 shadowjack
shadowjack
 инфо
инфо инструменты
инструменты Non-conformist
Non-conformist

 Xan
Xan

 a_centaurus
a_centaurus


 GOGI
GOGI
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/w/w/www.gwiz-partners.com/assets/images/128x128-crop/remove_before.jpg)
Стабилизация Активная - часть II
Теги:

shadowjack
втянувшийся
shadowjack>> Рекомендую
Ckona> На следующей неделе закажу. Без применения не останется.
Ckona> Но:
Ckona> если у Нон-Конформиста удастся "стрельнуть" датчик - как его протокол (I2C и еще какой-то) подать на эту плату ?
А вот чего нашел:
На Спаркфане есть готовая платка с нашим гироскопом, которая и используется в примере. Хотя такую и самому сделать несложно.
Итого 2 готовых платы + 4 проводка. Исходник по ссылке.
Ckona> На следующей неделе закажу. Без применения не останется.
Ckona> Но:
Ckona> если у Нон-Конформиста удастся "стрельнуть" датчик - как его протокол (I2C и еще какой-то) подать на эту плату ?
А вот чего нашел:
На Спаркфане есть готовая платка с нашим гироскопом, которая и используется в примере. Хотя такую и самому сделать несложно.
Итого 2 готовых платы + 4 проводка. Исходник по ссылке.



Так что, разводить вам Pololu L3G4200D ? Сейчас своей материнкой занимаюсь, но могу переключиться для разнообразия.
Я развожу, травлю, сшиваю слои, паяю сабж и всю обвязку, гребёнки, и передаю в дар Ckona, в качестве попытки сказать "спасибо" за кардан. Срок - две недели. А может и меньше. Зато бесплатно. ))
Если согласны, прошу указать габариты и расположение разъёмов, чтобы потом у вас всё состыковалось.
Я развожу, травлю, сшиваю слои, паяю сабж и всю обвязку, гребёнки, и передаю в дар Ckona, в качестве попытки сказать "спасибо" за кардан. Срок - две недели. А может и меньше. Зато бесплатно. ))
Если согласны, прошу указать габариты и расположение разъёмов, чтобы потом у вас всё состыковалось.


shadowjack
втянувшийся
Non-conformist> Так что, разводить вам Pololu L3G4200D ? Сейчас своей материнкой занимаюсь, но могу переключиться для разнообразия.
Я за.
Non-conformist> Если согласны, прошу указать габариты и расположение разъёмов, чтобы потом у вас всё состыковалось.
Говорят, тут есть (не проверял): Proto Shield - Arduino prototyping shield
Ноги нужны как здесь: http://bildr.org/blog/wp-content/uploads/2011/06/L3G4200D-hookup2.png
+ 4 любых ноги из "digital" для управления клапанами.
+ Vin и землю на клеммник распаять, чтобы не маяться с разьемом.
+ можно LED (любая digital нога), джампер ресета и кнопочку (любая digital) вывести.
Я за.
Non-conformist> Если согласны, прошу указать габариты и расположение разъёмов, чтобы потом у вас всё состыковалось.
Говорят, тут есть (не проверял): Proto Shield - Arduino prototyping shield
Ноги нужны как здесь: http://bildr.org/blog/wp-content/uploads/2011/06/L3G4200D-hookup2.png
+ 4 любых ноги из "digital" для управления клапанами.
+ Vin и землю на клеммник распаять, чтобы не маяться с разьемом.
+ можно LED (любая digital нога), джампер ресета и кнопочку (любая digital) вывести.
Ckona> Есть датчики стартового ускорения. Замыкают при 2G.
Можно поподробнее про готовые датчики? И сколько это на пальцах - 2G? Старт у меня будет о-очень плавный, на ракетомодели совсем не похожий. Мне, наверное, и акселерометр не всякий подойдёт...
Сейчас буду смотреть, что там у меня валяется...
Можно поподробнее про готовые датчики? И сколько это на пальцах - 2G? Старт у меня будет о-очень плавный, на ракетомодели совсем не похожий. Мне, наверное, и акселерометр не всякий подойдёт...
Сейчас буду смотреть, что там у меня валяется...
shadowjack> Я за.
Понял. Подождём теперь начальника.
Только насчёт питания не понял - его что, на маминых гребёнках нет, отдельный разъём нужен? А что так? И так все шилды запитываются, через собственный разъём?
Понял. Подождём теперь начальника.
Только насчёт питания не понял - его что, на маминых гребёнках нет, отдельный разъём нужен? А что так? И так все шилды запитываются, через собственный разъём?
Non-conformist> Так что, разводить вам Pololu L3G4200D ?
Это платка, которая цифровой выход "гироскопа" превращает в аналоговый сигнал ?
Конечно, сделай ! Все одно к одному сходится.
Места много, разъемы ставь какие понравятся.
И не торопись.
Кардан с удовольствием сделаю новый - материал для него лежит и 2 раза в год инспектируется, а возможности несколько расширились.
Это платка, которая цифровой выход "гироскопа" превращает в аналоговый сигнал ?
Конечно, сделай ! Все одно к одному сходится.
Места много, разъемы ставь какие понравятся.
И не торопись.
Кардан с удовольствием сделаю новый - материал для него лежит и 2 раза в год инспектируется, а возможности несколько расширились.
Non-conformist> Старт у меня будет о-очень плавный
Ах ты ж... забыл, у тебя и 1,5G может не получиться.
Я бы делал оптический датчик отрыва от стартового стола, с вертикально "размазанным" пятном засветки бортового фотоприемника.
Чтобы не маяться от дневного освещения - модуляция 10...30 Гц.
Меняя высоту "мачты" со светодиодами, меняем высоту выдачи команды "полетели".
Но все равно, завтра поищу, где я натыкался на этот "G-switch"
Ах ты ж... забыл, у тебя и 1,5G может не получиться.
Я бы делал оптический датчик отрыва от стартового стола, с вертикально "размазанным" пятном засветки бортового фотоприемника.
Чтобы не маяться от дневного освещения - модуляция 10...30 Гц.
Меняя высоту "мачты" со светодиодами, меняем высоту выдачи команды "полетели".
Но все равно, завтра поищу, где я натыкался на этот "G-switch"
shadowjack
втянувшийся
Non-conformist> Только насчёт питания не понял - его что, на маминых гребёнках нет, отдельный разъём нужен? А что так? И так все шилды запитываются, через собственный разъём?
Как раз на гребенках есть, и ардуино будет через шилд питаться - мне не нравится разъем на ардуино, ненадежный он. Еще подумал - под питание клеммник не надо, закоротить при подключении можно. Просто площадки под толстый провод, а Ckona припаяет разъемы какие надо.
По разводке - не забудь разнести силовую и измерительную части подальше.
Да, мне сделаешь пустую платку? А я сам напаяю чего нужно.
И дырочки по краям предусмотри, как на ардуино - чтобы стойками скрепить можно было, чтоб не на гребенках держался.
Ckona, питание клапанов и электроники общее будет или раздельное?
Как раз на гребенках есть, и ардуино будет через шилд питаться - мне не нравится разъем на ардуино, ненадежный он. Еще подумал - под питание клеммник не надо, закоротить при подключении можно. Просто площадки под толстый провод, а Ckona припаяет разъемы какие надо.
По разводке - не забудь разнести силовую и измерительную части подальше.
Да, мне сделаешь пустую платку? А я сам напаяю чего нужно.
И дырочки по краям предусмотри, как на ардуино - чтобы стойками скрепить можно было, чтоб не на гребенках держался.
Ckona, питание клапанов и электроники общее будет или раздельное?
Ckona> Я бы делал оптический датчик отрыва от стартового стола, с вертикально "размазанным" пятном засветки бортового фотоприемника.
Ckona> Чтобы не маяться от дневного освещения - модуляция 10...30 Гц.
Жуть!
Чека на верёвочке гораздо проще.
Дребезг контактов прекрасно давится программно.
А ещё проще, если есть акселерометр, смотреть на него. Вообще никакого железа.
Ckona> Чтобы не маяться от дневного освещения - модуляция 10...30 Гц.
Жуть!
Чека на верёвочке гораздо проще.
Дребезг контактов прекрасно давится программно.
А ещё проще, если есть акселерометр, смотреть на него. Вообще никакого железа.

Non-conformist> Так что, разводить вам Pololu L3G4200D ?
Ckona> Это платка, которая цифровой выход "гироскопа" превращает в аналоговый сигнал?
Нет. Гироскоп выдаёт свои данные по трём осям уже полностью готовыми к обработке в МК, в цифровой форме. Не нужно ничего никуда превращать. Гироскоп связывается с МК двумя проводками по I2C.
Тебе бы желательно память на бортовой плате иметь. Было бы очень интересно посмотреть реальные лётные данные, реакцию корпуса на компенсирующие воздействия сопел. Для записи и сохранения этих данных нужна память. Например такая, как у меня: AT24C1024BN2GB2 (пятивольтовая). Она недорогая и много места на плате не займёт (SOIC-8).
Ckona> Это платка, которая цифровой выход "гироскопа" превращает в аналоговый сигнал?
Нет. Гироскоп выдаёт свои данные по трём осям уже полностью готовыми к обработке в МК, в цифровой форме. Не нужно ничего никуда превращать. Гироскоп связывается с МК двумя проводками по I2C.
Тебе бы желательно память на бортовой плате иметь. Было бы очень интересно посмотреть реальные лётные данные, реакцию корпуса на компенсирующие воздействия сопел. Для записи и сохранения этих данных нужна память. Например такая, как у меня: AT24C1024BN2GB2 (пятивольтовая). Она недорогая и много места на плате не займёт (SOIC-8).
Non-conformist> Гироскоп связывается с МК двумя проводками по I2C.
Так этот АРДУИН может воспринимать протокол I2C ?
В рекламном описании этой информации не увидел, потому и беспокоюсь.
shadowjack> Ckona, питание клапанов и электроники общее будет или раздельное?
Раздельное. С общим проводом.
Поскольку до понедельника я могу на Форуме вообще не появиться, вот в приложении техзадание.
Пусть и сырое, но "уже".
Постарался разложить все "по полочкам", в самом общем виде.
Попробуем...
АРДУИН, по моим оценкам, позволит выйти на летные испытания не через полтора года, а через 4-6 месяцев.
Так этот АРДУИН может воспринимать протокол I2C ?
В рекламном описании этой информации не увидел, потому и беспокоюсь.
shadowjack> Ckona, питание клапанов и электроники общее будет или раздельное?
Раздельное. С общим проводом.
Поскольку до понедельника я могу на Форуме вообще не появиться, вот в приложении техзадание.
Пусть и сырое, но "уже".
Постарался разложить все "по полочкам", в самом общем виде.
Попробуем...
АРДУИН, по моим оценкам, позволит выйти на летные испытания не через полтора года, а через 4-6 месяцев.
Прикреплённые файлы:
Non-conformist>> Гироскоп связывается с МК двумя проводками по I2C.
Ckona> Так этот АРДУИН может воспринимать протокол I2C ?
Не знаю. Но у L3G4200D есть как I2C, так и SPI. У меня память и гироскоп подключены к МК по I2C, поэтому и сказал про I2C.
Ckona> Так этот АРДУИН может воспринимать протокол I2C ?
Не знаю. Но у L3G4200D есть как I2C, так и SPI. У меня память и гироскоп подключены к МК по I2C, поэтому и сказал про I2C.

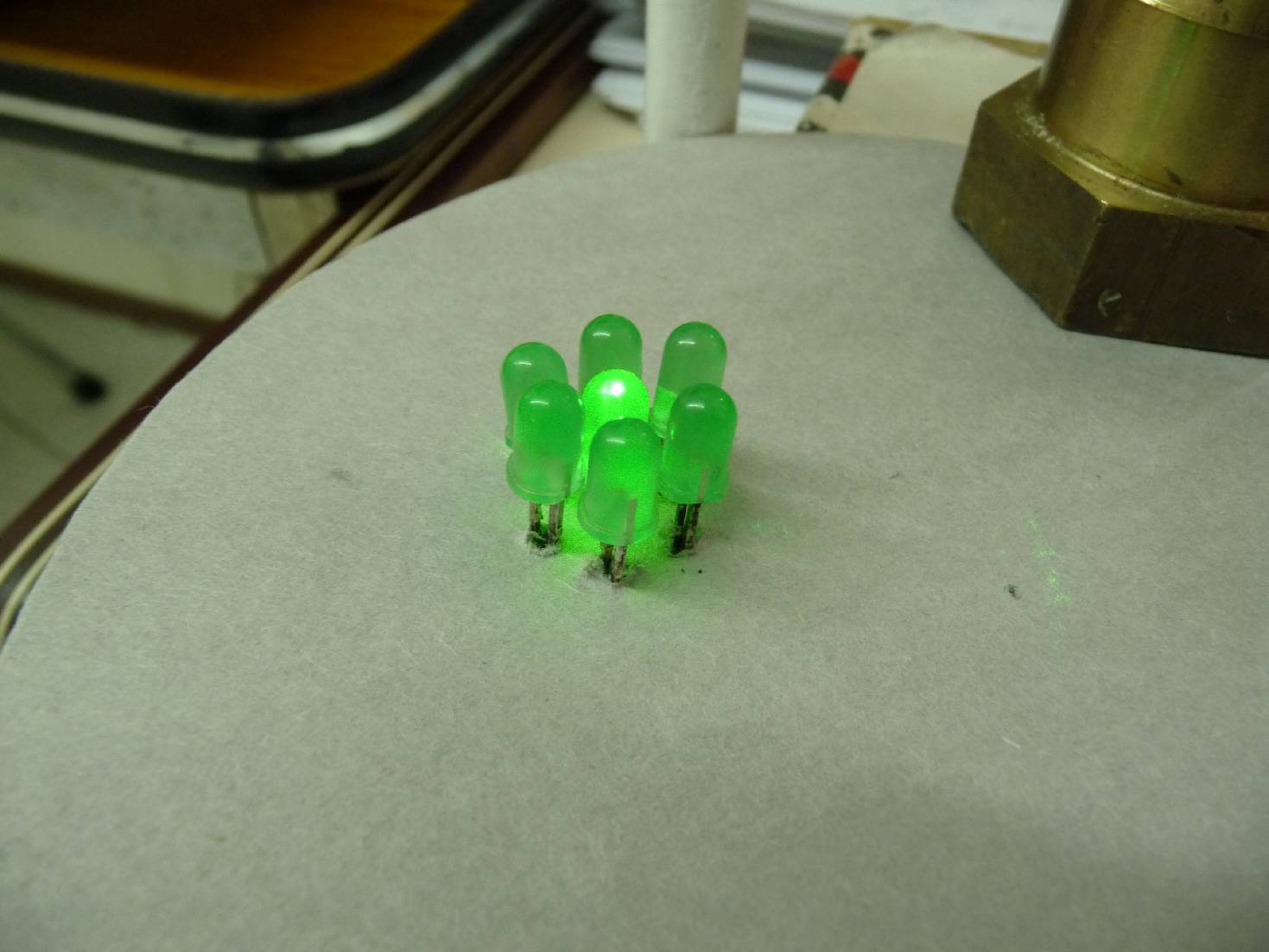
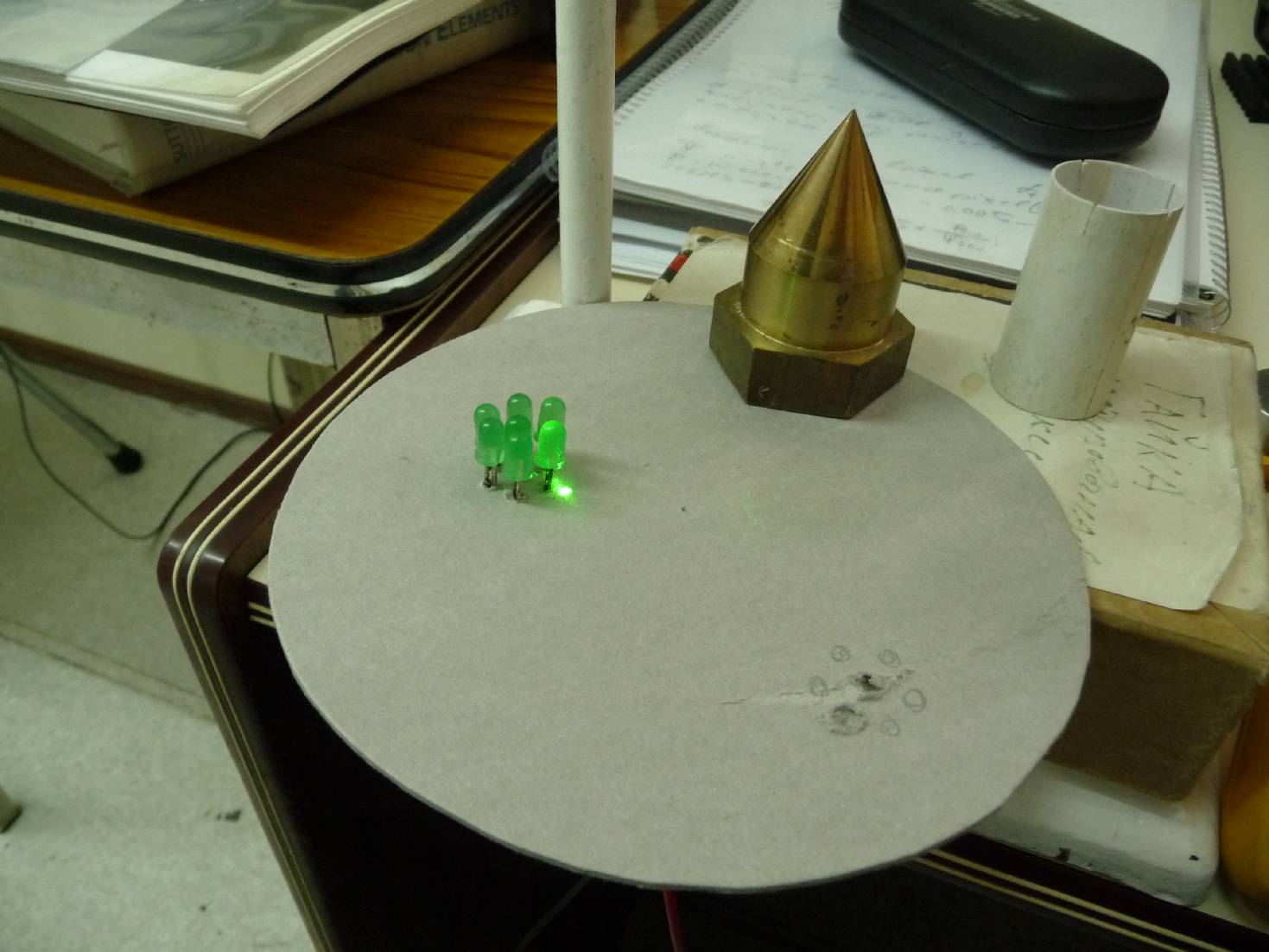
Пока возились со спектроскопией LED, возникла идея оптического датчика курса в системе координат ракеты относительно вертикали. В основе возможного сенсора лежит высокая спектральная избирательность пары эмиттер/детектор, образованной из LED одного цвета. Тогда, (на фото) один из LED из которого выходит коллимированный луч, может быть установлен на оси гироскопа в карданном подвесе и визуализировать вертикаль. В то же время, другой LED, установленный неподвижно под осью первого будет принимать излучение и преобразовывать его в электрический сигнал (ЭДС). То есть, будет образована остронаправленная оптико-электронная связь, детектирующая вертикаль. Если подобная система установлена в ракете, то точка подвеса и вершины приёмного LED образуют ось, которая будет соответствовать главной оси фюзеляжа. При любом наклоне равновесие (максимальный сигнал) будет нарушено и изменение сигнала (зависит от логики) может быть использовано для исполнения той, или иной команды. Если предположить, что количество приёмников 1+n, где n - число зависящее от задачи, то при помощи таких элементарных детекторов, расположенных по определённому закону вокруг центрального, можно решить задачу как определения краевых углов тангажа и рыскания, так и определить угловую скорость этого изменения. Теперь речь пойдёт о собственно матричном приёмнике, составленном из единичных LED. Предположим, что для задачи активной стабилизации необходимо иметь контроль над угловыми положениями ракеты по курсу относительно вертикали. Тогда можно собрать матрицу из необходимого количества элементов, чтобы покрыть площадь, например, равную площади шпангоута ракеты. Элементы в матрице соединены параллельно и реагируют на засветку внутри FoV, определяемого свойствами собственной оптики. Учитывая остронаправленную диаграмму излучения диода-эмиттера можно предположить, что реакция будет только с того приёмника, на который непосредственно попадёт луч. И угол вместе с направлением, а также скорость изменения курса, могут быть вычислены, как функция совокупности полученных сигналов в привязке к расположению элементов в матрице.
a_centaurus> идея оптического датчика курса в системе координат ракеты относительно вертикали.
Теперь "краткий курс". Берётся "лазерная указка" соответствующего цвета на 2-5 mW. К ней в пару подбираются обычные сигнальные LED. Отбор по сигналу. Размер LED зависит от необходимого разрешения. Число - от калибра ракеты, динамического диапазона и габаритов подвеса. Априори: для решения задачи ckona, можно было бы иметь гироскопный подвес длиной ок 10 см (двигатель, крепление и LED pointer). В калибре ракеты из "обычных бутылок" можно вполне иметь матрицу на площади, описываемой кругом в 60-70 мм. Речь идёт об дешёвых элементах, поэтому число в 25 -100 штук никого не испугает. Указка, как правило стоит в пределах от 10 до 300 USd, но только одна. В своём эксперименте я использовал 2mW "green LED" и 7 обычных зелёных сигнальных lED диаметра 5 мм. Также, для контроля были испытаны синий, белый, оранжевый и красный LEDs.
Понятное дело, сигнал чувствовали только белый, оранжевый и зелёный. Причём разница в сигналах была более чем в 50 раз.
Т. е. зелёный отвечал с 1500 mV, когда остальные имели 30-50 mV. Это при том, что pointer имел уже достаточно подсевшие батареи. Думаю, что оптимальный сигнал будет на уровне 2.2 V (как от Солнца . Учитывая цветовую температуру источника, близкую к 5000 К. 7 LED собранные в радиальную матрицу давали сигнал в пропорции от угла. Так, крайний давал ок 1 V, когда центральный давал 1.5 V. LED ojnter был подвешен в кардане без гироскопа. Думается, что в случае водной ракеты, когда стабилизация должна произойти на активном участке разгона, гироскоп может и не понадобиться. Достаточно будет маятника. Ведь когда ускорение сменит знак и подвес пойдёт вверх, всё уже будет закончено. В электронике я не специалист, но сложного быть не должно. Что-то вроде датчика апогея. Если кто-то может довести до схемного решения, буду благодарен. Наверно Брат-2 это было бы возможно/интересно. Гироскоп он уже имеет и в электронике не последний.
Теперь "краткий курс". Берётся "лазерная указка" соответствующего цвета на 2-5 mW. К ней в пару подбираются обычные сигнальные LED. Отбор по сигналу. Размер LED зависит от необходимого разрешения. Число - от калибра ракеты, динамического диапазона и габаритов подвеса. Априори: для решения задачи ckona, можно было бы иметь гироскопный подвес длиной ок 10 см (двигатель, крепление и LED pointer). В калибре ракеты из "обычных бутылок" можно вполне иметь матрицу на площади, описываемой кругом в 60-70 мм. Речь идёт об дешёвых элементах, поэтому число в 25 -100 штук никого не испугает. Указка, как правило стоит в пределах от 10 до 300 USd, но только одна. В своём эксперименте я использовал 2mW "green LED" и 7 обычных зелёных сигнальных lED диаметра 5 мм. Также, для контроля были испытаны синий, белый, оранжевый и красный LEDs.
Понятное дело, сигнал чувствовали только белый, оранжевый и зелёный. Причём разница в сигналах была более чем в 50 раз.
Т. е. зелёный отвечал с 1500 mV, когда остальные имели 30-50 mV. Это при том, что pointer имел уже достаточно подсевшие батареи. Думаю, что оптимальный сигнал будет на уровне 2.2 V (как от Солнца . Учитывая цветовую температуру источника, близкую к 5000 К. 7 LED собранные в радиальную матрицу давали сигнал в пропорции от угла. Так, крайний давал ок 1 V, когда центральный давал 1.5 V. LED ojnter был подвешен в кардане без гироскопа. Думается, что в случае водной ракеты, когда стабилизация должна произойти на активном участке разгона, гироскоп может и не понадобиться. Достаточно будет маятника. Ведь когда ускорение сменит знак и подвес пойдёт вверх, всё уже будет закончено. В электронике я не специалист, но сложного быть не должно. Что-то вроде датчика апогея. Если кто-то может довести до схемного решения, буду благодарен. Наверно Брат-2 это было бы возможно/интересно. Гироскоп он уже имеет и в электронике не последний.
a_centaurus> 7 LED собранные в радиальную матрицу давали сигнал в пропорции от угла. Так, крайний давал ок 1 V, когда центральный давал 1.5 V.
shadowjack
втянувшийся
Ckona>> Так этот АРДУИН может воспринимать протокол I2C ?
Non-conformist> Не знаю.
Сходите уже по ссылке - там как раз пример взаимодействия ардуино <-> I2C.
При чтении 3 значений с гиры и 3 с акселерометра, и записи их в EEPROM 100 раз в секунду, получается 24000 бит/сек, учитывая накладные расходы. Стандартная скорость I2C - 100 000 бит/сек, т.е. имеется четырехкратный запас. Возможен переход на I2C 400 000 бит/сек (по крайней мере Arduino и L3G4200D такую скорость поддерживают).
Non-conformist> Не знаю.
Сходите уже по ссылке - там как раз пример взаимодействия ардуино <-> I2C.
При чтении 3 значений с гиры и 3 с акселерометра, и записи их в EEPROM 100 раз в секунду, получается 24000 бит/сек, учитывая накладные расходы. Стандартная скорость I2C - 100 000 бит/сек, т.е. имеется четырехкратный запас. Возможен переход на I2C 400 000 бит/сек (по крайней мере Arduino и L3G4200D такую скорость поддерживают).
Читаю. Вопросы...
1. Если два устройства слейвами сделаны, то куда тянуть SDO первого, и куда - второго?
2. Почему такой адресной ноги нет у памяти?
3. Могу ли я параллелить SDA и SCL (гироскопа и акселя) ДО транзисторов преобразования уровней, чтобы не умножать их количество на два?
1. Если два устройства слейвами сделаны, то куда тянуть SDO первого, и куда - второго?
2. Почему такой адресной ноги нет у памяти?
3. Могу ли я параллелить SDA и SCL (гироскопа и акселя) ДО транзисторов преобразования уровней, чтобы не умножать их количество на два?
Сразу обращу ваше внимание, что переход на 400 000 бит/с как минимум не гарантирован - это я вычитал в сопроводительных текстах Pololu и в ДШ L3G4200D.

SDO это название ножки для SPI, в iic это sda. Их как и scl можно запаралеливать до преобразователя.
Адресная нога тоже только для spi, в iic чип выбирается передаваемым адресом.
Адресная нога тоже только для spi, в iic чип выбирается передаваемым адресом.
GOGI> Адресная нога тоже только для spi, в iic чип выбирается передаваемым адресом.
А зачем тогда это: "But other than Power, Ground, and the I2C pins, we just need to connect SD0 to 3.3v (to set the I2c Address)." И в Pololu эта нога подтянута к питанию.
А зачем тогда это: "But other than Power, Ground, and the I2C pins, we just need to connect SD0 to 3.3v (to set the I2c Address)." И в Pololu эта нога подтянута к питанию.
shadowjack
втянувшийся
Non-conformist> Читаю. Вопросы...
Non-conformist> 1. Если два устройства слейвами сделаны, то куда тянуть SDO первого, и куда - второго?
Без разницы, к земле или +3.3V. Если устройства идентичные, то одно - туда, другое - сюда. Это сделано для того, чтобы можно было 2 одинаковых устройства адресовать.
Non-conformist> 2. Почему такой адресной ноги нет у памяти?
Видимо, не рассчитывают, что 2 одинаковых чипа памяти будут на одной шине (логично, проще в 2 раза большего объема поставить).
Non-conformist> 3. Могу ли я параллелить SDA и SCL (гироскопа и акселя) ДО транзисторов преобразования уровней, чтобы не умножать их количество на два?
Можно. Учти при проектировании преобразователя уровней, что линии двунаправленые.
Non-conformist> 1. Если два устройства слейвами сделаны, то куда тянуть SDO первого, и куда - второго?
Без разницы, к земле или +3.3V. Если устройства идентичные, то одно - туда, другое - сюда. Это сделано для того, чтобы можно было 2 одинаковых устройства адресовать.
Non-conformist> 2. Почему такой адресной ноги нет у памяти?
Видимо, не рассчитывают, что 2 одинаковых чипа памяти будут на одной шине (логично, проще в 2 раза большего объема поставить).
Non-conformist> 3. Могу ли я параллелить SDA и SCL (гироскопа и акселя) ДО транзисторов преобразования уровней, чтобы не умножать их количество на два?
Можно. Учти при проектировании преобразователя уровней, что линии двунаправленые.
shadowjack
втянувшийся
Non-conformist> Сразу обращу ваше внимание, что переход на 400 000 бит/с как минимум не гарантирован - это я вычитал в сопроводительных текстах Pololu и в ДШ L3G4200D.
I2C fast mode Max 400 kHz - из ДШ на L3G4200D.
I2C fast mode Max 400 kHz - из ДШ на L3G4200D.
shadowjack
втянувшийся
Non-conformist> А зачем тогда это: "But other than Power, Ground, and the I2C pins, we just need to connect SD0 to 3.3v (to set the I2c Address)." И в Pololu эта нога подтянута к питанию.
Можно задавать последний бит адреса, чтобы повесить 2 гиры на одну шину. К 3.3V - последний бит адреса 1, к земле - 0.
Можно задавать последний бит адреса, чтобы повесить 2 гиры на одну шину. К 3.3V - последний бит адреса 1, к земле - 0.
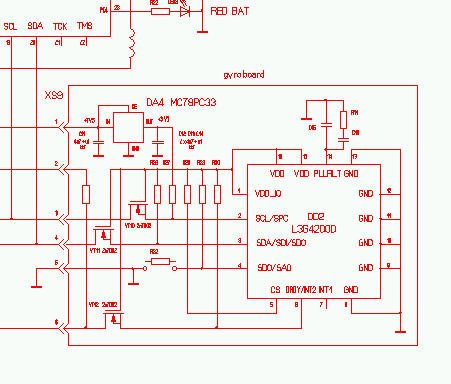
shadowjack> Учти при проектировании преобразователя уровней, что линии двунаправленые.
В каком смысле учитывать? Такое подойдёт? Эта схема срисована с платы Pololu.
В каком смысле учитывать? Такое подойдёт? Эта схема срисована с платы Pololu.
Прикреплённые файлы:
Реклама Google — средство выживания форумов :)
Non-conformist>> Сразу обращу ваше внимание, что переход на 400 000 бит/с как минимум не гарантирован - это я вычитал в сопроводительных текстах Pololu и в ДШ L3G4200D.
shadowjack> I2C fast mode Max 400 kHz - из ДШ на L3G4200D.
Там звёздочка стоит, или что-то в этом роде. То, что не всё гладко с Fast Mode - это стопудово, я прекрасно помню. Позже приведу конкретный текст.
shadowjack> I2C fast mode Max 400 kHz - из ДШ на L3G4200D.
Там звёздочка стоит, или что-то в этом роде. То, что не всё гладко с Fast Mode - это стопудово, я прекрасно помню. Позже приведу конкретный текст.
Copyright © Balancer 1997..2022
Создано 09.01.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 09.01.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}