 shadowjack
shadowjack
 инфо
инфо инструменты
инструменты Non-conformist
Non-conformist


 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
/remove_before.jpg)
Стабилизация Активная - часть II
Теги:

shadowjack
втянувшийся
shadowjack>> В данном случае нужно писать d.accel_x
Ckona> Ага. Понял.
Ckona> Это профессиональный эквивалент обезьянолюбительского:
Ckona> void destruct(struct imu_data *d) {
Ckona> Wx=d->accel_x;
Ckona> Wy=d->accel_y;
Ckona> Wz=d->accel_z;
Ckona> }
Это будет работать, только если Wx и др. - глобальные. Так делать не нужно.
Можно в теле loop написать для понятности:
int Wx, Wy, Wz;
Wx = d.accel_x;
Wy = d.accel_y;
Wz = d.accel_z;
Ckona> В принципе, оно и не сильно надо, "летный" диапазон должен быть 8G - вопрос из любопытства.
См. setupLIS331DL - writeRegister(LIS331DL_I2C_ADDR, LIS331DL_CTRL_REG1, 0b01000111);
Третий бит слева - как раз и отвечает за 2/8G. Я так понимаю, что сейчас стоит 2G. Для 8G нужно поставить 0b01100111.
Ckona> Ага. Понял.
Ckona> Это профессиональный эквивалент обезьянолюбительского:
Ckona> void destruct(struct imu_data *d) {
Ckona> Wx=d->accel_x;
Ckona> Wy=d->accel_y;
Ckona> Wz=d->accel_z;
Ckona> }
Это будет работать, только если Wx и др. - глобальные. Так делать не нужно.
Можно в теле loop написать для понятности:
int Wx, Wy, Wz;
Wx = d.accel_x;
Wy = d.accel_y;
Wz = d.accel_z;
Ckona> В принципе, оно и не сильно надо, "летный" диапазон должен быть 8G - вопрос из любопытства.
См. setupLIS331DL - writeRegister(LIS331DL_I2C_ADDR, LIS331DL_CTRL_REG1, 0b01000111);
Третий бит слева - как раз и отвечает за 2/8G. Я так понимаю, что сейчас стоит 2G. Для 8G нужно поставить 0b01100111.



А что, шестиосевую писалку уже проехали? Я что-то пропустил?
Skype: a_schabanow


Non-conformist> А что, шестиосевую писалку уже проехали? Я что-то пропустил?
Нет, ничего не пропустил, работоспособность по "шести осям" проверена на предыдущей странице (затухающие колебания).
Курочка клюет по зернышку - сейчас завершается определение перекоса стартовой направляющей.
К вечеру я сформулирую, что планируется дальше, в том числе с угловыми скоростями.
Нет, ничего не пропустил, работоспособность по "шести осям" проверена на предыдущей странице (затухающие колебания).
Курочка клюет по зернышку - сейчас завершается определение перекоса стартовой направляющей.
К вечеру я сформулирую, что планируется дальше, в том числе с угловыми скоростями.
Это сообщение редактировалось 02.04.2012 в 14:36
shadowjack> Третий бит слева - как раз и отвечает за 2/8G. Я так понимаю, что сейчас стоит 2G.
Восемь двоичных разрядов - это ±128, на ±1G дает отсчет ±57. Действительно, установлено 2G.
Восемь двоичных разрядов - это ±128, на ±1G дает отсчет ±57. Действительно, установлено 2G.
Ckona> ... затухающие колебания ...
Ты их в бортовую память писал или в монитор?
Ты их в бортовую память писал или в монитор?
Skype: a_schabanow
Ckona>> ... затухающие колебания ...
Non-conformist> Ты их в бортовую память писал или в монитор?
В монитор. Память не щупал еще.
Non-conformist> Ты их в бортовую память писал или в монитор?
В монитор. Память не щупал еще.
Да я знаю, что в монитор. Вопрос изначально был наводящий, и не к тебе. ))
Skype: a_schabanow
Ckona> К вечеру я сформулирую, что планируется дальшe
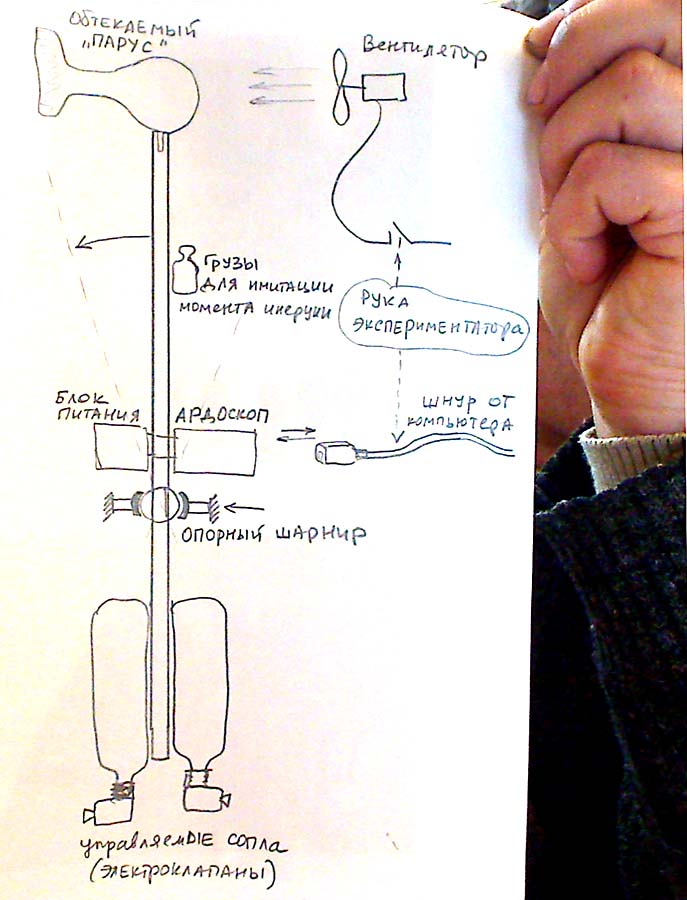
Учитывая опыт Н-1, все, что можно тестировать на земле - будет тестироваться.
Ардоскоп один.
Рядом с компьютером, на котором правится софт, будет установлен вентилятор.
На верхушку "маятникового стержня" - обтекаемый парус. Воздушный или пенопластовый шарик с хвостом.
"Маятник" должен обладать моментом инерции, как у настоящего "Пеликана".
Шарнир - почти в центре тяжести. Почти - чтоб оно все-таки "висело" не переворачиваясь.
Включив удаленный вентилятор, можно имитировать медленное отклонение от вертикальной траектории.
Включив близкий вентилятор, можно имитировать внезапную угловую скорость.
Запустив систему при отклоненном маятнике, имитируем наклонный старт, должны наблюдать выравнивание.
Приятно, что этот же стенд можно использовать как для релейного, так и для пропорционального регулирования (меняя длительность пшиков).
Благодаря умелым и своевременным рекомендациям ShadowJack'a, думаю, софтверных проблем не будет.
Учитывая опыт Н-1, все, что можно тестировать на земле - будет тестироваться.
Ардоскоп один.
Рядом с компьютером, на котором правится софт, будет установлен вентилятор.
На верхушку "маятникового стержня" - обтекаемый парус. Воздушный или пенопластовый шарик с хвостом.
"Маятник" должен обладать моментом инерции, как у настоящего "Пеликана".
Шарнир - почти в центре тяжести. Почти - чтоб оно все-таки "висело" не переворачиваясь.
Включив удаленный вентилятор, можно имитировать медленное отклонение от вертикальной траектории.
Включив близкий вентилятор, можно имитировать внезапную угловую скорость.
Запустив систему при отклоненном маятнике, имитируем наклонный старт, должны наблюдать выравнивание.
Приятно, что этот же стенд можно использовать как для релейного, так и для пропорционального регулирования (меняя длительность пшиков).
Благодаря умелым и своевременным рекомендациям ShadowJack'a, думаю, софтверных проблем не будет.
Прикреплённые файлы:
Ckona> Момент инерции J= (1/12)*7(кГ)*1,8**2(кв.м.) = 2 (кГ*кв.м).
...
Ckona> остановить вращение корректирующим импульсом с рычагом r = 0,5 м,
Представил ракету в виде двенадцати элементов с различными массами и рассчитал момент инерции и положение ЦТ.
Получилось (в зависимости от расходования массы в первой ступени) J=0,98 ... 0,75 кГ*кв.м, а рычаг r = 0,48 ... 0,7 м.
Успокоен - импульса хватит.
Теперь можно не вслепую вешать грузы на штангу.
...
Ckona> остановить вращение корректирующим импульсом с рычагом r = 0,5 м,
Представил ракету в виде двенадцати элементов с различными массами и рассчитал момент инерции и положение ЦТ.
Получилось (в зависимости от расходования массы в первой ступени) J=0,98 ... 0,75 кГ*кв.м, а рычаг r = 0,48 ... 0,7 м.
Успокоен - импульса хватит.
Теперь можно не вслепую вешать грузы на штангу.

Как говорил покойный адмирал Нахимов: «Лучше пидор на рее, чем акула в трюме»

!
Запустил пищалку и проверил все каналы управления электромагнитами.
До-о-о-олго возился, пока не сообразил соединить перемычкой "слаботочный" и "сильноточный" общие провода.
Теперь буду "прописывать логику" и устанавливать вентилятор.
Хотя трение в притертом шарнире такое, что отклонить стержень можно, просто дунув на его верхний конец.
Ну, еще одна мелкая проверка - питание от батарейки (пока через USB).
Тут еще не продумал - какое напряжение выбрать - 6 вольт согласно схеме Ардоскопа, разработанной Non-Conformist'ом, или "с запасом" - ну там 9 или 12 вольт от маленькой батарейки.
Запустил пищалку и проверил все каналы управления электромагнитами.
До-о-о-олго возился, пока не сообразил соединить перемычкой "слаботочный" и "сильноточный" общие провода.
Теперь буду "прописывать логику" и устанавливать вентилятор.
Хотя трение в притертом шарнире такое, что отклонить стержень можно, просто дунув на его верхний конец.
Ну, еще одна мелкая проверка - питание от батарейки (пока через USB).
Тут еще не продумал - какое напряжение выбрать - 6 вольт согласно схеме Ардоскопа, разработанной Non-Conformist'ом, или "с запасом" - ну там 9 или 12 вольт от маленькой батарейки.
Ckona> Теперь буду "прописывать логику"
Ну, первая "проба пера" успешная !
Сижу... ничего не делаю... тишина.
Отклоняю стержень в сторону. Пороговое значение - 10 градусов. ПИ-И-И-И-И !
Жена (вяло и любя): Заткнись !
Нажимаю второй рукой на кнопку RESET. ... тишина.
Отпускаю стержень, он возвращается в исходное положение - ПИ-И-И-И-И-И-И !
Жена (звонко и яростно): Заткнись ! Я не могу заснуть !
Тут я обнаруживаю, что перепутал в коде цифровые отсчеты и градусы в секунду: один отсчет равен 0,07 градуса в секунду.
... тишина.
Ну, первая "проба пера" успешная !
Сижу... ничего не делаю... тишина.
Отклоняю стержень в сторону. Пороговое значение - 10 градусов. ПИ-И-И-И-И !
Жена (вяло и любя): Заткнись !
Нажимаю второй рукой на кнопку RESET. ... тишина.
Отпускаю стержень, он возвращается в исходное положение - ПИ-И-И-И-И-И-И !
Жена (звонко и яростно): Заткнись ! Я не могу заснуть !
Тут я обнаруживаю, что перепутал в коде цифровые отсчеты и градусы в секунду: один отсчет равен 0,07 градуса в секунду.
... тишина.
Ckona> ... тишина.
Все-таки, насколько цифровая обработка тупее аналогового реального мира.
1) чтобы не работать с плавающей точкой, принимаем один дискрет по времени равный 1, хотя реально это 0,05 с. В результате углы как интегралы от угловой скорости получаются численно в 20 раз больше, чем их реальноые значения в градусах.
2) чтобы не учитывать цену одного разряда (0,07 углового градуса в секунду), переходим к "условным" единицам измерения угловой скорости: одна единица равна весу одного разряда, это в 14,3 раза меньше, чем один градус в секунду.
3) В результате пороговому значению угла в 5,00 градусов соответствует значение безразмерной "цифровой хрени" 5[градусов]*14,3[разрядов/градус/с]х20[отсчетов/с] = 1429 .
Зато вычислений - никаких: складываем значения угловой скорости, пока сумма не достигнет 1429.
Примечание: объявлен порог 2 градуса в секунду, ниже которого угловая скорость считается нулевой.
Все-таки, насколько цифровая обработка тупее аналогового реального мира.
1) чтобы не работать с плавающей точкой, принимаем один дискрет по времени равный 1, хотя реально это 0,05 с. В результате углы как интегралы от угловой скорости получаются численно в 20 раз больше, чем их реальноые значения в градусах.
2) чтобы не учитывать цену одного разряда (0,07 углового градуса в секунду), переходим к "условным" единицам измерения угловой скорости: одна единица равна весу одного разряда, это в 14,3 раза меньше, чем один градус в секунду.
3) В результате пороговому значению угла в 5,00 градусов соответствует значение безразмерной "цифровой хрени" 5[градусов]*14,3[разрядов/градус/с]х20[отсчетов/с] = 1429 .
Зато вычислений - никаких: складываем значения угловой скорости, пока сумма не достигнет 1429.
Примечание: объявлен порог 2 градуса в секунду, ниже которого угловая скорость считается нулевой.
Это сообщение редактировалось 07.04.2012 в 09:25

Ckona>> ... тишина.
Ckona> Все-таки, насколько цифровая обработка тупее аналогового реального мира.
Ckona> 1) чтобы не работать с плавающей точкой, принимаем один дискрет по времени равный 1, хотя реально это 0,05 с. В результате углы как интегралы от угловой скорости получаются численно в 20 раз больше, чем их реальноые значения в градусах.
И в три раза меньше, чем их реальные значения в минутах! Вопрос - в чём мерять, в каких попугаях!
Ckona> 2) чтобы не учитывать цену одного разряда (0,07 углового градуса в секунду), переходим к "условным" единицам измерения угловой скорости: одна единица равна весу одного разряда, это в 14,3 раза меньше, чем один градус в секунду.
Общепринятые и привычные единицы тоже условные, может, радиан ещё имеет под собой какие-то обоснования, а градусы - никаких.
Ckona> 3) В результате пороговому значению угла в 5,00 градусов соответствует значение безразмерной "цифровой хрени" 5[градусов]*14,3[разрядов/градус/с]х20[отсчетов/с] = 1429 .
Ckona> Зато вычислений - никаких: складываем значения угловой скорости, пока сумма не достигнет 1429.
А вот это - непонятно и нелогично. Правильнее было бы определить среднюю величину шума угловой скорости в покое, и отталкиваться от неё. "три сигма" - вот это разумно и законно.
Ckona> Примечание: объявлен порог 2 градуса в секунду, ниже которого угловая скорость считается нулевой.
Мой дипломный проект в институте - это программа, которая тоже считала функцию неопределённости поданного на вход радиолокационного сигнала, и всё в целых числах - фурье-преобразования, табличные синусы и косинусы, накопление и т.д.
Так что в то время в нормировке я собаку съел. Но и сейчас много чего помню.
У ракеты 15А30 - первой советской МБР с БЦВМ - тоже не было плавающей точки, да и объём памяти был невелик по всем меркам. И там нормировка имела важнейшее значение. И очень понятно, за что военные любят миллирадианы, любовно называя их "тысячными".
Ckona> Все-таки, насколько цифровая обработка тупее аналогового реального мира.
Ckona> 1) чтобы не работать с плавающей точкой, принимаем один дискрет по времени равный 1, хотя реально это 0,05 с. В результате углы как интегралы от угловой скорости получаются численно в 20 раз больше, чем их реальноые значения в градусах.
И в три раза меньше, чем их реальные значения в минутах! Вопрос - в чём мерять, в каких попугаях!
Ckona> 2) чтобы не учитывать цену одного разряда (0,07 углового градуса в секунду), переходим к "условным" единицам измерения угловой скорости: одна единица равна весу одного разряда, это в 14,3 раза меньше, чем один градус в секунду.
Общепринятые и привычные единицы тоже условные, может, радиан ещё имеет под собой какие-то обоснования, а градусы - никаких.
Ckona> 3) В результате пороговому значению угла в 5,00 градусов соответствует значение безразмерной "цифровой хрени" 5[градусов]*14,3[разрядов/градус/с]х20[отсчетов/с] = 1429 .
Ckona> Зато вычислений - никаких: складываем значения угловой скорости, пока сумма не достигнет 1429.
А вот это - непонятно и нелогично. Правильнее было бы определить среднюю величину шума угловой скорости в покое, и отталкиваться от неё. "три сигма" - вот это разумно и законно.
Ckona> Примечание: объявлен порог 2 градуса в секунду, ниже которого угловая скорость считается нулевой.
Мой дипломный проект в институте - это программа, которая тоже считала функцию неопределённости поданного на вход радиолокационного сигнала, и всё в целых числах - фурье-преобразования, табличные синусы и косинусы, накопление и т.д.
Так что в то время в нормировке я собаку съел. Но и сейчас много чего помню.
У ракеты 15А30 - первой советской МБР с БЦВМ - тоже не было плавающей точки, да и объём памяти был невелик по всем меркам. И там нормировка имела важнейшее значение. И очень понятно, за что военные любят миллирадианы, любовно называя их "тысячными".


А.С.> Правильнее было бы определить среднюю величину шума угловой скорости в покое, и отталкиваться от неё. "три сигма" - вот это разумно и законно.
")
Это первое, что я сделал !
Сигма - 9 разрядов. 28 разрядов - это 2 градуса в секунду.
Подожди чуток, у меня сейчас технические затруднения. Не вижу сложения, коим представлен интеграл от угловой скорости. Где-то в коде напортачил. Да и на работу пора.
Это первое, что я сделал !
Сигма - 9 разрядов. 28 разрядов - это 2 градуса в секунду.
Подожди чуток, у меня сейчас технические затруднения. Не вижу сложения, коим представлен интеграл от угловой скорости. Где-то в коде напортачил. Да и на работу пора.
А.С.>> Правильнее было бы определить среднюю величину шума угловой скорости в покое, и отталкиваться от неё. "три сигма" - вот это разумно и законно.
Ckona>
Ckona> Это первое, что я сделал !
Ckona> Сигма - 9 разрядов.
В смысле, единиц младшего разряда? LSB по-американски. Это пиковый или среднеквадратический?
Ckona> 28 разрядов - это 2 градуса в секунду.
Даже если это среднеквадратический - четыре сигма грубовато. Если же пиковый, непростительно грубо
Там ещё это зависит от быстродействия рулевых машин и прочих фазовых проблем.
А вообще - успехов, очень здорово!
Ckona>
Ckona> Это первое, что я сделал !
Ckona> Сигма - 9 разрядов.
В смысле, единиц младшего разряда? LSB по-американски. Это пиковый или среднеквадратический?
Ckona> 28 разрядов - это 2 градуса в секунду.
Даже если это среднеквадратический - четыре сигма грубовато. Если же пиковый, непростительно грубо
Там ещё это зависит от быстродействия рулевых машин и прочих фазовых проблем.
А вообще - успехов, очень здорово!
Ckona>> Сигма - 9 разрядов.
А.С.> В смысле, единиц младшего разряда? LSB по-американски. Это пиковый или среднеквадратический?
Записал выборку за несколько секунд.
Обработал с гипотезой, что распределение нормальное.
Вычисленное значение СКО - 9 единиц младшего разряда.
А.С.> Даже если это среднеквадратический - четыре сигма грубовато.
3х9=27
4х9=36
А.С.> В смысле, единиц младшего разряда? LSB по-американски. Это пиковый или среднеквадратический?
Записал выборку за несколько секунд.
Обработал с гипотезой, что распределение нормальное.
Вычисленное значение СКО - 9 единиц младшего разряда.
А.С.> Даже если это среднеквадратический - четыре сигма грубовато.
3х9=27
4х9=36
Ckona>>> Сигма - 9 разрядов.
Да, тогда всё по науке! респект!
А.С.>> Даже если это среднеквадратический - четыре сигма грубовато.
Ckona> 3х9=27
Ckona> 4х9=36
Ckona>
Да, чего это я...
Да, тогда всё по науке! респект!
А.С.>> Даже если это среднеквадратический - четыре сигма грубовато.
Ckona> 3х9=27
Ckona> 4х9=36
Ckona>
Да, чего это я...
Подробное описание технического решения стабилизации ракеты: с чертежами, схемами, фото-видео.

Attitude Stability Unit
Last year we launched our 2-stage Super-ARLISS twice. The Super-ARLISS is a big and slow rocket intended to carry payloads to 30,000 feet. We launched it at Mavericks 2008 with a very long inter-stage delay (8-seconds) and at XPRS with a short (1-second) delay. Both times it was significantly affected by the winds aloft. After the second flight, we decided that we needed to do something to dynamically compensate for crosswind. This project is to build a device that can dynamically compensate for wind and other flight perturbations and keep a rocket flying straight up. // Дальше — www.feretich.com
lincoln> Подробное описание технического решения стабилизации ракеты: с чертежами, схемами, фото-видео.
В отсеке электроники есть свободное место для полезной нагрузки - для студенческих электронных проектов. Т.е. люди работают в контакте с ВУЗами.
Две рулевых плоскости наводят на мысль о совмещении каналов тангажа и рысканья через поворот на 90 градусов по крену, как у немецкой X-4. Всего получается два электропривода: тангаж_рысканье и крен. Нормальное, рациональное решение.
Жаль, что нет исходников.
В отсеке электроники есть свободное место для полезной нагрузки - для студенческих электронных проектов. Т.е. люди работают в контакте с ВУЗами.
Две рулевых плоскости наводят на мысль о совмещении каналов тангажа и рысканья через поворот на 90 градусов по крену, как у немецкой X-4. Всего получается два электропривода: тангаж_рысканье и крен. Нормальное, рациональное решение.
Жаль, что нет исходников.
Skype: a_schabanow
Non-conformist> Т.е. люди работают в контакте с ВУЗами.
А также на ВУЗовских ресурсах.
А также на ВУЗовских ресурсах.


Non-conformist> Всего получается два электропривода: тангаж_рысканье и крен.
А можно было вообще один привод на тангаж и рысканье поделить, без крена - проворот по крену обеспечить стационарной закруткой перьев хвостового стабилизатора.
А можно было вообще один привод на тангаж и рысканье поделить, без крена - проворот по крену обеспечить стационарной закруткой перьев хвостового стабилизатора.
Skype: a_schabanow
Non-conformist> Нормальное, рациональное решение.
Если у вас своя разработка, то копировать конечно смысла нет, но может что полезное почерпнуть.
Non-conformist> Жаль, что нет исходников.
Если принципиально нужно, то написать, может поделятся.))
Если у вас своя разработка, то копировать конечно смысла нет, но может что полезное почерпнуть.
Non-conformist> Жаль, что нет исходников.
Если принципиально нужно, то написать, может поделятся.))
shadowjack
втянувшийся
Ckona, вот шестиосевая писалка. По крайней мере, должна писать.
У программы 3 режима - ожидание, запись, сброс данных.
При включении - в режиме ожидания. Короткое нажатие на кнопку - переключение запись/ожидание (новая запись затирает старую). Длинное (более 1 сек) нажатие на кнопку - сброс данных на ком-порт. После сброса переключается в режим ожидания.
Индикации пока нет, только отладочная печать на ком-порт.
Кнопка настроена на 4-ю ногу (у нас так)? Исправь наверху #define BUTTON_PIN 4 на нужный при необходимости.
Поэкспериментируй пожалуста.
У программы 3 режима - ожидание, запись, сброс данных.
При включении - в режиме ожидания. Короткое нажатие на кнопку - переключение запись/ожидание (новая запись затирает старую). Длинное (более 1 сек) нажатие на кнопку - сброс данных на ком-порт. После сброса переключается в режим ожидания.
Индикации пока нет, только отладочная печать на ком-порт.
Кнопка настроена на 4-ю ногу (у нас так)? Исправь наверху #define BUTTON_PIN 4 на нужный при необходимости.
Поэкспериментируй пожалуста.
Прикреплённые файлы:
ardoscope_eeprom.zip (скачать)
[6,5 кБ]
Реклама Google — средство выживания форумов :)
shadowjack> Ckona, вот шестиосевая писалка.
Сколько 8-разрядных слов (байт) может быть записано ?
С какой скоростью ведется запись ?
Какую нужно устанавливать скорость считывания записанного через сом-порт ?
Сколько 8-разрядных слов (байт) может быть записано ?
С какой скоростью ведется запись ?
Какую нужно устанавливать скорость считывания записанного через сом-порт ?
Copyright © Balancer 1997..2018
Создано 09.01.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 09.01.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
