 Xan
Xan

 инфо
инфо инструменты
инструменты Бывший генералиссимус
Бывший генералиссимус

 pinko
pinko

 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/40853/128x128-crop/40853_original.png)
Гироскопы и кватернионы
Теги:
Б.г.> Я, в итоге, читаю только каждый восьмой сэмпл, частота обновления 256 герц.
Если понизить частоту до 64, то задержка увеличится на
0.5 / 64 - 0.5 / 256 = 0.005859375 мс.
Это около 1/10 от задержки в машинке.
И k1 надо будет уменьшить всего на 1/10 — колебания станут лишь чуть-чуть больше.
Стоит ли гнаться за большой частотой?
Кстати, у тебя какой МК?
Если понизить частоту до 64, то задержка увеличится на
0.5 / 64 - 0.5 / 256 = 0.005859375 мс.
Это около 1/10 от задержки в машинке.
И k1 надо будет уменьшить всего на 1/10 — колебания станут лишь чуть-чуть больше.
Стоит ли гнаться за большой частотой?
Кстати, у тебя какой МК?



Б.г.>> Я, в итоге, читаю только каждый восьмой сэмпл, частота обновления 256 герц.
Xan> Если понизить частоту до 64, то задержка увеличится на
Будет дробное отношение между частотой обновления гироскопа и частотой обновления машинки, задержка будет плавать. Если понижать, то до 51,2 Гц, так, в принципе, тоже можно.
Xan> Стоит ли гнаться за большой частотой?
Кто ж его знает, моменты инерции неизвестны, управляющие моменты неизвестны.
Xan> Кстати, у тебя какой МК?
ADuC7126
Xan> Если понизить частоту до 64, то задержка увеличится на
Будет дробное отношение между частотой обновления гироскопа и частотой обновления машинки, задержка будет плавать. Если понижать, то до 51,2 Гц, так, в принципе, тоже можно.
Xan> Стоит ли гнаться за большой частотой?
Кто ж его знает, моменты инерции неизвестны, управляющие моменты неизвестны.
Xan> Кстати, у тебя какой МК?
ADuC7126


Б.г.> Суть в том, что часть информации я из-за этого теряю. Думаю, что она неважна для целей управления, но теряю.
Сколько тебе информации нужно, это тебе решать. Я говорю о том, что в то время, пока данные передаются (хоть 90% всего времени), процессор вполне может одновременно с этим отрабатывать математику предыдущих данных.
Сколько тебе информации нужно, это тебе решать. Я говорю о том, что в то время, пока данные передаются (хоть 90% всего времени), процессор вполне может одновременно с этим отрабатывать математику предыдущих данных.


Б.г.> Будет дробное отношение между частотой обновления гироскопа и частотой обновления машинки, задержка будет плавать. Если понижать, то до 51,2 Гц, так, в принципе, тоже можно.
А машинкам же пофиг на частоту, им только длительность импульса нужна.
Можно вообще с плавающей периодичность импульсы давать. От 7 до 20 мс.
Или когда как?
А машинкам же пофиг на частоту, им только длительность импульса нужна.
Можно вообще с плавающей периодичность импульсы давать. От 7 до 20 мс.
Или когда как?
Б.г.>> Будет дробное отношение между частотой обновления гироскопа и частотой обновления машинки, задержка будет плавать. Если понижать, то до 51,2 Гц, так, в принципе, тоже можно.
Xan> А машинкам же пофиг на частоту, им только длительность импульса нужна.
Xan> Можно вообще с плавающей периодичность импульсы давать. От 7 до 20 мс.
Xan> Или когда как?
Да, все машинки разные") Мне обещали, что им пофиг период - оказалось, не пофиг.
Мне обещали, что им пофиг период - оказалось, не пофиг.
Я начинал с атмеги16, там два канала ШИМ от 16-разрядного таймера, а два канала - от 8-разрядного. И выбор частот повторения очень сильно ограничен. При кварце 18432 кГц я мог сделать либо 70 Гц, либо 280 Гц. 280 мне было удобнее на 8-разрядных каналах, потому что скважность меньше и можно большее число кодов использовать. 70 Гц - это 14 мс. Для перебора от 1 до 2 мс годятся только 18 кодов из 256. А на 280 Гц можно использовать уже 72 кода. Но не работает. Я тогда сделал запрет прохождения 3 импульсов из 4, всё работало хорошо.
Между 70 Гц и 280 Гц промежуточные значения штатными средствами, т.е. запрограммировав раз и навсегда регистры, получить было невозможно.
А мне кто-то, не помню, кто, здесь, на форуме, говорил, что у него машинки корректно работали при паузе всего в 1 миллисекунду между импульсами.
То есть, каждую модель надо испытывать, и не факт, что через год или через два машинка, имеющая такой же парт намбер у продавца, не будет себя вести по-другому.
Xan> А машинкам же пофиг на частоту, им только длительность импульса нужна.
Xan> Можно вообще с плавающей периодичность импульсы давать. От 7 до 20 мс.
Xan> Или когда как?
Да, все машинки разные
") Мне обещали, что им пофиг период - оказалось, не пофиг.
Мне обещали, что им пофиг период - оказалось, не пофиг.Я начинал с атмеги16, там два канала ШИМ от 16-разрядного таймера, а два канала - от 8-разрядного. И выбор частот повторения очень сильно ограничен. При кварце 18432 кГц я мог сделать либо 70 Гц, либо 280 Гц. 280 мне было удобнее на 8-разрядных каналах, потому что скважность меньше и можно большее число кодов использовать. 70 Гц - это 14 мс. Для перебора от 1 до 2 мс годятся только 18 кодов из 256. А на 280 Гц можно использовать уже 72 кода. Но не работает. Я тогда сделал запрет прохождения 3 импульсов из 4, всё работало хорошо.
Между 70 Гц и 280 Гц промежуточные значения штатными средствами, т.е. запрограммировав раз и навсегда регистры, получить было невозможно.
А мне кто-то, не помню, кто, здесь, на форуме, говорил, что у него машинки корректно работали при паузе всего в 1 миллисекунду между импульсами.
То есть, каждую модель надо испытывать, и не факт, что через год или через два машинка, имеющая такой же парт намбер у продавца, не будет себя вести по-другому.
Это сообщение редактировалось 25.06.2019 в 12:38
Б.г.>> Будет дробное отношение между частотой обновления гироскопа и частотой обновления машинки, задержка будет плавать. Если понижать, то до 51,2 Гц, так, в принципе, тоже можно.
Подумал, и понял, что неправ - в смысле, можно поднять машинкам частоту до тех же 64 Гц, на которых будет идти опрос гироскопа. Просто, с ШИМ-ом ADuC7126 мне легко было сделать близкую к стандартной частоте 51.2, ну я её и сделал, вдобавок, она получилась привязанной к частоте опроса гироскопа.
У ADuC7126 процессор тактируется от синтезатора, который множит на 1275 исходную частоту часового кварца, 32768 Гц, поэтому к ней очень удобно всё привязывать. Не очень удобно делать стандартные частоты последовательных портов, но для этого там есть дробный синтезатор. Во всяком случае, у меня на 230400 всё работает без потерь данных.
Подумал, и понял, что неправ - в смысле, можно поднять машинкам частоту до тех же 64 Гц, на которых будет идти опрос гироскопа. Просто, с ШИМ-ом ADuC7126 мне легко было сделать близкую к стандартной частоте 51.2, ну я её и сделал, вдобавок, она получилась привязанной к частоте опроса гироскопа.
У ADuC7126 процессор тактируется от синтезатора, который множит на 1275 исходную частоту часового кварца, 32768 Гц, поэтому к ней очень удобно всё привязывать. Не очень удобно делать стандартные частоты последовательных портов, но для этого там есть дробный синтезатор. Во всяком случае, у меня на 230400 всё работает без потерь данных.
Б.г.> У ADuC7126 процессор тактируется от синтезатора, который множит на 1275 исходную частоту часового кварца, 32768 Гц.
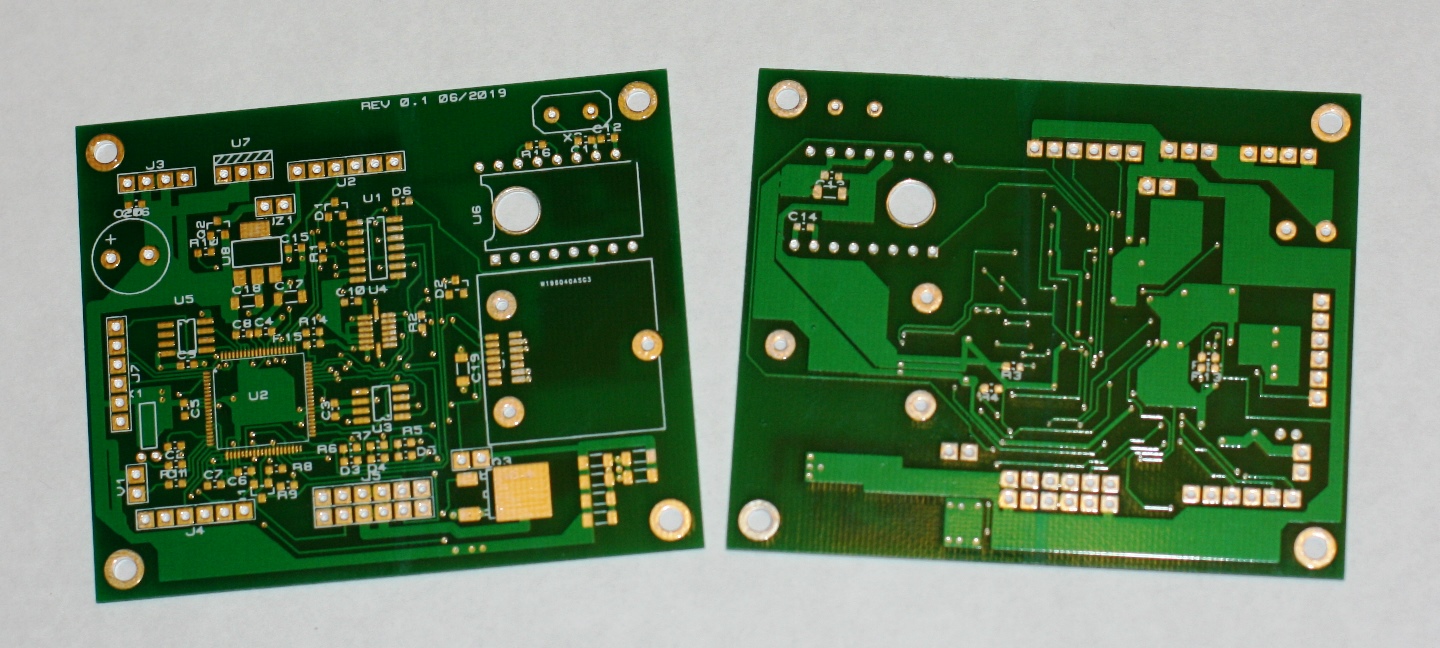
Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
Прикреплённые файлы:

Если речь идет о запуске чего-то солидного, то какой смысл заморачивать с контроллерами вообще? ПЛИС + управляющая нейросеть натренированная RL в симуляторе с любыми задержками, с любым шумом/искривлением входных данных (типа rolling shutter cmos камер). That easy.
Oxandrolone> That easy.
1. Сколько оно будет весить и жрать электричества?
2. Получится ли сделать правильный симулятор для правильной тренировки?
А так-то хорошо бы "вырастить" водителя, который может любой ракетой управлять.
1. Сколько оно будет весить и жрать электричества?
2. Получится ли сделать правильный симулятор для правильной тренировки?
А так-то хорошо бы "вырастить" водителя, который может любой ракетой управлять.
Б.г.> Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
Где, как, почём?
Толщина стеклотекстолита заказывается?
=====
Вот на рулевую машинку подаётся "меандр".
Машинка крутится 60 мс в одну сторону, 60 обратно.
Итого период колебаний 120 мс — 8 Гц — круговая частота w = 2 * pi / 0.12 = 52 рад/с.
Если у микрухи гироскопов максимальная скорость 2000 град/с = 35 рад/с (L3G4200D), то ось ракеты при этих 8-герцовых колебаниях может отклоняться с амплитудой примерно 35 / 52 = 0.67 рад = 38 градусов.
А если максимальная скорость 100 град/с (ADIS16460), то амплитуда получится 1.9 градуса.
К чему это я?
Где, как, почём?
Толщина стеклотекстолита заказывается?
=====
Вот на рулевую машинку подаётся "меандр".
Машинка крутится 60 мс в одну сторону, 60 обратно.
Итого период колебаний 120 мс — 8 Гц — круговая частота w = 2 * pi / 0.12 = 52 рад/с.
Если у микрухи гироскопов максимальная скорость 2000 град/с = 35 рад/с (L3G4200D), то ось ракеты при этих 8-герцовых колебаниях может отклоняться с амплитудой примерно 35 / 52 = 0.67 рад = 38 градусов.
А если максимальная скорость 100 град/с (ADIS16460), то амплитуда получится 1.9 градуса.
К чему это я?
Б.г.>> Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
Xan> Где, как, почём?
pcbway, 5 долларов платы 6 долларов пересылка, 1 комиссия пэйпал. Реально, с учётом курса, комиссий и т.д., вышло 848 рублей. Платы до 100х100 стоят неизменно 5 долларов, но пересылка дорожает от веса. Т.е. если бы я заказал не 5 плат, а 10, пересылка бы стоила уже 8 долларов.
Xan> Толщина стеклотекстолита заказывается?
да.
Xan> Вот на рулевую машинку подаётся "меандр".
Xan> Машинка крутится 60 мс в одну сторону, 60 обратно.
Xan> Итого период колебаний 120 мс — 8 Гц — круговая частота w = 2 * pi / 0.12 = 52 рад/с.
Xan> Если у микрухи гироскопов максимальная скорость 2000 град/с = 35 рад/с (L3G4200D), то ось ракеты при этих 8-герцовых колебаниях может отклоняться с амплитудой примерно 35 / 52 = 0.67 рад = 38 градусов.
Xan> А если максимальная скорость 100 град/с (ADIS16460), то амплитуда получится 1.9 градуса.
Xan> К чему это я?
Не знаю, если честно. 38 градусов с частотой 8 герц для колебаний относительно продольной оси - гарантированное разрушение воздушным потоком.
что же до колебаний по крену, то и их НЕ ДОЛЖНО В НОРМЕ БЫТЬ, в смысле, в процессе НОРМАЛЬНОГО управления. Для АВАРИЙНОГО управления в канале крена у меня дополнительно стоит XV-3700CB с диапазоном до 300 градусов в секунду (выход 1) и до 1500 градусов в секунду (выход 2).
переключение происходит автоматически при приближении к границе диапазона.
И опять ты путаешь угловые скорости и ускорения. Ну перекладываешь ты руль из крайнего в крайнее с частотой 8 Гц. Но руль создаёт только угловое ускорение, а не угловую скороть. Чтобы создать (или погасить) угловую скорость, надо руль подержать в крайнем положении сколько-то времени.
Допустим, располагаемый управляющий момент может создать угловое ускорение в 10000 градусов в секунду в квадрате. Но, даже если руль в крайнем положении стоит 1/16 секунды, это будет всего 625 градусов в секунду, а, поскольку он отклоняется (допустим, управляющий момент зависит линейно от времени, тогда скорость будет квадратично зависеть - накопленная за полпериода угловая скорость будет в 4 раза меньше, т.е. 156,25 градуса в секунду.
Так что, урежь осетра.
Xan> Где, как, почём?
pcbway, 5 долларов платы 6 долларов пересылка, 1 комиссия пэйпал. Реально, с учётом курса, комиссий и т.д., вышло 848 рублей. Платы до 100х100 стоят неизменно 5 долларов, но пересылка дорожает от веса. Т.е. если бы я заказал не 5 плат, а 10, пересылка бы стоила уже 8 долларов.
Xan> Толщина стеклотекстолита заказывается?
да.
Xan> Вот на рулевую машинку подаётся "меандр".
Xan> Машинка крутится 60 мс в одну сторону, 60 обратно.
Xan> Итого период колебаний 120 мс — 8 Гц — круговая частота w = 2 * pi / 0.12 = 52 рад/с.
Xan> Если у микрухи гироскопов максимальная скорость 2000 град/с = 35 рад/с (L3G4200D), то ось ракеты при этих 8-герцовых колебаниях может отклоняться с амплитудой примерно 35 / 52 = 0.67 рад = 38 градусов.
Xan> А если максимальная скорость 100 град/с (ADIS16460), то амплитуда получится 1.9 градуса.
Xan> К чему это я?
Не знаю, если честно. 38 градусов с частотой 8 герц для колебаний относительно продольной оси - гарантированное разрушение воздушным потоком.
что же до колебаний по крену, то и их НЕ ДОЛЖНО В НОРМЕ БЫТЬ, в смысле, в процессе НОРМАЛЬНОГО управления. Для АВАРИЙНОГО управления в канале крена у меня дополнительно стоит XV-3700CB с диапазоном до 300 градусов в секунду (выход 1) и до 1500 градусов в секунду (выход 2).
переключение происходит автоматически при приближении к границе диапазона.
И опять ты путаешь угловые скорости и ускорения. Ну перекладываешь ты руль из крайнего в крайнее с частотой 8 Гц. Но руль создаёт только угловое ускорение, а не угловую скороть. Чтобы создать (или погасить) угловую скорость, надо руль подержать в крайнем положении сколько-то времени.
Допустим, располагаемый управляющий момент может создать угловое ускорение в 10000 градусов в секунду в квадрате. Но, даже если руль в крайнем положении стоит 1/16 секунды, это будет всего 625 градусов в секунду, а, поскольку он отклоняется (допустим, управляющий момент зависит линейно от времени, тогда скорость будет квадратично зависеть - накопленная за полпериода угловая скорость будет в 4 раза меньше, т.е. 156,25 градуса в секунду.
Так что, урежь осетра.
Это сообщение редактировалось 01.07.2019 в 14:38
Oxandrolone>> That easy.
Xan> 1. Сколько оно будет весить и жрать электричества?
А сам как думаешь? Не больше чем серва или полезная нагрузка. Впрочем, это не важно, потому что...
Xan> 2. Получится ли сделать правильный симулятор для правильной тренировки?
Чем точнее симулятор, тем лучше. С другой стороны, нн обученная управлять и-16 сносно управляет и планером, и бомбардирощиком (g4m2).
Сеть - двухслойный перцептрон с 64 нейронами в слое, на входе 20 параметров состояния самолета, на выходе 3 (речь идет о continuous space, когда прямо из нейросети берется сигнал для рулей).
Для такой сети должно и мк хватить вычислять ее 100 раз в секунду, например.
Кстати, сносно работает и descrete space, когда сигнал = {минимум, 0, максимум}, эдакий шим.
Если за штурвал бетти посадить человека, который хотя бы примерно представляет как управлять самолетом, он тоже будет как-то сносно управлять. Потому что представляет, что если нужно повернуть направо, то нужно самолет кренить направо, если нужно вверх то нужно штурвал на себя, если угол маленький то не стоит тащить со всей дури и т.д. Если чуваку посчастливится пережить полет, то следующий раз он будет управлять немного лучше, не смотря на то, что у него кроме глаз других датчиков нет. Так же будет действовать и нейросеть, только намного точнее.
Xan> А так-то хорошо бы "вырастить" водителя, который может любой ракетой управлять.
Do it!
Xan> 1. Сколько оно будет весить и жрать электричества?
А сам как думаешь? Не больше чем серва или полезная нагрузка. Впрочем, это не важно, потому что...
Xan> 2. Получится ли сделать правильный симулятор для правильной тренировки?
Чем точнее симулятор, тем лучше. С другой стороны, нн обученная управлять и-16 сносно управляет и планером, и бомбардирощиком (g4m2).
Сеть - двухслойный перцептрон с 64 нейронами в слое, на входе 20 параметров состояния самолета, на выходе 3 (речь идет о continuous space, когда прямо из нейросети берется сигнал для рулей).
Для такой сети должно и мк хватить вычислять ее 100 раз в секунду, например.
Кстати, сносно работает и descrete space, когда сигнал = {минимум, 0, максимум}, эдакий шим.
Если за штурвал бетти посадить человека, который хотя бы примерно представляет как управлять самолетом, он тоже будет как-то сносно управлять. Потому что представляет, что если нужно повернуть направо, то нужно самолет кренить направо, если нужно вверх то нужно штурвал на себя, если угол маленький то не стоит тащить со всей дури и т.д. Если чуваку посчастливится пережить полет, то следующий раз он будет управлять немного лучше, не смотря на то, что у него кроме глаз других датчиков нет. Так же будет действовать и нейросеть, только намного точнее.
Xan> А так-то хорошо бы "вырастить" водителя, который может любой ракетой управлять.
Do it!
Xan>> Где, как, почём?
Б.г.> pcbway
Эге.
Xan>> К чему это я?
Б.г.> Не знаю, если честно.
Ну, надо со всех сторон общупать задачу.
8 Гц — скорее всего максимальная частота, с которой управлялка может раскачивать ракету.
Дальше завал уже будет очень сильный.
Б.г.> 38 градусов с частотой 8 герц для колебаний относительно продольной оси - гарантированное разрушение воздушным потоком.
Это понятно.
Но хочется знать "чиста тиритицки". Или в вакууме.
Б.г.> И опять ты путаешь угловые скорости и ускорения.
Не. "Предположим, что сможет, тиритицки".
Не вдаваясь в ускоренья.
Б.г.> pcbway
Эге.
Xan>> К чему это я?
Б.г.> Не знаю, если честно.
Ну, надо со всех сторон общупать задачу.
8 Гц — скорее всего максимальная частота, с которой управлялка может раскачивать ракету.
Дальше завал уже будет очень сильный.
Б.г.> 38 градусов с частотой 8 герц для колебаний относительно продольной оси - гарантированное разрушение воздушным потоком.
Это понятно.
Но хочется знать "чиста тиритицки". Или в вакууме.
Б.г.> И опять ты путаешь угловые скорости и ускорения.
Не. "Предположим, что сможет, тиритицки".
Не вдаваясь в ускоренья.
Oxandrolone> Сеть - двухслойный перцептрон с 64 нейронами в слое,
Где это всё взять?
В смысле, инструменты и доки?
У меня знаний только что "существует нейросеть".
Интересно (одноосное) управление, когда сильно изменяется "коэффициент руления". Пожалуй, на пару порядков.
Где это всё взять?
В смысле, инструменты и доки?
У меня знаний только что "существует нейросеть".
Интересно (одноосное) управление, когда сильно изменяется "коэффициент руления". Пожалуй, на пару порядков.
Xan>>> Где, как, почём?
Б.г.>> pcbway
Xan> Эге.
Xan> Xan>> К чему это я?
Б.г.>> Не знаю, если честно.
Xan> Ну, надо со всех сторон общупать задачу.
Xan> 8 Гц — скорее всего максимальная частота, с которой управлялка может раскачивать ракету.
Xan> Дальше завал уже будет очень сильный.
С учётом того, что угол отклонения ракеты - двойной интеграл от углового ускорения (то есть, угла отклонения рулевой машинки), завал и на 8 Гц будет нефигический.
Б.г.>> И опять ты путаешь угловые скорости и ускорения.
Xan> Не. "Предположим, что сможет, тиритицки".
Xan> Не вдаваясь в ускоренья.
Ну как это - не вдаваясь? Амплитуда угловых колебаний, которую может создать рулевая машина, кубично падает с ростом частоты, даже если углы отклонения руля от частоты не зависят. То есть, высотный ветер ВСЯКО отклонит ракету от правильного положения, очень большие там градиенты скороти по высоте, и компенсировать это МГНОВЕННО не просто нельзя, а надо ракете запретить!
Она должна в уме (своём кремниевом) посчитать, как ей вернуться на правильную траекторию плавно, не ломаясь пополам. А, если нельзя вернуться, как ей прибыть как можно ближе к точке бросания, желательно, с заданной в программе скоростью!
А по крену должен быть отдельный контур стабилизации, помимо основного, именно, чтобы предотвращать раскачку, с какой бы скоростью возмущение не вводилось.
Между прочим, на графике, что я выкладывал раньше, приведен график угловой скорости и с основного гироскопа, и с аварийного. Аварийный, конечно, считает погрубее, но, поскольку на него переключение происходит только при более, чем 2 радианах в секунду, то общее время, когда приходится пользоваться его показаниями, не так уж велико, а, значит, и вес его ошибки не так уж значим.
Правда, вес-весом, а, именно потому, что он работает при большой угловой скорости, итоговая ошибка по углу крена оказывается очень даже заметной. Но не смертельной. Даже при перекосе осей рыскания и тангажа на 2-3 градуса в середине активного участка ракета на орбиту выходит. Потому что основной разворот по тангажу уже произошёл. А я надеюсь, что итоговая ошибка будет меньше.
Б.г.>> pcbway
Xan> Эге.
Xan> Xan>> К чему это я?
Б.г.>> Не знаю, если честно.
Xan> Ну, надо со всех сторон общупать задачу.
Xan> 8 Гц — скорее всего максимальная частота, с которой управлялка может раскачивать ракету.
Xan> Дальше завал уже будет очень сильный.
С учётом того, что угол отклонения ракеты - двойной интеграл от углового ускорения (то есть, угла отклонения рулевой машинки), завал и на 8 Гц будет нефигический.
Б.г.>> И опять ты путаешь угловые скорости и ускорения.
Xan> Не. "Предположим, что сможет, тиритицки".
Xan> Не вдаваясь в ускоренья.
Ну как это - не вдаваясь? Амплитуда угловых колебаний, которую может создать рулевая машина, кубично падает с ростом частоты, даже если углы отклонения руля от частоты не зависят. То есть, высотный ветер ВСЯКО отклонит ракету от правильного положения, очень большие там градиенты скороти по высоте, и компенсировать это МГНОВЕННО не просто нельзя, а надо ракете запретить!
Она должна в уме (своём кремниевом) посчитать, как ей вернуться на правильную траекторию плавно, не ломаясь пополам. А, если нельзя вернуться, как ей прибыть как можно ближе к точке бросания, желательно, с заданной в программе скоростью!
А по крену должен быть отдельный контур стабилизации, помимо основного, именно, чтобы предотвращать раскачку, с какой бы скоростью возмущение не вводилось.
Между прочим, на графике, что я выкладывал раньше, приведен график угловой скорости и с основного гироскопа, и с аварийного. Аварийный, конечно, считает погрубее, но, поскольку на него переключение происходит только при более, чем 2 радианах в секунду, то общее время, когда приходится пользоваться его показаниями, не так уж велико, а, значит, и вес его ошибки не так уж значим.
Правда, вес-весом, а, именно потому, что он работает при большой угловой скорости, итоговая ошибка по углу крена оказывается очень даже заметной. Но не смертельной. Даже при перекосе осей рыскания и тангажа на 2-3 градуса в середине активного участка ракета на орбиту выходит. Потому что основной разворот по тангажу уже произошёл. А я надеюсь, что итоговая ошибка будет меньше.
Xan> Где это всё взять?
Xan> В смысле, инструменты и доки?
Xan> У меня знаний только что "существует нейросеть".
Xan> Интересно (одноосное) управление, когда сильно изменяется "коэффициент руления". Пожалуй, на пару порядков.
Learning Dexterity
We’ve trained a human-like robot hand to manipulate physical objects with unprecedented dexterity. Our system, called Dactyl, is trained entirely in simulation and transfers its knowledge to reality, adapting to real-world physics using techniques we’ve been working on for the past year. Dactyl learns from scratch using the same general-purpose reinforcement learning algorithm and code as OpenAI Five.
проще всего отсюда начать:
Xan> В смысле, инструменты и доки?
Xan> У меня знаний только что "существует нейросеть".
Xan> Интересно (одноосное) управление, когда сильно изменяется "коэффициент руления". Пожалуй, на пару порядков.
Learning Dexterity
We’ve trained a human-like robot hand to manipulate physical objects with unprecedented dexterity. Our system, called Dactyl, is trained entirely in simulation and transfers its knowledge to reality, adapting to real-world physics using techniques we’ve been working on for the past year. Dactyl learns from scratch using the same general-purpose reinforcement learning algorithm and code as OpenAI Five.
проще всего отсюда начать:
Б.г.> высотный ветер ВСЯКО отклонит ракету от правильного положения, очень большие там градиенты скороти по высоте, и компенсировать это МГНОВЕННО не просто нельзя, а надо ракете запретить!
Ну так для этого и надо для каждой точки траектории свой k1. "Не более, чем".
Читал про струйные течения. Вычитал, что толщина 2...4 км, скорость часто 50 м/с, пореже 70, но бывает и 100 м/с.
(А в Японии до 200 м/с, но нас это уже не касается!)
При этом в нескольких источниках пишут одинаковую херню: "вертикальный градиент скорости 5 м/с на километр".
Если предположить, что толщина всего 2 км, а скорость аж 100 м/с, и скорость по высоте меняется по плавной кривой, то максимальный градиент будет:
100 м/с / (2000 м / 2) * 2 = 0.2 м/с на метр высоты = 100 м/с на 500 метров.
Если ракета летит со скоростью 1000 м/с, то угол обтекания будет меняться со скоростью:
(100 м/с / 1000 м/с) рад / (500 м / 1000 м/с) = 0.2 рад/с
Скорость ракеты, как видно, сокращается, радианы в секунду будут одинаковые для разных скоростей.
Толщину струи и скорость я взял экстремальные, скорее, толщина будет больше и/или скорость будет меньше.
Так что максимальную скорость изменения угла обтекания можно принять равной 0.1 рад/с.
Низкие струйные течения на высоте примерно до 14 км, стратосферные в районе 30 км.
Влияние по высоте будет примерно одинаковым, так как скорость должна быть такой, чтоб скоростной напор был примерно постоянным.
Если ракета с большущими стабилизаторами, то она постарается развернуться по ветру. И, скорее всего, по инерции проскочит положение равновесия и угловая скорость получится больше, чем эти 0.1 рад/с.
Однако устойчивость ракеты должна быть примерно около нуля, чтоб рулить было легче.
А тогда при попадании в струю будет быстро меняться только угол обтекания, а не поворот ракеты. При нулевой устойчивости она вообще не повернётся.
Так что вот: ветер даст не более 0.1 рад/с. Щястие!
Ну так для этого и надо для каждой точки траектории свой k1. "Не более, чем".
Читал про струйные течения. Вычитал, что толщина 2...4 км, скорость часто 50 м/с, пореже 70, но бывает и 100 м/с.
(А в Японии до 200 м/с, но нас это уже не касается!
)При этом в нескольких источниках пишут одинаковую херню: "вертикальный градиент скорости 5 м/с на километр".
Если предположить, что толщина всего 2 км, а скорость аж 100 м/с, и скорость по высоте меняется по плавной кривой, то максимальный градиент будет:
100 м/с / (2000 м / 2) * 2 = 0.2 м/с на метр высоты = 100 м/с на 500 метров.
Если ракета летит со скоростью 1000 м/с, то угол обтекания будет меняться со скоростью:
(100 м/с / 1000 м/с) рад / (500 м / 1000 м/с) = 0.2 рад/с
Скорость ракеты, как видно, сокращается, радианы в секунду будут одинаковые для разных скоростей.
Толщину струи и скорость я взял экстремальные, скорее, толщина будет больше и/или скорость будет меньше.
Так что максимальную скорость изменения угла обтекания можно принять равной 0.1 рад/с.
Низкие струйные течения на высоте примерно до 14 км, стратосферные в районе 30 км.
Влияние по высоте будет примерно одинаковым, так как скорость должна быть такой, чтоб скоростной напор был примерно постоянным.
Если ракета с большущими стабилизаторами, то она постарается развернуться по ветру. И, скорее всего, по инерции проскочит положение равновесия и угловая скорость получится больше, чем эти 0.1 рад/с.
Однако устойчивость ракеты должна быть примерно около нуля, чтоб рулить было легче.
А тогда при попадании в струю будет быстро меняться только угол обтекания, а не поворот ракеты. При нулевой устойчивости она вообще не повернётся.
Так что вот: ветер даст не более 0.1 рад/с. Щястие!

Б.г.> pcbway, 5 долларов платы 6 долларов пересылка, 1 комиссия пэйпал. Реально, с учётом курса, комиссий и т.д., вышло 848 рублей. Платы до 100х100 стоят неизменно 5 долларов, но пересылка дорожает от веса. Т.е. если бы я заказал не 5 плат, а 10, пересылка бы стоила уже 8 долларов.
Я перешел из pcbway на jlcpcb. Цена такая же, но у них есть скидка на печатные платы 50x50 или меньше. 2 долларов платы 6 долларов пересылка, нет комиссия пэйпал.
Я перешел из pcbway на jlcpcb. Цена такая же, но у них есть скидка на печатные платы 50x50 или меньше. 2 долларов платы 6 долларов пересылка, нет комиссия пэйпал.
Прикреплённые файлы:

Б.г.>> У ADuC7126 процессор тактируется от синтезатора, который множит на 1275 исходную частоту часового кварца, 32768 Гц.
Б.г.> Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
_suworov ?!
Б.г.> Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
_suworov ?!
Б.г.>>> У ADuC7126 процессор тактируется от синтезатора, который множит на 1275 исходную частоту часового кварца, 32768 Гц.
Б.г.>> Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
Tangaroa> suworov ?!
suvorow, если ты имеешь в виду ЖЖ, совершенно верно.
Б.г.>> Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
Tangaroa> suworov ?!
suvorow, если ты имеешь в виду ЖЖ, совершенно верно.
Б.г.>>>> У ADuC7126 процессор тактируется от синтезатора, который множит на 1275 исходную частоту часового кварца, 32768 Гц.
Б.г.> Б.г.>> Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
Tangaroa>> suworov ?!
Б.г.> suvorow, если ты имеешь в виду ЖЖ, совершенно верно.
Иэх. А я до своих чудо-гироскопов всё никак не доберусь.
А теперь ещё и проблемы с покупкой деталек (хорошо что АЦП успел таки приобрести).
Б.г.> Б.г.>> Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
Tangaroa>> suworov ?!
Б.г.> suvorow, если ты имеешь в виду ЖЖ, совершенно верно.
Иэх. А я до своих чудо-гироскопов всё никак не доберусь.
А теперь ещё и проблемы с покупкой деталек (хорошо что АЦП успел таки приобрести).
Б.г.>>>>> У ADuC7126 процессор тактируется от синтезатора, который множит на 1275 исходную частоту часового кварца, 32768 Гц.
Б.г.>> Б.г.>> Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
Tangaroa> Tangaroa>> suworov ?!
Б.г.>> suvorow, если ты имеешь в виду ЖЖ, совершенно верно.
Tangaroa> Иэх. А я до своих чудо-гироскопов всё никак не доберусь.
Tangaroa> А теперь ещё и проблемы с покупкой деталек (хорошо что АЦП успел таки приобрести).
А хочешь, я отдам тебе платку с SCC1300, таким же, как у тех финно-румынов был? У него 2 отдельных SPI интерфейса с разными протоколами, один - для акселерометра, другой - для, собственно, гироскопа. Я не смог с гироскопом нормально разобраться, может, у тебя получится? тогда ты свою методику можешь отработать. А, когда соберёшь свой комплект, перенесёшь эксперименты на него.
Б.г.>> Б.г.>> Не прошло и трёх лет, как я дозрел до заказа печатных плат в Китае
Tangaroa> Tangaroa>> suworov ?!
Б.г.>> suvorow, если ты имеешь в виду ЖЖ, совершенно верно.
Tangaroa> Иэх. А я до своих чудо-гироскопов всё никак не доберусь.
Tangaroa> А теперь ещё и проблемы с покупкой деталек (хорошо что АЦП успел таки приобрести).
А хочешь, я отдам тебе платку с SCC1300, таким же, как у тех финно-румынов был? У него 2 отдельных SPI интерфейса с разными протоколами, один - для акселерометра, другой - для, собственно, гироскопа. Я не смог с гироскопом нормально разобраться, может, у тебя получится? тогда ты свою методику можешь отработать. А, когда соберёшь свой комплект, перенесёшь эксперименты на него.
Б.г.> А хочешь, я отдам тебе платку с SCC1300, таким же, как у тех финно-румынов был? У него 2 отдельных SPI интерфейса с разными протоколами, один - для акселерометра, другой - для, собственно, гироскопа. Я не смог с гироскопом нормально разобраться, может, у тебя получится? тогда ты свою методику можешь отработать. А, когда соберёшь свой комплект, перенесёшь эксперименты на него.
Дилемма: это было бы здорово, заполучить такую штуку, но
я не знаю, когда реально "дойдут руки" до этого эксперимента, а валяющаяся без дела железяка не приносит пользы
Дилемма: это было бы здорово, заполучить такую штуку, но
я не знаю, когда реально "дойдут руки" до этого эксперимента, а валяющаяся без дела железяка не приносит пользы
Xan> Если ракета с большущими стабилизаторами, то она постарается развернуться по ветру.
Нет, аэродинамически устойчивая ракета постарается развернуться против ветра.
Xan> Однако устойчивость ракеты должна быть примерно около нуля, чтоб рулить было легче.
Xan> А тогда при попадании в струю будет быстро меняться только угол обтекания, а не поворот ракеты. При нулевой устойчивости она вообще не повернётся.
Нет. При "истинно" нулевой устойчивости, за счёт градиента скорости течения примерно около 0,5 м/с по длине ракеты на "верхнюю" часть ракеты аэродинамические силы действуют больше, покуда она "входит" в течение, соответственно, ракета с нулевой устойчивостью будет уваливаться под ветер, покуда не долетит до слоя максимальной скорости, а затем - разворачиваться против ветра, пока будет выходить из течения.
При этом накопленные углы будут разными за счёт того, что ракета пролетает "вход" и "выход" за разное время, даже если профиль по высоте симметричен.
0,5 м/с кажется, конечно, ничтожным, но у нас и ракета лёгкая. На "больших" ракетах величина этой разницы значительно больше, и плечо тоже больше, поэтому ограничения по высотному ветру приходится учитывать на больших ракетах тоже.
Нет, аэродинамически устойчивая ракета постарается развернуться против ветра.
Xan> Однако устойчивость ракеты должна быть примерно около нуля, чтоб рулить было легче.
Xan> А тогда при попадании в струю будет быстро меняться только угол обтекания, а не поворот ракеты. При нулевой устойчивости она вообще не повернётся.
Нет. При "истинно" нулевой устойчивости, за счёт градиента скорости течения примерно около 0,5 м/с по длине ракеты на "верхнюю" часть ракеты аэродинамические силы действуют больше, покуда она "входит" в течение, соответственно, ракета с нулевой устойчивостью будет уваливаться под ветер, покуда не долетит до слоя максимальной скорости, а затем - разворачиваться против ветра, пока будет выходить из течения.
При этом накопленные углы будут разными за счёт того, что ракета пролетает "вход" и "выход" за разное время, даже если профиль по высоте симметричен.
0,5 м/с кажется, конечно, ничтожным, но у нас и ракета лёгкая. На "больших" ракетах величина этой разницы значительно больше, и плечо тоже больше, поэтому ограничения по высотному ветру приходится учитывать на больших ракетах тоже.
Реклама Google — средство выживания форумов :)
Xan>> Если ракета с большущими стабилизаторами, то она постарается развернуться по ветру.
Б.г.> Нет, аэродинамически устойчивая ракета постарается развернуться против ветра.
А, это я в морских терминах путаюсь!
"В новое устойчивое положение".
Б.г.> Нет. При "истинно" нулевой устойчивости, за счёт градиента скорости течения примерно около 0,5 м/с по длине ракеты
Не, не так сильно.
Или у тебя есть фактические данные по градиенту?
Тогда расскажи, а то всё вики да вики!
Скорее всего профиль "скорость от высоты" в течении плавный, например, как функция
v(h) = v0 * (1 - cos(2 * pi * h / h0))
где h0 — толщина течения,
или какой-нибудь подобный,
тогда максимальный градиент скорости будет небольшой, примерно 4 * v0 / h0.
Для течения толщиной 4 км и скоростью 100 м/с градиент получится около 4 * 100 / 4000 = 0.1 м/с на метр.
Если ракета эффективной длиной 1 метр, то она будет разворачиваться со скоростью 0.1 рад/с.
Это если она хорошо цепляется за воздух.
А, длина ракеты сокращается, скорость разворота не зависит от длины ракеты.
Б.г.> но у нас и ракета лёгкая.
Кстати, а сколько нас всего? Ну, в бывшем СССР?
Кто хочет до космоса добраться?
Б.г.> Нет, аэродинамически устойчивая ракета постарается развернуться против ветра.
А, это я в морских терминах путаюсь!
"В новое устойчивое положение".
Б.г.> Нет. При "истинно" нулевой устойчивости, за счёт градиента скорости течения примерно около 0,5 м/с по длине ракеты
Не, не так сильно.
Или у тебя есть фактические данные по градиенту?
Тогда расскажи, а то всё вики да вики!

Скорее всего профиль "скорость от высоты" в течении плавный, например, как функция
v(h) = v0 * (1 - cos(2 * pi * h / h0))
где h0 — толщина течения,
или какой-нибудь подобный,
тогда максимальный градиент скорости будет небольшой, примерно 4 * v0 / h0.
Для течения толщиной 4 км и скоростью 100 м/с градиент получится около 4 * 100 / 4000 = 0.1 м/с на метр.
Если ракета эффективной длиной 1 метр, то она будет разворачиваться со скоростью 0.1 рад/с.
Это если она хорошо цепляется за воздух.
А, длина ракеты сокращается, скорость разворота не зависит от длины ракеты.
Б.г.> но у нас и ракета лёгкая.
Кстати, а сколько нас всего? Ну, в бывшем СССР?
Кто хочет до космоса добраться?
Copyright © Balancer 1997..2020
Создано 22.06.2019
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 22.06.2019
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
