-
![[image]](http://forums.airbase.ru/cache/sites/w/w/www.gwiz-partners.com/assets/images/128x128-crop/remove_before.jpg)
Стабилизация Активная - часть II
Теги:
 PopovIgor
PopovIgor

Ckona>> Имело место сильное возмущение.
Ckona> Наиболее вероятной причиной вращения ракеты принимается излом - поворот второй ступени относительно первой за счет упругой деформации несущей шайбы из стеклотекстолита.
Эх, Алексей, а ведь мы с Gematogen и пытались донести это соображение, да, видно, 22.10 на солнце были пятна")
"Чем больше угол, масса, тем больше М изг. и разворот.
задача в общем виде. Дано: М, Fт, Х, время t действия силы Fт.
Определить: М изг. макс. и угол разворота за время t."
На ровном месте. Ни к чему, не правда ли?
И еще, скажи, пожалуйста, почему в расчете ЦД не учитывается выступающая часть справа от бустеров?
Ckona> Наиболее вероятной причиной вращения ракеты принимается излом - поворот второй ступени относительно первой за счет упругой деформации несущей шайбы из стеклотекстолита.
Эх, Алексей, а ведь мы с Gematogen и пытались донести это соображение, да, видно, 22.10 на солнце были пятна
"Чем больше угол, масса, тем больше М изг. и разворот.
задача в общем виде. Дано: М, Fт, Х, время t действия силы Fт.
Определить: М изг. макс. и угол разворота за время t."
На ровном месте. Ни к чему, не правда ли?
И еще, скажи, пожалуйста, почему в расчете ЦД не учитывается выступающая часть справа от бустеров?


 инфо
инфо инструменты
инструменты
Ckona> ЦМ определен экспериментально.
Можешь вкратце пояснить - как?
Собственно, меня интересует - как ты предотвратил растекание воды при наклоне ракеты?
Можешь вкратце пояснить - как?
Собственно, меня интересует - как ты предотвратил растекание воды при наклоне ракеты?


 Ckona
Ckona

PopovIgor> почему в расчете ЦД не учитывается выступающая часть справа от бустеров?
Аэродинамическая тень
Аэродинамическая тень


PopovIgor> "Чем больше угол, масса, тем больше М изг. и разворот.
PopovIgor> задача в общем виде. Дано: М, Fт, Х, время t действия силы Fт.
PopovIgor> Определить: М изг. макс. и угол разворота за время t."
Это же пустые слова, не наполненные никакой конкретикой.
Без примеров расчета, без методик измерения параметров... Абы вякнуть.
PopovIgor> задача в общем виде. Дано: М, Fт, Х, время t действия силы Fт.
PopovIgor> Определить: М изг. макс. и угол разворота за время t."
Это же пустые слова, не наполненные никакой конкретикой.
Без примеров расчета, без методик измерения параметров... Абы вякнуть.
Gematogen> Собственно, меня интересует - как ты предотвратил растекание воды при наклоне ракеты?
Вес воды в пеногенераторе и в следующем отсеке известен, равно как и ее положение (внизу). Поэтому я заменил воду железяками в центрах масс каждого "объема" воды - по нужной оси, разумеется.
Вес воды в пеногенераторе и в следующем отсеке известен, равно как и ее положение (внизу). Поэтому я заменил воду железяками в центрах масс каждого "объема" воды - по нужной оси, разумеется.
Ckona> Горизонтальное положение "на столе" освобождает сквозной канал. Невесомость в "полете" делает неопределенной положение воды в каждой из секций. Небольшое подтормаживание исключает пребывание воды в зоне "выходных" отверстий.
Ckona> ФФук ! - и все...
Кстати, тягу после разделения видно на замедленной съемке - с небольшими вкраплениями воды.
Ckona> Но как только скорость падения "включила" аэродинамику - вода все расставила: хвостом вниз.
Со второй ступенью все более-менее ясно.
По поводу связки.
Мне кажется, что изначально присутствовал излом. На съемке его не видно, так как он направлен в сторону от оператора (туда и наклонилась ракета).
Полностью заправленная ракета с одной стороны имеет максимальный момент инерции, а с другой - низкий ЦТ с минимальным вкладом второй ступени.
По мере расходования воды первой ступени происходят два процесса - уменьшается (причем значительно) момент инерции связки и ЦТ отдаляется от сопла увеличивая плечо отклонения ЦТ от вектора тяги. Поэтому увеличивается как поворачивающий момент, так и склонность ракеты к повороту.
А если учесть то, что перегрузка растет (в связи с потерей массы), то и угол излома должен увеличиваться. А это еще больше отклоняет ЦТ от оси вектора тяги.
В результате наиболее заметные изменения происходят в конце тяги первой ступени, хотя факторы их вызывающие, действовали с момента старта.
Ckona> ФФук ! - и все...
Кстати, тягу после разделения видно на замедленной съемке - с небольшими вкраплениями воды.
Ckona> Но как только скорость падения "включила" аэродинамику - вода все расставила: хвостом вниз.
Со второй ступенью все более-менее ясно.
По поводу связки.
Мне кажется, что изначально присутствовал излом. На съемке его не видно, так как он направлен в сторону от оператора (туда и наклонилась ракета).
Полностью заправленная ракета с одной стороны имеет максимальный момент инерции, а с другой - низкий ЦТ с минимальным вкладом второй ступени.
По мере расходования воды первой ступени происходят два процесса - уменьшается (причем значительно) момент инерции связки и ЦТ отдаляется от сопла увеличивая плечо отклонения ЦТ от вектора тяги. Поэтому увеличивается как поворачивающий момент, так и склонность ракеты к повороту.
А если учесть то, что перегрузка растет (в связи с потерей массы), то и угол излома должен увеличиваться. А это еще больше отклоняет ЦТ от оси вектора тяги.
В результате наиболее заметные изменения происходят в конце тяги первой ступени, хотя факторы их вызывающие, действовали с момента старта.
Gematogen> В результате наиболее заметные изменения происходят в конце тяги первой ступени, хотя факторы их вызывающие, действовали с момента старта.
Вот разгадать бы эти факторы... Из пяти запусков - один такой оказался.
Проще всего считать, что я в спешке (действительно была спешка) не докрутил один из упоров.
В любом случае - нет худа без добра !
Постепенно проясняются меры по увеличению жесткости, а проведенные измерения уже дают сравнительные цифры: втрое уменьшить прогиб при горизонтальном вывешивании.
Вот разгадать бы эти факторы... Из пяти запусков - один такой оказался.
Проще всего считать, что я в спешке (действительно была спешка) не докрутил один из упоров.
В любом случае - нет худа без добра !
Постепенно проясняются меры по увеличению жесткости, а проведенные измерения уже дают сравнительные цифры: втрое уменьшить прогиб при горизонтальном вывешивании.
Ckona> Вот разгадать бы эти факторы... Из пяти запусков - один такой оказался.
Дык основное - изначальный излом.
Ckona> Проще всего считать, что я в спешке (действительно была спешка) не докрутил один из упоров.
Например из-за недокрученного упора. Или докрученного, но на другую высоту. Зависимость отклонения от угла излома - нелинейная. При росте ула отклонение быстро прогрессирует.
Ckona> В любом случае - нет худа без добра !
Ckona> Постепенно проясняются меры по увеличению жесткости, а проведенные измерения уже дают сравнительные цифры: втрое уменьшить прогиб при горизонтальном вывешивании.
Мне кажется, что (учитывая удачные запуски) для этой связки нужно просто отработать методику контроля соосности ступеней. Например, снимая ракету в снаряженном состоянии с разных углов имея на фоне ровный вертикальный предмет.
Или хотя бы отвесом.
Дык основное - изначальный излом.
Ckona> Проще всего считать, что я в спешке (действительно была спешка) не докрутил один из упоров.
Например из-за недокрученного упора. Или докрученного, но на другую высоту. Зависимость отклонения от угла излома - нелинейная. При росте ула отклонение быстро прогрессирует.
Ckona> В любом случае - нет худа без добра !
Ckona> Постепенно проясняются меры по увеличению жесткости, а проведенные измерения уже дают сравнительные цифры: втрое уменьшить прогиб при горизонтальном вывешивании.
Мне кажется, что (учитывая удачные запуски) для этой связки нужно просто отработать методику контроля соосности ступеней. Например, снимая ракету в снаряженном состоянии с разных углов имея на фоне ровный вертикальный предмет.
Или хотя бы отвесом.

Ckona> Небольшой запас устойчивости (от 0,6 до 0,8 калибра второй ступени) обеспечивал стабильный полет связки в запусках 1,2,3,5. Ветер не мог быть источником сильного возмущения в запуске 4.
Итого всего 2%. Интересно, сколько составляет запас аэродинамической устойчивости в момент старта всей ракеты?
Итого всего 2%. Интересно, сколько составляет запас аэродинамической устойчивости в момент старта всей ракеты?

Ckona>> Небольшой запас устойчивости (от 0,6 до 0,8 калибра второй ступени) обеспечивал стабильный полет связки в запусках 1,2,3,5. Ветер не мог быть источником сильного возмущения в запуске 4.
SashaPro> Итого всего 2%.
К чему относится 2% - ? никак не соображу (то ли устойчивость,то ли процент недозапусков, то ли процент от длины ракеты... все не соответствует), хорошо бы пояснение.
Может быть, 20 процентов неудач ?
На самом деле хуже, каждый раз имеются замечания.
SashaPro> Итого всего 2%.
К чему относится 2% - ? никак не соображу (то ли устойчивость,то ли процент недозапусков, то ли процент от длины ракеты... все не соответствует), хорошо бы пояснение.
Может быть, 20 процентов неудач ?
На самом деле хуже, каждый раз имеются замечания.
Ckona> К чему относится 2% - ? никак не соображу (то ли устойчивость,то ли процент недозапусков, то ли процент от длины ракеты... все не соответствует), хорошо бы пояснение.
Это из размеров взятых с картинки, что ты прикрепил к сообщению.
Запас аэродинамической устойчивости равен: 100% * (1150мм - 1090мм) / 2050мм = 2,9268%
Где-то десятки потерял, толи в калькулятор недосмотрел, толи цифру не ту вбил...
Но этот запас соответствует твоей ракете с уже выброшенной водой. Как ты сам утверждал, то нужно чтобы был достаточный запас аэродинамической устойчивости ракеты на старте. У моих ракет с пустым отсеком БРЭО он составляет 3,5%-4,5%. С БРЭО уже 6%-8%. После отработки двигателя повышается до 15-25%.
Это из размеров взятых с картинки, что ты прикрепил к сообщению.
Запас аэродинамической устойчивости равен: 100% * (1150мм - 1090мм) / 2050мм = 2,9268%
Где-то десятки потерял, толи в калькулятор недосмотрел, толи цифру не ту вбил...
Но этот запас соответствует твоей ракете с уже выброшенной водой. Как ты сам утверждал, то нужно чтобы был достаточный запас аэродинамической устойчивости ракеты на старте. У моих ракет с пустым отсеком БРЭО он составляет 3,5%-4,5%. С БРЭО уже 6%-8%. После отработки двигателя повышается до 15-25%.
SashaPro> Запас аэродинамической устойчивости равен: 100% * (1150мм - 1090мм) / 2050мм = 2,9268%
Нижняя бутылка почему-то неучитывается?
Нижняя бутылка почему-то неучитывается?
SashaPro> 2,9268%
Во! Теперь сошлось. На "моем языке" - 3% от длины ракеты.
SashaPro> Нижняя бутылка почему-то не учитывается?
Ее некорректно учитывать - при малых углах атаки она в аэродинамической тени.
Гораздо бОльшее влияние (в сторону повышения стабильности) может оказать разрежение под периферийными бутылками ускорителя. Увы, я такие расчеты не освоил.
Собственно, цель была: определить плечо аэродинамич.неустойчивости, а оказалось - устойчива. Можно было и так догадаться по предыдущим запускам, но тут удлиненный топливный бак.
Доберусь до "МИКа" - заполню водой и померяю стартовый ЦТ.
Во! Теперь сошлось. На "моем языке" - 3% от длины ракеты.
SashaPro> Нижняя бутылка почему-то не учитывается?
Ее некорректно учитывать - при малых углах атаки она в аэродинамической тени.
Гораздо бОльшее влияние (в сторону повышения стабильности) может оказать разрежение под периферийными бутылками ускорителя. Увы, я такие расчеты не освоил.
Собственно, цель была: определить плечо аэродинамич.неустойчивости, а оказалось - устойчива. Можно было и так догадаться по предыдущим запускам, но тут удлиненный топливный бак.
Доберусь до "МИКа" - заполню водой и померяю стартовый ЦТ.
SashaPro> Но этот запас соответствует твоей ракете с уже выброшенной водой. Как ты сам утверждал, то нужно чтобы был достаточный запас аэродинамической устойчивости ракеты на старте.
У водяных ракет на старте всегда устойчивое состояние неустойчивости.
А пустая первая ступень сразу отделяется.
У водяных ракет на старте всегда устойчивое состояние неустойчивости.
А пустая первая ступень сразу отделяется.
Ардоскоп обзавелся потомством.
Как это часто бывает, сынки много отсасывают...
Как это часто бывает, сынки много отсасывают...
Прикреплённые файлы:



Ckona> Ардоскоп обзавелся потомством.
а что это за девайс такой?
а что это за девайс такой?

А.С.> а что это за девайс такой?
Заводской макет "умного ящика", в составе "полный фарш".
Ну, почти - два датчика все-таки навесные.
Теперь этого младенца надо будет учить уму-разуму.
А когда он "вырастет большой", то будет совсем маленьким.
Прошу понять правильно ... (молчуны живут дольше болтливых).
Но папаша, бесспорно - Ардоскоп.
Заводской макет "умного ящика", в составе "полный фарш".
Ну, почти - два датчика все-таки навесные.
Теперь этого младенца надо будет учить уму-разуму.
А когда он "вырастет большой", то будет совсем маленьким.
Прошу понять правильно ... (молчуны живут дольше болтливых).
Но папаша, бесспорно - Ардоскоп.

shadowjack
втянувшийся
Ckona> Прошу понять правильно ... (молчуны живут дольше болтливых).
Выглядит добротно - настоящая "взрослая" бортовая аппаратура.
Какой процессор, какой набор датчиков?
Выглядит добротно - настоящая "взрослая" бортовая аппаратура.
Какой процессор, какой набор датчиков?


Нужна помощь ") Pinko просил помочь с расчетами. Привожу выдержку из сообщения:
Pinko просил помочь с расчетами. Привожу выдержку из сообщения:
"Шпиндель элеронов будут непосредственно связаны с валами из четырех небольших шаговых двигатели. Так мне было интересно какая будет сила крутящий момент, действующий на шпинделе, если элероны с поверхности "S" находятся под заданным углом "а" к воздушному потоку и ракета движется со скоростью "V". Это, чтобы увидеть если шаговые двигатели смогут двигать и держать элероны без редукторов."
Pinko просил помочь с расчетами. Привожу выдержку из сообщения:"Шпиндель элеронов будут непосредственно связаны с валами из четырех небольших шаговых двигатели. Так мне было интересно какая будет сила крутящий момент, действующий на шпинделе, если элероны с поверхности "S" находятся под заданным углом "а" к воздушному потоку и ракета движется со скоростью "V". Это, чтобы увидеть если шаговые двигатели смогут двигать и держать элероны без редукторов."
Прикреплённые файлы:

 Xan
Xan

Skyangel>
Приблизительно момент считается так:
M = F * x = P * S * x
где S — площадь элеронов, x — расстояние от оси до центра аэродинамического давления, можно брать просто геометрический центр, P — давление:
P = sin(a) * rho * v2 / 2
sin(a) — синус угла отклонение элерона, rho — плотность воздуха (в СИ примерно 1), v2 — квадрат скорости.
ЗЫ
Лучше вместо шаговиков использовать рулевые машинки для авиалюбителей.
Там и управление проще гораздо (железно и программно), и редуктор внутри, и момент приличный, и быстродействие достаточное.
И их огромный выбор всяких.
Приблизительно момент считается так:
M = F * x = P * S * x
где S — площадь элеронов, x — расстояние от оси до центра аэродинамического давления, можно брать просто геометрический центр, P — давление:
P = sin(a) * rho * v2 / 2
sin(a) — синус угла отклонение элерона, rho — плотность воздуха (в СИ примерно 1), v2 — квадрат скорости.
ЗЫ
Лучше вместо шаговиков использовать рулевые машинки для авиалюбителей.
Там и управление проще гораздо (железно и программно), и редуктор внутри, и момент приличный, и быстродействие достаточное.
И их огромный выбор всяких.
Xan> Приблизительно момент считается так:
Большое тебе человеческое спасибо
Большое тебе человеческое спасибо

Skyangel> Нужна помощь Pinko просил помочь с расчетами. Привожу выдержку из сообщения:
Skyangel> какая будет сила крутящий момент, действующий на шпинделе,
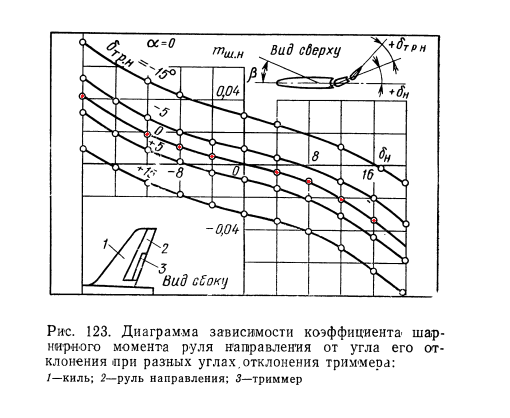
Это называется шарнирный момент Мш, он определяется по формуле
Мш=m*q*S*b
где
m - коэффициент шарнирного момента (экспериментальный)
q - скоростной напор =rho*v*v/2
S - площадь руля
b - средняя аэр. хорда руля по перпендикуляру к оси
Для определения коэффициента m можно воспользоваться типичной зависимостью от угла отклонения см.фото. Красные точки это обычный руль без триммера.
Pinko просил помочь с расчетами. Привожу выдержку из сообщения:Skyangel> какая будет сила крутящий момент, действующий на шпинделе,
Это называется шарнирный момент Мш, он определяется по формуле
Мш=m*q*S*b
где
m - коэффициент шарнирного момента (экспериментальный)
q - скоростной напор =rho*v*v/2
S - площадь руля
b - средняя аэр. хорда руля по перпендикуляру к оси
Для определения коэффициента m можно воспользоваться типичной зависимостью от угла отклонения см.фото. Красные точки это обычный руль без триммера.
Прикреплённые файлы:
Это сообщение редактировалось 01.04.2015 в 11:55
RocKI> Это называется шарнирный момент Мш, он определяется по формуле
Игорь, и тебе Большое человеческое спасибо
Игорь, и тебе Большое человеческое спасибо
Skyangel>
Замечу, что моя формула при маленьких углах даёт в несколько раз большую величину, чем картинка RocKI.
В частности, при 20 градусах в 3.5 раза.
Ну и картинка только для дозвука.
Но если принять во внимание, что зависимость момента от скорости квадратичная, то всё равно надо брать самую предельную скорость, самый предельный угол и считать самый предельный момент.
И на него рассчитывать привод.
Так что тонкости при малых углах и скоростях всё равно не имеют значения.
ЗЫ
Рулевые машинки имеют ещё то преимущество, что при большой нагрузке они отрабатывают команду, упираясь из последних сил. Возможно, застревая, когда сил не хватает, но когда противодействие ослабнет, отработают до конца.
А ШД могут сорваться из синхронности и потерять соответствие между своим поворотом и тем, что "в уме" у контроллера. Причём срыв этот будет на большой угол — на множество шагов.
Замечу, что моя формула при маленьких углах даёт в несколько раз большую величину, чем картинка RocKI.
В частности, при 20 градусах в 3.5 раза.
Ну и картинка только для дозвука.
Но если принять во внимание, что зависимость момента от скорости квадратичная, то всё равно надо брать самую предельную скорость, самый предельный угол и считать самый предельный момент.
И на него рассчитывать привод.
Так что тонкости при малых углах и скоростях всё равно не имеют значения.
ЗЫ
Рулевые машинки имеют ещё то преимущество, что при большой нагрузке они отрабатывают команду, упираясь из последних сил. Возможно, застревая, когда сил не хватает, но когда противодействие ослабнет, отработают до конца.
А ШД могут сорваться из синхронности и потерять соответствие между своим поворотом и тем, что "в уме" у контроллера. Причём срыв этот будет на большой угол — на множество шагов.
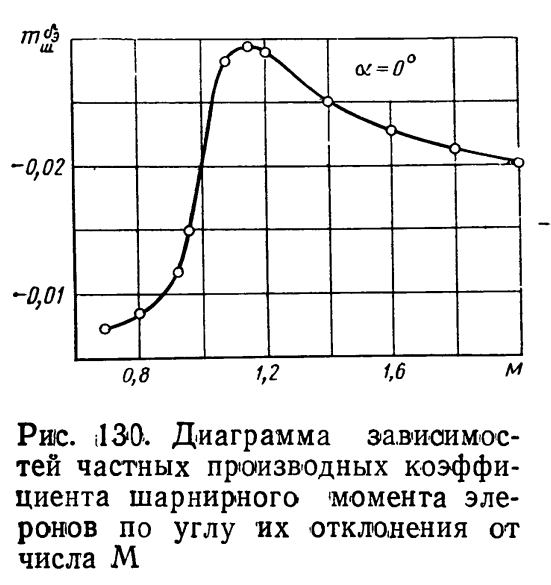
Xan> Ну и картинка только для дозвука.
Вот влияние сверхзвука. Правда, на элерон, но это не принципиально.
Вот влияние сверхзвука. Правда, на элерон, но это не принципиально.
Прикреплённые файлы:
Copyright © Balancer 1997..2020
Создано 09.01.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 09.01.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
