 EG54
EG54

 инфо
инфо инструменты
инструменты SaturnVnew
SaturnVnew
 Xan
Xan

 pinko
pinko

 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/le/lenta/icdn/images/2015/03/16/19/20150316195607852/128x128-crop/original_16016ebbb7145331d02b346734615718.jpg)
Продраться через атмосферу.
Теги:
mihail66> Так мне уже надоело использовать этот "самый простой рабочий вариант для многоступенчатых ракет", включать второй движок сразу после окончания работы первого, или через какую то экспериментально подобранную задержку!
mihail66> Потому что хочется и нужно именно так:
Xan>>>> Когда ускорение вдоль оси от сопротивления воздуха упадёт до маленькой доли g, тогда и включать!!!
Логика решения непонятна. Зачем переразгонять ракету, а потом ждать падения скорости до экономно-выгодной для полета в атмосфере? Может проще рассчитать правильно ракету, в частности необходимое количество топлива первой ступени, чтобы первая смогла разогнать вторую именно до нужной, выгодной скорости полета в атмосфере. И тогда отпадет необходимость в разных не нужных прибамбасах, имеющих массу и естественно снижающих общую высоту, снижающих надежность срабатывания и добавляющих головную боль. Первая ступень в этом случае будет просто двигателем, более легким( и дающем большую высоту). Любой инерционный грузик, в том числе и ртутный всего лишь отмечает окончание тяги первой ступени. И этот момент не совпадает автоматом с моментом разделения. И зачем в этом случае ловить журавля в небе?
mihail66> Потому что хочется и нужно именно так:
Xan>>>> Когда ускорение вдоль оси от сопротивления воздуха упадёт до маленькой доли g, тогда и включать!!!
Логика решения непонятна. Зачем переразгонять ракету, а потом ждать падения скорости до экономно-выгодной для полета в атмосфере? Может проще рассчитать правильно ракету, в частности необходимое количество топлива первой ступени, чтобы первая смогла разогнать вторую именно до нужной, выгодной скорости полета в атмосфере. И тогда отпадет необходимость в разных не нужных прибамбасах, имеющих массу и естественно снижающих общую высоту, снижающих надежность срабатывания и добавляющих головную боль. Первая ступень в этом случае будет просто двигателем, более легким( и дающем большую высоту). Любой инерционный грузик, в том числе и ртутный всего лишь отмечает окончание тяги первой ступени. И этот момент не совпадает автоматом с моментом разделения. И зачем в этом случае ловить журавля в небе?



Потому что у него двигатель короткоиграющий как у всех нас и он не имеет въйбора т.е. будет переразгонять:) Ждать больше чтоб какая то скорост упадет до какая то частичка g тоже не советую, велика опасност ракета завалится и тогда становится очень плохо- ракета улетает проч ну скажем под углом и уйдет очень далеко. Без gps возможно и не найти.Да и въйсота будет невелика.

EG54> ...Зачем переразгонять ракету, а потом ждать падения скорости до экономно-выгодной для полета в атмосфере? Может проще рассчитать правильно ракету, в частности необходимое количество топлива первой ступени, чтобы первая смогла разогнать вторую именно до нужной, выгодной скорости полета в атмосфере.
Да как бы всё правильно и рассчитать то можно. Но не научились мы пока делать долгоиграющие двигатели с малой тягой и необходимым количеством топлива. И получается, что долгоиграющий двигатель это мнОООгоступенчатый двигатель.
EG54>...И тогда отпадет необходимость в разных не нужных прибамбасах, имеющих массу и естественно снижающих общую высоту, снижающих надежность срабатывания и добавляющих головную боль.
И когда этот двигатель - многоступенчатый, то все эти "не нужные прибамбасы" становятся нужными, но их становится много.
Поэтому уменьшаем эту мнОООгоступенчатость до двух-трех и скачем как кенгуру.
EG54>...Любой инерционный грузик, в том числе и ртутный всего лишь отмечает окончание тяги первой ступени. И этот момент не совпадает автоматом с моментом разделения.
Конечно не совпадает, ведь требуется еще время на разделение. А вот тут как раз переразгон ракеты нам в помощь.
Такая вот логика решения!
Да как бы всё правильно и рассчитать то можно. Но не научились мы пока делать долгоиграющие двигатели с малой тягой и необходимым количеством топлива. И получается, что долгоиграющий двигатель это мнОООгоступенчатый двигатель.
EG54>...И тогда отпадет необходимость в разных не нужных прибамбасах, имеющих массу и естественно снижающих общую высоту, снижающих надежность срабатывания и добавляющих головную боль.
И когда этот двигатель - многоступенчатый, то все эти "не нужные прибамбасы" становятся нужными, но их становится много.
Поэтому уменьшаем эту мнОООгоступенчатость до двух-трех и скачем как кенгуру.
EG54>...Любой инерционный грузик, в том числе и ртутный всего лишь отмечает окончание тяги первой ступени. И этот момент не совпадает автоматом с моментом разделения.
Конечно не совпадает, ведь требуется еще время на разделение. А вот тут как раз переразгон ракеты нам в помощь.
Такая вот логика решения!


Xan> Но да, критерием может быть именно падение отрицательного ускорения до определённой величины.
Xan> Конечно при условии, что ракета летит вертикально.")
Xan> Если по параболе, то отрицательное ускорение достигнет некоторого минимума и снова начнёт расти.
А если взять сумму g в трех осях???
Уважаемый Xan, растолкуй!
Xan> Конечно при условии, что ракета летит вертикально.
Xan> Если по параболе, то отрицательное ускорение достигнет некоторого минимума и снова начнёт расти.
А если взять сумму g в трех осях???
Уважаемый Xan, растолкуй!

Если вторая ступень непрочно связана с первой, а так и бывает у любителей. Соединение просто малый цилиндр в больший цилиндр с небольшим трением. То выжидать оптимальное время после окончания тяги не получится, на достаточной скорости воздух сам оделит вторую ступень. По крайне мере у нас так было, когда первая ступень была по размерам (и стабилизаторам) больше чем вторая.


mihail66> А если взять сумму g в трех осях???
Не понял.
Боковые ускорения могут возникать от попадания в слои воздуха, движущиеся в разных (горизонтальных) направлениях.
И от отклонения движения ракеты точно вдоль своей оси.
Если смотреть не только на ускорение вдоль оси, но и на боковые, этой информации всё равно не хватит для определения ориентации ракеты и принятие какого-либо решения.
Чтоб иметь полную информацию, надо использовать гироскопы.
Ну и микроконтроллерные "мозги".
Промежуточные решения — без микроконтроллера — они раньше (в первых "взрослых" ракетах) применялись, но они гораздо дороже и тяжелее.
Сейчас, в связи с появление маленьких и дешёвых микроконтроллеров, гораздо проще и дешевле всё делать в цифре.
Лучше сразу прыгнуть от "грузика на пружинке" к полной системе.
Может быть можно приспособить мозги из квадрокоптера.
Что-то мне кажется, что подведя в правильном порядке управляющие сигналы к рулевым машинкам (которые крутят аэродинамические рули), можно получить сразу летящую строго вертикально ракету.
Не понял.
Боковые ускорения могут возникать от попадания в слои воздуха, движущиеся в разных (горизонтальных) направлениях.
И от отклонения движения ракеты точно вдоль своей оси.
Если смотреть не только на ускорение вдоль оси, но и на боковые, этой информации всё равно не хватит для определения ориентации ракеты и принятие какого-либо решения.
Чтоб иметь полную информацию, надо использовать гироскопы.
Ну и микроконтроллерные "мозги".
Промежуточные решения — без микроконтроллера — они раньше (в первых "взрослых" ракетах) применялись, но они гораздо дороже и тяжелее.
Сейчас, в связи с появление маленьких и дешёвых микроконтроллеров, гораздо проще и дешевле всё делать в цифре.
Лучше сразу прыгнуть от "грузика на пружинке" к полной системе.
Может быть можно приспособить мозги из квадрокоптера.
Что-то мне кажется, что подведя в правильном порядке управляющие сигналы к рулевым машинкам (которые крутят аэродинамические рули), можно получить сразу летящую строго вертикально ракету.
N.a.> на достаточной скорости воздух сам оделит вторую ступень.
Трубка Пито, которая надувает презерватив в переходном отсеке, который расталкивает ступени.
Давление будет гарантировано больше силы аэродинамического сопротивления, потому что Cx ракеты меньше единицы.
Ну и можно получить задержку, подбирая диаметр трубки.
Трубка Пито, которая надувает презерватив в переходном отсеке, который расталкивает ступени.
Давление будет гарантировано больше силы аэродинамического сопротивления, потому что Cx ракеты меньше единицы.
Ну и можно получить задержку, подбирая диаметр трубки.
mihail66>> А если взять сумму g в трех осях???
Xan> Не понял.
Xan> Боковые ускорения могут возникать от попадания в слои воздуха, движущиеся в разных (горизонтальных) направлениях.
Xan> И от отклонения движения ракеты точно вдоль своей оси.
Я думал этим скомпенсировать отклонение гравитационного g от Z-оси акселерометра, если полет будет не вертикальным. Тогда при полете под углом "красная черта" будет наступать в ожидаемый момент относительно опорника на компараторе.
Если я правильно понимаю, то просуммировав три оси, как бы мы этот датчик не крутили не выходе будем иметь постоянную величину. И только при перемещении будем видеть изменения.
Xan> Не понял.
Xan> Боковые ускорения могут возникать от попадания в слои воздуха, движущиеся в разных (горизонтальных) направлениях.
Xan> И от отклонения движения ракеты точно вдоль своей оси.
Я думал этим скомпенсировать отклонение гравитационного g от Z-оси акселерометра, если полет будет не вертикальным. Тогда при полете под углом "красная черта" будет наступать в ожидаемый момент относительно опорника на компараторе.
Если я правильно понимаю, то просуммировав три оси, как бы мы этот датчик не крутили не выходе будем иметь постоянную величину. И только при перемещении будем видеть изменения.
Это сообщение редактировалось 04.10.2016 в 15:53

mihail66> Я думал этим скомпенсировать отклонение гравитационного g от Z-оси акселерометра, если полет будет не вертикальным.
Опять те же грабли! В полёте ракеты акселерометр не чувствует g! Ну, то есть вообще никак. Из показаний акселерометра получить отклонение от вертикали можно, только если объект ПОКОИТСЯ ИЛИ ПЕРЕМЕЩАЕТСЯ РАВНОМЕРНО И ПРЯМОЛИНЕЙНО.
В ракете, которая движется неравномерно, а, часто и непрямолинейно, акселерометр показывает, в основном, равнодействующую тяги мотора и аэродинамических сил. Если мы пускаем ракету с направляющей, наклонённой под 45 к горизонту, то перед запуском ракеты мы имеем проекции на X и Y по 0,707 от "же". В момент запуска двигателя проекция по одной оси уменьшается, по другой - увеличивается. Пока ракета едет по направляющей, величина бокового ускорения до нуля упасть не может, а, как только хвост ракеты сходит с направляющей, ракета начинает участвовать в свободном падении не знаю, как это правильно сформулировать, но суть именно в том, что, когда пропадает реакция опоры, акселерометр теряет направление на центр Земли, и чувствует только негравитационные силы. Кроме тяги двигателя и аэродинамического сопротивления, это могут быть, например, перемещение ЦТ из-за плескания топлива в баках, изгиб планера ракеты и т.д.
Для контроля вертикали в летящей ракете обязательно надо использовать гироскоп.
Опять те же грабли! В полёте ракеты акселерометр не чувствует g! Ну, то есть вообще никак. Из показаний акселерометра получить отклонение от вертикали можно, только если объект ПОКОИТСЯ ИЛИ ПЕРЕМЕЩАЕТСЯ РАВНОМЕРНО И ПРЯМОЛИНЕЙНО.
В ракете, которая движется неравномерно, а, часто и непрямолинейно, акселерометр показывает, в основном, равнодействующую тяги мотора и аэродинамических сил. Если мы пускаем ракету с направляющей, наклонённой под 45 к горизонту, то перед запуском ракеты мы имеем проекции на X и Y по 0,707 от "же". В момент запуска двигателя проекция по одной оси уменьшается, по другой - увеличивается. Пока ракета едет по направляющей, величина бокового ускорения до нуля упасть не может, а, как только хвост ракеты сходит с направляющей, ракета начинает участвовать в свободном падении
не знаю, как это правильно сформулировать, но суть именно в том, что, когда пропадает реакция опоры, акселерометр теряет направление на центр Земли, и чувствует только негравитационные силы. Кроме тяги двигателя и аэродинамического сопротивления, это могут быть, например, перемещение ЦТ из-за плескания топлива в баках, изгиб планера ракеты и т.д.Для контроля вертикали в летящей ракете обязательно надо использовать гироскоп.


mihail66> Я думал этим скомпенсировать отклонение гравитационного g от Z-оси акселерометра, если полет будет не вертикальным.
Было уже обсуждано, смотри здесь еще один способ сказать что Б.г. объяснил.

Было уже обсуждано, смотри здесь еще один способ сказать что Б.г. объяснил.
Использование микроэлектромеханических (MEMS) акселерометров в ракетомоделях [pinko#26.06.15 03:38]
… Эта дискуссия имеет очень практический аспект в считывании и интерпретации данных с МЭМС акселерометры, быть 1D или 3D. Все эти расчеты и теоретические дискуссии имеют реальное применение в любой любительскоe БРЭО, программное обеспечение, моделирование и т.д. т.1 Если мы поместим акселерометр на поверхности, поверхность толкает его вверх и гравитация тянет его вниз - результирующая сила равна нулю. Но MEMS акселерометры имеют эту "проблему", что они не могут чувствовать гравитации . Так…// Ракетомодельный
Б.г.> Опять те же грабли! В полёте ракеты акселерометр не чувствует g!
К одноосевому датчику апогея на акселерометре это не имеет отношения! Т.е. этот факт никак не влияет на его работоспособность. Это я от "тех же граблей" открещиваюсь и открещиваю.
Б.г.> Если мы пускаем ракету с направляющей, наклонённой под 45 к горизонту, то перед запуском ракеты мы имеем проекции на X и Y по 0,707 от "же".
А где мы их имеем? В ракете?
Б.г.> не знаю, как это правильно сформулировать.
Это инерциальная система отсчёта с локальной системой координат. И тут у вас походу ошибка с переходом в уравнениях к ней от общей системы. Причём это 1 из 5 ошибок, которых я насчитал около этой темы здесь и сейчас и которые буду делать сам. Ну т.е. я буду делать правильно, а вы будете думать (выражать своё ИМХО против моих расчётов и практики), что это ошибки.")
К одноосевому датчику апогея на акселерометре это не имеет отношения! Т.е. этот факт никак не влияет на его работоспособность. Это я от "тех же граблей" открещиваюсь и открещиваю.
Б.г.> Если мы пускаем ракету с направляющей, наклонённой под 45 к горизонту, то перед запуском ракеты мы имеем проекции на X и Y по 0,707 от "же".
А где мы их имеем? В ракете?
Б.г.> не знаю, как это правильно сформулировать.
Это инерциальная система отсчёта с локальной системой координат. И тут у вас походу ошибка с переходом в уравнениях к ней от общей системы. Причём это 1 из 5 ошибок, которых я насчитал около этой темы здесь и сейчас и которые буду делать сам. Ну т.е. я буду делать правильно, а вы будете думать (выражать своё ИМХО против моих расчётов и практики), что это ошибки.
mihail66> Я думал этим скомпенсировать отклонение гравитационного g от Z-оси акселерометра, если полет будет не вертикальным.
Если ракета полетит в сторону, то она тоже полетит. И всё выше написанное будет работать и в кривом полёте, причём так же успешно на одноосевом акселерометре, как и при строго вертикальном полёте. Особенно если складывать его показания - это будет работать ещё и дополнительным фильтром от помех в виде вибраций корпуса ракеты, а точности с лихвой хватит на то, чтобы определять скорость полёта и когда чего делать.
Если ракета полетит в сторону, то она тоже полетит. И всё выше написанное будет работать и в кривом полёте, причём так же успешно на одноосевом акселерометре, как и при строго вертикальном полёте. Особенно если складывать его показания - это будет работать ещё и дополнительным фильтром от помех в виде вибраций корпуса ракеты, а точности с лихвой хватит на то, чтобы определять скорость полёта и когда чего делать.
Б.г.> Для контроля вертикали в летящей ракете обязательно надо использовать гироскоп.
Учитывая случайную угловую скорость вращения корпуса ракеты вокруг главной оси и большинство доступных диапазонов измерения у МЕМС-гироскопов, обязательно и использование системы активной стабилизации, чтобы останавливать это вращение, иначе сядут гироскопы.
А проще просто закрутить ракету вначале её полёта.
Учитывая случайную угловую скорость вращения корпуса ракеты вокруг главной оси и большинство доступных диапазонов измерения у МЕМС-гироскопов, обязательно и использование системы активной стабилизации, чтобы останавливать это вращение, иначе сядут гироскопы.
А проще просто закрутить ракету вначале её полёта.

Б.г.>Если мы пускаем ракету с направляющей, наклонённой под 45 к горизонту, то перед запуском ракеты мы имеем проекции на X и Y по 0,707 от "же".
Неверно. Исходя из твоих цифр, получается, что проекция на Z в этом случае будет равна 0.
Правильно будет:
Z -> 0,707...
X -> 0,5
Y -> 0,5
Неверно. Исходя из твоих цифр, получается, что проекция на Z в этом случае будет равна 0.
Правильно будет:
Z -> 0,707...
X -> 0,5
Y -> 0,5
Это сообщение редактировалось 04.10.2016 в 18:22
Massaraksh> Правильно будет:
Massaraksh> Z -> 0,707...
Massaraksh> X -> 0,5
Massaraksh> Y -> 0,5
А как так получилось? Расписать можешь?
Massaraksh> Z -> 0,707...
Massaraksh> X -> 0,5
Massaraksh> Y -> 0,5
А как так получилось? Расписать можешь?
Massaraksh>> Правильно будет:
Massaraksh>> Z -> 0,707...
Massaraksh>> X -> 0,5
Massaraksh>> Y -> 0,5
SashaMaks> А как так получилось? Расписать можешь?
Получается пуск по горизонту. Тут такие пуски делать запрещено!
Massaraksh>> Z -> 0,707...
Massaraksh>> X -> 0,5
Massaraksh>> Y -> 0,5
SashaMaks> А как так получилось? Расписать можешь?
Получается пуск по горизонту. Тут такие пуски делать запрещено!
Прикреплённые файлы:
Massaraksh>> Правильно будет:
Massaraksh>> Z -> 0,707...
Massaraksh>> X -> 0,5
Massaraksh>> Y -> 0,5
SashaMaks> А как так получилось? Расписать можешь?
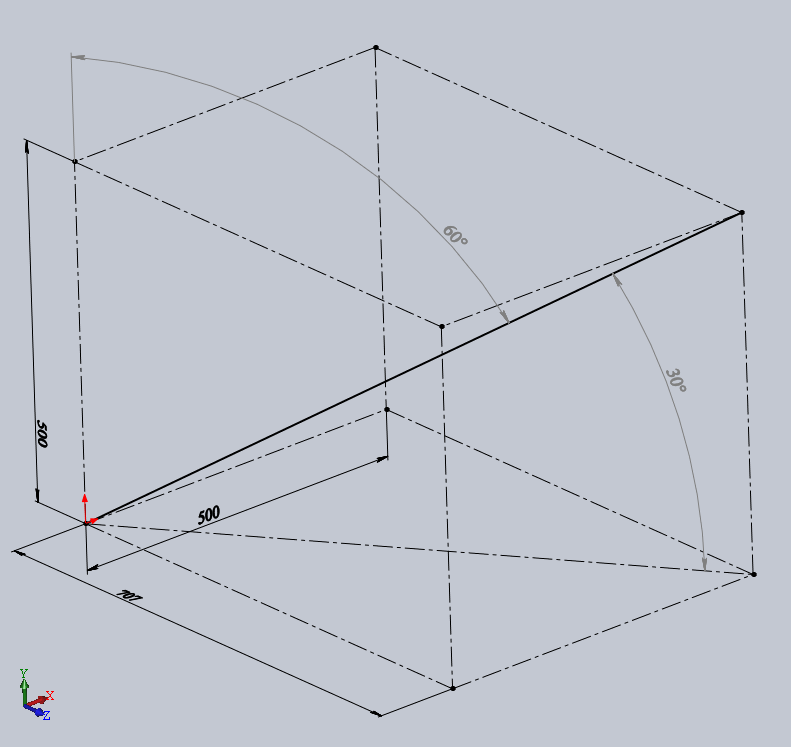
2 исходных условия из текста:
- Пуск под 45 градусов
- Проекции на оси X,Y равны.
Надо бы нарисовать, но я не дома, с планшета. Короче, g=Корень((g*ПроекцияХ)2+(g*ПроекцияY)2+(g*ПроекцияZ)2)
Но, проекция X=проекция Y
Кроме того, проекция на плоскость XY должна быть равна проекции на ось Z (чтобы было 45 град). Отсюда всё находится.
Massaraksh>> Z -> 0,707...
Massaraksh>> X -> 0,5
Massaraksh>> Y -> 0,5
SashaMaks> А как так получилось? Расписать можешь?
2 исходных условия из текста:
- Пуск под 45 градусов
- Проекции на оси X,Y равны.
Надо бы нарисовать, но я не дома, с планшета. Короче, g=Корень((g*ПроекцияХ)2+(g*ПроекцияY)2+(g*ПроекцияZ)2)
Но, проекция X=проекция Y
Кроме того, проекция на плоскость XY должна быть равна проекции на ось Z (чтобы было 45 град). Отсюда всё находится.
SashaMaks> Получается пуск по горизонту. Тут такие пуски делать запрещено!
Z - вертикально.
Z - вертикально.
SashaMaks>> Получается пуск по горизонту. Тут такие пуски делать запрещено!
Massaraksh> Z - вертикально.
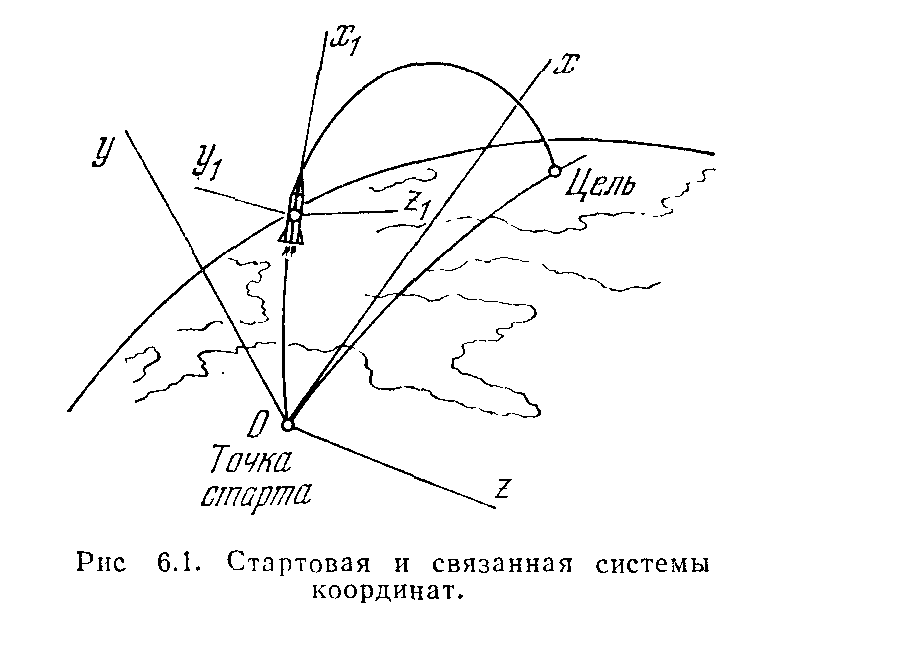
В.И. Феодосьев с тобой не согласен
Massaraksh> Z - вертикально.
В.И. Феодосьев с тобой не согласен
Прикреплённые файлы:
mihail66> Но не научились мы пока делать долгоиграющие двигатели с малой тягой и необходимым количеством топлива.
mihail66> Поэтому и скачем как кенгуру.
Зачем долгоиграющий двигатель, если большая часть полета, это полет по инерции снаряда. Надо правильно разогнать ракету имеющимся двигателем. Сделай колбаску двигателя не 3 см в диаметре, а один и уменьшишь тягу. При сохранении массы двигателя увеличишь время работы, если хочешь добраться до точки апогея на работающем двигателе. Кенгуру по сравнению с правильным разгоном не даст преимущества в высоте при той же массе двигателя и ракеты.
Для сравнения. Водная ракета теряет своё топливо за 0.1 секунду.А у тебя время работы двигателя значительно больше. Ну если только планируешь полет на Марс, то да
mihail66> Поэтому и скачем как кенгуру.
Зачем долгоиграющий двигатель, если большая часть полета, это полет по инерции снаряда. Надо правильно разогнать ракету имеющимся двигателем. Сделай колбаску двигателя не 3 см в диаметре, а один и уменьшишь тягу. При сохранении массы двигателя увеличишь время работы, если хочешь добраться до точки апогея на работающем двигателе. Кенгуру по сравнению с правильным разгоном не даст преимущества в высоте при той же массе двигателя и ракеты.
Для сравнения. Водная ракета теряет своё топливо за 0.1 секунду.А у тебя время работы двигателя значительно больше. Ну если только планируешь полет на Марс, то да
Б.г.> В.И. Феодосьев с тобой не согласен
А. Ну я ж не знаю, как это у вас, профессионалов, принято. Я-то думал, как обычно, X,Y - в плоскости, Z - в высоту. На акселерометрах X,Y,Z нарисованы тоже в соответствии в этой системой?
А. Ну я ж не знаю, как это у вас, профессионалов, принято. Я-то думал, как обычно, X,Y - в плоскости, Z - в высоту. На акселерометрах X,Y,Z нарисованы тоже в соответствии в этой системой?
Б.г.>> В.И. Феодосьев с тобой не согласен
Massaraksh> А. Ну я ж не знаю, как это у вас, профессионалов, принято. Я-то думал, как обычно, X,Y - в плоскости, Z - в высоту. На акселерометрах X,Y,Z нарисованы тоже в соответствии в этой системой?
Z не столько в высоту, сколько перпендикулярно печатной плате Если плата стоит боком, то Z горизонтально. Если плата стоит поперёк ракеты, для этого она должна быть круглой :), то Z вертикально.
Я сейчас мучаю свою прошивку, чтоб можно было переопределение осей делать.
24 возможных положения, причём, знаки меняются, ясен пень. Очень подмывает махнуть рукой, и сделать разложение по осям по факту.
Но у ADIS16445 у разных осей получаются разные диапазоны. Так, акселерометр Z переполняется уже при 5,25 "же" (гарантированный диапазон по всем трём осям - 5 "же"), а у оси Х чётко меряет до 7 без какой-то малости. Цифровой-то диапазон до 8 с лишним (же=4000, а макс -32768/+32767), и, если ускорение сильно зашкаливает, он эти цифры выдаёт, просто у разных каналов при разных ускорениях портится линейность.
А у ADXL312 и ADLX345 диапазон до 12/16 "же", но по оси Z хуже шумы и стабильность.
Massaraksh> А. Ну я ж не знаю, как это у вас, профессионалов, принято. Я-то думал, как обычно, X,Y - в плоскости, Z - в высоту. На акселерометрах X,Y,Z нарисованы тоже в соответствии в этой системой?
Z не столько в высоту, сколько перпендикулярно печатной плате
Если плата стоит боком, то Z горизонтально. Если плата стоит поперёк ракеты, для этого она должна быть круглой :), то Z вертикально.Я сейчас мучаю свою прошивку, чтоб можно было переопределение осей делать.
24 возможных положения, причём, знаки меняются, ясен пень. Очень подмывает махнуть рукой, и сделать разложение по осям по факту.Но у ADIS16445 у разных осей получаются разные диапазоны. Так, акселерометр Z переполняется уже при 5,25 "же" (гарантированный диапазон по всем трём осям - 5 "же"), а у оси Х чётко меряет до 7 без какой-то малости. Цифровой-то диапазон до 8 с лишним (же=4000, а макс -32768/+32767), и, если ускорение сильно зашкаливает, он эти цифры выдаёт, просто у разных каналов при разных ускорениях портится линейность.
А у ADXL312 и ADLX345 диапазон до 12/16 "же", но по оси Z хуже шумы и стабильность.
Б.г.> А у ADXL312 и ADLX345 диапазон до 12/16 "же", но по оси Z хуже шумы и стабильность.
Размышлял:
- вместо того чтобы искать качественными универсальными 3D датчиков, если это финансово и физически осуществимо не было бы лучше, чтобы припаять 3 хороших 1D датчиков - один для каждая оси, где конечно имеется адаптер для оси z?
- также 3D-магнитный датчик, как он не зависит от скорости и ускорения могут быть использован для абсолютных коррекции дрейфа?
Размышлял:
- вместо того чтобы искать качественными универсальными 3D датчиков, если это финансово и физически осуществимо не было бы лучше, чтобы припаять 3 хороших 1D датчиков - один для каждая оси, где конечно имеется адаптер для оси z?
- также 3D-магнитный датчик, как он не зависит от скорости и ускорения могут быть использован для абсолютных коррекции дрейфа?
Это сообщение редактировалось 05.10.2016 в 01:32
SashaMaks>> Получается пуск по горизонту. Тут такие пуски делать запрещено!
Massaraksh> Z - вертикально.
45 градусов всё равно не получается.
Хотя получается, но у меня вопрос: А зачем запускать ракету под углом в 45 градусов???

Massaraksh> Z - вертикально.
45 градусов всё равно не получается.
Хотя получается, но у меня вопрос: А зачем запускать ракету под углом в 45 градусов???
Использование микроэлектромеханических (MEMS) акселерометров в ракетомоделях [SashaMaks#05.10.16 02:14]
… Нарисовал наглядно на примере параболы:// Ракетомодельный
Это сообщение редактировалось 05.10.2016 в 02:15
Реклама Google — средство выживания форумов :)
mihail66> А если взять сумму g в трех осях???
Хорошая идея!
Это позволит максимально увеличить диапазон измерений одного датчика - в 1,732 раза. При этом будет усреднение от трех измерений одновременно, что снизить шумы.
Хорошая идея!
Это позволит максимально увеличить диапазон измерений одного датчика - в 1,732 раза. При этом будет усреднение от трех измерений одновременно, что снизить шумы.
Copyright © Balancer 1997..2019
Создано 15.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 15.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
