-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
 Андрей Суворов
Андрей Суворов

Ну, раз дело дошло до этого, открою-ка я эту тему.
Мои первые эксперименты с твердотельными гироскопами велись с мюратовскими ENC-03, которые стоят в большинстве видеокамер со стабилизацией изображения. В каждой камере стоит два гироскопа, т.к. нету способа стабилизировать поворот вокруг оптической оси")
Это одни из самых дешёвых пьезогироскопов в мире, они дешевле и аналог-девайсовских, и эпсоновских, и тех, что используются для авиамоделей (футаба и т.д.)
Это классические датчики угловой скорости, для получения информации об ориентации сигнал нужно интегрировать, и определяющим является накопление ошибки в процессе интегрирования.
Я использовал вначале АЦП AD7710 в 16-битном режиме, и испытывал разные алгоритмы определения нуля угловой скорости. Результаты неутешительны. Если брать полную шкалу в 300 градусов в секунду за 30000 (-300 градусов в секунду должны соответствовать -30000, остальное - запас на нелинейность, перегрузку и т.д), то один квант шкалы соответствует 0,01 градуса в секунду, и ошибка определения нуля всего в один квант приводит к уходу на 0,6 градуса в минуту.
Фактически, с использованием встроенного опорника в 2,5 вольта и к.у. 8, обеспечиваемого внутренней структурой этого АЦП, квант получался в 1,5 раза больше, и, соответственно, уход при ошибке определения нуля в 1 квант составлял градус в минуту.
Обычно ошибка составляла 0..3 кванта, причём, ни один применённый алгоритм не обеспечивал лучшего определения этого самого нуля.
Для ракеты, у которой время работы двигателя не превышает этой самой минуты, всё довольно точно - градус ошибки, это 1% бокового смещения, но для более длительной навигации это неприемлемо.
Несколько смягчить проблему можно использованием 2-4 гироскопов в параллель на каждую ось (даже 2 ENC-03 дешевле, чем один ADXRS613) и усреднением данных с них. Это уменьшает все ошибки в 1,4 раза при сохранении полосы пропускания.
Мои первые эксперименты с твердотельными гироскопами велись с мюратовскими ENC-03, которые стоят в большинстве видеокамер со стабилизацией изображения. В каждой камере стоит два гироскопа, т.к. нету способа стабилизировать поворот вокруг оптической оси
Это одни из самых дешёвых пьезогироскопов в мире, они дешевле и аналог-девайсовских, и эпсоновских, и тех, что используются для авиамоделей (футаба и т.д.)
Это классические датчики угловой скорости, для получения информации об ориентации сигнал нужно интегрировать, и определяющим является накопление ошибки в процессе интегрирования.
Я использовал вначале АЦП AD7710 в 16-битном режиме, и испытывал разные алгоритмы определения нуля угловой скорости. Результаты неутешительны. Если брать полную шкалу в 300 градусов в секунду за 30000 (-300 градусов в секунду должны соответствовать -30000, остальное - запас на нелинейность, перегрузку и т.д), то один квант шкалы соответствует 0,01 градуса в секунду, и ошибка определения нуля всего в один квант приводит к уходу на 0,6 градуса в минуту.
Фактически, с использованием встроенного опорника в 2,5 вольта и к.у. 8, обеспечиваемого внутренней структурой этого АЦП, квант получался в 1,5 раза больше, и, соответственно, уход при ошибке определения нуля в 1 квант составлял градус в минуту.
Обычно ошибка составляла 0..3 кванта, причём, ни один применённый алгоритм не обеспечивал лучшего определения этого самого нуля.
Для ракеты, у которой время работы двигателя не превышает этой самой минуты, всё довольно точно - градус ошибки, это 1% бокового смещения, но для более длительной навигации это неприемлемо.
Несколько смягчить проблему можно использованием 2-4 гироскопов в параллель на каждую ось (даже 2 ENC-03 дешевле, чем один ADXRS613) и усреднением данных с них. Это уменьшает все ошибки в 1,4 раза при сохранении полосы пропускания.


 инфо
инфо инструменты
инструменты Serge77
Serge77

А.С.> (даже 2 ENC-03 дешевле, чем один ADXRS613)
У нас они стоят одинаково, по $33. А у вас?
У нас они стоят одинаково, по $33. А у вас?

 Xan
Xan

А.С.> уход при ошибке определения нуля в 1 квант составлял градус в минуту.
Больше разрядов - и можно это победить. Для ADXRS613 в идеале обещают 0.3 градуса в минуту - это среднеквадратичный.
Ну и там ещё есть Linear Acceleration Effect (= 0.1 °/s/g для ADXRS613), при изменении скорости на 300 м/с, уход угла сразу будет 3 градуса (типичная величина).
AD пытаются его компенсировать в своих блоках ADIS16355, но не очень успешно, всего в два раза.
Тем не менее, для недолго летающих игрушечных ракет это самое надёжное. И простое, в смысле наладки. ИМХО.
Дальше, конечно, остаётся оптика и магнитное поле.
Если использовать солнце и поле, надо, чтоб угол между ними был побольше - значит хорошо будет утром, вечером и летом, а днём зимой плохо.
Но если для магнитного поля достаточно просто поставить три датчика, то с датчиком солнца как-то непонятно - толи он должен поворачиваться за солнцем, толи нужно ставить множество датчиков по поверхности сферы.
Похоже, с датчиком солнца не обойтись без управления по крену - тогда можно сделать достаточно узконаправленную оптику. Даже если ракета временно потеряет солнце, она может по гироскопам снова развернуть датчик к солнцу, а когда поймает - подкрутить ноль гироскопам.
ЗЫ.
Как насчёт n-prize?
Это, конечно, полный оффтоп для этого форума. Потому что не модель.
Больше разрядов - и можно это победить. Для ADXRS613 в идеале обещают 0.3 градуса в минуту - это среднеквадратичный.
Ну и там ещё есть Linear Acceleration Effect (= 0.1 °/s/g для ADXRS613), при изменении скорости на 300 м/с, уход угла сразу будет 3 градуса (типичная величина).
AD пытаются его компенсировать в своих блоках ADIS16355, но не очень успешно, всего в два раза.
Тем не менее, для недолго летающих игрушечных ракет это самое надёжное. И простое, в смысле наладки. ИМХО.
Дальше, конечно, остаётся оптика и магнитное поле.
Если использовать солнце и поле, надо, чтоб угол между ними был побольше - значит хорошо будет утром, вечером и летом, а днём зимой плохо.
Но если для магнитного поля достаточно просто поставить три датчика, то с датчиком солнца как-то непонятно - толи он должен поворачиваться за солнцем, толи нужно ставить множество датчиков по поверхности сферы.
Похоже, с датчиком солнца не обойтись без управления по крену - тогда можно сделать достаточно узконаправленную оптику. Даже если ракета временно потеряет солнце, она может по гироскопам снова развернуть датчик к солнцу, а когда поймает - подкрутить ноль гироскопам.
ЗЫ.
Как насчёт n-prize?
Это, конечно, полный оффтоп для этого форума. Потому что не модель.

Так для навигации надо их постоянно уточнять через независимое измерение угла. По ИК горизонту, например. Тогда ими можно пользоваться. Или, да, в краткосрочном управлении - хотя кажется радиоуправляемые ракеты (ракеты с системой стабилизации в принципе тоже можно под это подвести - это ж чистая КР получается ") ) запрещены?
) запрещены?
Я бы по другому сделал, если нужна стабилизация. Есть двухкоординатные акселерометры. Стоят какие-то копейки - что-то около 400 рублей 5G версия. Ставим их на поперечные каналы и обнуляем по ним соответствующие ускорения. А если бокового ускорения нет - ракета летит по прямой или около того. Ну, это в медленном канале. А в быстром - или по угловой скорости, или пассивная стабилизация.
) запрещены? Я бы по другому сделал, если нужна стабилизация. Есть двухкоординатные акселерометры. Стоят какие-то копейки - что-то около 400 рублей 5G версия. Ставим их на поперечные каналы и обнуляем по ним соответствующие ускорения. А если бокового ускорения нет - ракета летит по прямой или около того. Ну, это в медленном канале. А в быстром - или по угловой скорости, или пассивная стабилизация.

hcube> Я бы по другому сделал, если нужна стабилизация. Есть двухкоординатные акселерометры. Стоят какие-то копейки - что-то около 400 рублей 5G версия. Ставим их на поперечные каналы и обнуляем по ним соответствующие ускорения. А если бокового ускорения нет - ракета летит по прямой или около того. Ну, это в медленном канале. А в быстром - или по угловой скорости, или пассивная стабилизация.
У них есть Cross Axis Sensitivity, так что продольное ускорение будет влиять на поперечные датчики.
У них есть Cross Axis Sensitivity, так что продольное ускорение будет влиять на поперечные датчики.
А там линейность не важна. Мы же на ноль стабилизируем.
А.С.>> (даже 2 ENC-03 дешевле, чем один ADXRS613)
Serge77> У нас они стоят одинаково, по $33. А у вас?
ENC-03 можно получить в ремонтных центрах по починке бытовой электроники примерно по пять-десять долларов за пару - очень часто бывает, что видеокамеру не чинят, потому что это экономически не оправдано. Но даже в "Чип-и-Дипе" цена на ENC-03 всегда была вдвое меньше, чем на ADXRS150.
Цена на аналог-девайсовские гироскопы в Москве никогда не опускалась ниже 50 баксов за штуку.
У меня есть небольшая коллекция сэмплов от АД, которые я всё никак не решусь применить, т.к. ENC-03 у меня что-то около 30 штук, а этих всех - по штучке. "Кубики" типа ADIS16355 очень хороши, но мне не нравится, что у их акселерометров по всем трём осям одинаковая чувствительность, по поперечным осям нужно 2 же, а по продольной 20 же, но таких у них в номенклатуре нет.
Serge77> У нас они стоят одинаково, по $33. А у вас?
ENC-03 можно получить в ремонтных центрах по починке бытовой электроники примерно по пять-десять долларов за пару - очень часто бывает, что видеокамеру не чинят, потому что это экономически не оправдано. Но даже в "Чип-и-Дипе" цена на ENC-03 всегда была вдвое меньше, чем на ADXRS150.
Цена на аналог-девайсовские гироскопы в Москве никогда не опускалась ниже 50 баксов за штуку.
У меня есть небольшая коллекция сэмплов от АД, которые я всё никак не решусь применить, т.к. ENC-03 у меня что-то около 30 штук, а этих всех - по штучке. "Кубики" типа ADIS16355 очень хороши, но мне не нравится, что у их акселерометров по всем трём осям одинаковая чувствительность, по поперечным осям нужно 2 же, а по продольной 20 же, но таких у них в номенклатуре нет.
А.С.>> уход при ошибке определения нуля в 1 квант составлял градус в минуту.
Xan> Больше разрядов - и можно это победить. Для ADXRS613 в идеале обещают 0.3 градуса в минуту - это среднеквадратичный.
Шумы мешают. Надо ещё полосу зарезать. 10 Гц - это верхний предел разумного.
Xan> Ну и там ещё есть Linear Acceleration Effect (= 0.1 °/s/g для ADXRS613), при изменении скорости на 300 м/с, уход угла сразу будет 3 градуса (типичная величина).
Xan> AD пытаются его компенсировать в своих блоках ADIS16355, но не очень успешно, всего в два раза.
Это тяжело компенсировать в промышленности, а вручную подобрать можно - перебором экземпляров.
Xan> Дальше, конечно, остаётся оптика и магнитное поле.
Датчик мыши с приклеенной линзой от сидирома!

Xan> Похоже, с датчиком солнца не обойтись без управления по крену - тогда можно сделать достаточно узконаправленную оптику. Даже если ракета временно потеряет солнце, она может по гироскопам снова развернуть датчик к солнцу, а когда поймает - подкрутить ноль гироскопам.
Xan> ЗЫ.
Xan> Как насчёт n-prize?
Да, блин, после аварии муфеля я не знаю, как делать припой ПСр40
Xan> Это, конечно, полный оффтоп для этого форума. Потому что не модель.
ну, вообще-то, официальная советская граница для моделей - 80 Н*с...
Xan> Больше разрядов - и можно это победить. Для ADXRS613 в идеале обещают 0.3 градуса в минуту - это среднеквадратичный.
Шумы мешают. Надо ещё полосу зарезать. 10 Гц - это верхний предел разумного.
Xan> Ну и там ещё есть Linear Acceleration Effect (= 0.1 °/s/g для ADXRS613), при изменении скорости на 300 м/с, уход угла сразу будет 3 градуса (типичная величина).
Xan> AD пытаются его компенсировать в своих блоках ADIS16355, но не очень успешно, всего в два раза.
Это тяжело компенсировать в промышленности, а вручную подобрать можно - перебором экземпляров.
Xan> Дальше, конечно, остаётся оптика и магнитное поле.
Датчик мыши с приклеенной линзой от сидирома!
Xan> Похоже, с датчиком солнца не обойтись без управления по крену - тогда можно сделать достаточно узконаправленную оптику. Даже если ракета временно потеряет солнце, она может по гироскопам снова развернуть датчик к солнцу, а когда поймает - подкрутить ноль гироскопам.
Xan> ЗЫ.
Xan> Как насчёт n-prize?
Да, блин, после аварии муфеля я не знаю, как делать припой ПСр40
Xan> Это, конечно, полный оффтоп для этого форума. Потому что не модель.
ну, вообще-то, официальная советская граница для моделей - 80 Н*с...

А.С.> "Кубики" типа ADIS16355 очень хороши, но мне не нравится, что у их акселерометров по всем трём осям одинаковая чувствительность, по поперечным осям нужно 2 же, а по продольной 20 же
Дак 1 акселерометр добавить не проблема.
Дак 1 акселерометр добавить не проблема.
Xan> Это, конечно, полный оффтоп для этого форума. Потому что не модель.
Я уж давно предлагаю переименовать в "Ракето Строительный" - коим он очевидно и является так как ни каких моделей тут не делают а СТРОЯТ, проектируют свои ракеты и ракетные системы.
Я уж давно предлагаю переименовать в "Ракето Строительный" - коим он очевидно и является так как ни каких моделей тут не делают а СТРОЯТ, проектируют свои ракеты и ракетные системы.
А.С.> Датчик мыши с приклеенной линзой от сидирома!
Вот я захотел с сенсором поиграться, купил мышку, раскорябал, скачал доки - оказалось, купленная микруха изображения не даёт, только сразу смещение.
А.С.> Да, блин, после аварии муфеля я не знаю, как делать припой ПСр40
У нас всякий нихром на базаре продают.
Делал шахтную печку под тигель диаметром 3 см, разгонял до 1260 градусов.
Низковольтную, конечно.
Вот я захотел с сенсором поиграться, купил мышку, раскорябал, скачал доки - оказалось, купленная микруха изображения не даёт, только сразу смещение.
А.С.> Да, блин, после аварии муфеля я не знаю, как делать припой ПСр40
У нас всякий нихром на базаре продают.
Делал шахтную печку под тигель диаметром 3 см, разгонял до 1260 градусов.
Низковольтную, конечно.
termostat> Дак 1 акселерометр добавить не проблема.
Так ему придётся в одиночестве работать (при перегрузке больше 10ж) - в кубике мозги зашкалят.
Так ему придётся в одиночестве работать (при перегрузке больше 10ж) - в кубике мозги зашкалят.
А.С.>> Датчик мыши с приклеенной линзой от сидирома!
Xan> Вот я захотел с сенсором поиграться, купил мышку, раскорябал, скачал доки - оказалось, купленная микруха изображения не даёт, только сразу смещение.
Правильный подход в таком случае - не покупать мышки, а попросить всех знакомых сисадминов, чтоб они дохлые мышки переправляли, или, если им не в лом, попросить их расковыривать, и переправлять уже только платы с нужными датчиками, а ненужные - выкидывать.
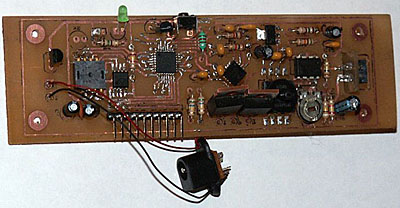
Правда, я хотел уговорить Пиромана сделать код под сенсор (плата, что на снимке, его рук дело) и без изображения - это, в общем, легко обходится предстартовой настройкой - но он сказал, что это, по его мнению, слишком большой геморрой. А так, опять же, у меня валяются около 25 штук PAN101, которые не дают изображения, и всего около 5 сенсоров, которые дают.
А.С.>> Да, блин, после аварии муфеля я не знаю, как делать припой ПСр40
Xan> У нас всякий нихром на базаре продают.
Xan> Делал шахтную печку под тигель диаметром 3 см, разгонял до 1260 градусов.
Xan> Низковольтную, конечно.
Дело не столько в нихроме, сколько в асбесте... Ну не хочу я с ним возиться, а нихром на воздухе максимум до 800 градусов держится...
Собственно, авария потому, видимо, и произошла, что эта печка была уже чинёная - и температура здорово превысила паспортное значение.
Xan> Вот я захотел с сенсором поиграться, купил мышку, раскорябал, скачал доки - оказалось, купленная микруха изображения не даёт, только сразу смещение.
Правильный подход в таком случае - не покупать мышки, а попросить всех знакомых сисадминов, чтоб они дохлые мышки переправляли, или, если им не в лом, попросить их расковыривать, и переправлять уже только платы с нужными датчиками, а ненужные - выкидывать.
Правда, я хотел уговорить Пиромана сделать код под сенсор (плата, что на снимке, его рук дело) и без изображения - это, в общем, легко обходится предстартовой настройкой - но он сказал, что это, по его мнению, слишком большой геморрой. А так, опять же, у меня валяются около 25 штук PAN101, которые не дают изображения, и всего около 5 сенсоров, которые дают.
А.С.>> Да, блин, после аварии муфеля я не знаю, как делать припой ПСр40
Xan> У нас всякий нихром на базаре продают.
Xan> Делал шахтную печку под тигель диаметром 3 см, разгонял до 1260 градусов.
Xan> Низковольтную, конечно.
Дело не столько в нихроме, сколько в асбесте... Ну не хочу я с ним возиться, а нихром на воздухе максимум до 800 градусов держится...
Собственно, авария потому, видимо, и произошла, что эта печка была уже чинёная - и температура здорово превысила паспортное значение.

А.С.> Дело не столько в нихроме, сколько в асбесте... Ну не хочу я с ним возиться, а нихром на воздухе максимум до 800 градусов держится...
От одноразовой возни с асбестом ничего не будет. А при применении простейших средств защиты типа респиратора не будет и при многоразовом. Придумали жупел, понимаете ли.
От одноразовой возни с асбестом ничего не будет. А при применении простейших средств защиты типа респиратора не будет и при многоразовом. Придумали жупел, понимаете ли.
А.С.> Правда, я хотел уговорить Пиромана сделать код под сенсор (плата, что на снимке, его рук дело) и без изображения - это, в общем, легко обходится предстартовой настройкой
Микруха даёт смещение, причём неизвестно, насколько эта штука дрейфует. Надо бы абсолютное значение.
Xan>> Делал шахтную печку под тигель диаметром 3 см, разгонял до 1260 градусов.
А.С.> Дело не столько в нихроме, сколько в асбесте... Ну не хочу я с ним возиться, а нихром на воздухе максимум до 800 градусов держится...
Никакого асбеста.
Ну вот есть "тигель номер 2, высокий" - примерно 25 мм диаметром и 30 высотой (объём 10 см3). Под него делается печка.
Нихром диаметром 1.5 мм наматывается на оправку диаметром 30 мм примерно 30 витков. Когда "пружина" ослабнет, её внутренний диаметр должен получиться около 33 мм, а длина 35...40 мм.
Нихром надо окислить, если он свежий: положить "пружину" горизонтально, слегка растянув, подать вольт 12 (и более), нагреть до красна, следя за замыканиями.
Окисляется только нихром второго сорта, в котором добавлено железо (20%), чистый нихром не окисляется и для такой конструкции непригоден.
Ну вот, на картинке печка из половинки кирпича со щелями. Под спиралью надо сделать ямку, чтоб кирпич не нагревался сильно. В неё будет выплёскиваться содержимое тигля при авариях. Ямка заполняется или окисью магния, или просто мелом (который станет негашёной известью).
Между спиралью и кирпичом согнутая зигзагом нихромовая проволока - подставка под тигель.
Спираль на картинке - сгоревшая, нижнего вывода у неё нет. И вообще покривевшая.
Выводы спирали вставляются в зажимы (там канавки пропилены). К этим же зажимам с другой стороны подводится питание. 24 вольта, 24 ампера. Ребра на зажимах - для понта!
Чтоб спираль держалась вертикально, на неё одевается кварцевая трубка (повезло, нашёл). Думаю, можно из керамики сделать коробочку. Или взять керамические палочки (вертикально) и снаружи железку.
Но ни в коем случае не из асбеста или чего нибудь с силикатным клеем - теплостойкости не хватит!
Пространство между спиралью и коробочкой заполняется окисью магния (или мелом). Снаружи ещё одна коробочка, промежуток заполнен той же окисью.
Итого, излучение улетает только вверх, с торца спирали.
Вот чтобы прикрыть сверху, я применяю асбестовые полоски (фитили). Ну вот такой я!
Если не прикрывать, то серебро легко плавится.
Конструкция разборная, спираль легко меняется при авариях.
Нельзя в печку кидать NaCl, сразу козанёт.
Микруха даёт смещение, причём неизвестно, насколько эта штука дрейфует. Надо бы абсолютное значение.
Xan>> Делал шахтную печку под тигель диаметром 3 см, разгонял до 1260 градусов.
А.С.> Дело не столько в нихроме, сколько в асбесте... Ну не хочу я с ним возиться, а нихром на воздухе максимум до 800 градусов держится...
Никакого асбеста.
Ну вот есть "тигель номер 2, высокий" - примерно 25 мм диаметром и 30 высотой (объём 10 см3). Под него делается печка.
Нихром диаметром 1.5 мм наматывается на оправку диаметром 30 мм примерно 30 витков. Когда "пружина" ослабнет, её внутренний диаметр должен получиться около 33 мм, а длина 35...40 мм.
Нихром надо окислить, если он свежий: положить "пружину" горизонтально, слегка растянув, подать вольт 12 (и более), нагреть до красна, следя за замыканиями.
Окисляется только нихром второго сорта, в котором добавлено железо (20%), чистый нихром не окисляется и для такой конструкции непригоден.
Ну вот, на картинке печка из половинки кирпича со щелями. Под спиралью надо сделать ямку, чтоб кирпич не нагревался сильно. В неё будет выплёскиваться содержимое тигля при авариях. Ямка заполняется или окисью магния, или просто мелом (который станет негашёной известью).
Между спиралью и кирпичом согнутая зигзагом нихромовая проволока - подставка под тигель.
Спираль на картинке - сгоревшая, нижнего вывода у неё нет. И вообще покривевшая.
Выводы спирали вставляются в зажимы (там канавки пропилены). К этим же зажимам с другой стороны подводится питание. 24 вольта, 24 ампера. Ребра на зажимах - для понта!
Чтоб спираль держалась вертикально, на неё одевается кварцевая трубка (повезло, нашёл). Думаю, можно из керамики сделать коробочку. Или взять керамические палочки (вертикально) и снаружи железку.
Но ни в коем случае не из асбеста или чего нибудь с силикатным клеем - теплостойкости не хватит!
Пространство между спиралью и коробочкой заполняется окисью магния (или мелом). Снаружи ещё одна коробочка, промежуток заполнен той же окисью.
Итого, излучение улетает только вверх, с торца спирали.
Вот чтобы прикрыть сверху, я применяю асбестовые полоски (фитили). Ну вот такой я!
Если не прикрывать, то серебро легко плавится.
Конструкция разборная, спираль легко меняется при авариях.
Нельзя в печку кидать NaCl, сразу козанёт.
Прикреплённые файлы:


А.С.> Правда, я хотел уговорить Пиромана сделать код под сенсор (плата, что на снимке, его рук дело) и без изображения - это, в общем, легко обходится предстартовой настройкой - но он сказал, что это, по его мнению, слишком большой геморрой. А так, опять же, у меня валяются около 25 штук PAN101, которые не дают изображения, и всего около 5 сенсоров, которые дают.
Ну не совсем так
Код работает со всеми сенсорами одинаково - берет смещение. Хоть с PAN хоть с ADSN
только сейчас удобнее на пробных экземплярах работать с датчиком дающим каринку. (приятнее видеть что происходит)
Т.к. много еще неясностей.
1. линза от сидирома не дает точного фокуса.
2. угол зрения у датчика и так не большой, а при граничных углах появляются блики.
3. Пок" не будет статистики, удобнее перед запуском датчик направить по картинке, чем по алгоритму. Сейчас на столе на солнце не спервого раза попадаешь
to Xan:
не дрейфует эта микруха. точность 1 градус/разряд.
Ну не совсем так
Код работает со всеми сенсорами одинаково - берет смещение. Хоть с PAN хоть с ADSN
только сейчас удобнее на пробных экземплярах работать с датчиком дающим каринку. (приятнее видеть что происходит)
Т.к. много еще неясностей.
1. линза от сидирома не дает точного фокуса.
2. угол зрения у датчика и так не большой, а при граничных углах появляются блики.
3. Пок" не будет статистики, удобнее перед запуском датчик направить по картинке, чем по алгоритму. Сейчас на столе на солнце не спервого раза попадаешь
to Xan:
не дрейфует эта микруха. точность 1 градус/разряд.
Piroman> не дрейфует эта микруха. точность 1 градус/разряд.
Я имел в виду, что если делать много мелких движений, чтоб пройденный путь получился значительно больше размеров сенсора, а потом вернуться в прежнее положение, то получатся ли координаты те же самые?
Ну и, ИМХО, проще сделать аналоговый сенсор из трёх или четырёх датчиков, по крайнер мере дискретность при этом может быть любая, а не 7 щелчков.
Я имел в виду, что если делать много мелких движений, чтоб пройденный путь получился значительно больше размеров сенсора, а потом вернуться в прежнее положение, то получатся ли координаты те же самые?
Ну и, ИМХО, проще сделать аналоговый сенсор из трёх или четырёх датчиков, по крайнер мере дискретность при этом может быть любая, а не 7 щелчков.
Мышка хороша, чтоб скорость вращения определять, а не угол.
Piroman>> не дрейфует эта микруха. точность 1 градус/разряд.
Xan> Я имел в виду, что если делать много мелких движений, чтоб пройденный путь получился значительно больше размеров сенсора, а потом вернуться в прежнее положение, то получатся ли координаты те же самые?
Х его З. Мы исходим из того, что, во время активного участка, а, скорее всего, до самого апогея, Солнце остаётся в поле зрения этого датчика, при этом считывается абсолютный угол с дискретностью не хуже 1 градуса.
Xan> Ну и, ИМХО, проще сделать аналоговый сенсор из трёх или четырёх датчиков, по крайнер мере дискретность при этом может быть любая, а не 7 щелчков.
Строго говоря, обрабатывая картинку с датчика самостоятельно, а не полагаясь на его внутренний DSP, можно получить "почти аналоговое" перемещение, т.к. там на пиксель 64 градации серого, и перемещение на 1/16 пикселя легко отслеживается, в случае солнца.
Вообще-то, мышиный сенсор, даже в самом тяжёлом случае, если у него есть только квадратурный выход, намного удобнее любого самопала...
Xan> Я имел в виду, что если делать много мелких движений, чтоб пройденный путь получился значительно больше размеров сенсора, а потом вернуться в прежнее положение, то получатся ли координаты те же самые?
Х его З. Мы исходим из того, что, во время активного участка, а, скорее всего, до самого апогея, Солнце остаётся в поле зрения этого датчика, при этом считывается абсолютный угол с дискретностью не хуже 1 градуса.
Xan> Ну и, ИМХО, проще сделать аналоговый сенсор из трёх или четырёх датчиков, по крайнер мере дискретность при этом может быть любая, а не 7 щелчков.
Строго говоря, обрабатывая картинку с датчика самостоятельно, а не полагаясь на его внутренний DSP, можно получить "почти аналоговое" перемещение, т.к. там на пиксель 64 градации серого, и перемещение на 1/16 пикселя легко отслеживается, в случае солнца.
Вообще-то, мышиный сенсор, даже в самом тяжёлом случае, если у него есть только квадратурный выход, намного удобнее любого самопала...
Xan> при перегрузке больше 10ж) - в кубике мозги зашкалят.
Че это вдруг ?
Че это вдруг ?
Xan> Мышка хороша, чтоб скорость вращения определять, а не угол.
Это ещё почему?
Мышка, как раз, хороша именно тем, что даёт абсолютные углы, как настоящий механический гироскоп, а не угловые скорости, и поэтому не требует интегрирования.
Смысл девайса на фотографии, что координаты по двум осям даёт мышиный датчик, а по третьей - пьезогироскоп. Правда, для этого требуется, чтобы солнце было низко над горизонтом, не выше 8 градусов. Если больше - надо в конструкцию вводить призму и в математику - пересчёт координат.
Если гироскопов будет три, то, действительно, два из них можно корректировать по солнечному датчику. Но, вообще-то, применительно к N-Prize, речь шла о том, что вначале полёт происходит по гироскопам, а затем ракета ориентируется продольной осью на Солнце, закручивается вокруг этой оси, после чего запускается двигатель последней ступени, не имеющей СУ и УВТ. При этом ошибка, достижимая параллельным включением 4-х ENC-03 на каждую ось, составляет где-то плюс-минус 10 км по высоте перигея. При времени работы первых двух ступеней около 3 минут.
Это ещё почему?
Мышка, как раз, хороша именно тем, что даёт абсолютные углы, как настоящий механический гироскоп, а не угловые скорости, и поэтому не требует интегрирования.
Смысл девайса на фотографии, что координаты по двум осям даёт мышиный датчик, а по третьей - пьезогироскоп. Правда, для этого требуется, чтобы солнце было низко над горизонтом, не выше 8 градусов. Если больше - надо в конструкцию вводить призму и в математику - пересчёт координат.
Если гироскопов будет три, то, действительно, два из них можно корректировать по солнечному датчику. Но, вообще-то, применительно к N-Prize, речь шла о том, что вначале полёт происходит по гироскопам, а затем ракета ориентируется продольной осью на Солнце, закручивается вокруг этой оси, после чего запускается двигатель последней ступени, не имеющей СУ и УВТ. При этом ошибка, достижимая параллельным включением 4-х ENC-03 на каждую ось, составляет где-то плюс-минус 10 км по высоте перигея. При времени работы первых двух ступеней около 3 минут.
Piroman>> не дрейфует эта микруха. точность 1 градус/разряд.
Xan> Я имел в виду, что если делать много мелких движений, чтоб пройденный путь получился значительно больше размеров сенсора, а потом вернуться в прежнее положение, то получатся ли координаты те же самые?
Xan> Ну и, ИМХО, проще сделать аналоговый сенсор из трёх или четырёх датчиков, по крайнер мере дискретность при этом может быть любая, а не 7 щелчков.
Не надо пока аналоговых сенсоров.
в опытах на столе дергание туда-сюда 10 раз не приводило к дрейфу "0".
Что значит 7 щелчков ?
матрица дешевых датчиков 18 пикселей.
Xan> Я имел в виду, что если делать много мелких движений, чтоб пройденный путь получился значительно больше размеров сенсора, а потом вернуться в прежнее положение, то получатся ли координаты те же самые?
Xan> Ну и, ИМХО, проще сделать аналоговый сенсор из трёх или четырёх датчиков, по крайнер мере дискретность при этом может быть любая, а не 7 щелчков.
Не надо пока аналоговых сенсоров.
в опытах на столе дергание туда-сюда 10 раз не приводило к дрейфу "0".
Что значит 7 щелчков ?
матрица дешевых датчиков 18 пикселей.
Xan>> Я имел в виду, что если делать много мелких движений, чтоб пройденный путь получился значительно больше размеров сенсора, а потом вернуться в прежнее положение, то получатся ли координаты те же самые?
А.С.> Х его З. Мы исходим из того, что, во время активного участка, а, скорее всего, до самого апогея, Солнце остаётся в поле зрения этого датчика, при этом считывается абсолютный угол с дискретностью не хуже 1 градуса.
А так же при наличии управления полетом удержать солнце в поле зрения датчика вполне реально.
А.С.> Х его З. Мы исходим из того, что, во время активного участка, а, скорее всего, до самого апогея, Солнце остаётся в поле зрения этого датчика, при этом считывается абсолютный угол с дискретностью не хуже 1 градуса.
А так же при наличии управления полетом удержать солнце в поле зрения датчика вполне реально.
Piroman> Что значит 7 щелчков ?
Piroman> матрица дешевых датчиков 18 пикселей.
В описании читал, что перемещение по длине всей матрицы даёт или 16, или 32 шага (два режима). То есть, весь диапазон всего ±7 шагов (или ±15).
Значит или надо очень точно удерживать датчик, чтоб солнце не уплыло за пределы, или один шаг будет давать точность ±лапоть.
Это я про микрухи, где нельзя получить изображение.
Xan>> Ну и, ИМХО, проще сделать аналоговый сенсор из трёх или четырёх датчиков, по крайнер мере дискретность при этом может быть любая, а не 7 щелчков.
Piroman> Не надо пока аналоговых сенсоров.
Ну, тут уже речь про вкусы!
Я возился с сенсорами, которые легко давали точность 0.1%, я в них верю!!!
А.С.> Строго говоря, обрабатывая картинку с датчика самостоятельно, а не полагаясь на его внутренний DSP, можно получить "почти аналоговое" перемещение, т.к. там на пиксель 64 градации серого, и перемещение на 1/16 пикселя легко отслеживается, в случае солнца.
Угу.
Не нравится мне только медленный интерфейс (у той, на которую даташит есть) и необходимость процессору много думать.
А.С.> Вообще-то, мышиный сенсор, даже в самом тяжёлом случае, если у него есть только квадратурный выход, намного удобнее любого самопала...
На мой взгляд, самоделка лучше (см. Картинку). Если только квадратурный.
Xan>> при перегрузке больше 10ж) - в кубике мозги зашкалят.
termostat> Че это вдруг ?
В даташите написано "до 10 ж". В кубике кроме датчиков ещё и мозги. Мозги занимаются компенсацией всякого - то есть, обрабатывают числа с датчиков. Если датчик ускорения (АЦП) перегрузился, то арифметика получится кривая, а результат (по компенсируемым датчикам) неправильный.
Когда-то, ещё до x-prize и n-prize меня посетила мысль, что при нынешней электронике можно сделать очень маленькую ракету.
Прикидочная симуляция дала стартовый вес меньше 10 кг.
Это ж можно на новый год под шумок с балкона спутник запустить!!!
Piroman> матрица дешевых датчиков 18 пикселей.
В описании читал, что перемещение по длине всей матрицы даёт или 16, или 32 шага (два режима). То есть, весь диапазон всего ±7 шагов (или ±15).
Значит или надо очень точно удерживать датчик, чтоб солнце не уплыло за пределы, или один шаг будет давать точность ±лапоть.
Это я про микрухи, где нельзя получить изображение.
Xan>> Ну и, ИМХО, проще сделать аналоговый сенсор из трёх или четырёх датчиков, по крайнер мере дискретность при этом может быть любая, а не 7 щелчков.
Piroman> Не надо пока аналоговых сенсоров.
Ну, тут уже речь про вкусы!
Я возился с сенсорами, которые легко давали точность 0.1%, я в них верю!!!
А.С.> Строго говоря, обрабатывая картинку с датчика самостоятельно, а не полагаясь на его внутренний DSP, можно получить "почти аналоговое" перемещение, т.к. там на пиксель 64 градации серого, и перемещение на 1/16 пикселя легко отслеживается, в случае солнца.
Угу.
Не нравится мне только медленный интерфейс (у той, на которую даташит есть) и необходимость процессору много думать.
А.С.> Вообще-то, мышиный сенсор, даже в самом тяжёлом случае, если у него есть только квадратурный выход, намного удобнее любого самопала...
На мой взгляд, самоделка лучше (см. Картинку). Если только квадратурный.
Xan>> при перегрузке больше 10ж) - в кубике мозги зашкалят.
termostat> Че это вдруг ?
В даташите написано "до 10 ж". В кубике кроме датчиков ещё и мозги. Мозги занимаются компенсацией всякого - то есть, обрабатывают числа с датчиков. Если датчик ускорения (АЦП) перегрузился, то арифметика получится кривая, а результат (по компенсируемым датчикам) неправильный.
Когда-то, ещё до x-prize и n-prize меня посетила мысль, что при нынешней электронике можно сделать очень маленькую ракету.
Прикидочная симуляция дала стартовый вес меньше 10 кг.
Это ж можно на новый год под шумок с балкона спутник запустить!!!
Прикреплённые файлы:
В кубике именно на этот случай есть дополнительный аналоговый вход. На который можно повесить что угодно .
.
Copyright © Balancer 1997..2022
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
