-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
 Xan
Xan

Non-conformist> А не грубо будет оцифровывать угол прямо светодиодной линейкой? Сколько там светодиодов? С каждого выход прямо на логический порт, или как-то на АЦП?
Внезапно обнаружил, что купил не то, что собирался.
Вот это поворот!!!
TSL3301CL
102 × 1 Sensor Element Organization
300 Dots-per-Inch Pixel Pitch
High Sensitivity
On-Chip 8-Bit Analog-to-Digital Conversion
Three-Zone Programmable Offset (Dark Level) and Gain
High Speed Serial Interface
1 MHz Pixel Rate
Single 3-V to 5.5-V Supply
SMD 9.5*3 мм
Внезапно обнаружил, что купил не то, что собирался.
Вот это поворот!!!
TSL3301CL
102 × 1 Sensor Element Organization
300 Dots-per-Inch Pixel Pitch
High Sensitivity
On-Chip 8-Bit Analog-to-Digital Conversion
Three-Zone Programmable Offset (Dark Level) and Gain
High Speed Serial Interface
1 MHz Pixel Rate
Single 3-V to 5.5-V Supply
SMD 9.5*3 мм


 инфо
инфо инструменты
инструменты a_centaurus
a_centaurus

Non-conformist> приемлемые приемлемый приемлемо неприемлем
Спасибо. За критику стиля. Плохо стал язык чувствовать... Правда, я хотя бы в слове "приемлИмый" ошибки не делаю.
Спасибо. За критику стиля. Плохо стал язык чувствовать... Правда, я хотя бы в слове "приемлИмый" ошибки не делаю.
 Non-conformist
Non-conformist

Языковой барьер и здесь даёт себя знать - не понял я, где смеяться. Но на всякий случай повторюсь: слово "приемлЕмый" пишется через Е; это просто проверить, если есть русскоязычный гугль.



Non-conformist> слово "приемлЕмый" пишется через Е; это просто проверить, если есть русскоязычный гугль.
Гугль тоже люди писали )))))") .
.
Гугль тоже люди писали )))))
.

Костян1979> Гугль тоже люди писали ))))) .
Пока что там грамотных больше, чем не. Наверно временно))))
.Пока что там грамотных больше, чем не. Наверно временно))))

Non-conformist> Языковой барьер и здесь даёт себя знать - не понял я, где смеяться. Но на всякий случай повторюсь: слово "приемлЕмый" пишется через Е; это просто проверить, если есть русскоязычный гугль.
Спросил у жены (она лингвист). Ответ: "приемлЕмый". Попросил проверить по словарю (Словарь синонимов русского языка под ред. Чешко). Пишется: "приемлЕмый". Полезно освежать память.
Спросил у жены (она лингвист). Ответ: "приемлЕмый". Попросил проверить по словарю (Словарь синонимов русского языка под ред. Чешко). Пишется: "приемлЕмый". Полезно освежать память.
Xan> "Мелкие детали" такие:
Xan> Невозможно сделать достаточно узкую щель, чтоб не перегрузить фотодиоды.
Xan> Думаю сделать камеру-обскуру, а на зайчик, который в ней получится, будет смотреть коробочка с линейкой и щелью.
Вот возможные технические решения для твоей задачи. Без всякого hightech. Камера-оскура из пробки для труб PVC от обьектива теодолита и державка с молочным стеклом, как экран или ослабитель потока.
1. Вариант с маской. (фото 1,2) На отверстие к.о. наклеен обьект нужной ширины (ширина выбирается в зависимости от чувств. приёмника. На экране видна тёмная полоска в окружении светлых сегментов. В данном случае линейка CCD регистрирует "провал" от тени. Меньше проблем с засветкой, однако нужно поэкспериментировать с размерами, чтобы тень не сошла с линейки, обеспечив заданный угол по оси.
2. Вариант с цилиндрической линзой (фото 3,4). На отверстие наложена ц. линза, дающая в фокальном плоскости изображение источника в виде щели. Линза самодельная, изготовлена много лет назад из оргстекла (срезал ножовкой сегмент от боковой поверхности кругляка и заполировал). На экране видна яркая полоска от Солнца. Остальная часть кадра затенена, что позволяет выбрать усиление для линейки.
Xan> Невозможно сделать достаточно узкую щель, чтоб не перегрузить фотодиоды.
Xan> Думаю сделать камеру-обскуру, а на зайчик, который в ней получится, будет смотреть коробочка с линейкой и щелью.
Вот возможные технические решения для твоей задачи. Без всякого hightech. Камера-оскура из пробки для труб PVC от обьектива теодолита и державка с молочным стеклом, как экран или ослабитель потока.
1. Вариант с маской. (фото 1,2) На отверстие к.о. наклеен обьект нужной ширины (ширина выбирается в зависимости от чувств. приёмника. На экране видна тёмная полоска в окружении светлых сегментов. В данном случае линейка CCD регистрирует "провал" от тени. Меньше проблем с засветкой, однако нужно поэкспериментировать с размерами, чтобы тень не сошла с линейки, обеспечив заданный угол по оси.
2. Вариант с цилиндрической линзой (фото 3,4). На отверстие наложена ц. линза, дающая в фокальном плоскости изображение источника в виде щели. Линза самодельная, изготовлена много лет назад из оргстекла (срезал ножовкой сегмент от боковой поверхности кругляка и заполировал). На экране видна яркая полоска от Солнца. Остальная часть кадра затенена, что позволяет выбрать усиление для линейки.
Прикреплённые файлы:




Это сообщение редактировалось 21.08.2013 в 00:06
a_centaurus> Вот возможные технические решения для твоей задачи.
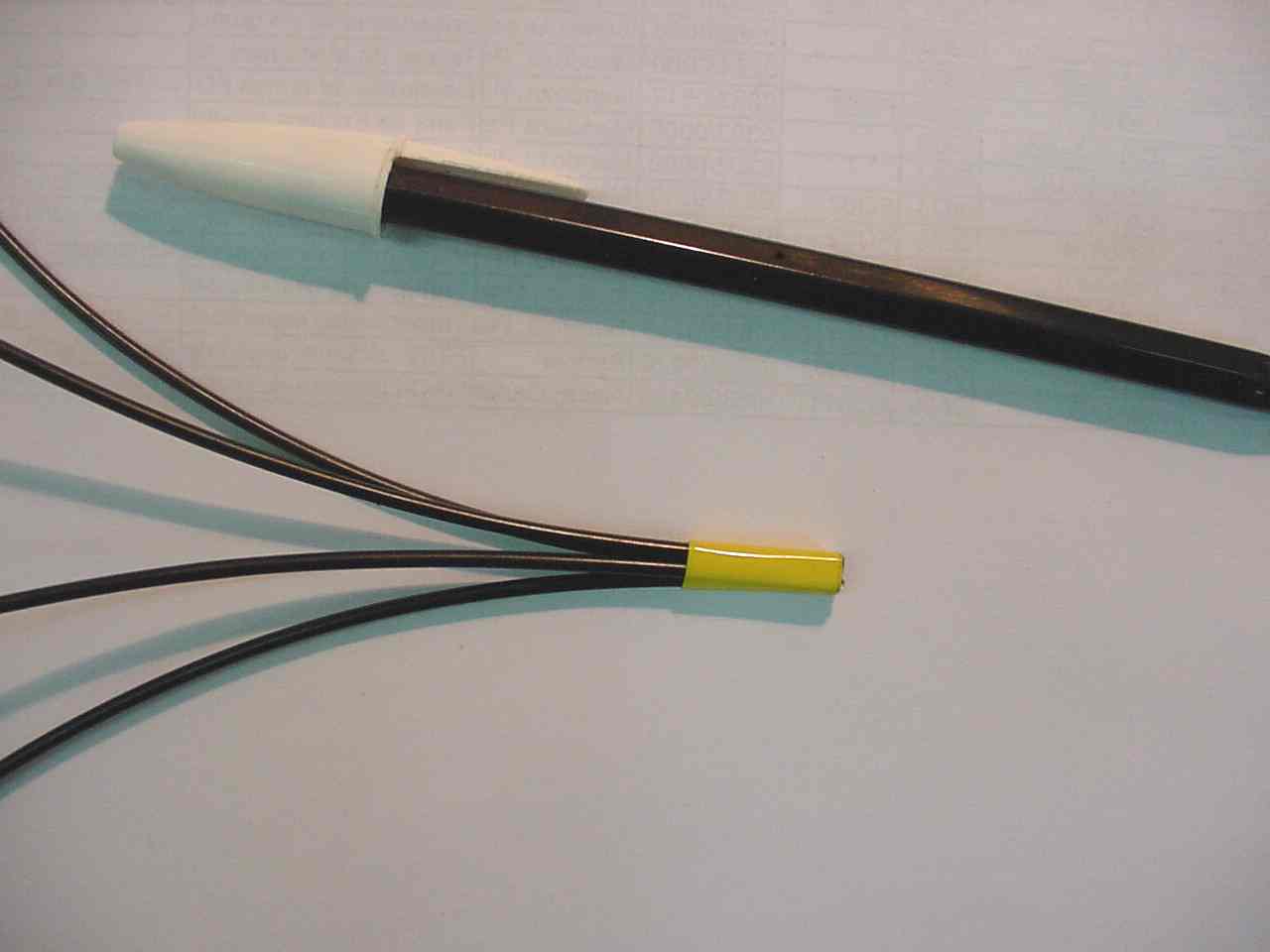
3. Вариант со световодом (фото 5,6). Каждый световод (полимерный с. диам. 1 мм) , на входе собирает излучение в угле примерно 60°, а на выходе даёт освещённость чувствительной площадки приёмника в функции угла наклона. Если соберёшь 4 таких с. в матрицу-"паук" на выходе с разведением вверху под необходимыми углами, то сможешь контролировать обьект по тангажу и р. одновременно, по простому изменению освещённости как ф. соответствующего угла. Причём по ± осям. Можно использовать 4 секторный фотодиод. Или ту же линейку ПЗС (4 сектора засветки). Легко контролируется освещённость приёмника, поскольку нейтральный фильтр (тот же пластиковый от очков) можно поставить на выходе перед п.
3. Вариант со световодом (фото 5,6). Каждый световод (полимерный с. диам. 1 мм) , на входе собирает излучение в угле примерно 60°, а на выходе даёт освещённость чувствительной площадки приёмника в функции угла наклона. Если соберёшь 4 таких с. в матрицу-"паук" на выходе с разведением вверху под необходимыми углами, то сможешь контролировать обьект по тангажу и р. одновременно, по простому изменению освещённости как ф. соответствующего угла. Причём по ± осям. Можно использовать 4 секторный фотодиод. Или ту же линейку ПЗС (4 сектора засветки). Легко контролируется освещённость приёмника, поскольку нейтральный фильтр (тот же пластиковый от очков) можно поставить на выходе перед п.
Прикреплённые файлы:

Это сообщение редактировалось 21.08.2013 в 00:17
Deja vu однако... Кругами ходим, хе-хе...
a_centaurus> Вот возможные технические решения для твоей задачи. Без всякого hightech.
Да вот я тоже так же думал. Именно как на первой картинке.
Ровную узкую щель сделать трудно, поэтому думал применить цилиндрическую затенялку.
Почитал даташит на купленную линейку. Получается, что её можно совать прямо на солнце без каких-либо фильтров/ослабителей. Так что конструкция получается совсем простой.
Да вот я тоже так же думал. Именно как на первой картинке.
Ровную узкую щель сделать трудно, поэтому думал применить цилиндрическую затенялку.
Почитал даташит на купленную линейку. Получается, что её можно совать прямо на солнце без каких-либо фильтров/ослабителей. Так что конструкция получается совсем простой.
Не будешь перепокупать? Ресурсы ЦП позволяют всю линейку принимать, без обрезки?
Xan> Почитал даташит на купленную линейку. Получается, что её можно совать прямо на солнце без каких-либо фильтров/ослабителей. Так что конструкция получается совсем простой.
В промышленном исполнении сенсоры CCD поставляются без защитного стекла. Чтобы избежать влияния фона рассеянного света.
В твоём случае можно попробовать конструкцию с блендой, ограничивающей поле зрение кам.-о. Конусной или просто цилиндрической. Это поможет поднять уровень сигнал/шума. Собственно, поэтому волоконные датчики лучше работают в условиях сильной засветки. Волокно - самодостаточная О.С.
В промышленном исполнении сенсоры CCD поставляются без защитного стекла. Чтобы избежать влияния фона рассеянного света.
В твоём случае можно попробовать конструкцию с блендой, ограничивающей поле зрение кам.-о. Конусной или просто цилиндрической. Это поможет поднять уровень сигнал/шума. Собственно, поэтому волоконные датчики лучше работают в условиях сильной засветки. Волокно - самодостаточная О.С.
Non-conformist> Не будешь перепокупать? Ресурсы ЦП позволяют всю линейку принимать, без обрезки?
Да я сначала в даташитах блуждал — искал допустимый (сверху) диапазон света, они все очень чувствительные — "300 фотоэлектронов младший разряд АЦП".
Пока не разобрался достаточно.
Было несколько кандидатов, у всех разное, явного лидера на было.
И, похоже, при заказе промахнулся строчкой.
Но как оказалось — правильно промахнулся.")
У купленной время экспозиции можно укрутить аж до долей мкс. А теоретически надо порядка 50 мкс. Так что всё хорошо, запас во все стороны большой.
Данные в МК можно засосать примерно за 700 мкс.
Со всех сторон всего хватает.
Ща я ещё с математикой гироскопов разберусь и наступит щястие!
Да я сначала в даташитах блуждал — искал допустимый (сверху) диапазон света, они все очень чувствительные — "300 фотоэлектронов младший разряд АЦП".
Пока не разобрался достаточно.
Было несколько кандидатов, у всех разное, явного лидера на было.
И, похоже, при заказе промахнулся строчкой.
Но как оказалось — правильно промахнулся.
У купленной время экспозиции можно укрутить аж до долей мкс. А теоретически надо порядка 50 мкс. Так что всё хорошо, запас во все стороны большой.
Данные в МК можно засосать примерно за 700 мкс.
Со всех сторон всего хватает.
Ща я ещё с математикой гироскопов разберусь и наступит щястие!
a_centaurus> В твоём случае можно попробовать конструкцию с блендой, ограничивающей поле зрение кам.-о.
Не, не надо бленды.
Солнце даёт света больше, чем всё остальное. Так что фон не будет большим.
Ну и я уже в другом проекте натренировался программно искать и измерять импульсы в последовательности грязных данных.
Не, не надо бленды.
Солнце даёт света больше, чем всё остальное. Так что фон не будет большим.
Ну и я уже в другом проекте натренировался программно искать и измерять импульсы в последовательности грязных данных.
Xan> Не, не надо бленды.
Xan> Солнце даёт света больше, чем всё остальное. Так что фон не будет большим.
Датчик ведь работает в динамическом диапазоне:темновой сигнал - сатурация (примерно 5 порядков). И поиск источника (Солнца) он будет делать на фоне неба. А его (неба) яркость очень высокая. На два-три порядка всего ниже солнечной. Которая должна вообще-то насыщать силиконовый приёмник. Поэтому CCD будет иметь очень небольшой запас по динамике. А время обработки сигнала - около 20 мс (так?). То есть, за это время ракета успеет пролететь достаточно большое расстояние и, возможно, выйти за сектор возможного контроля курса. Но, дело хозяйское... Это я так, к слову. Можешь не отвечать.
Xan> Солнце даёт света больше, чем всё остальное. Так что фон не будет большим.
Датчик ведь работает в динамическом диапазоне:темновой сигнал - сатурация (примерно 5 порядков). И поиск источника (Солнца) он будет делать на фоне неба. А его (неба) яркость очень высокая. На два-три порядка всего ниже солнечной. Которая должна вообще-то насыщать силиконовый приёмник. Поэтому CCD будет иметь очень небольшой запас по динамике. А время обработки сигнала - около 20 мс (так?). То есть, за это время ракета успеет пролететь достаточно большое расстояние и, возможно, выйти за сектор возможного контроля курса. Но, дело хозяйское... Это я так, к слову. Можешь не отвечать.
a_centaurus> А его (неба) яркость очень высокая. На два-три порядка всего ниже солнечной.
Ну так я же само солнце ловлю, у него яркость превышает все остальные.
Ну и атмосферы у меня будет мало. Облаков точно не будет.
Фотоклассика: в тени освещённость в 4 раза меньше, чем на прямом солнце.
a_centaurus> Которая должна вообще-то насыщать силиконовый приёмник.
Ну вот вроде, если я правильно понял даташит, можно сделать режим, когда солнце насыщать не будет, всё будет измеряться в линейном режиме.
Даже если линейку просто осветить прямым солнцем.
Полный цикл измерения меньше миллисекунды.
Экспозиция при этом десятки микросекунд.
В основном время уходит на высасывание цифровых данных из линейки.
Ну так я же само солнце ловлю, у него яркость превышает все остальные.
Ну и атмосферы у меня будет мало.
Облаков точно не будет.Фотоклассика: в тени освещённость в 4 раза меньше, чем на прямом солнце.
a_centaurus> Которая должна вообще-то насыщать силиконовый приёмник.
Ну вот вроде, если я правильно понял даташит, можно сделать режим, когда солнце насыщать не будет, всё будет измеряться в линейном режиме.
Даже если линейку просто осветить прямым солнцем.
Полный цикл измерения меньше миллисекунды.
Экспозиция при этом десятки микросекунд.
В основном время уходит на высасывание цифровых данных из линейки.
 Бывший генералиссимус
Бывший генералиссимус

Xan> Ща я ещё с математикой гироскопов разберусь и наступит щястие!
Разберёшься - поделись! Мне тоже интересно! Я под это дело макет на ADuC7126 зафигачил - но пока ещё программировать не начинал. А то у ADXRS646 выход аналоговый, пусть тогда встроенный 12-битный АЦП их оцифровывает. Буду делать с 16-кратной передискретизацией.
А остальные методы управления здесь немного оффтопик
Разберёшься - поделись! Мне тоже интересно! Я под это дело макет на ADuC7126 зафигачил - но пока ещё программировать не начинал. А то у ADXRS646 выход аналоговый, пусть тогда встроенный 12-битный АЦП их оцифровывает. Буду делать с 16-кратной передискретизацией.
А остальные методы управления здесь немного оффтопик
Xan> Фотоклассика: в тени освещённость в 4 раза меньше, чем на прямом солнце.
Это не фотосьёмка на горизонтальной поверхности. Это зенитная фоторадиометрия. Твой сенсор всегда будет видеть небо. Даже в тени. Ты же его для этого используешь.
Xan> Ну и атмосферы у меня будет мало. Облаков точно не будет.
Я плохо понимаю, значит, логику работы твоего датчика. В вариантах "больших" сенсоров, солнечный датчик (с широкоугольной оптикой) вращают вместе с платформой (спутниковой), пока он не "захватит" светило. Потом делает переход на другой канал - узкоугольный и оптимизацию по чувствительности. А как это произойдёт в твоей системе (на ракете!!!). Камера-о. имеет ведь ограниченное поле зрения. Если на стартовой позиции, тогда ещё можно как-то (весьма сложно, поскольку нужно иметь канал подстройки, выведенный на панель борта или пульт) пытаться поймать Солнце (блокируя при этом (рукой?) засветки и блики от корпусных деталей. Бленды-то нет) вслепую . Если нет атмосферы, (полёт ракеты на сверхзвуке!) тогда это уже автоматический режим поиска источника в 0.5° (практически точечного) на фоне чёрного неба. Ещё сложнее. Сигнал от источника становится острым. И одноосная линейка его не захватит. Извини, но это азы оптической навигации.
Это не фотосьёмка на горизонтальной поверхности. Это зенитная фоторадиометрия. Твой сенсор всегда будет видеть небо. Даже в тени. Ты же его для этого используешь.
Xan> Ну и атмосферы у меня будет мало.
Облаков точно не будет.Я плохо понимаю, значит, логику работы твоего датчика. В вариантах "больших" сенсоров, солнечный датчик (с широкоугольной оптикой) вращают вместе с платформой (спутниковой), пока он не "захватит" светило. Потом делает переход на другой канал - узкоугольный и оптимизацию по чувствительности. А как это произойдёт в твоей системе (на ракете!!!). Камера-о. имеет ведь ограниченное поле зрения. Если на стартовой позиции, тогда ещё можно как-то (весьма сложно, поскольку нужно иметь канал подстройки, выведенный на панель борта или пульт) пытаться поймать Солнце (блокируя при этом (рукой?) засветки и блики от корпусных деталей. Бленды-то нет) вслепую . Если нет атмосферы, (полёт ракеты на сверхзвуке!) тогда это уже автоматический режим поиска источника в 0.5° (практически точечного) на фоне чёрного неба. Ещё сложнее. Сигнал от источника становится острым. И одноосная линейка его не захватит. Извини, но это азы оптической навигации.
Б.г.> А остальные методы управления здесь немного оффтопик
Sorry! Я и сам чувствую, что завяз в офф-топном обсуждении ОПТИЧЕСКОГО датчика. За сим, прекращаю. Вроде у нас нету ветки обсуждения оптических средств навигации, кроме ОДА?
Sorry! Я и сам чувствую, что завяз в офф-топном обсуждении ОПТИЧЕСКОГО датчика. За сим, прекращаю. Вроде у нас нету ветки обсуждения оптических средств навигации, кроме ОДА?
Xan>> Фотоклассика: в тени освещённость в 4 раза меньше, чем на прямом солнце.
a_centaurus> Это не фотосьёмка на горизонтальной поверхности.
Я к тому, что поток света от неба в несколько раз меньше, чем от солнца.
a_centaurus> Я плохо понимаю, значит, логику работы твоего датчика.
Это будет широкоугольный датчик, ±45 градусов.
Линейка длиной 8.5 мм, на высоте 4 мм над ней будет или щель, или проволока (тень бросать).
Шаг между диодами соответствует углу 1/50 радиана. Программно планирую ещё порядок выжать.
Если не получится, буду делать меньший угол.
Вообще, чтоб попасть на орбиту, вполне достаточно точности выведения в 1 процент.
Предположительно ракету надо пускать ранним утром, тогда угол на солнце во время разгона будет меняться немного, можно уложиться градусов в десять (±5).
a_centaurus> Я и сам чувствую, что завяз в офф-топном обсуждении ОПТИЧЕСКОГО датчика.
Ну я это оффтопом не считаю, потому что оптикой и магнитным полем можно и нужно корректировать дрейф гироскопов.
a_centaurus> Это не фотосьёмка на горизонтальной поверхности.
Я к тому, что поток света от неба в несколько раз меньше, чем от солнца.
a_centaurus> Я плохо понимаю, значит, логику работы твоего датчика.
Это будет широкоугольный датчик, ±45 градусов.
Линейка длиной 8.5 мм, на высоте 4 мм над ней будет или щель, или проволока (тень бросать).
Шаг между диодами соответствует углу 1/50 радиана. Программно планирую ещё порядок выжать.
Если не получится, буду делать меньший угол.
Вообще, чтоб попасть на орбиту, вполне достаточно точности выведения в 1 процент.
Предположительно ракету надо пускать ранним утром, тогда угол на солнце во время разгона будет меняться немного, можно уложиться градусов в десять (±5).
a_centaurus> Я и сам чувствую, что завяз в офф-топном обсуждении ОПТИЧЕСКОГО датчика.
Ну я это оффтопом не считаю, потому что оптикой и магнитным полем можно и нужно корректировать дрейф гироскопов.
Б.г.> Разберёшься - поделись!
Ну вот, проверяй, критикуй:
Как и положено в случае, когда техник лезет в математику, надо принять за аксиому какую-нибудь лютую бредятину, очевидно противоречащую математике.
В данном случае это будет аксиома, что повороты коммутативны.
Экспериментальная проверка на логарифмической линейке показывает, что на малых углах это выполняется с большой точностью, значит это действительно так, а математики опять ошибаются!!!
Обозначим большими буквами единичные векторы, параллельные осям гироскопов: X, Y, Z.
(В МК это будут девять 16-битных чисел с фиксированной точкой.)
Гироскопы выдают угловые скорости: wx, wy, wz.
Углы, на которые повернулись гироскопы за очередной квант времени dt:
x = Mx * wx * dt
y = My * wy * dt
z = Mz * wz * dt
(Mi — коэффициент для правильного масштаба)
Вот берём z-гиро, он поворачивает векторы X и Y.
Чтоб повернуть вектор X, надо его немного укоротить, умножив на косинус угла поворота, и, чтоб изменить направление, надо прибавить к нему перпендикулярный ему вектор.
В качестве такого вектора можно использовать вектор Y, умноженный на синус угла поворота, он (Y) как раз единичный и перпендикулярный.
Аналогично и для вектора Y, только у него синус с минусом будет.
Вот в векторной форме:
X_new = cos(x) * X + sin(x) * Y
Y_new =-sin(x) * X + cos(x) * Y
Аналогично и для двух других гироскопов.
В результате трёх поворотов получится такое:
Всё, получилась новая ориентация ракеты.
Чтоб направить ось ракеты в нужную сторону, надо вектор должного направления из программы полёта векторно умножить на вектор Z. Получится вектор, вокруг которого надо вращать ракету, чтоб она стала правильно ориентированной.
Если этот вектор скалярно умножить на X и Y, то получатся две величины, которые надо прямо подавать в управлялки тангажом и курсом.
Это всё работает независимо от текущего крена.
Может оно и громоздко, но лично мне в этом всё кристально ясно.
И никаких складываний рамок.
И наверняка это всё открыто ещё до меня, в шестнадцатом веке.
Ну, за счёт дискретности арифметики векторы гироскопов будут стараться стать взаимно неперпендикулярными и не единичными. Это надо будет временами подправлять.
А косинусы и синусы можно либо брать из таблицы, либо считать из рядов:
cos(x) = 1 - x2 / 2
sin(x) = x - x3 / 6
Ну вот, проверяй, критикуй:
Как и положено в случае, когда техник лезет в математику, надо принять за аксиому какую-нибудь лютую бредятину, очевидно противоречащую математике.
В данном случае это будет аксиома, что повороты коммутативны.
Экспериментальная проверка на логарифмической линейке показывает, что на малых углах это выполняется с большой точностью, значит это действительно так, а математики опять ошибаются!!!
Обозначим большими буквами единичные векторы, параллельные осям гироскопов: X, Y, Z.
(В МК это будут девять 16-битных чисел с фиксированной точкой.)
Гироскопы выдают угловые скорости: wx, wy, wz.
Углы, на которые повернулись гироскопы за очередной квант времени dt:
x = Mx * wx * dt
y = My * wy * dt
z = Mz * wz * dt
(Mi — коэффициент для правильного масштаба)
Вот берём z-гиро, он поворачивает векторы X и Y.
Чтоб повернуть вектор X, надо его немного укоротить, умножив на косинус угла поворота, и, чтоб изменить направление, надо прибавить к нему перпендикулярный ему вектор.
В качестве такого вектора можно использовать вектор Y, умноженный на синус угла поворота, он (Y) как раз единичный и перпендикулярный.
Аналогично и для вектора Y, только у него синус с минусом будет.
Вот в векторной форме:
X_new = cos(x) * X + sin(x) * Y
Y_new =-sin(x) * X + cos(x) * Y
Аналогично и для двух других гироскопов.
В результате трёх поворотов получится такое:
code text
- X_new = cos(y)*cos(z) * X + sin(z) * Y - sin(y) * Z
- Y_new = -sin(z) * X + cos(x)*cos(z) * Y + sin(x) * Z
- Z_new = sin(y) * X - sin(x) * Y + cos(x)*cos(y) * Z
Всё, получилась новая ориентация ракеты.
Чтоб направить ось ракеты в нужную сторону, надо вектор должного направления из программы полёта векторно умножить на вектор Z. Получится вектор, вокруг которого надо вращать ракету, чтоб она стала правильно ориентированной.
Если этот вектор скалярно умножить на X и Y, то получатся две величины, которые надо прямо подавать в управлялки тангажом и курсом.
Это всё работает независимо от текущего крена.
Может оно и громоздко, но лично мне в этом всё кристально ясно.
И никаких складываний рамок.
И наверняка это всё открыто ещё до меня, в шестнадцатом веке.
Ну, за счёт дискретности арифметики векторы гироскопов будут стараться стать взаимно неперпендикулярными и не единичными. Это надо будет временами подправлять.
А косинусы и синусы можно либо брать из таблицы, либо считать из рядов:
cos(x) = 1 - x2 / 2
sin(x) = x - x3 / 6
Б.г.>> Разберёшься - поделись!
Xan> Ну вот, проверяй, критикуй:
Какой ты считаешь предельную скорость закрутки по крену? Момент инерции по крену маленький, скорость может быть большой. Тем более, что аэродинамическое демпфирование тоже маленькое.
Xan> В данном случае это будет аксиома, что повороты коммутативны.
Xan> Экспериментальная проверка на логарифмической линейке показывает, что на малых углах это выполняется с большой точностью, значит это действительно так, а математики опять ошибаются!!!
Покуда синус не отличается от икс минус икс в кубе на шесть, может, и правда, коммутативны
Я тоже сторонник работы в областях малых углов и квазилинейного приближения, но оно работает только при малости угловых скоростей по всем трём осям. Вопрос - совместима ли эта малость угловых скоростей с терминальным управлением? мне кажется, нет. При этом я знаю, что у какой-то из американских лодочных ракет не было управления по крену на какой-то из ступеней - ей дозволялось крутиться как угодно...
Xan> Ну вот, проверяй, критикуй:
Какой ты считаешь предельную скорость закрутки по крену? Момент инерции по крену маленький, скорость может быть большой. Тем более, что аэродинамическое демпфирование тоже маленькое.
Xan> В данном случае это будет аксиома, что повороты коммутативны.
Xan> Экспериментальная проверка на логарифмической линейке показывает, что на малых углах это выполняется с большой точностью, значит это действительно так, а математики опять ошибаются!!!
Покуда синус не отличается от икс минус икс в кубе на шесть, может, и правда, коммутативны
Я тоже сторонник работы в областях малых углов и квазилинейного приближения, но оно работает только при малости угловых скоростей по всем трём осям. Вопрос - совместима ли эта малость угловых скоростей с терминальным управлением? мне кажется, нет. При этом я знаю, что у какой-то из американских лодочных ракет не было управления по крену на какой-то из ступеней - ей дозволялось крутиться как угодно...


Xan> мне в этом всё кристально ясно.
Будем обязательно обсуждать.
Во всяком случае, синусы и косинусы, конечно, без тригонометрии считаются,
там еще и логику надо использовать, ибо вычисления ограничены ±45-ю градусами, далее с рядом Тейлора лучше не связываться.
Вызывает сомнение тезис о коммутативности малых поворотов. 50 малых поворотов - это один большой.
Также (у меня) чешется за лысиной по поводу ухода гироскопов за время, бОльшее единиц секунд. Если мы работаем с малыми углами за малые промежутки времени, то рано или поздно случайное значение "блуда" (не "шума" !) превысит полезное приращение. Правда, с этим можно хоть как-то "воевать", заранее измерив статистику "блуда" индивидуально по каждому из каналов.
Самый правильный путь проверки на "кристальность" - это сравнение "классической" матрицы поворота (а-ля "направляющие косинусы") и представленной "упрощенной" матрицы.
Чем и займусь на досуге, с наглядными картинками.
Будем обязательно обсуждать.
Во всяком случае, синусы и косинусы, конечно, без тригонометрии считаются,
там еще и логику надо использовать, ибо вычисления ограничены ±45-ю градусами, далее с рядом Тейлора лучше не связываться.
Вызывает сомнение тезис о коммутативности малых поворотов. 50 малых поворотов - это один большой.
Также (у меня) чешется за лысиной по поводу ухода гироскопов за время, бОльшее единиц секунд. Если мы работаем с малыми углами за малые промежутки времени, то рано или поздно случайное значение "блуда" (не "шума" !) превысит полезное приращение. Правда, с этим можно хоть как-то "воевать", заранее измерив статистику "блуда" индивидуально по каждому из каналов.
Самый правильный путь проверки на "кристальность" - это сравнение "классической" матрицы поворота (а-ля "направляющие косинусы") и представленной "упрощенной" матрицы.
Чем и займусь на досуге, с наглядными картинками.
Ckona> там еще и логику надо использовать, ибо вычисления ограничены ±45-ю градусами,
Весь программный разворот по тангажу легко может превысить 90 градусов.
И это надо всегда помнить и учитывать.
Хотя у меня в законе выведения первая ступень крутится только до 41, дальше во время баллистической паузы (пассивного полёта), но хрен редьки не слаще. Чем больше мы успеваем пролететь за время активного участка, тем больше приходится крутануть ракету по тангажу. К сожалению, в Ратмановском спредшите Земля плоская, и этого не видно, а по факту вершина траектории первой ступени отстоит от старта на три градуса дуги большого круга.
Весь программный разворот по тангажу легко может превысить 90 градусов.
И это надо всегда помнить и учитывать.
Хотя у меня в законе выведения первая ступень крутится только до 41, дальше во время баллистической паузы (пассивного полёта), но хрен редьки не слаще. Чем больше мы успеваем пролететь за время активного участка, тем больше приходится крутануть ракету по тангажу. К сожалению, в Ратмановском спредшите Земля плоская, и этого не видно, а по факту вершина траектории первой ступени отстоит от старта на три градуса дуги большого круга.
Б.г.> Какой ты считаешь предельную скорость закрутки по крену? Момент инерции по крену маленький, скорость может быть большой. Тем более, что аэродинамическое демпфирование тоже маленькое.
Для планируемой микрухи предельная скорость 2000 градусов в секунду.
Это какая-то совсем дикая скорость, разве что при стабилизации вращением достижимая.
А так-то я планирую крен жёстко поддерживать нулевой (по отношению к солнцу). Скорость у него будет совсем маленькая.
Б.г.> Покуда синус не отличается от икс минус икс в кубе на шесть, может, и правда, коммутативны
При частоте отсчётов 400 получится максимум 5 градусов за квант. Можно сделать частоту 800.
Б.г.> Я тоже сторонник работы в областях малых углов и квазилинейного приближения, но оно работает только при малости угловых скоростей по всем трём осям.
Ну так если скорость мозгов большая, то малые углы и получатся. Несмотря на большие скорости.
Б.г.> Вопрос - совместима ли эта малость угловых скоростей с терминальным управлением? мне кажется, нет.
Почему?
Надо поддерживать углы не сильно отклонёнными, чтоб вектор скорости рос в нужном направлении. А близость движения к "расчётной траектории" не нужна.
Не вижу проблемы.
Для планируемой микрухи предельная скорость 2000 градусов в секунду.
Это какая-то совсем дикая скорость, разве что при стабилизации вращением достижимая.
А так-то я планирую крен жёстко поддерживать нулевой (по отношению к солнцу). Скорость у него будет совсем маленькая.
Б.г.> Покуда синус не отличается от икс минус икс в кубе на шесть, может, и правда, коммутативны
При частоте отсчётов 400 получится максимум 5 градусов за квант. Можно сделать частоту 800.
Б.г.> Я тоже сторонник работы в областях малых углов и квазилинейного приближения, но оно работает только при малости угловых скоростей по всем трём осям.
Ну так если скорость мозгов большая, то малые углы и получатся. Несмотря на большие скорости.
Б.г.> Вопрос - совместима ли эта малость угловых скоростей с терминальным управлением? мне кажется, нет.
Почему?
Надо поддерживать углы не сильно отклонёнными, чтоб вектор скорости рос в нужном направлении. А близость движения к "расчётной траектории" не нужна.
Не вижу проблемы.
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
