-
![[image]](https://www.balancer.ru/cache/sites/com/ho/hostingkartinok/s5/uploads/images/2013/07/128x128-crop/7dafe16f2f1656e07a7ec1aae06ac8bb.jpg)
Фотограмметрия для кухарок
Геометрические измерения по фотоТеги:
 7-40
7-40

В общем, т. к. тема геометрических измерений по снимкам поднималась не однажды (и в связи с очередной активностью на Суперновуме) решил создать эту тему - не столько для новых разоблачений, сколько для обмена идеями.
Все мои идеи и вопросы порождены, естественно, тем, что у меня никакой фотограмметрической подготовки нет, а это, как можно судить, отрасль крупная, со своими задачами и методами; ну а не имея соответствующего образования, приходится сочинять что-то на коленке, так-сзать, из общих соображений.
Значицца, идея-вопрос № 0.
Порылся в сети - не нашел никаких попыток сделать 3-мерную модель мест высадок с помощью современных средств. Хотя идея лежит на поверхности. Ведь есть же профессиональный софт. Даже странно, что не удалось найти никаких отсылок на подобные реконструкции. Идея вот в чём. Нельзя ли восполнить отсутствие моделей? Есть ли где-то (полу)профессиональные - бесплатные, разумеется - пакеты, которым можно было бы за разумное время скормить несколько фотографий (таких, чтоб данные камеры - фокусное расстояние - задавались вручную), отметить на них соответствующие друг другу точки, и чтоб пакет сам уже "натянул" остальное фото на построенную в его нутрях 3-мерную модель? Мне удалось найти подобные пакеты, но они либо профессиональные и дорогие, либо требуют специальной съемки (стереопар), либо хотят данные камеры из EXIF, либо лепят очень грубо (судя по рекламным картинкам) и не известно, как там с возможностью промеров по моделям. А вот что-нибудь такое-этакое, чтоб все бесплатно (без 30-дневного периода, а навсегда!), и чтоб можно было как-нибудь не очень большим трудом... и чтоб можно было промерять... А?")
Все мои идеи и вопросы порождены, естественно, тем, что у меня никакой фотограмметрической подготовки нет, а это, как можно судить, отрасль крупная, со своими задачами и методами; ну а не имея соответствующего образования, приходится сочинять что-то на коленке, так-сзать, из общих соображений.
Значицца, идея-вопрос № 0.
Порылся в сети - не нашел никаких попыток сделать 3-мерную модель мест высадок с помощью современных средств. Хотя идея лежит на поверхности. Ведь есть же профессиональный софт. Даже странно, что не удалось найти никаких отсылок на подобные реконструкции. Идея вот в чём. Нельзя ли восполнить отсутствие моделей? Есть ли где-то (полу)профессиональные - бесплатные, разумеется - пакеты, которым можно было бы за разумное время скормить несколько фотографий (таких, чтоб данные камеры - фокусное расстояние - задавались вручную), отметить на них соответствующие друг другу точки, и чтоб пакет сам уже "натянул" остальное фото на построенную в его нутрях 3-мерную модель? Мне удалось найти подобные пакеты, но они либо профессиональные и дорогие, либо требуют специальной съемки (стереопар), либо хотят данные камеры из EXIF, либо лепят очень грубо (судя по рекламным картинкам) и не известно, как там с возможностью промеров по моделям. А вот что-нибудь такое-этакое, чтоб все бесплатно (без 30-дневного периода, а навсегда!), и чтоб можно было как-нибудь не очень большим трудом... и чтоб можно было промерять... А?


 инфо
инфо инструменты
инструменты
Задача-идея № 2.
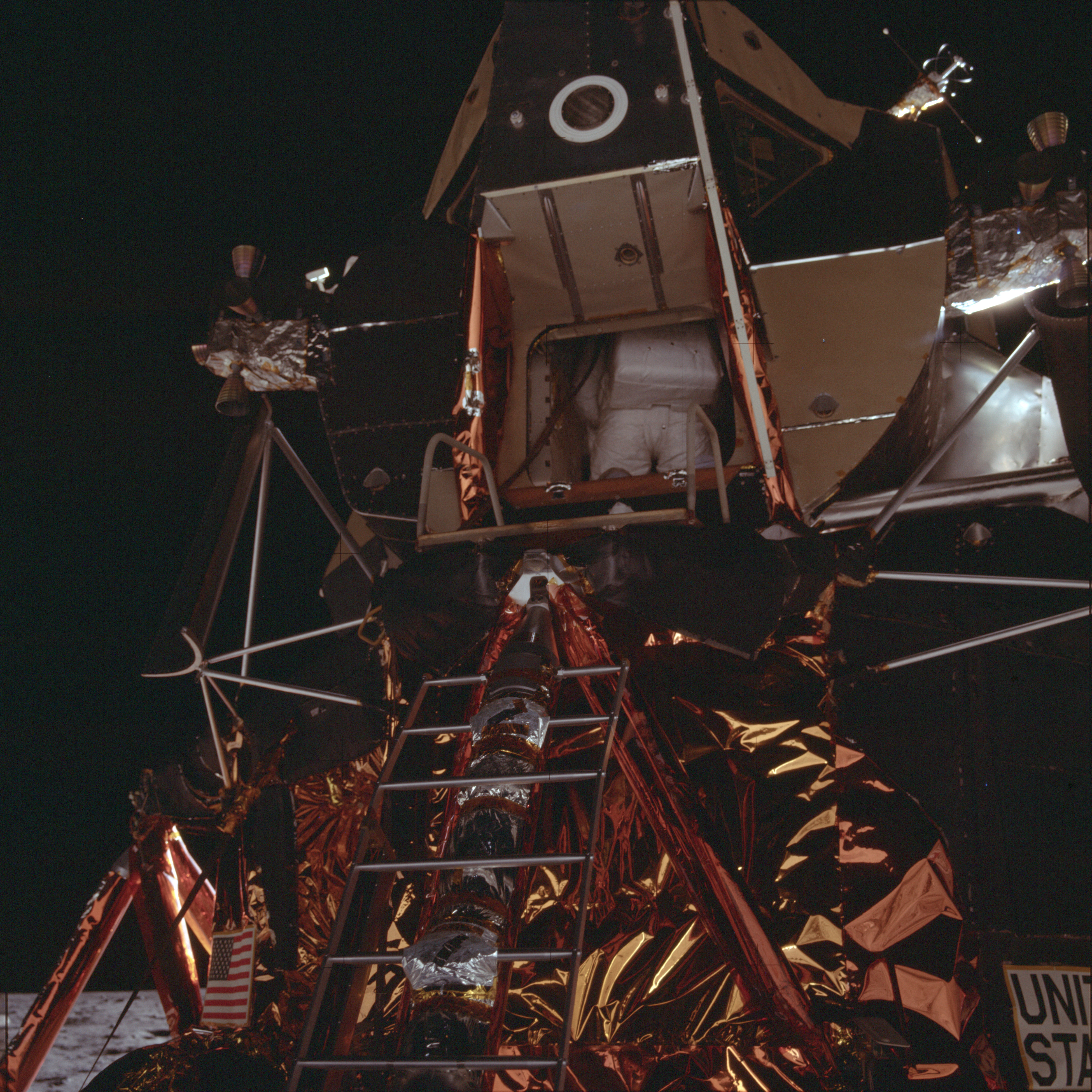
Может попробовать воспользоваться фототриангуляцией, или как? Вот здесь, например - apollo.josefsipek.net/Documents/LM_Structures/LM_equipment_sht1.jpg , apollo.josefsipek.net/Documents/LM_Structures/LM_equipment_sht2.jpg - есть очень детальный эскиз ЛМ. Размеров, к сожалению, нет, но их можно восстановить из какого-нибудь известного размера; например, из диаметра тарелки посадочной опоры, вроде, 36 дюймов.
Если теперь на каком-нибудь фото есть ЛМ, то можно на этом изображении ЛМ определить положение 3 точек, расстояния между которыми можно восстановить по эскизу (точки придется подобрать). Этот треугольник точек образует известный базис. Вместе с фотоаппаратом эти 4 точки образуют неправильный тетраэдр (фотоаппарат - его вершина, базисный треугольник - грань основания).
Далее по фото можно замерить расстояние между изображениями этих точек, и с помощью известных формул, исходя из фокусного расстояния, перейти к углам, под которыми видны стороны базисного треугольника. Это будут углы при вершине тетраэдра.
Собственно вопрос. Зная углы при вершине тетраэдра и противолежащие им ребра (стороны базиса), можно найти прочие 3 ребра тетраэдра - расстояния от камеры до соответствующих точек ЛМ. Это чисто математическая задача. Но мне сейчас просто лень выводить соответствующие формулы. Из первой же системы, что я набросал, сразу получилась теорема синусов для тетраэдра , но далее что-то энтузиазм угас - решать систему из нескольких уравнений. Может, где-то есть уже готовый ответ в виде формул? Как, зная 3 ребра тетраэдра при одной из граней и 3 противолежащие им угла при вершине, найти оставшиеся ребра? ...Если готового ответа нет, придется решать дальше... Зная формулы, можно находить положение камеры, сделавшей почти любой снимок с ЛМ: фототриангуляция позволит "отвязаться" от карт и прочая, по которым только сейчас и удается примерно определять координаты камеры при съемках.
...Дальнейший алгоритм понятен. Положение камеры можно уточнить, пользуясь разными тройками точек на ЛМ. Везде желательно искать погрешности одновременно с длинами и углами. Определив положение камеры, можно уже брать любую точку Р на том же снимке - ее координаты на снимке однозначно определяют направление луча, берущего начало от камеры. Затем операцию можно повторить на другом снимке, определив положение камеры. Если на этом другом снимке есть точка Р, то мы будем иметь два скрещивающихся луча, и положение точки Р будет однозначно определено.
В принципе, следуя этому алгоритму, по двум снимкам можно будет найти положение любой точки Р, содержащихся на обоих снимках. Главное - не забывать вычислять погрешность, чтобы ориентироваться, насколько точны вычисления и при возможности вовремя повышать их точность, подключая новые треугольники (когда на сцене будет некоторое новое количество точек, ЛМ уже не будет нужен для опорного базиса, можно будет пользоваться положением других найденных точек).
...В целом такой алгоритм представляется мне достаточно громоздким, но реализуемым. Вычисления по готовым формулам легко автоматизируются Экселем и т. п. Другое дело, что без знания алгоритмов оптимизации объем работы будет безусловно выше, а точность меньше, чем могла бы быть в профессиональном исполнении. Но таким образом хоть какие-то измерения сможет делать и кухарка...
Может попробовать воспользоваться фототриангуляцией, или как? Вот здесь, например - apollo.josefsipek.net/Documents/LM_Structures/LM_equipment_sht1.jpg , apollo.josefsipek.net/Documents/LM_Structures/LM_equipment_sht2.jpg - есть очень детальный эскиз ЛМ. Размеров, к сожалению, нет, но их можно восстановить из какого-нибудь известного размера; например, из диаметра тарелки посадочной опоры, вроде, 36 дюймов.
Если теперь на каком-нибудь фото есть ЛМ, то можно на этом изображении ЛМ определить положение 3 точек, расстояния между которыми можно восстановить по эскизу (точки придется подобрать). Этот треугольник точек образует известный базис. Вместе с фотоаппаратом эти 4 точки образуют неправильный тетраэдр (фотоаппарат - его вершина, базисный треугольник - грань основания).
Далее по фото можно замерить расстояние между изображениями этих точек, и с помощью известных формул, исходя из фокусного расстояния, перейти к углам, под которыми видны стороны базисного треугольника. Это будут углы при вершине тетраэдра.
Собственно вопрос. Зная углы при вершине тетраэдра и противолежащие им ребра (стороны базиса), можно найти прочие 3 ребра тетраэдра - расстояния от камеры до соответствующих точек ЛМ. Это чисто математическая задача. Но мне сейчас просто лень выводить соответствующие формулы. Из первой же системы, что я набросал, сразу получилась теорема синусов для тетраэдра
, но далее что-то энтузиазм угас - решать систему из нескольких уравнений. Может, где-то есть уже готовый ответ в виде формул? Как, зная 3 ребра тетраэдра при одной из граней и 3 противолежащие им угла при вершине, найти оставшиеся ребра? ...Если готового ответа нет, придется решать дальше... Зная формулы, можно находить положение камеры, сделавшей почти любой снимок с ЛМ: фототриангуляция позволит "отвязаться" от карт и прочая, по которым только сейчас и удается примерно определять координаты камеры при съемках....Дальнейший алгоритм понятен. Положение камеры можно уточнить, пользуясь разными тройками точек на ЛМ. Везде желательно искать погрешности одновременно с длинами и углами. Определив положение камеры, можно уже брать любую точку Р на том же снимке - ее координаты на снимке однозначно определяют направление луча, берущего начало от камеры. Затем операцию можно повторить на другом снимке, определив положение камеры. Если на этом другом снимке есть точка Р, то мы будем иметь два скрещивающихся луча, и положение точки Р будет однозначно определено.
В принципе, следуя этому алгоритму, по двум снимкам можно будет найти положение любой точки Р, содержащихся на обоих снимках. Главное - не забывать вычислять погрешность, чтобы ориентироваться, насколько точны вычисления и при возможности вовремя повышать их точность, подключая новые треугольники (когда на сцене будет некоторое новое количество точек, ЛМ уже не будет нужен для опорного базиса, можно будет пользоваться положением других найденных точек).
...В целом такой алгоритм представляется мне достаточно громоздким, но реализуемым. Вычисления по готовым формулам легко автоматизируются Экселем и т. п. Другое дело, что без знания алгоритмов оптимизации объем работы будет безусловно выше, а точность меньше, чем могла бы быть в профессиональном исполнении. Но таким образом хоть какие-то измерения сможет делать и кухарка...
Это сообщение редактировалось 24.01.2010 в 12:30
 3-62
3-62

7-40> Порылся в сети - не нашел никаких попыток сделать 3-мерную модель мест высадок с помощью современных средств. Хотя идея лежит на поверхности.
Вы, извините, бездушной машине хотите отдать на пожирание самое вкусное и интересное.
Как бы, есть 3ДМакс - там и объекты отрисовать можзно, и размещение, и "фотки" с разных ракурсов сделать можно. И все бесплатно и не на месяц.
Но считать "геометрию" придется ручками... Что и подкупает. Готов поучаствовать, как только выберусь из ГЦ РФ домой.
Вы, извините, бездушной машине хотите отдать на пожирание самое вкусное и интересное.
Как бы, есть 3ДМакс - там и объекты отрисовать можзно, и размещение, и "фотки" с разных ракурсов сделать можно. И все бесплатно и не на месяц.
Но считать "геометрию" придется ручками... Что и подкупает. Готов поучаствовать, как только выберусь из ГЦ РФ домой.
7-40>> Порылся в сети - не нашел никаких попыток сделать 3-мерную модель мест высадок с помощью современных средств. Хотя идея лежит на поверхности.
3-62> Вы, извините, бездушной машине хотите отдать на пожирание самое вкусное и интересное.
А что тут интересного? Пытать калькулятор или Эксель, считая стандартные вещи по громоздким, но стандартным формулам? Это же как раз та вещь, которая должна сравнительно легко алгоритмизироваться. Но если это делать на коленке, как я предложил, то при незнании оптимальных алгоритмов и методов оптимизации (каковые, безусловно, должны существовать, судя по толщине курсов фотограмметрии, и в которых я, например, ни в зуб ногой), так вот при незнании способов оптимизации ты обречен на нудное выполнение большой работы и страдания по выуживанию каждой точки. Погрешности-то тоже вычислять надо. Какие там будут частные производные?! Хорошо хоть, в сети есть считалка производных. Но все равно, вбивание этих функций в Эксель, а затем дебаггинг займет кучу времени. Можно, конечно, погрешности не вычислять, а измерять - промеряя одну точку несколько раз при разных ее приблизительных положениях, а затем находя среднее и дисперсию результатов - но это уже извращение...
В общем, если софт есть, то он рулит. Но где он, софт?
3-62> Как бы, есть 3ДМакс - там и объекты отрисовать можзно, и размещение, и "фотки" с разных ракурсов сделать можно. И все бесплатно и не на месяц.
Ну, потом нарисовать - это уже проще. 3ДМакс я совершенно не знаю, но даже программа построения 3-мерных графиков сойдет. Даже монстрик вроде Asymptote. Но если в 3ДМакс это проще - что ж, хорошо.
3-62> Но считать "геометрию" придется ручками...
Ыыыыы!!! 
3-62> Что и подкупает. Готов поучаствовать, как только выберусь из ГЦ РФ домой.
Да мне вот как раз участвовать в ручных расчетах не очень хочется. Хочется дело упростить. Но если что, то на птичьих правах, наверное, соберусь. Не в одиночку.
3-62> Вы, извините, бездушной машине хотите отдать на пожирание самое вкусное и интересное.
А что тут интересного? Пытать калькулятор или Эксель, считая стандартные вещи по громоздким, но стандартным формулам? Это же как раз та вещь, которая должна сравнительно легко алгоритмизироваться. Но если это делать на коленке, как я предложил, то при незнании оптимальных алгоритмов и методов оптимизации (каковые, безусловно, должны существовать, судя по толщине курсов фотограмметрии, и в которых я, например, ни в зуб ногой), так вот при незнании способов оптимизации ты обречен на нудное выполнение большой работы и страдания по выуживанию каждой точки. Погрешности-то тоже вычислять надо. Какие там будут частные производные?! Хорошо хоть, в сети есть считалка производных.
Но все равно, вбивание этих функций в Эксель, а затем дебаггинг займет кучу времени. Можно, конечно, погрешности не вычислять, а измерять - промеряя одну точку несколько раз при разных ее приблизительных положениях, а затем находя среднее и дисперсию результатов - но это уже извращение... В общем, если софт есть, то он рулит.
Но где он, софт? 3-62> Как бы, есть 3ДМакс - там и объекты отрисовать можзно, и размещение, и "фотки" с разных ракурсов сделать можно. И все бесплатно и не на месяц.
Ну, потом нарисовать - это уже проще. 3ДМакс я совершенно не знаю, но даже программа построения 3-мерных графиков сойдет. Даже монстрик вроде Asymptote. Но если в 3ДМакс это проще - что ж, хорошо.
3-62> Но считать "геометрию" придется ручками...
Ыыыыы!!!
3-62> Что и подкупает. Готов поучаствовать, как только выберусь из ГЦ РФ домой.
Да мне вот как раз участвовать в ручных расчетах не очень хочется. Хочется дело упростить.
Но если что, то на птичьих правах, наверное, соберусь. Не в одиночку.


А я так и не понял - как в PhotoModeler'е задать параметры фотоаппарата без калибровки А так вроде делает что надо. Но без параметров не работает
А так вроде делает что надо. Но без параметров не работает

7-40>>> Порылся в сети - не нашел никаких попыток сделать 3-мерную модель мест высадок с помощью современных средств. Хотя идея лежит на поверхности.
7-40> А что тут интересного? Пытать калькулятор или Эксель...
Хорошо хоть, в сети есть считалка производных.
Представьте себя капитаном Джеком воробьем и попробуйте пиратский "мапл". Он многое считает. В том числе и производные.
7-40> А что тут интересного? Пытать калькулятор или Эксель...
Хорошо хоть, в сети есть считалка производных.
Представьте себя капитаном Джеком воробьем
и попробуйте пиратский "мапл". Он многое считает. В том числе и производные.
3-62> Представьте себя капитаном Джеком воробьем и попробуйте пиратский "мапл". Он многое считает. В том числе и производные.
Да производные я и ручкой считаю. Но есть и он-лайн калькулятор: Derivative Calculator with Steps . Просто громоздко все это.
Но я еще не нашел формулы, как найти ребра тетраэдра при вершине по известным плоским углам при этой вершине и известным трем другим противолежащим ребрам. Впрочем, пока и не искал толком.
и попробуйте пиратский "мапл". Он многое считает. В том числе и производные.Да производные я и ручкой считаю.
Но есть и он-лайн калькулятор: Derivative Calculator with Steps . Просто громоздко все это. Но я еще не нашел формулы, как найти ребра тетраэдра при вершине по известным плоским углам при этой вершине и известным трем другим противолежащим ребрам. Впрочем, пока и не искал толком.
an_private> А я так и не понял - как в PhotoModeler'е задать параметры фотоаппарата без калибровки А так вроде делает что надо. Но без параметров не работает
По-моему, в нем как раз калибровка не нужна (а где Вы прочли про калибровку?) Во всяком случае, в ознакомительном флеш-ролике про обязательную калибровку не говорится. Но эта штука стоит почти 1000 баксов. Можно, конечно, где-нибудь найти взломанную версию, но я зарекся ходить по пиратским сайтам. В общем, если у кого-нибудь эта штука есть, то ей можно было бы воспользоваться, ИМХО.
Вообще калибровка нужна для случая, когда дисторсии играют роль. Если дисторсиями можно пренебречь, то в калибровке, по сути, нужды нет: фокусное расстояние - единственный необходимый для расчетов внутренний параметр. Но некоторые простые пакеты, доступные в сети, требуют либо калибровки, либо EXIF, либо даже съемки предметов на фоне заранее разлинованного бумажного шаблона (шаблон прилагается ). И нет гарантии, что такие простые пакеты дают возможность хотя бы грубой оценки погрешностей и возможность промеров. А может, я плохо искал...
А так вроде делает что надо. Но без параметров не работает По-моему, в нем как раз калибровка не нужна (а где Вы прочли про калибровку?) Во всяком случае, в ознакомительном флеш-ролике про обязательную калибровку не говорится. Но эта штука стоит почти 1000 баксов.
Можно, конечно, где-нибудь найти взломанную версию, но я зарекся ходить по пиратским сайтам. В общем, если у кого-нибудь эта штука есть, то ей можно было бы воспользоваться, ИМХО.Вообще калибровка нужна для случая, когда дисторсии играют роль. Если дисторсиями можно пренебречь, то в калибровке, по сути, нужды нет: фокусное расстояние - единственный необходимый для расчетов внутренний параметр. Но некоторые простые пакеты, доступные в сети, требуют либо калибровки, либо EXIF, либо даже съемки предметов на фоне заранее разлинованного бумажного шаблона (шаблон прилагается
). И нет гарантии, что такие простые пакеты дают возможность хотя бы грубой оценки погрешностей и возможность промеров. А может, я плохо искал...
7-40> Да производные я и ручкой считаю. Но есть и он-лайн калькулятор:
Попробуйте мапл - рекомендую. Он всяко лучше "онлайн калькулятора".
7-40> Но я еще не нашел формулы, как найти ребра тетраэдра...
Бросьте в меня рисунок задачи. Чтобы мы говорили об одном и том же. Повспоминаю на досуге геометрию.")
Но есть и он-лайн калькулятор: Попробуйте мапл - рекомендую. Он всяко лучше "онлайн калькулятора".
7-40> Но я еще не нашел формулы, как найти ребра тетраэдра...
Бросьте в меня рисунок задачи. Чтобы мы говорили об одном и том же. Повспоминаю на досуге геометрию.
7-40> По-моему, в нем как раз калибровка не нужна (а где Вы прочли про калибровку?)
Я не прочел, это из опыта - файл калибровки камеры, это первое, что требуется при создании проекта.
7-40>В общем, если у кого-нибудь эта штука есть, то ей можно было бы воспользоваться, ИМХО.
Есть, есть. Я же говорил, что уже игрался.
7-40> Вообще калибровка нужна для случая, когда дисторсии играют роль.
Это понятно, но создать фейковый файл калибровки и ручками задать параметры камеры и объектива у меня не получилось. Соответственно и считать он отказывается.
Я не прочел, это из опыта - файл калибровки камеры, это первое, что требуется при создании проекта.
7-40>В общем, если у кого-нибудь эта штука есть, то ей можно было бы воспользоваться, ИМХО.
Есть, есть. Я же говорил, что уже игрался.
7-40> Вообще калибровка нужна для случая, когда дисторсии играют роль.
Это понятно, но создать фейковый файл калибровки и ручками задать параметры камеры и объектива у меня не получилось. Соответственно и считать он отказывается.
7-40>> Да производные я и ручкой считаю. Но есть и он-лайн калькулятор:
3-62> Попробуйте мапл - рекомендую. Он всяко лучше "онлайн калькулятора".
Для этого мне придется учить мапл. Наверное, ради производных не стОит.
7-40>> Но я еще не нашел формулы, как найти ребра тетраэдра...
3-62> Бросьте в меня рисунок задачи. Чтобы мы говорили об одном и том же. Повспоминаю на досуге геометрию.
Дык я уже описал. Есть неправильный тетраэдр: все ребра произвольны. Мы знаем длину трех ребер при одной грани. Мы знаем три плоских угла, противолежащих этим ребрам (соответственно все эти три угла - углы при вершине, противолежащей той грани, ребра при которой мы знаем; это три угла трехгранника). Задача: найти три остальных ребра - то есть найти три ребра, идущих от этой вершине к вершинам грани, ребра при которой мы знаем.
Не слишком путано? Если конспективно. Дано: произвольный неправильный тетраэдр. Шесть известных: три ребра и три противолежащих им плоских угла. Найти: три остальных ребра.
У меня геометрического чутья нет, все решаю алгеброй. Тут, если алгеброй делать, то, похоже, систему из трех квадратных уравнений решать придется (теорема косинусов для каждой из трех граней при вершине).
Но есть и он-лайн калькулятор: 3-62> Попробуйте мапл - рекомендую. Он всяко лучше "онлайн калькулятора".
Для этого мне придется учить мапл. Наверное, ради производных не стОит.
7-40>> Но я еще не нашел формулы, как найти ребра тетраэдра...
3-62> Бросьте в меня рисунок задачи. Чтобы мы говорили об одном и том же. Повспоминаю на досуге геометрию.
Дык я уже описал. Есть неправильный тетраэдр: все ребра произвольны. Мы знаем длину трех ребер при одной грани. Мы знаем три плоских угла, противолежащих этим ребрам (соответственно все эти три угла - углы при вершине, противолежащей той грани, ребра при которой мы знаем; это три угла трехгранника). Задача: найти три остальных ребра - то есть найти три ребра, идущих от этой вершине к вершинам грани, ребра при которой мы знаем.
Не слишком путано?
Если конспективно. Дано: произвольный неправильный тетраэдр. Шесть известных: три ребра и три противолежащих им плоских угла. Найти: три остальных ребра.У меня геометрического чутья нет, все решаю алгеброй. Тут, если алгеброй делать, то, похоже, систему из трех квадратных уравнений решать придется (теорема косинусов для каждой из трех граней при вершине).
7-40>>В общем, если у кого-нибудь эта штука есть, то ей можно было бы воспользоваться, ИМХО.
an_private> Есть, есть. Я же говорил, что уже игрался.
Здорово. Где б раздобыть бесплатно? Или Вы платили?
7-40>> Вообще калибровка нужна для случая, когда дисторсии играют роль.
an_private> Это понятно, но создать фейковый файл калибровки и ручками задать параметры камеры и объектива у меня не получилось. Соответственно и считать он отказывается.
То есть он требует калибровки, так? А как выглядит процесс калибровки? Пробовали Вы эту штуку со своим собственным фотиком - откалибровать, а потом снять и обработать какую-нибудь простую сцену?
Может быть, реально подменить файл калибровки? То есть выполнить калибровку любого более-менее приличного фотика (зеркалки с трансфокатором с не очень большими дисторсиями), выставив фокусное расстояние так, чтоб ЭФР соответствовало хасселевскому - а затем использовать полученный файл в качестве калибровочного для хасселевских снимков?
an_private> Есть, есть. Я же говорил, что уже игрался.
Здорово. Где б раздобыть бесплатно?
Или Вы платили? 7-40>> Вообще калибровка нужна для случая, когда дисторсии играют роль.
an_private> Это понятно, но создать фейковый файл калибровки и ручками задать параметры камеры и объектива у меня не получилось. Соответственно и считать он отказывается.
То есть он требует калибровки, так? А как выглядит процесс калибровки? Пробовали Вы эту штуку со своим собственным фотиком - откалибровать, а потом снять и обработать какую-нибудь простую сцену?
Может быть, реально подменить файл калибровки? То есть выполнить калибровку любого более-менее приличного фотика (зеркалки с трансфокатором с не очень большими дисторсиями), выставив фокусное расстояние так, чтоб ЭФР соответствовало хасселевскому - а затем использовать полученный файл в качестве калибровочного для хасселевских снимков?
7-40> Здорово. Где б раздобыть бесплатно? Или Вы платили?
на torrents.ru, вестимо
7-40> То есть он требует калибровки, так? А как выглядит процесс калибровки?
Не, не пробовал. Там надо объект отснимать со всех сторон и потом по серии откалибровать.
7-40> Может быть, реально подменить файл калибровки?
Возможно. У меня на это энтузиазма не хватило
Или Вы платили? на torrents.ru, вестимо
7-40> То есть он требует калибровки, так? А как выглядит процесс калибровки?
Не, не пробовал. Там надо объект отснимать со всех сторон и потом по серии откалибровать.
7-40> Может быть, реально подменить файл калибровки?
Возможно. У меня на это энтузиазма не хватило

7-40>> Может быть, реально подменить файл калибровки?
an_private> Возможно. У меня на это энтузиазма не хватило
Есть альтернатива - ImageModeler ( Autodesk - Autodesk ImageModeler ). Не без глюков, но производит впечатление работоспособного продукта.
Калибровки в обязательном порядке не требует. На torrents.ru - есть.
Из бесплатных (сам не пробовал) полезные для решения задачи функции имхо должны быть в подобных библиотеках:
EPIPOLAR GEOMETRY TOOLBOX - The Epipolar Geometry Toolbox (EGT) - библиотека для Matlab;
Intel OpenCV - OpenCV - Wikipedia, the free encyclopedia - библиотека для C .
an_private> Возможно. У меня на это энтузиазма не хватило
Есть альтернатива - ImageModeler ( Autodesk - Autodesk ImageModeler ). Не без глюков, но производит впечатление работоспособного продукта.
Калибровки в обязательном порядке не требует. На torrents.ru - есть.
Из бесплатных (сам не пробовал) полезные для решения задачи функции имхо должны быть в подобных библиотеках:
EPIPOLAR GEOMETRY TOOLBOX - The Epipolar Geometry Toolbox (EGT) - библиотека для Matlab;
Intel OpenCV - OpenCV - Wikipedia, the free encyclopedia - библиотека для C .
Это сообщение редактировалось 24.01.2010 в 21:08
N.A.> Есть альтернатива - ImageModeler ( N.A.> Калибровки в обязательном порядке не требует. На torrents.ru - есть.
Тоже стоит. Но с ним вообще не понял как работать (да и времени разбираться особо не было). Главная проблема - требуется прилично время на то, чтобы разобраться как это всё работает. А времени нету
Тоже стоит. Но с ним вообще не понял как работать (да и времени разбираться особо не было). Главная проблема - требуется прилично время на то, чтобы разобраться как это всё работает. А времени нету
Выкладываю файл .xls для дебаггинга: http://www.aai.ee/~vladislav/photogrammetry.xls
Таблица считает угловое расстояние между двумя точками на снимке. Вводимые параметры - синие: координаты X, Y (промеряются фотошопом) центрального креста, расстояние в пикселях между крестами, координаты Х, Y двух точек. Все - вместе с погрешностями (погрешности ставятся в поле рядом с самим значением). Погрешности можно брать по снимку навскидку, для расстояний между крестами - дисперсией по нескольким измерениям.
Все, что не жирное, не синее и не красное - промежуточные расчеты. В них могут быть ошибки, ошибки можно исправлять. Но данные туда вводить не надо.
В результате в красном поле будет вычислен плоский угол между лучами от камеры к указанным точкам. Рядом с ним - погрешность. Погрешности угла между точками на снимке и искомого угла считаются НЕ через производную, а численным определением диапазона. Сделано для того, чтоб обойти нефизичные значения погрешностей при косинусах, близких к 1. Погрешности через производную стоят справа от соответствующих углов.
Дебаггинг был минимальный, кто видит баги и хочет исправить - вэлком.
Таблица считает угловое расстояние между двумя точками на снимке. Вводимые параметры - синие: координаты X, Y (промеряются фотошопом) центрального креста, расстояние в пикселях между крестами, координаты Х, Y двух точек. Все - вместе с погрешностями (погрешности ставятся в поле рядом с самим значением). Погрешности можно брать по снимку навскидку, для расстояний между крестами - дисперсией по нескольким измерениям.
Все, что не жирное, не синее и не красное - промежуточные расчеты. В них могут быть ошибки, ошибки можно исправлять. Но данные туда вводить не надо.
В результате в красном поле будет вычислен плоский угол между лучами от камеры к указанным точкам. Рядом с ним - погрешность. Погрешности угла между точками на снимке и искомого угла считаются НЕ через производную, а численным определением диапазона. Сделано для того, чтоб обойти нефизичные значения погрешностей при косинусах, близких к 1. Погрешности через производную стоят справа от соответствующих углов.
Дебаггинг был минимальный, кто видит баги и хочет исправить - вэлком.
N.A.>> Есть альтернатива - ImageModeler ( N.A.> Калибровки в обязательном порядке an_private> Тоже стоит. Но с ним вообще не понял как работать (да и времени
Мне в свое время удалось немного поковырять и PhotoModeler и ImageModeler. Первый - не понравился вовсе, второй - на первый взгляд не так плох. Для него есть несколько тьюториалов (можно скачать отдельно +ставятся вместе с пакетом); я бегло ознакомился с самым простым - восстановление 3D "сундука" по его фото - мне этого хватило.
Если интересно, могу запостить здесь краткое "руководство по эксплуатации" объемом ~ в 10..15 строк.
7-40> Выкладываю файл .xls для дебаггинга: http://www.aai.ee/~vladislav/photogrammetry.xls
7-40> Дебаггинг был минимальный, кто видит баги и хочет исправить - вэлком.
Проверил пару углов по рассчитанным ранее в подобной xls-форме - результаты с точностью до погрешности совпали.
Кстати, есть еще практически важный случай - измерение истинных горизонтальных углов; соображения можно посмотреть здесь - http://ntrs.nasa.gov/archive/nasa/.../19700024713_1970024713.pdf .
Мне в свое время удалось немного поковырять и PhotoModeler и ImageModeler. Первый - не понравился вовсе, второй - на первый взгляд не так плох. Для него есть несколько тьюториалов (можно скачать отдельно +ставятся вместе с пакетом); я бегло ознакомился с самым простым - восстановление 3D "сундука" по его фото - мне этого хватило.
Если интересно, могу запостить здесь краткое "руководство по эксплуатации" объемом ~ в 10..15 строк.
7-40> Выкладываю файл .xls для дебаггинга: http://www.aai.ee/~vladislav/photogrammetry.xls
7-40> Дебаггинг был минимальный, кто видит баги и хочет исправить - вэлком.
Проверил пару углов по рассчитанным ранее в подобной xls-форме - результаты с точностью до погрешности совпали.
Кстати, есть еще практически важный случай - измерение истинных горизонтальных углов; соображения можно посмотреть здесь - http://ntrs.nasa.gov/archive/nasa/.../19700024713_1970024713.pdf .
Так, решение задачи с тетраэдром вроде бы есть... Очень, очень громоздкое аналитическое выражение. Теперь это реализовать и проверить осталось. С подсчетом шести частных производных для оценки погрешности... 
Теперь это реализовать и проверить осталось. С подсчетом шести частных производных для оценки погрешности...
7-40> Так, решение задачи с тетраэдром вроде бы есть... Очень, очень громоздкое аналитическое выражение. Теперь это реализовать и проверить осталось. С подсчетом шести частных производных для оценки погрешности...
Могу поработать тестером.
Теперь это реализовать и проверить осталось. С подсчетом шести частных производных для оценки погрешности... Могу поработать тестером.
Это сообщение редактировалось 30.01.2010 в 12:22
7-40> Так, решение задачи с тетраэдром вроде бы есть...
Посмешишь - людей насмешишь. Решения нет и пока не предвидится.
Посмешишь - людей насмешишь.
Решения нет и пока не предвидится.
7-40>> Так, решение задачи с тетраэдром вроде бы есть...
7-40> Посмешишь - людей насмешишь. Решения нет и пока не предвидится.
В ImageModeler ~ за 15 минут можно сваять такую штуку по паре кадров:

Софт прост, как 3 копейки: грузишь пару (или более) пересекающихся кадров, задаешь их параметры (главную точку, фокусное, физический размер кадра и параметры дисторсии) и указываешь на них одинаковые точки; если количество оных достаточно и взаимное расположение камер позволяет - он выполняет калибровку, и определяет 3D координаты камер и точек (физические размеры объектов на фото знать вообще говоря не надо). По откалиброванным снимкам уже можно выполнять измерения расстояний, углов, натягивать текстуры и/или экспортировать точки сцены во всякие автокады и 3Dмаксы. ИМХО - то, что доктор прописал.
Но, думаю, если есть желание сделать все своими руками, имеет смысл обратиться к литературе, ибо (имхо) все уже придумано и выведено до нас :
1. Multiple View Geometry in Computer Vision


В приложении - примеры для MatLab
2. Learning OpenCV. Computer Vision with the OpenCV Library
Книга к библиотеке для C, по теме - Глава 12 (Chapter 12 Projection and 3D Vision ). Где скачивал - не помню, ск. всего через торренты; в гугле находится без проблем.
3. И.С.Грузман, В.С. Киричук, В.П. Косых, Г.И. Перетягин
ЦИФРОВАЯ ОБРАБОТКА ИЗОБРАЖЕНИЙ В ИНФОРМАЦИОННЫХ СИСТЕМАХ

На русском. Главы 5 и 6 - то, что нужно.
Тема интересная, но в теорию сам не вникал.
7-40> Посмешишь - людей насмешишь.
Решения нет и пока не предвидится. В ImageModeler ~ за 15 минут можно сваять такую штуку по паре кадров:

Софт прост, как 3 копейки: грузишь пару (или более) пересекающихся кадров, задаешь их параметры (главную точку, фокусное, физический размер кадра и параметры дисторсии) и указываешь на них одинаковые точки; если количество оных достаточно и взаимное расположение камер позволяет - он выполняет калибровку, и определяет 3D координаты камер и точек (физические размеры объектов на фото знать вообще говоря не надо). По откалиброванным снимкам уже можно выполнять измерения расстояний, углов, натягивать текстуры и/или экспортировать точки сцены во всякие автокады и 3Dмаксы. ИМХО - то, что доктор прописал.
Но, думаю, если есть желание сделать все своими руками, имеет смысл обратиться к литературе, ибо (имхо) все уже придумано и выведено до нас
:1. Multiple View Geometry in Computer Vision
Multiple View Geometry in Computer VisionSecond Edition
Cookies This website uses Google Analytics to help us improve the website content. This requires the use of standard Google Analytics cookies, as well as a cookie to record your response to this confirmation request. If this is OK with you, please click 'Accept cookies', otherwise you will see this notice on every page. For more information, please click here. // www.robots.ox.ac.uk
В приложении - примеры для MatLab
2. Learning OpenCV. Computer Vision with the OpenCV Library
Книга к библиотеке для C, по теме - Глава 12 (Chapter 12 Projection and 3D Vision ). Где скачивал - не помню, ск. всего через торренты; в гугле находится без проблем.
3. И.С.Грузман, В.С. Киричук, В.П. Косых, Г.И. Перетягин
ЦИФРОВАЯ ОБРАБОТКА ИЗОБРАЖЕНИЙ В ИНФОРМАЦИОННЫХ СИСТЕМАХ
х.я.цПСГЛЮМ, б.я. йХПХВСЙ, б.о. йНЯШУ, ц.х. оЕПЕРЪЦХМ, ю.ю.яОЕЙРНП жхтпнбюъ напюанрйю хгнапюфемхи б хмтнплюжхнммшу яхярелюу
рХРСКЭМШИ КХЯР, НЦКЮБКЕМХЕ, ББЕДЕМХЕ дхяйперхгюжхъ х йбюмрнбюмхе меопепшбмшу хгнапюфемхи сксвьемхе бхгсюкэмнцн йювеярбю хгнапюфемхи осрел онщкелемрмнцн опенапюгнбюмхъ тхкэрпюжхъ хгнапюфемхи бняярюмнбкемхе хгнапюфемхи ценлерпхвеяйхе опенапюгнбюмхъ х опхбъгйю хгнапюфемхи тнрнцпюллерпхъ х ярепенбхдемхе гюйкчвемхе. кХРЕПЮРСПЮ // dsp-book.narod.ruНа русском. Главы 5 и 6 - то, что нужно.
Тема интересная, но в теорию сам не вникал.
N.A.> Софт прост, как 3 копейки: грузишь пару (или более) пересекающихся кадров, задаешь их параметры
Ну так ведь это то, что нужно! Плевать на строгость, если взять много реперных точек, то сцена должна быть построена достаточно точно благодаря количеству реперов.
...Вот нельзя ли взять и построить по нескольким снимкам 3-мерную сцену с ЛМ и вокруг него для А-11?
N.A.> ИМХО - то, что доктор прописал.
Именно!
N.A.> Но, думаю, если есть желание сделать все своими руками, имеет смысл обратиться к литературе, ибо (имхо) все уже придумано и выведено до нас
Эх, желание-то есть, но нельзя объять необъятное. Если не собираешься стать специалистом в данном деле, то рыть так глубоко имеет смысл лишь при наличии горячего неугасающего интереса в вопросу. У меня, честно говоря, такого интереса нет. Так что или софтом, или каким-нибудь простым кухонным методом.
Ну так ведь это то, что нужно! Плевать на строгость, если взять много реперных точек, то сцена должна быть построена достаточно точно благодаря количеству реперов.
...Вот нельзя ли взять и построить по нескольким снимкам 3-мерную сцену с ЛМ и вокруг него для А-11?
N.A.> ИМХО - то, что доктор прописал.
Именно!
N.A.> Но, думаю, если есть желание сделать все своими руками, имеет смысл обратиться к литературе, ибо (имхо) все уже придумано и выведено до нас
Эх, желание-то есть, но нельзя объять необъятное. Если не собираешься стать специалистом в данном деле, то рыть так глубоко имеет смысл лишь при наличии горячего неугасающего интереса в вопросу. У меня, честно говоря, такого интереса нет.
Так что или софтом, или каким-нибудь простым кухонным методом.
7-40> Ну так ведь это то, что нужно! Плевать на строгость, если взять много реперных точек, то сцена должна быть построена достаточно точно благодаря количеству реперов.
7-40> ...Вот нельзя ли взять и построить по нескольким снимкам 3-мерную сцену с ЛМ и вокруг него для А-11?
"Нас в колхоз нельзя - мы делать ничего не умеем. Мы - только руководить умеем".
А если серьезно - для решения конкретной задачи лучше научиться самому. Благо софт несложен.
Я качал отсюда: Ссылка запрещена по требованию [показать]
(ворованный, но рабочий).
Чтобы не было особой эйфории:
1. интерфейс своеобразный, есть некоторое кол-во глюков;
2. процесс выбора системы координат мне откровенно не понравился;
3. как следствие п.2 - интерпретация результатов имхо затруднительна, +лучше для этого использовать к-л 3D-смотрелку;
4. с погрешностями до конца неясно, иногда наблюдается "болтанка" решения +лучше все-таки знать к-л референсный размер.
Если не пугает:
1. Дистрибутив с таблеткой (~78 Мбайт) - Файлы@Mail.Ru: Ошибка [404] (скачать до 4.02.2010г.)
2. Пример файла готового проекта (.rzi) и файлов экспорта сцены (Автокад и Майя) - Файлы@Mail.Ru: Ошибка [404] (скачать до 4.02.2010г.)
К этому примеру понадобятся снимки http://www.lpi.usra.edu/resources/apollo/images/print/AS11/40/5862.jpg и http://www.lpi.usra.edu/resources/apollo/images/print/AS11/40/5863.jpg , их надо загрузить самостоятельно и поместить в папку с файлом проекта.
Результат:

Будут вопросы - чем смогу помогу.
7-40> ...Вот нельзя ли взять и построить по нескольким снимкам 3-мерную сцену с ЛМ и вокруг него для А-11?
"Нас в колхоз нельзя - мы делать ничего не умеем. Мы - только руководить умеем".
А если серьезно - для решения конкретной задачи лучше научиться самому. Благо софт несложен.
Я качал отсюда: Ссылка запрещена по требованию [показать]
(ворованный, но рабочий).
Чтобы не было особой эйфории:
1. интерфейс своеобразный, есть некоторое кол-во глюков;
2. процесс выбора системы координат мне откровенно не понравился;
3. как следствие п.2 - интерпретация результатов имхо затруднительна, +лучше для этого использовать к-л 3D-смотрелку;
4. с погрешностями до конца неясно, иногда наблюдается "болтанка" решения +лучше все-таки знать к-л референсный размер.
Если не пугает:
1. Дистрибутив с таблеткой (~78 Мбайт) - Файлы@Mail.Ru: Ошибка [404] (скачать до 4.02.2010г.)
2. Пример файла готового проекта (.rzi) и файлов экспорта сцены (Автокад и Майя) - Файлы@Mail.Ru: Ошибка [404] (скачать до 4.02.2010г.)
К этому примеру понадобятся снимки http://www.lpi.usra.edu/resources/apollo/images/print/AS11/40/5862.jpg и http://www.lpi.usra.edu/resources/apollo/images/print/AS11/40/5863.jpg , их надо загрузить самостоятельно и поместить в папку с файлом проекта.
Результат:

Будут вопросы - чем смогу помогу.
Это сообщение редактировалось 30.01.2010 в 16:23
Спасибо! Эх, не люблю я ворованный софт... Успокаиваю свою совесть только тем, что все равно бы не купил за запрашиваемую сумму, а значит, ущерба авторам вроде как и не нанес. И коммерческую выгоду извлекать не буду. Долларов за 50 купил бы, дороже инвестировать все равно не стал бы.
Долларов за 50 купил бы, дороже инвестировать все равно не стал бы.
Copyright © Balancer 1997..2024
Создано 23.01.2010
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 23.01.2010
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}