поверхности. .... Как мы выяснили выше, неровность поверхности не оказывает влияния на вектор тяги двигателя аппарата, а это означает, что остаётся только риск опрокидывания аппарата, если при посадке опоры попадут на крупный камень или на крутой склон какого-либо кратера. Для этого, несмотря на наличие специального режима полностью автоматической посадки, реализуемого в виде подпрограммы в бортовом компьютере, пилоты лунных модулей обычно пользовались полуавтоматическим режимом, и сами выбирали место для посадки. Опоры у ЛМ были регулируемые по высоте, это значит, что ЛМ прочно вставал на относительно неровную в определённых пределах поверхность всеми четырьмя опорами.
Вот бы как было бы здорово, если бы ракетолёт смог приземлиться в 20-м веке на Земле, под присмотром команды испытателей. Ну примерно с таким же вниманием, как смотрят за посадкой нового самолёта на аэродроме специально обученные бригады испытателей.
Конечно они уже испытали каждую деталь, каждую систему автономно. Но вот выкатили из ангара Суперждет и с этого момента начинаются комплексные испытания.
Не взирая на то, что колёсные экипажи уже не одно тысячелетие бороздят просторы родной планеты, но первые комплексные испытания у самолёта –пробежки по аэродрому. И это в 21 веке.
Как Вы думаете , Зачем?
Опаньки69! Ваше заклинание о том, что Вам всё понятно базируется на Вашем незнании процесса испытания техники вообще.
Опанькт69 верит, что не имея в 20-м веке ни одного ракетолёта, американцы могли послать на Луну Лунный модуль с требованием полевитировать перед посадкой.
Программа стоит 25 миллиардов настоящих американских долларов. Программа осуществлялась во время войны, в которой американцы потеряли десятки тыcячm солдат и офицеров, войны которую америка проиграла.И они ясно знали, что проигрывают.
И Вы будете вешать лапшу, что никто не попробовал на Земле испытать ни один ракетолёт в свободном полёте в принципе?
Возьмите к примеру шасси Лунного Модуля.
Ну железка и железка. Вот её то испытывали десятки если не сотни раз.
Спрашивается зачем, если предыдущий этап – зависание на поверхностью, левитирование, никто не испытал.
Опаньки69> 5. Исходя из всего вышесказанного мы можем ответить и на пятый вопрос. Да, взлетев с бетонированной площадки турболёт или ракетолёт мог приземлиться на неподготовленную поверхность типа той, которая была на Луне в местах посадки Аполлонов. Он мог приземлиться и на относительно неровную в определённых пределах, конечно, грунтовую площадку, и на песчанный пляж, и на травку, и на поверхность с небольшими камнями и кратерами. А это означает, что для отработки технологии посадки на неподготовленную поверхность вовсе необязательно взлетать с такой поверхности,
Уважаемый Опаньки69!
Во -первых ни что из выше изложенного ни разу не катит.
Во –вторых ракетолёт не взлетев ни разу не мог ни разу сесть.
Его вообще не существовало в природе до 21 века с его Армадилло или DC-X
Но вообразите, что турбулёт, который Вы нашли, сел на пригорочке.
А дальше его как –то надо вернуть назад в ангар. И тут выяснится, что с пригорочка он не взлетабелен!!!
Да с Луны Турбулёту взлетать было не надо, но садиться на неровную поверхность то он должен был. Вы и сами могли заметить, что Шасси его не авиационное, а напоминающее шасси ЛМ. И щупы метровые торчали вниз.
То есть американский LLRV должен был сесть пусть на подготовленную, но на неровную поверхность, имитирующую некоторые камни или неровности.
Но посадки такой нам не показали. Столько лет прошло, а кадров аварий этих аппаратов нет.А сколько людей на них побилось Вам сообщали?
Причина проста, Вам Опаньки69 такое лучше не показывать.
Опаньки69> (продолжает) И наконец, мы можем сказать, что всё выше сказанное имеет прямое отношение к заявленной теме, ибо показывает, что для отработки технологии мягкой вертикальной посадки аппарата с ракетным двигателем на неподготовленную поверхность, вовсе не обязательно иметь прототип умеющий взлетать с неё, а достаточно отработать отдельные моменты причём на разных аппаратах, например, так, как это было сделано в программе "Аполлон". Как? Смотри ниже.
А кто сказал, что «Аполлон» использовал «технологию мягкой вертикальной посадки аппарата с ракетным двигателем на неподготовленную поверхность»?
По такой технологии садилась Луна-9 и Сюрвейеры.
А песня про пилотируемую часть лунной программы США гласит, что «Аполлон» садился на Луну по технологии Луны-15.
Тут и парение над поверхностью и выбор места посадки.
Я утверждаю, что Лунный модуль был отработан только на те маневры, которые в состоянии был выполнить Сюовейер, а это ещё раз процитирую Ваше высказывание:
«технологии мягкой вертикальной посадки аппарата с ракетным двигателем на неподготовленную поверхность».
Ну вроде бы всё.
Но полностью сдать тему старта с неподготовленной поверхности Опаньки69 не хочет. И приводит хотелку инженеров НАСА от которой отказались:
Опаньки69> Отказ от его проведения был мотивирован руководителями программы тем, что остаток топлива мог обеспечить перемещение аппарата на небольшое расстояние, в пределах которого не было достаточно интересных элементов рельефа (на расстоянии до 300 м не наблюдалось топографических условий, сколько-нибудь отличающихся от места посадки)..."
Так, что остановимся на полёте ракетолёта на высоту 3-х метров.
Всё остальное имеет сослагательное наклонение.
Дальше Опаньки 69 попытался откомментировать роль отдельных элеметов ТРД в создании продольной тяги.
Опаньки69>> Реактивный двигатель сочетает в себе собственно двигатель с движителем, то есть он создаёт тяговое усилие только за счёт взаимодействия с рабочим телом, без опоры или контакта с другими телами.
Памятливый45> Ну здесь сразу вас надо остановить как заговорившегося в неправильною сторону (ТРД имеет контакт воздухозаборником примерно в 30% тяги).
Опаньки69> И что? Этот контакт не используется напрямую для создания тягового усилия. ….Во входном устройстве осуществляется рост статического давления воздуха за счёт торможения воздушного потока.
Вот же интересно как сильно в воздухозаборнике турбулёте тормозится воздушный поток.?
Проработайте вопрос, чтобы не только цитата из неназванного источника , но мысль была. Ведь вертикальная скорость турбулёта близка к нулевой, куда ниже нуля тормозить?
Памятливый45> Опаньки69 под Ваше определение реактивного двигателя -движителя подпадаут и вертолётные установки.
Опаньки69> Не подпадут. Вертолётный двигатель не использует для создания тягового усилия струю раскалённых газов, получающуюся в результате теплового расширения рабочего тела и придающую по закону сохранения импульса двигателю импульс обратный по направлению вектору скорости реактивной струи.
Куда же у него выхлоп девается. В небо уходит как у паровоза?
Опаньки69>> ... Легко видеть, что качество поверхности, с которой вертикально взлетает или на которую совершает вертикальную мягкую посадку аппарат с реактивным двигателем, никак не влияет ни на тягу двигателя, ни на направление вектора этой тяги.
Памятливый45> Опаньки69 ! Смею развеять Вашу недограмотность, но кроме тяги ракета нуждается и некоторых других технических параметах , например в устойчивости и управляемости.
Опаньки69> Устойчивость и управляемость при взлёте турболётов и ракетолётов типа LLRV, Surveyor и LM осуществлялась помощью системы ориентации (СО), состоящей из датчиков, анализирующего и управляющего устройства и специальных небольших ракетных двигателей (ДСО). Причём на LLRV и LM в качестве анализирующего и управляющего устройства использовалась бортовая ЭВМ.
Всё смешалось в доме Обломовых.
Появление «ракетолётов типа LLRV», хотя указанный аппарат использовал ТРД, только предшествовало полному смешению понятий устойчивости.
ЭВМ помогала. ЭВМ помогала рулить турбулётам. Как без ЭВМ обошлись Луна-9 и Сюрвейеры?
Опаньки69>> На LLRV отрабатывались общие принципы полёта, вертикального взлёта и посадки для подобных аппаратов (LM, Surveyor), а вопросы подготовленности поверхности для отработки этих принципов значения не имели.
Памятливый45> Опаньки69 -Вы немного врете.
Памятливый45> "Чтобы изучить проблемы устойчивости и управляемости реактивных вертикально взлетающих самолётов, строят специальные летающие стенды, которые внешне мало напоминают летательный аппарат. У нас в стране проходит испытание летающий стенд "Турбулет", построенный под руководством А.Н.Рафаэльянца и В.Н.Матвеева"("Безаэродромная авиация" Е.И.Ружицкий, Москва 1959 г.)
Далее Опаньки69 не торопится извиняться за сбрёхнутое , а грузит гигантской цитатой, из которой я выделю только эту часть:
"Десятки раз поднимал Гарнаев в воздух этот уникальный летательный аппарат. Он вспоминал, что в основном во время испытаний выясняли, с помощью каких рулей можно лучше управлять самолетом вертикального взлета и посадки. "
Так , что не для звездолётов, а для самолётов запускали турбулёты в СССР и в Великобритании.
И грамотный человек должен знать название этих серийных самолётов.
А Вам бы я посоветовал забрать назад дезинформацию о том, что турбулёты создавались для отработки принципы полёта ЛМ.
Опаньки69> ДСО LLRV и LM по принципу управления аналогичны газовым рулям советского турболёта.
Даже не аналогичны газовым рулям капиталлистического по духу английского турбулёта.
Памятливый45> ЛМ садился по тому же принципу, что и Сюрвейер (с попадающей орбиты).
Опаньки69> Что вы имеете ввиду под термином "попадающая орбита"? Если траекторию, по которой аппарат от Земли попадал на поверхность Луны, то тут вы ошибаетесь. Аполлон сперва выходил на окололунную (селеноцентрическую, как тогда говорили) орбиту. Затем лунный модуль отстыковывался от основного командно-служебного модуля и начинал торможение, переходя на посадочную траекторию. Причём торможение и посадка проходили в три этапа, которые достаточно хорошо описаны у Шунейко, и на каждом этапе использовались несколько программ для бортовой ЭВМ по выбору пилота - автоматический, полуавтоматический и полностью ручной режимы.
Ну это всё сказки, неподтверждённые ни одной фотографией испытания ракеты на Земле.
Для начала нет взлёта с неподготовленной поверхности.
В принципе.
Более того в Вашей цитате привели такую картину взаимодействия струи и бетенной полоса, что любой валун, лежащий встроне от Турбулёта мог изменить «плавную» картину.
Поэтому даже установив на LLRV шасси Лунного модуля американцы побоялись посадить его на небетонное основание.
Опаньки69> Напоминаю вам, что мы находимся в разделе "Американцы на Луне - были или нет?" в теме посвящённой вопросу "В 20 веке ракеты не только садиться на неподготовленную поверхность не могли, но и взлететь с неё?". А это означает, что мы тут рассматриваем вопросы не только взлёта, но и посадки в применении к посадке лунного модуля (ЛМ) Аполлона.
Уважаемый Опаньки69!
До Вас дошло, что взлёта не было.
Вы желаете обсудить посадку без взлёта?
Не уверен, что Ваша идея хорошая, но учитывая большой объём текста, подготовленный Вами и явный труд на его структурирование, считаю невежливым не ответить Вам.
Опаньки69> 1. Судя по названию раздела, неподготовленной поверхностью мы можем считать поверхность аналогичную той, которая находится в местах посадок Аполлонов на Луне. А что мы имеем на месте посадок? Мы имеем относительно ровную поверхность достаточно плотного лунного грунта (реголита) с неглубоким более рыхлым верхним слоем, на которой кое-где находятся кратеры от падений метеоритов различного диаметра и глубины и камни различного размера и формы.
В этом месте вынужден процитировать Шунейко глава4,3:
«Когда лунный корабль, снизился до высоты H=140 м, Н. Армстронг увидел, что автопилот ведет корабль на посадку в кратер размерами с футбольное поле, усеянный крупными камнями до 3 м в поперечнике».
Я долгие десятилетия жил не Земле, но футбольное поле, заполненное влунами диаметром до 3-х метров ни разу не видел. А на Луне с первой попытки вышли на такое поле. Кстати аппологеты ни разу не показали фотографию этого поля.
Опаньки69> 2. Рассмотрим технологию вертикального взлёта. Что нам нужно, чтобы аппарат взлетел? Нам нужно, чтобы аппарат обладал двигателем создающим достаточное тяговое усилие, по вектору совпадающее с вертикальной осью аппарата. Что нам ещё нужно? Нам нужно, чтобы аппарат не опрокинулся во время взлёта, а для этого нам нужно устройство для стабилизации его вертикального положения в полёте. В качестве такого устройства можно использовать систему ориентации (СО), которая состоит из специальных датчиков отклонения от вертикали, набора небольших ракетных двигателей (ДСО), а также анализирующего и управляющего устройства, которое на основе информации с датчиков может выдавать сигналы на включение и выключение определённых ДСО для необходимой стабилизации. Теперь посмотрим, каким образом тут участвует неподготовленная поверхность. Для взлёта имеет значение только угол отклонения аппарата от вертикали. Необходимо только, чтобы этот угол не превышал предельно допустимую величину. Неровность самой поверхности на вектор тяги не оказывает никакого влияния, если только аппарат не прижимается соплом вплотную к опорной поверхности. Если же аппарат стоит на специальных опорах, и между соплом и этой поверхностью существует достаточный зазор, то неровность и рыхлость поверхности значения не имеют. Это логически вытекает из того факта, что тяговое усилие создаётся в результате расширения сильно нагретого газа, струя которого истекает из сопла двигателя с большой скоростью, сообщая двигателю импульс в направлении противоположном истечению. При этом молекулы газа, сообщив импульс двигателю, улетают из сопла, как пули из ружья, и уже не оказывают воздействия на двигатель и вектор его тяги. При этом отражения струи от поверхности обратно вверх не происходит, о чём говорят результаты многочисленных экспериментов. Описание одного из них я приведу чуть ниже. Из всего вышесказанного можно сделать вывод, что на технологию взлёта с неподготовленной поверхности сама поверхность практически никакого влияния не оказывает, т.е. взлёт происходит одинаково в независимости от степени неровности и рыхлости поверхности, более того, это происходит так, как будто поверхности нет вообще.
То есть интерференцию Вы отрицаете или не знаете про неё.
А поскольку «отражения струи от поверхности обратно вверх не происходит», то , по-мнению Опаньки69, поверхность поглощает весь газ, вылетевший из сопла?
Я вечно путаю термины, Вы имеете ввиду адсорбцию или абсорбцию?
Вы пишите «достаточный зазор». Какой зазор ракетчиками считается достаточным?
С какой высоты "поверхности вообще нет" . Про экранопланы то хоть в мурзитке читали/
Опаньки69> 3. Теперь посмотрим, чем отличается турболёт от ракетолёта. Отличаются они только двигателем. У турболёта двигатель турбореактивный, а у ракетолёта - ракетный. Есть ли между ними разница в технологии взлёта/посадки? Да никакой разницы нет - и там, и там используется реактивный принцип движения. Рабочее тело в камере сгорания нагревается за счёт идущей в нём реакции окисления топлива. Рабочее тело (газ) расширяется в результате сильного нагревания, и струя раскалённого газа с высокой скоростью истекает из сопла двигателя, придавая импульс двигателю по закону сохранения импульса. Так в чём же разница? А разница только в том, что в ракетном двигателе окислитель находится на борту аппарата, а в ТРД окислитель (кислород) берётся из атмосферного воздуха. Только эта разница никак не влияет на технологию взлёта/полёта/посадки, поведение аппаратов с ТРД и с РД будет схожим, и управление ими будет одинаковым. Таким образом мы с уверенностью можем сказать, что опыт, приобретённый при испытаниях турболёта, мы можем использовать при конструировании ракетолёта, а навыки пилота турболёта можно использовать при управлении ракетолётом.
Не можем. У ТРД и у ЖРД разные дроссельные характеристики.
Разная приемистость. Разные гироскопические моменты.
Разная картина распределения тяги между воздухозаборником и соплом.
Не знаю, может быть ещё что-то есть.
Факт остаётся фактом турбулёты летают в нескольких странах уже на протяжении без малого 60 лет, а пилотируемые ракетолёты на Земле никогда свободно (без верёвочки) не летали.
Опаньки69> 4. Теперь рассмотрим помехи для посадки, создаваемые неподготовленностью лунной поверхности. .... Как мы выяснили выше, неровность поверхности не оказывает влияния на вектор тяги двигателя аппарата, а это означает, что остаётся только риск опрокидывания аппарата, если при посадке опоры попадут на крупный камень или на крутой склон какого-либо кратера. Для этого, несмотря на наличие специального режима полностью автоматической посадки, реализуемого в виде подпрограммы в бортовом компьютере, пилоты лунных модулей обычно пользовались полуавтоматическим режимом, и сами выбирали место для посадки. Опоры у ЛМ были регулируемые по высоте, это значит, что ЛМ прочно вставал на относительно неровную в определённых пределах поверхность всеми четырьмя опорами.
Вот бы как было бы здорово, если бы ракетолёт смог приземлиться в 20-м веке на Земле, под присмотром команды испытателей. Ну примерно с таким же вниманием, как смотрят за посадкой нового самолёта на аэродроме специально обученные бригады испытателей.
Конечно они уже испытали каждую деталь, каждую систему автономно. Но вот выкатили из ангара Суперждет и с этого момента начинаются комплексные испытания.
Не взирая на то, что колёсные экипажи уже не одно тысячелетие бороздят просторы родной планеты, но первые комплексные испытания у самолёта –пробежки по аэродрому. И это в 21 веке.
Как Вы думаете , Зачем?
Опаньки69! Ваше заклинание о том, что Вам всё понятно базируется на Вашем незнании процесса испытания техники вообще.
Опанькт69 верит, что не имея в 20-м веке ни одного ракетолёта, американцы могли послать на Луну Лунный модуль с требованием полевитировать перед посадкой.
Программа стоит 25 миллиардов настоящих американских долларов. Программа осуществлялась во время войны, в которой американцы потеряли десятки тыcячm солдат и офицеров, войны которую америка проиграла.И они ясно знали, что проигрывают.
И Вы будете вешать лапшу, что никто не попробовал на Земле испытать ни один ракетолёт в свободном полёте в принципе?
Возьмите к примеру шасси Лунного Модуля.
Ну железка и железка. Вот её то испытывали десятки если не сотни раз.
Спрашивается зачем, если предыдущий этап – зависание на поверхностью, левитирование, никто не испытал.
Опаньки69> 5. Исходя из всего вышесказанного мы можем ответить и на пятый вопрос. Да, взлетев с бетонированной площадки турболёт или ракетолёт мог приземлиться на неподготовленную поверхность типа той, которая была на Луне в местах посадки Аполлонов. Он мог приземлиться и на относительно неровную в определённых пределах, конечно, грунтовую площадку, и на песчанный пляж, и на травку, и на поверхность с небольшими камнями и кратерами. А это означает, что для отработки технологии посадки на неподготовленную поверхность вовсе необязательно взлетать с такой поверхности,
Уважаемый Опаньки69!
Во -первых ни что из выше изложенного ни разу не катит.
Во –вторых ракетолёт не взлетев ни разу не мог ни разу сесть.
Его вообще не существовало в природе до 21 века с его Армадилло или DC-X
Но вообразите, что турбулёт, который Вы нашли, сел на пригорочке.
А дальше его как –то надо вернуть назад в ангар. И тут выяснится, что с пригорочка он не взлетабелен!!!
Да с Луны Турбулёту взлетать было не надо, но садиться на неровную поверхность то он должен был. Вы и сами могли заметить, что Шасси его не авиационное, а напоминающее шасси ЛМ. И щупы метровые торчали вниз.
То есть американский LLRV должен был сесть пусть на подготовленную, но на неровную поверхность, имитирующую некоторые камни или неровности.
Но посадки такой нам не показали. Столько лет прошло, а кадров аварий этих аппаратов нет.А сколько людей на них побилось Вам сообщали?
Причина проста, Вам Опаньки69 такое лучше не показывать.
Опаньки69> (продолжает) И наконец, мы можем сказать, что всё выше сказанное имеет прямое отношение к заявленной теме, ибо показывает, что для отработки технологии мягкой вертикальной посадки аппарата с ракетным двигателем на неподготовленную поверхность, вовсе не обязательно иметь прототип умеющий взлетать с неё, а достаточно отработать отдельные моменты причём на разных аппаратах, например, так, как это было сделано в программе "Аполлон". Как? Смотри ниже.
А кто сказал, что «Аполлон» использовал «технологию мягкой вертикальной посадки аппарата с ракетным двигателем на неподготовленную поверхность»?
По такой технологии садилась Луна-9 и Сюрвейеры.
А песня про пилотируемую часть лунной программы США гласит, что «Аполлон» садился на Луну по технологии Луны-15.
Тут и парение над поверхностью и выбор места посадки.
Я утверждаю, что Лунный модуль был отработан только на те маневры, которые в состоянии был выполнить Сюовейер, а это ещё раз процитирую Ваше высказывание:
«технологии мягкой вертикальной посадки аппарата с ракетным двигателем на неподготовленную поверхность».
Ну вроде бы всё.
Но полностью сдать тему старта с неподготовленной поверхности Опаньки69 не хочет. И приводит хотелку инженеров НАСА от которой отказались:
Опаньки69> Отказ от его проведения был мотивирован руководителями программы тем, что остаток топлива мог обеспечить перемещение аппарата на небольшое расстояние, в пределах которого не было достаточно интересных элементов рельефа (на расстоянии до 300 м не наблюдалось топографических условий, сколько-нибудь отличающихся от места посадки)..."
Так, что остановимся на полёте ракетолёта на высоту 3-х метров.
Всё остальное имеет сослагательное наклонение.
Дальше Опаньки 69 попытался откомментировать роль отдельных элеметов ТРД в создании продольной тяги.
Опаньки69>> Реактивный двигатель сочетает в себе собственно двигатель с движителем, то есть он создаёт тяговое усилие только за счёт взаимодействия с рабочим телом, без опоры или контакта с другими телами.
Памятливый45> Ну здесь сразу вас надо остановить как заговорившегося в неправильною сторону (ТРД имеет контакт воздухозаборником примерно в 30% тяги).
Опаньки69> И что? Этот контакт не используется напрямую для создания тягового усилия. ….Во входном устройстве осуществляется рост статического давления воздуха за счёт торможения воздушного потока.
Вот же интересно как сильно в воздухозаборнике турбулёте тормозится воздушный поток.?
Проработайте вопрос, чтобы не только цитата из неназванного источника , но мысль была. Ведь вертикальная скорость турбулёта близка к нулевой, куда ниже нуля тормозить?
Памятливый45> Опаньки69 под Ваше определение реактивного двигателя -движителя подпадаут и вертолётные установки.
Опаньки69> Не подпадут. Вертолётный двигатель не использует для создания тягового усилия струю раскалённых газов, получающуюся в результате теплового расширения рабочего тела и придающую по закону сохранения импульса двигателю импульс обратный по направлению вектору скорости реактивной струи.
Куда же у него выхлоп девается. В небо уходит как у паровоза?
Опаньки69>> ... Легко видеть, что качество поверхности, с которой вертикально взлетает или на которую совершает вертикальную мягкую посадку аппарат с реактивным двигателем, никак не влияет ни на тягу двигателя, ни на направление вектора этой тяги.
Памятливый45> Опаньки69 ! Смею развеять Вашу недограмотность, но кроме тяги ракета нуждается и некоторых других технических параметах , например в устойчивости и управляемости.
Опаньки69> Устойчивость и управляемость при взлёте турболётов и ракетолётов типа LLRV, Surveyor и LM осуществлялась помощью системы ориентации (СО), состоящей из датчиков, анализирующего и управляющего устройства и специальных небольших ракетных двигателей (ДСО). Причём на LLRV и LM в качестве анализирующего и управляющего устройства использовалась бортовая ЭВМ.
Всё смешалось в доме Обломовых.
Появление «ракетолётов типа LLRV», хотя указанный аппарат использовал ТРД, только предшествовало полному смешению понятий устойчивости.
ЭВМ помогала. ЭВМ помогала рулить турбулётам. Как без ЭВМ обошлись Луна-9 и Сюрвейеры?
Опаньки69>> На LLRV отрабатывались общие принципы полёта, вертикального взлёта и посадки для подобных аппаратов (LM, Surveyor), а вопросы подготовленности поверхности для отработки этих принципов значения не имели.
Памятливый45> Опаньки69 -Вы немного врете.
Памятливый45> "Чтобы изучить проблемы устойчивости и управляемости реактивных вертикально взлетающих самолётов, строят специальные летающие стенды, которые внешне мало напоминают летательный аппарат. У нас в стране проходит испытание летающий стенд "Турбулет", построенный под руководством А.Н.Рафаэльянца и В.Н.Матвеева"("Безаэродромная авиация" Е.И.Ружицкий, Москва 1959 г.)
Далее Опаньки69 не торопится извиняться за сбрёхнутое , а грузит гигантской цитатой, из которой я выделю только эту часть:
"Десятки раз поднимал Гарнаев в воздух этот уникальный летательный аппарат. Он вспоминал, что в основном во время испытаний выясняли, с помощью каких рулей можно лучше управлять самолетом вертикального взлета и посадки. "
Так , что не для звездолётов, а для самолётов запускали турбулёты в СССР и в Великобритании.
И грамотный человек должен знать название этих серийных самолётов.
А Вам бы я посоветовал забрать назад дезинформацию о том, что турбулёты создавались для отработки принципы полёта ЛМ.
Опаньки69> ДСО LLRV и LM по принципу управления аналогичны газовым рулям советского турболёта.
Даже не аналогичны газовым рулям капиталлистического по духу английского турбулёта.
Памятливый45> ЛМ садился по тому же принципу, что и Сюрвейер (с попадающей орбиты).
Опаньки69> Что вы имеете ввиду под термином "попадающая орбита"? Если траекторию, по которой аппарат от Земли попадал на поверхность Луны, то тут вы ошибаетесь. Аполлон сперва выходил на окололунную (селеноцентрическую, как тогда говорили) орбиту. Затем лунный модуль отстыковывался от основного командно-служебного модуля и начинал торможение, переходя на посадочную траекторию. Причём торможение и посадка проходили в три этапа, которые достаточно хорошо описаны у Шунейко, и на каждом этапе использовались несколько программ для бортовой ЭВМ по выбору пилота - автоматический, полуавтоматический и полностью ручной режимы.
Ну это всё сказки, неподтверждённые ни одной фотографией испытания ракеты на Земле.
Для начала нет взлёта с неподготовленной поверхности.
В принципе.
Более того в Вашей цитате привели такую картину взаимодействия струи и бетенной полоса, что любой валун, лежащий встроне от Турбулёта мог изменить «плавную» картину.
Поэтому даже установив на LLRV шасси Лунного модуля американцы побоялись посадить его на небетонное основание.
Памятливый45> вы находитесь …, в разделе, посвящённом вопросу о том, была ли 20-м веке ракета, взлетающая с неподготовленной поверхности.
Это не раздел, а тема. И называется она по другому. Поднимите глаза и прочитайте. Там и про взлёт, и про посадку.
Это не раздел, а тема. И называется она по другому. Поднимите глаза и прочитайте. Там и про взлёт, и про посадку.
Не ошибается тот, кто ничего не делает.
R
Жизнь коротка, путь искусства долог, удобный случай мимолетен, опыт обманчив.... Ἱπποκράτης
Памятливый45> До Вас дошло, что взлёта не было.
Памятливый45> Вы желаете обсудить посадку без взлёта?
В лунной программе НАСА взлёт непосредственно с поверхности Луны был только у Surveyor-6. Он подлетел в высоту на 3 м и переместился в сторону на 2,8 м. Других взлётов не было. Посадки были. На поверхность Луны село пять Сервейеров и шесть Аполлонов. В лунной программе СССР взлётов непосредственно с поверхности Луны не было. Посадки были. На поверхность Луны село 8 автоматических аппаратов "Луна".
Итого - 19 посадок и один взлёт на 3 метра.
Будем и дальше обсуждать вопрос о том, что если взлётов не было, то и посадок тоже быть не могло?
Памятливый45> Вы желаете обсудить посадку без взлёта?
В лунной программе НАСА взлёт непосредственно с поверхности Луны был только у Surveyor-6. Он подлетел в высоту на 3 м и переместился в сторону на 2,8 м. Других взлётов не было. Посадки были. На поверхность Луны село пять Сервейеров и шесть Аполлонов. В лунной программе СССР взлётов непосредственно с поверхности Луны не было. Посадки были. На поверхность Луны село 8 автоматических аппаратов "Луна".
Итого - 19 посадок и один взлёт на 3 метра.
Будем и дальше обсуждать вопрос о том, что если взлётов не было, то и посадок тоже быть не могло?
Не ошибается тот, кто ничего не делает.

Wyvern-2> R
Ай да ракетка. Необтекаемая, но смотрится неплохо. Ролик хорошего качества. Интересно, показалось или цвет факела у нее несколько необычный? На каком же топливе она летает?
Ай да ракетка. Необтекаемая, но смотрится неплохо. Ролик хорошего качества. Интересно, показалось или цвет факела у нее несколько необычный? На каком же топливе она летает?
Памятливый45> В этом месте вынужден процитировать Шунейко глава4,3:
Памятливый45> «Когда лунный корабль, снизился до высоты H=140 м, Н. Армстронг увидел, что автопилот ведет корабль на посадку в кратер размерами с футбольное поле, усеянный крупными камнями до 3 м в поперечнике».
Памятливый45> Я долгие десятилетия жил не Земле, но футбольное поле, заполненное влунами диаметром до 3-х метров ни разу не видел. А на Луне с первой попытки вышли на такое поле. Кстати аппологеты ни разу не показали фотографию этого поля.
1. Луна - это не Земля. Там не должно быть всё так же, как на Земле.
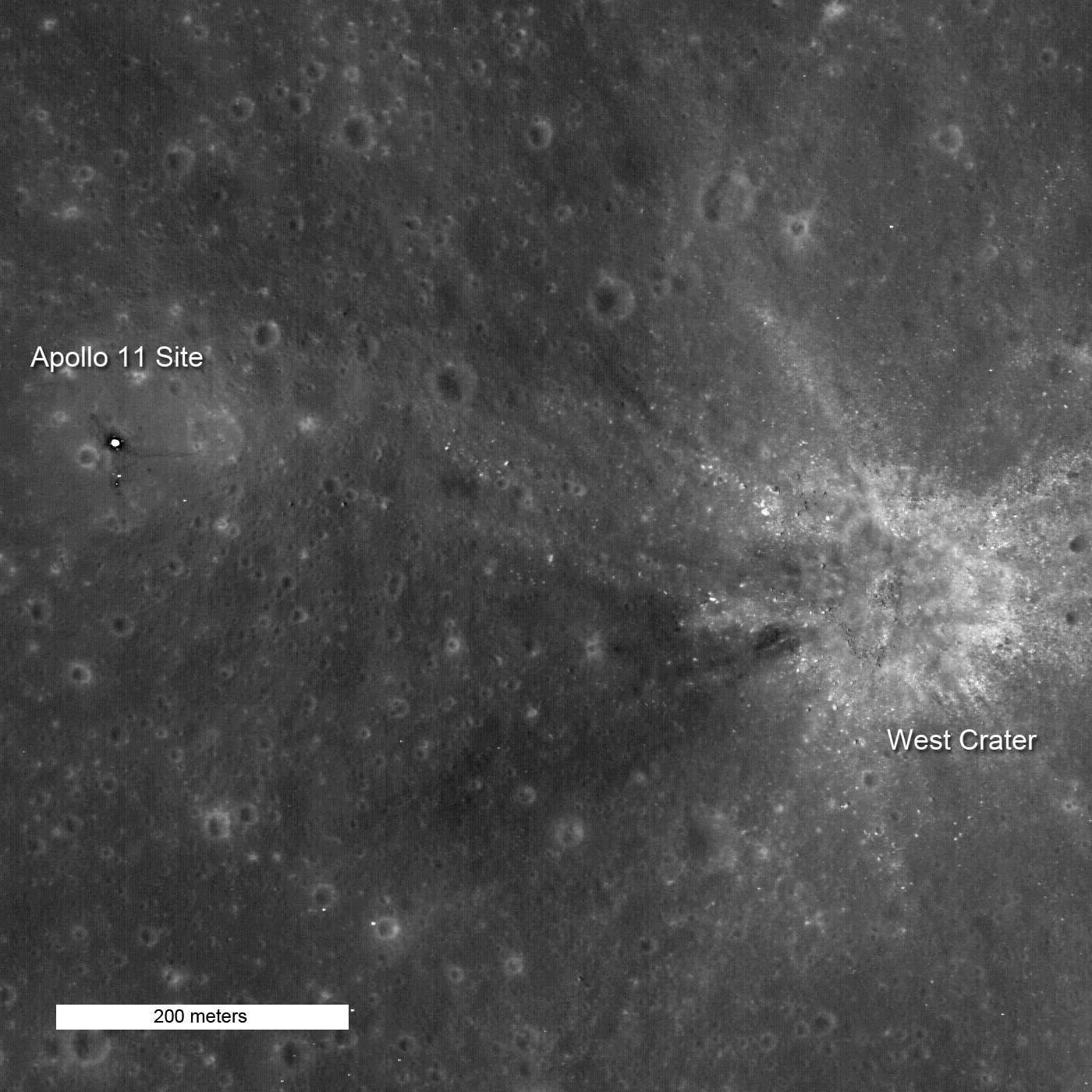
2. Не футбольное поле, а кратер размером с футбольное поле.
3. Астронавты не отходили от модуля дальше чем на 100 м, а большие камни были в кратере, и, следовательно, видны от модуля не были.
4. А фотографии только со спутника.
Памятливый45> То есть интерференцию Вы отрицаете или не знаете про неё.
Поведайте нам об интерференции. Просветите нас, сирых и убогих.")
И заодно расскажите нам, как этот загадочный эффект влияет на вектор тяги ракетного двигателя, а также, почему он не влияет на вектор тяги двигателя турбореактивного.")
Памятливый45> «Когда лунный корабль, снизился до высоты H=140 м, Н. Армстронг увидел, что автопилот ведет корабль на посадку в кратер размерами с футбольное поле, усеянный крупными камнями до 3 м в поперечнике».
Памятливый45> Я долгие десятилетия жил не Земле, но футбольное поле, заполненное влунами диаметром до 3-х метров ни разу не видел. А на Луне с первой попытки вышли на такое поле. Кстати аппологеты ни разу не показали фотографию этого поля.
1. Луна - это не Земля. Там не должно быть всё так же, как на Земле.
2. Не футбольное поле, а кратер размером с футбольное поле.
3. Астронавты не отходили от модуля дальше чем на 100 м, а большие камни были в кратере, и, следовательно, видны от модуля не были.
4. А фотографии только со спутника.
Памятливый45> То есть интерференцию Вы отрицаете или не знаете про неё.
Поведайте нам об интерференции. Просветите нас, сирых и убогих.
И заодно расскажите нам, как этот загадочный эффект влияет на вектор тяги ракетного двигателя, а также, почему он не влияет на вектор тяги двигателя турбореактивного.
Не ошибается тот, кто ничего не делает.
Это сообщение редактировалось 16.11.2009 в 20:18

Опаньки69> Поведайте нам об интерференции. Просветите нас, сирых и убогих.
И заодно расскажите нам, как этот загадочный эффект влияет на вектор тяги ракетного двигателя, а также, почему он не влияет на вектор тяги двигателя турбореактивного.
Предсказываю - потому что:
а) На Луне нет воздуха
б) Турбореактивный двигатель "имеет контакт воздухозаборником"
И заодно расскажите нам, как этот загадочный эффект влияет на вектор тяги ракетного двигателя, а также, почему он не влияет на вектор тяги двигателя турбореактивного.
Предсказываю - потому что:
а) На Луне нет воздуха
б) Турбореактивный двигатель "имеет контакт воздухозаборником"

Уважаемый Wyvern-2 привёл пример взлёта ракетолёта с поверхности , имитирющей неподготовленную поверхность.
Конечно аппарат Нортроп Грумман взлетел в 21-м веке, а не в 20-м.
Но как технологически правильно постален исследовательский полёт.
Ещё нет посадки на неподготовленную поверхность , но уже начаты исследования взлёта.
Как я в вышеприведённом сообщении предположил на ровную поверхность вне проекции сопла уложены гнсколько бульников, которые изменяют картину течения газов вдоль поверхности ВПП. Кстати эту картину описали в сообщении о турбулёте процитированном Опаньки69.
Благодарю.
Конечно аппарат Нортроп Грумман взлетел в 21-м веке, а не в 20-м.
Но как технологически правильно постален исследовательский полёт.
Ещё нет посадки на неподготовленную поверхность , но уже начаты исследования взлёта.
Как я в вышеприведённом сообщении предположил на ровную поверхность вне проекции сопла уложены гнсколько бульников, которые изменяют картину течения газов вдоль поверхности ВПП. Кстати эту картину описали в сообщении о турбулёте процитированном Опаньки69.
Благодарю.
Памятливый45> Конечно аппарат Нортроп Грумман взлетел в 21-м веке, а не в 20-м.
Памятливый45> Ещё нет посадки на неподготовленную поверхность , но уже начаты исследования взлёта.
Памятливый45> Как я в вышеприведённом сообщении предположил на ровную поверхность вне проекции сопла уложены гнсколько бульников, которые изменяют картину течения газов вдоль поверхности ВПП. Кстати эту картину описали в сообщении о турбулёте процитированном Опаньки69.
Вообще-то, это не "Нортроп Грумман", а Армадилло, это во-первых.
Во-вторых, взлетала эта хреновина с ровной площадки, а на булыжники садилась, и уже потом наоборот. На ролике заснят второй полёт.
В-третьих, как течение газов вдоль поверхности влияет на аппарат? Вы, уважаемый оппонент, нам так и не объяснили. Просим.
Памятливый45> Ещё нет посадки на неподготовленную поверхность , но уже начаты исследования взлёта.
Памятливый45> Как я в вышеприведённом сообщении предположил на ровную поверхность вне проекции сопла уложены гнсколько бульников, которые изменяют картину течения газов вдоль поверхности ВПП. Кстати эту картину описали в сообщении о турбулёте процитированном Опаньки69.
Вообще-то, это не "Нортроп Грумман", а Армадилло, это во-первых.
Во-вторых, взлетала эта хреновина с ровной площадки, а на булыжники садилась, и уже потом наоборот. На ролике заснят второй полёт.
В-третьих, как течение газов вдоль поверхности влияет на аппарат? Вы, уважаемый оппонент, нам так и не объяснили. Просим.
Не ошибается тот, кто ничего не делает.
Памятливый45>> Конечно аппарат Нортроп Грумман взлетел в 21-м веке, а не в 20-м.
Памятливый45>> Ещё нет посадки на неподготовленную поверхность , но уже начаты исследования взлёта.
Памятливый45>> Как я в вышеприведённом сообщении предположил на ровную поверхность вне проекции сопла уложены гнсколько бульников, которые изменяют картину течения газов вдоль поверхности ВПП. Кстати эту картину описали в сообщении о турбулёте процитированном Опаньки69.
Опаньки69> Вообще-то, это не "Нортроп Грумман", а Армадилло, это во-первых.
Кто заказывает в 21 -м веке музыку тот и танцует девушку. Аппарат вообще мог называться Пикселем. Ваше первое замечание -бессмысленно.
Опаньки69> Во-вторых, взлетала эта хреновина с ровной площадки, а на булыжники садилась, и уже потом наоборот. На ролике заснят второй полёт.
Ну так покажите первый взлёт. Он как и Вами показанного LLRV был с ровной поверхности. Ни сколечко не сомневаюсь.Исследователи всегда идут от простого к сложному.
Как вы можете заметить посадку LLRV на камушки я уже 40 лет жду.
Опаньки69> В-третьих, как течение газов вдоль поверхности влияет на аппарат? Вы, уважаемый оппонент, нам так и не объяснили. Просим.
Про интерференцию крыла и фюзеляжа, крыла и пилона, пилона и вздухозаборника и пр. я читал неоднократно. Но про интерференцию газовой струи с поверхностью хотелось бы почитать, что нибудь американское, исследованное специально для Лунного модуля или Сюрвейера. неужели вы ничего не сможете нам предложить?
Памятливый45>> Ещё нет посадки на неподготовленную поверхность , но уже начаты исследования взлёта.
Памятливый45>> Как я в вышеприведённом сообщении предположил на ровную поверхность вне проекции сопла уложены гнсколько бульников, которые изменяют картину течения газов вдоль поверхности ВПП. Кстати эту картину описали в сообщении о турбулёте процитированном Опаньки69.
Опаньки69> Вообще-то, это не "Нортроп Грумман", а Армадилло, это во-первых.
Кто заказывает в 21 -м веке музыку тот и танцует девушку. Аппарат вообще мог называться Пикселем. Ваше первое замечание -бессмысленно.
Опаньки69> Во-вторых, взлетала эта хреновина с ровной площадки, а на булыжники садилась, и уже потом наоборот. На ролике заснят второй полёт.
Ну так покажите первый взлёт. Он как и Вами показанного LLRV был с ровной поверхности. Ни сколечко не сомневаюсь.Исследователи всегда идут от простого к сложному.
Как вы можете заметить посадку LLRV на камушки я уже 40 лет жду.
Опаньки69> В-третьих, как течение газов вдоль поверхности влияет на аппарат? Вы, уважаемый оппонент, нам так и не объяснили. Просим.
Про интерференцию крыла и фюзеляжа, крыла и пилона, пилона и вздухозаборника и пр. я читал неоднократно. Но про интерференцию газовой струи с поверхностью хотелось бы почитать, что нибудь американское, исследованное специально для Лунного модуля или Сюрвейера. неужели вы ничего не сможете нам предложить?
Памятливый45>Но про интерференцию газовой струи с поверхностью хотелось бы почитать, что нибудь американское, исследованное специально для Лунного модуля или Сюрвейера. неужели вы ничего не сможете нам предложить?
Опологеты вообще полностью отрицают возможность возникновения оной, одни утверждают что струя в принципе отсутствует, другие что мол "скачки мешають" и пр... глубина и диапазон "знаний" опологетов поражает.
Опологеты вообще полностью отрицают возможность возникновения оной, одни утверждают что струя в принципе отсутствует, другие что мол "скачки мешають" и пр... глубина и диапазон "знаний" опологетов поражает.
"Остановите Землю — я сойду" (С) Лесли Брикасс, Энтони Ньюли
Jerard> Опологеты вообще полностью отрицают возможность возникновения оной, одни утверждают что струя в принципе отсутствует, другие что мол "скачки мешають" и пр... глубина и диапазон "знаний" опологетов поражает.
Продемонстрируйте нам ваши знания. Расскажите нам неграмотным про интерференцию газовых струй.
"Апологет (Apologist) — любой из христианских писателей, главным образом II—III веков, защищавших христианство от критики и, в свою очередь, критикующих греко-римскую культуру. Многие из их сочинений были адресованы римским императорам и часто напоминали по форме короткие служебные письма, составленные с целью защитить христианство от обвинений, выдвигаемых против него во II веке. Произведения апологетов не отражают полную картину раннего этапа христианства, так как они были написаны в ответ на конкретные обвинения их противников.
Среди греческих апологетов следует отметить Юстина Мученика, Татиана, Аристида, Аполлинара, Феофила, Теофина и Климента Александрийского. Латинскими апологетами II века являлись Минуций Феликс и Тертуллиан.
В современной культуре это слово обозначает также любого человека, кто убеждённо защищает то или иное действие или убеждение, последовательно отстаивая и пропагандируя его."
Продемонстрируйте нам ваши знания. Расскажите нам неграмотным про интерференцию газовых струй.
"Апологет (Apologist) — любой из христианских писателей, главным образом II—III веков, защищавших христианство от критики и, в свою очередь, критикующих греко-римскую культуру. Многие из их сочинений были адресованы римским императорам и часто напоминали по форме короткие служебные письма, составленные с целью защитить христианство от обвинений, выдвигаемых против него во II веке. Произведения апологетов не отражают полную картину раннего этапа христианства, так как они были написаны в ответ на конкретные обвинения их противников.
Среди греческих апологетов следует отметить Юстина Мученика, Татиана, Аристида, Аполлинара, Феофила, Теофина и Климента Александрийского. Латинскими апологетами II века являлись Минуций Феликс и Тертуллиан.
В современной культуре это слово обозначает также любого человека, кто убеждённо защищает то или иное действие или убеждение, последовательно отстаивая и пропагандируя его."
Не ошибается тот, кто ничего не делает.
Памятливый45> Кто заказывает в 21 -м веке музыку тот и танцует девушку. Аппарат вообще мог называться Пикселем. Ваше первое замечание -бессмысленно.
Армадилло - это не название аппарата, а название фирмы, которая его сделала. А "заказывает музыку" НАСА.
Памятливый45> Как вы можете заметить посадку LLRV на камушки я уже 40 лет жду.
И ещё будете ждать - не садился он "на камушки". Он для этого не был предназначен. Он создавался для отработки системы стабилизации реактивного аппарата с вертикальным взлётом и посадкой в полёте вблизи поверхности массивного тела (Земля, Луна и проч.), а также для отработки принципов управления и обучения пилотов. А посадку "на камушки" отрабатывали на Сервейерах.
Армадилло - это не название аппарата, а название фирмы, которая его сделала. А "заказывает музыку" НАСА.
Памятливый45> Как вы можете заметить посадку LLRV на камушки я уже 40 лет жду.
И ещё будете ждать - не садился он "на камушки". Он для этого не был предназначен. Он создавался для отработки системы стабилизации реактивного аппарата с вертикальным взлётом и посадкой в полёте вблизи поверхности массивного тела (Земля, Луна и проч.), а также для отработки принципов управления и обучения пилотов. А посадку "на камушки" отрабатывали на Сервейерах.
Не ошибается тот, кто ничего не делает.
Это сообщение редактировалось 17.11.2009 в 17:37
Jerard> Опологеты вообще полностью отрицают возможность возникновения оной, одни утверждают что струя в принципе отсутствует, другие что мол "скачки мешають" и пр...
Это где вы таких "опологетов" нашли, которые так утверждают? Тут таких точно нет. Тут опологеты утверждают то же самое не один год - воздействие струи на грунт есть, следы его заметны и они именно такие, какие и должны быть на Луне. Вы не согласны?
Jerard> глубина и диапазон "знаний" опологетов поражает.
Да ладно вам - это потому, что мы тупые. Но вы то - вы то не такой, вы то не опологет. Вот и расскажите нам тупым, почему воздействие струи на грунт неправильное, и какое оно должно быть, чтоб было как надо. Или слабо?
Это где вы таких "опологетов" нашли, которые так утверждают? Тут таких точно нет. Тут опологеты утверждают то же самое не один год - воздействие струи на грунт есть, следы его заметны и они именно такие, какие и должны быть на Луне. Вы не согласны?
Jerard> глубина и диапазон "знаний" опологетов поражает.
Да ладно вам - это потому, что мы тупые. Но вы то - вы то не такой, вы то не опологет. Вот и расскажите нам тупым, почему воздействие струи на грунт неправильное, и какое оно должно быть, чтоб было как надо. Или слабо?
Две вещи действительно бесконечны: Вселенная и человеческая глупость. Впрочем, насчет Вселенной у меня есть некоторые сомнения (c) А.Эйнштейн
Памятливый45> Про интерференцию крыла и фюзеляжа, крыла и пилона, пилона и вздухозаборника и пр. я читал неоднократно. Но про интерференцию газовой струи с поверхностью хотелось бы почитать, что нибудь американское, исследованное специально для Лунного модуля или Сюрвейера. неужели вы ничего не сможете нам предложить?
Конечно, не смогу, потому что крыло и фюзеляж, крыло и пилон, пилон и воздухозаборник - это пары близко расположенных элементов конструкции летательного аппарата, которые находятся в одном потоке воздуха. А вот газовая струя и поверхность к таковым не относятся. Начнём с того, что крыло, фюзеляж, пилон и воздухозаборник - это твёрдые тела, а реактивная струя - это газ, это во-первых. Во-вторых, крыло, фюзеляж, пилон и воздухозаборник - элементы конструкции, и их конструкторов очень интересуют их аэродинамические свойства, а вот аэродинамические свойства поверхности Земли или Луны никого из конструкторов не интересуют, ибо никто из них не собирался и никогда не собирается использовать эту поверхность в качестве элемента конструкции аэроплана.
Конечно, не смогу, потому что крыло и фюзеляж, крыло и пилон, пилон и воздухозаборник - это пары близко расположенных элементов конструкции летательного аппарата, которые находятся в одном потоке воздуха. А вот газовая струя и поверхность к таковым не относятся. Начнём с того, что крыло, фюзеляж, пилон и воздухозаборник - это твёрдые тела, а реактивная струя - это газ, это во-первых. Во-вторых, крыло, фюзеляж, пилон и воздухозаборник - элементы конструкции, и их конструкторов очень интересуют их аэродинамические свойства, а вот аэродинамические свойства поверхности Земли или Луны никого из конструкторов не интересуют, ибо никто из них не собирался и никогда не собирается использовать эту поверхность в качестве элемента конструкции аэроплана.
Не ошибается тот, кто ничего не делает.
Памятливый45> А поскольку «отражения струи от поверхности обратно вверх не происходит», то , по-мнению Опаньки69, поверхность поглощает весь газ, вылетевший из сопла?
Ещё раз процитирую результаты экспериментов с турболётом советских конструкторов.
"Результаты экспериментов показали работоспособность ТРД в необычной позиции. Оказалось, что выхлопная газовая струя растекается равномерно во все стороны тонкой веерообразной пеленой над ВПП от места ее удара, не поднимаясь вверх. Таким образом, двигатель работает в благоприятных для старта условиях."
http://vtol.boom.ru//limg.imgsmail.ru/r/speeddial.png [not image]
// vtol.boom.ru
Памятливый45> Вы пишите «достаточный зазор». Какой зазор ракетчиками считается достаточным?
Вначале это определялось с помощью специально поставленных экспериментов. Теперь же ракетчики накопили достаточный опыт, чтобы не изобретать велосипед, а пользуются учебниками и справочниками. Думаю, что сейчас такие вещи можно рассчитывать с помощью специальных таблиц или формул, или просто воспользоваться компьютерной моделью. Я не ракетчик, поэтому могу ошибаться, знающие люди меня поправят, если я не прав.
Памятливый45> С какой высоты "поверхности вообще нет" . Про экранопланы то хоть в мурзитке читали
Читал. "Экранный эффект — эффект резкого увеличения грузоподъёмности крыла при полёте вблизи поверхности (1-1,5 м). Экранный эффект — это та же воздушная подушка, только образуемая путём нагнетания воздуха не специальными устройствами, а динамически набегающим потоком воздуха." И где вы там на Луне крыло увидали? Я уже молчу о воздухе.
Памятливый45> Не можем. У ТРД и у ЖРД разные дроссельные характеристики.
Памятливый45> Разная приемистость. Разные гироскопические моменты.
Памятливый45> Разная картина распределения тяги между воздухозаборником и соплом.
Вообще-то, и у LLRV, и у LM стабилизацией в полёте управлял бортовой компьютер, а пилот задавал только направление движения. Так что навыки управления и там, и там были примерно одинаковые.
Памятливый45> Факт остаётся фактом турбулёты летают в нескольких странах уже на протяжении без малого 60 лет, а пилотируемые ракетолёты на Земле никогда свободно (без верёвочки) не летали.
Может, поэтому:
"ВРД — реактивный двигатель, развивающий тягу за счёт реактивной струи рабочего тела, истекающего из сопла двигателя. С этой точки зрения ВРД подобен ракетному двигателю (РД), но отличается от последнего тем, что большую часть рабочего тела он забирает из окружающей среды — атмосферы, в том числе и окислитель, необходимый для горения топлива. В качестве окислителя в ВРД используется кислород, содержащийся в воздухе. Благодаря этому ВРД обладает преимуществом в сравнении с ракетным двигателем при полётах в атмосфере: если летательный аппарат, оборудованный ракетным двигателем должен транспортировать как горючее, так и окислитель, масса которого больше массы горючего в 2-8 раз, в зависимости от вида горючего, то аппарат, оснащённый ВРД должен иметь на борту только запас горючего. Следовательно, при одной и той же массе топлива аппарат с ВРД энергетически в несколько раз более обеспечен, чем аппарат с ракетным двигателем, и на активном участке полёта может преодолеть в несколько раз большее расстояние (иногда — в десятки раз)."
Ещё раз процитирую результаты экспериментов с турболётом советских конструкторов.
"Результаты экспериментов показали работоспособность ТРД в необычной позиции. Оказалось, что выхлопная газовая струя растекается равномерно во все стороны тонкой веерообразной пеленой над ВПП от места ее удара, не поднимаясь вверх. Таким образом, двигатель работает в благоприятных для старта условиях."
http://vtol.boom.ru//limg.imgsmail.ru/r/speeddial.png [not image]
@MAIL.RU: почта, поиск в интернете, новости, работа, развлечения. Почта @Mail.Ru — бесплатная почта №1
Национальная почтовая служба @Mail.ru — лучшая бесплатная почта. Доступ к почте через POP/SMTP, веб- и wap-интерфейс. Также на портале: поиск в интернете, авто, новости, спорт, музыка, работа, знакомства, анекдоты, открытки, погода// vtol.boom.ru
Памятливый45> Вы пишите «достаточный зазор». Какой зазор ракетчиками считается достаточным?
Вначале это определялось с помощью специально поставленных экспериментов. Теперь же ракетчики накопили достаточный опыт, чтобы не изобретать велосипед, а пользуются учебниками и справочниками. Думаю, что сейчас такие вещи можно рассчитывать с помощью специальных таблиц или формул, или просто воспользоваться компьютерной моделью. Я не ракетчик, поэтому могу ошибаться, знающие люди меня поправят, если я не прав.
Памятливый45> С какой высоты "поверхности вообще нет" . Про экранопланы то хоть в мурзитке читали
Читал. "Экранный эффект — эффект резкого увеличения грузоподъёмности крыла при полёте вблизи поверхности (1-1,5 м). Экранный эффект — это та же воздушная подушка, только образуемая путём нагнетания воздуха не специальными устройствами, а динамически набегающим потоком воздуха." И где вы там на Луне крыло увидали? Я уже молчу о воздухе.
Памятливый45> Не можем. У ТРД и у ЖРД разные дроссельные характеристики.
Памятливый45> Разная приемистость. Разные гироскопические моменты.
Памятливый45> Разная картина распределения тяги между воздухозаборником и соплом.
Вообще-то, и у LLRV, и у LM стабилизацией в полёте управлял бортовой компьютер, а пилот задавал только направление движения. Так что навыки управления и там, и там были примерно одинаковые.
Памятливый45> Факт остаётся фактом турбулёты летают в нескольких странах уже на протяжении без малого 60 лет, а пилотируемые ракетолёты на Земле никогда свободно (без верёвочки) не летали.
Может, поэтому:
"ВРД — реактивный двигатель, развивающий тягу за счёт реактивной струи рабочего тела, истекающего из сопла двигателя. С этой точки зрения ВРД подобен ракетному двигателю (РД), но отличается от последнего тем, что большую часть рабочего тела он забирает из окружающей среды — атмосферы, в том числе и окислитель, необходимый для горения топлива. В качестве окислителя в ВРД используется кислород, содержащийся в воздухе. Благодаря этому ВРД обладает преимуществом в сравнении с ракетным двигателем при полётах в атмосфере: если летательный аппарат, оборудованный ракетным двигателем должен транспортировать как горючее, так и окислитель, масса которого больше массы горючего в 2-8 раз, в зависимости от вида горючего, то аппарат, оснащённый ВРД должен иметь на борту только запас горючего. Следовательно, при одной и той же массе топлива аппарат с ВРД энергетически в несколько раз более обеспечен, чем аппарат с ракетным двигателем, и на активном участке полёта может преодолеть в несколько раз большее расстояние (иногда — в десятки раз)."
Не ошибается тот, кто ничего не делает.
Это сообщение редактировалось 17.11.2009 в 18:52
Памятливый45>>> Конечно аппарат Нортроп Грумман взлетел в 21-м веке, а не в 20-м.
Памятливый45> Памятливый45>> Ещё нет посадки на неподготовленную поверхность , но уже начаты исследования взлёта.
Апполонгеты :Бла-бла-бла (не по теме)
Памятливый45> Ну так покажите первый взлёт. Он как и Вами показанного LLRV был с ровной поверхности. Ни сколечко не сомневаюсь.Исследователи всегда идут от простого к сложному.
Уважааемые участники форума!
Напоминаю, что Вас спрашивают про взлёт с неподготовленнной поверхности ракеты в 20-м веке.
Аппологеты отвечают на заданный в этой теме вопрос. Если чего не поняли в попросе, то переспросите, я Вам объясню, что такое взлёт, что таое 20-й век от Рождества Христова, что такое поверхность.
Свои же вопросы про воздушно-реактивные двигатели аппологеты задают в специально созданных ими разделах форума.
Незнание интерференции крыла и неподготовленной поверхности земли - экранный эффект они гасят в авиационном форуме, посвященном экранопланам (касается Опаньки69).
Памятливый45> Памятливый45>> Ещё нет посадки на неподготовленную поверхность , но уже начаты исследования взлёта.
Апполонгеты :Бла-бла-бла (не по теме)
Памятливый45> Ну так покажите первый взлёт. Он как и Вами показанного LLRV был с ровной поверхности. Ни сколечко не сомневаюсь.Исследователи всегда идут от простого к сложному.
Уважааемые участники форума!
Напоминаю, что Вас спрашивают про взлёт с неподготовленнной поверхности ракеты в 20-м веке.
Аппологеты отвечают на заданный в этой теме вопрос. Если чего не поняли в попросе, то переспросите, я Вам объясню, что такое взлёт, что таое 20-й век от Рождества Христова, что такое поверхность.
Свои же вопросы про воздушно-реактивные двигатели аппологеты задают в специально созданных ими разделах форума.
Незнание интерференции крыла и неподготовленной поверхности земли - экранный эффект они гасят в авиационном форуме, посвященном экранопланам (касается Опаньки69).
Уважаемый Памятливый45. А чего вы тут раскомандовались? Правила этого форума не запрещают нам беседовать в этой теме на интересующие нас вопросы, посвящённые высадкам американцев на Луну. А со своим уставом, как известно...
Что же касается ракет, то вам тут уже 132 раза сказали, что таких ракет не было. Что дальше? А не было их потому, что они никому не нужны. Как Неуловимый Джо, которыйнахсовсем никому не нужен.
Ракета, которую привозят в неподготовленное место, ставят на попа стабилизаторами в землю и запускают, причём после запуска на пусковой площадке ничего не остаётся, никому на Земле не нужна. Поэтому их и не существуют, если, конечно, не считать любительских ракет и ракет-фейерверков, которые втыкают палкой в снег на Новый Год и поджигают фитиль.
И к посадкам на Луну это не имеет никакого отношения. Почему? Уже объяснили выше. 19 мягких посадок было сделано. И это - факт, который вы не опровергнете при всём желании, хотя бы потому, что 8 из них были советскими. Отсутствие на Земле ракет, которые могли стартовать в тех условиях, о которых написано выше, никак не доказывает, что такую ракету невозможно было сделать в 60-е годы или, что "Сервейеры", "Аполлоны" и "Луны" на Луну не садились. Как же так, взлетающей ракеты нет, а "Луны" садились? Непорядок.
Что же касается ракет, то вам тут уже 132 раза сказали, что таких ракет не было. Что дальше? А не было их потому, что они никому не нужны. Как Неуловимый Джо, который
Ракета, которую привозят в неподготовленное место, ставят на попа стабилизаторами в землю и запускают, причём после запуска на пусковой площадке ничего не остаётся, никому на Земле не нужна. Поэтому их и не существуют, если, конечно, не считать любительских ракет и ракет-фейерверков, которые втыкают палкой в снег на Новый Год и поджигают фитиль.
И к посадкам на Луну это не имеет никакого отношения. Почему? Уже объяснили выше. 19 мягких посадок было сделано. И это - факт, который вы не опровергнете при всём желании, хотя бы потому, что 8 из них были советскими. Отсутствие на Земле ракет, которые могли стартовать в тех условиях, о которых написано выше, никак не доказывает, что такую ракету невозможно было сделать в 60-е годы или, что "Сервейеры", "Аполлоны" и "Луны" на Луну не садились. Как же так, взлетающей ракеты нет, а "Луны" садились? Непорядок.
Не ошибается тот, кто ничего не делает.
Это сообщение редактировалось 18.11.2009 в 00:08
Опаньки69> Уважаемый Памятливый45. А чего вы тут раскомандовались? Правила этого форума не запрещают нам беседовать в этой теме на интересующие нас вопросы, посвящённые высадкам американцев на Луну.
Да ладно, не обижайтесь на Тупого - он ведь тупой. Ему кажется, что тут обсужадают какие то особенности полета на Луну, либо технические аспекты программы Аполлон - а на самом то деле обсуждают только то, насколько он тупой. Ну и попутно демонстрируют (наглядно) из каких кадров рекрутируются ряды опровергателей. Если уж совсем начнет командовать, можно ему это тихонько напомнить
Да ладно, не обижайтесь на Тупого - он ведь тупой. Ему кажется, что тут обсужадают какие то особенности полета на Луну, либо технические аспекты программы Аполлон - а на самом то деле обсуждают только то, насколько он тупой. Ну и попутно демонстрируют (наглядно) из каких кадров рекрутируются ряды опровергателей. Если уж совсем начнет командовать, можно ему это тихонько напомнить
Две вещи действительно бесконечны: Вселенная и человеческая глупость. Впрочем, насчет Вселенной у меня есть некоторые сомнения (c) А.Эйнштейн
Реклама Google — средство выживания форумов :)
Памятливый45>> Как вы можете заметить посадку LLRV на камушки я уже 40 лет жду.
Опаньки69> И ещё будете ждать - не садился он "на камушки". Он для этого не был предназначен. Он создавался для отработки системы стабилизации реактивного аппарата с вертикальным взлётом и посадкой в полёте вблизи поверхности массивного тела (Земля, Луна и проч.), а также для отработки принципов управления и обучения пилотов.
Я вам привел цитату, что турбулёты, создавались для изучения динамики взлёта и посадки СВВП. Если у Вас есть дополнительная информация - приведите по крайней мере цитату.
А ещё лучше поищите девайс с ракетным двигателем, что взлетал с неподготовленной поверхности в 20-м веке.
Опаньки69> И ещё будете ждать - не садился он "на камушки". Он для этого не был предназначен. Он создавался для отработки системы стабилизации реактивного аппарата с вертикальным взлётом и посадкой в полёте вблизи поверхности массивного тела (Земля, Луна и проч.), а также для отработки принципов управления и обучения пилотов.
Я вам привел цитату, что турбулёты, создавались для изучения динамики взлёта и посадки СВВП. Если у Вас есть дополнительная информация - приведите по крайней мере цитату.
А ещё лучше поищите девайс с ракетным двигателем, что взлетал с неподготовленной поверхности в 20-м веке.
Copyright © Balancer 1997..2018
Создано 11.07.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 11.07.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}