 SashaMaks
SashaMaks


 инфо
инфо инструменты
инструменты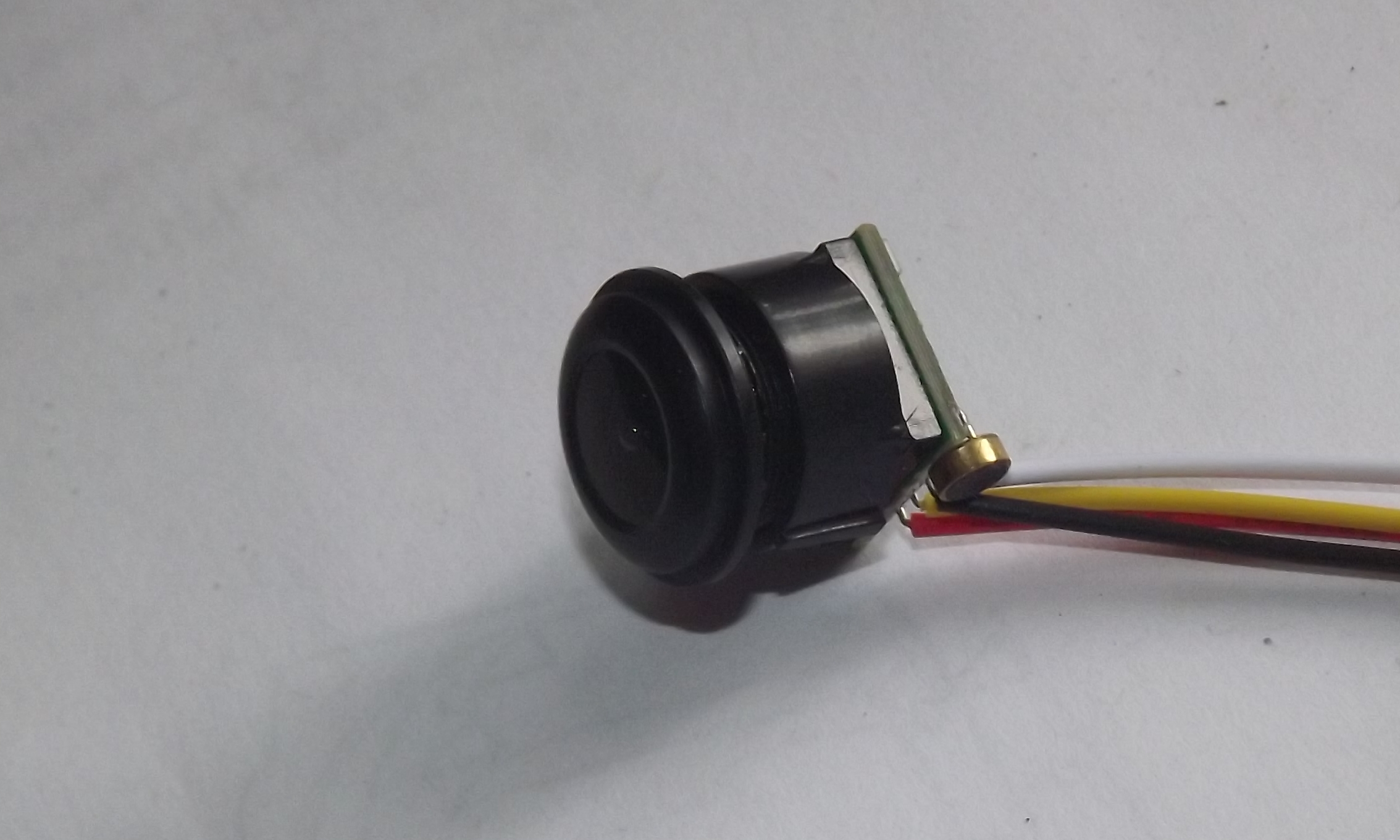


 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/var/www/files.balancer.ru/files/forums/attaches/2021/08/128x128-crop/02-9919769-simulyator-002.png)
Высотные ракеты SashaMaks II
Мой проект высотных ракет.Теги:
SashaMaks>> Мала будет, объектив рыбий-глаз.
Mihail66> Это я маленькую предложил, там и большие есть. Но нахрена такую дуринду на ветер высовывать?
Она очень небольшая, наплыв будет совсем небольшим.
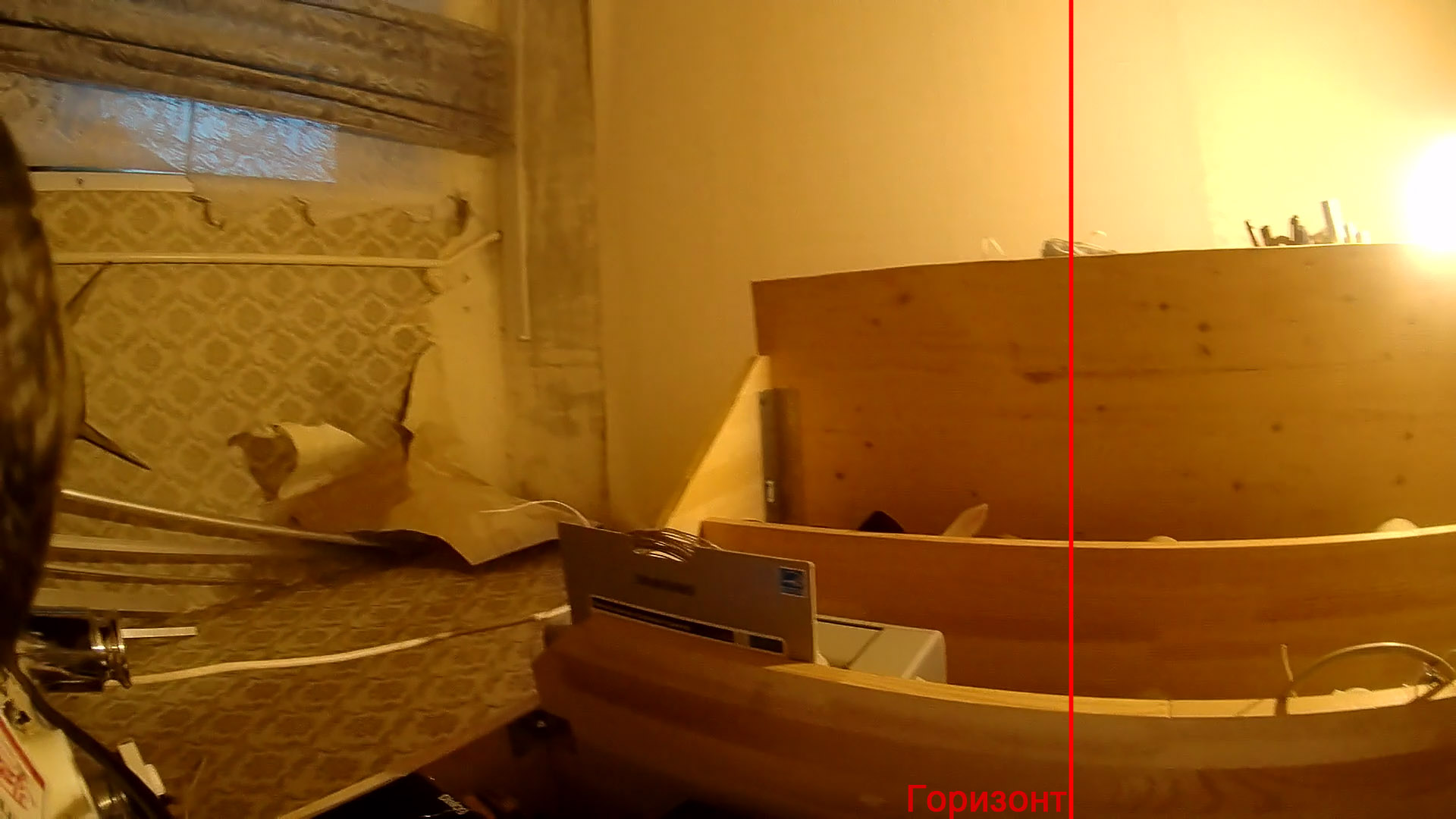
Вот два варианта с простым поворотом камеры:
1. Горизонтально угол примерно 50° от оси ракеты;
2. Вертикально угол примерно 35° от оси ракеты.
Второй вариант совсем незаметный получается и всё в кадр влезает: и хвост ракеты и горизонт с запасом и никаких призм и зеркал не надо. Тут такой объектив очень удачно подходит.
И это уже кадры с вчерашнего первого теста алгоритма на железе. Всё работает!
Дальше калибровка и сборка блока электроники.
Хотя надо прежде всё зафиксировать, а то даже схемы подключния нет, а уже после первого полёта всё может пропасть, и изобретать все заново очень не хочется)))
Mihail66> Это я маленькую предложил, там и большие есть. Но нахрена такую дуринду на ветер высовывать?
Она очень небольшая, наплыв будет совсем небольшим.
Вот два варианта с простым поворотом камеры:
1. Горизонтально угол примерно 50° от оси ракеты;
2. Вертикально угол примерно 35° от оси ракеты.
Второй вариант совсем незаметный получается и всё в кадр влезает: и хвост ракеты и горизонт с запасом и никаких призм и зеркал не надо. Тут такой объектив очень удачно подходит.
И это уже кадры с вчерашнего первого теста алгоритма на железе. Всё работает!
Дальше калибровка и сборка блока электроники.
Хотя надо прежде всё зафиксировать, а то даже схемы подключния нет, а уже после первого полёта всё может пропасть, и изобретать все заново очень не хочется)))



SashaMaks> Второй вариант совсем незаметный получается и всё в кадр влезает: и хвост ракеты и горизонт с запасом и никаких призм и зеркал не надо. Тут такой объектив очень удачно подходит.
Да! Такой ракурс очень даже неплохо.
А покажи, как при этом камера торчит из ракеты?
Да! Такой ракурс очень даже неплохо.
А покажи, как при этом камера торчит из ракеты?
Mihail66> А покажи, как при этом камера торчит из ракеты?
Теперь можно и компановку БРЭО делать.
Теперь можно и компановку БРЭО делать.
Прикреплённые файлы:
DSC_39020.mp4 (скачать)
[2,5 МБ]
SashaMaks> Теперь можно и компановку БРЭО делать.
Огромное спасибо, очень наглядно.
Значит можно просто небольшой обтекатель ей устроить. У Димки есть камера с таким же объектовом, и мы даже хотели использовать ее в качестве FPV на 5,8ГГц, но потом ее долго примеряли и почему-то передумали. Попробуем рассмотреть такой вариант.
Огромное спасибо, очень наглядно.
Значит можно просто небольшой обтекатель ей устроить. У Димки есть камера с таким же объектовом, и мы даже хотели использовать ее в качестве FPV на 5,8ГГц, но потом ее долго примеряли и почему-то передумали. Попробуем рассмотреть такой вариант.
Прикреплённые файлы:
SashaMaks> Теперь можно и компановку БРЭО делать.
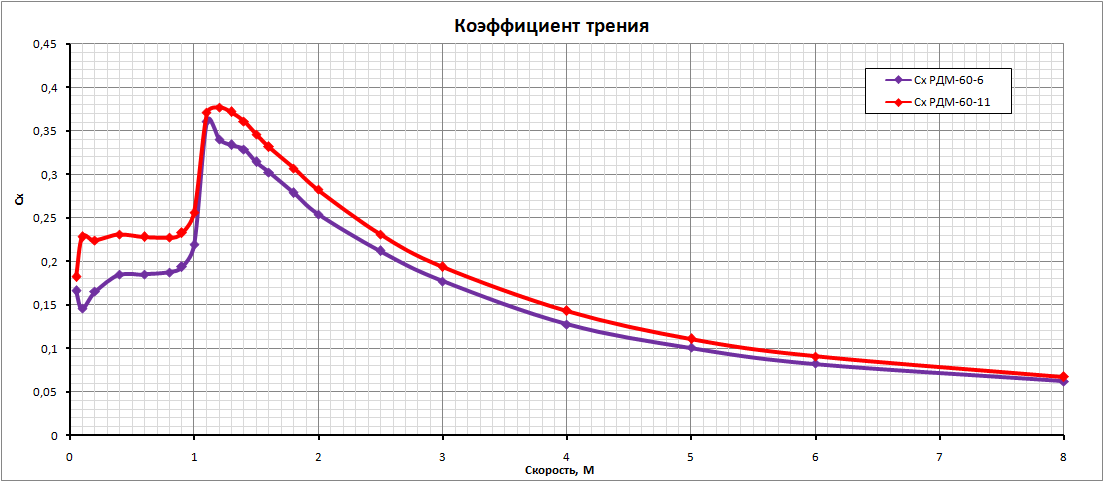
Сделал предварительный расчёт аэродинамики для ракет с удлиненями двигателей 6 и 11.
Сделал предварительный расчёт аэродинамики для ракет с удлиненями двигателей 6 и 11.
Прикреплённые файлы:
SashaMaks>> Теперь можно и компановку БРЭО делать.
SashaMaks> Сделал предварительный расчёт аэродинамики для ракет с удлиненями двигателей 6 и 11.
Расчёт для РМ-65-6:
SashaMaks> Сделал предварительный расчёт аэродинамики для ракет с удлиненями двигателей 6 и 11.
Расчёт для РМ-65-6:
Прикреплённые файлы:
SashaMaks>>> Теперь можно и компановку БРЭО делать.
SashaMaks>> Сделал предварительный расчёт аэродинамики для ракет с удлиненями двигателей 6 и 11.
SashaMaks> Расчёт для РМ-65-6:
Расчёт для РМ-65-11:
SashaMaks>> Сделал предварительный расчёт аэродинамики для ракет с удлиненями двигателей 6 и 11.
SashaMaks> Расчёт для РМ-65-6:
Расчёт для РМ-65-11:
Прикреплённые файлы:

SashaMaks>>>> Теперь можно и компановку БРЭО делать.
КомпОновку
SashaMaks> SashaMaks>> Сделал предварительный расчёт аэродинамики для ракет с удлиненями двигателей 6 и 11.
SashaMaks>> Расчёт для РМ-65-6:
SashaMaks> Расчёт для РМ-65-11:
И какой результат? Когда в небо то уже?
КомпОновку
SashaMaks> SashaMaks>> Сделал предварительный расчёт аэродинамики для ракет с удлиненями двигателей 6 и 11.
SashaMaks>> Расчёт для РМ-65-6:
SashaMaks> Расчёт для РМ-65-11:
И какой результат? Когда в небо то уже?
Skyangel> И какой результат?
Там всё посчитано.
Skyangel> Когда в небо то уже?
Скоро.
Там всё посчитано.
Skyangel> Когда в небо то уже?
Скоро.

Skyangel>> Когда в небо то уже?
SashaMaks> Скоро.
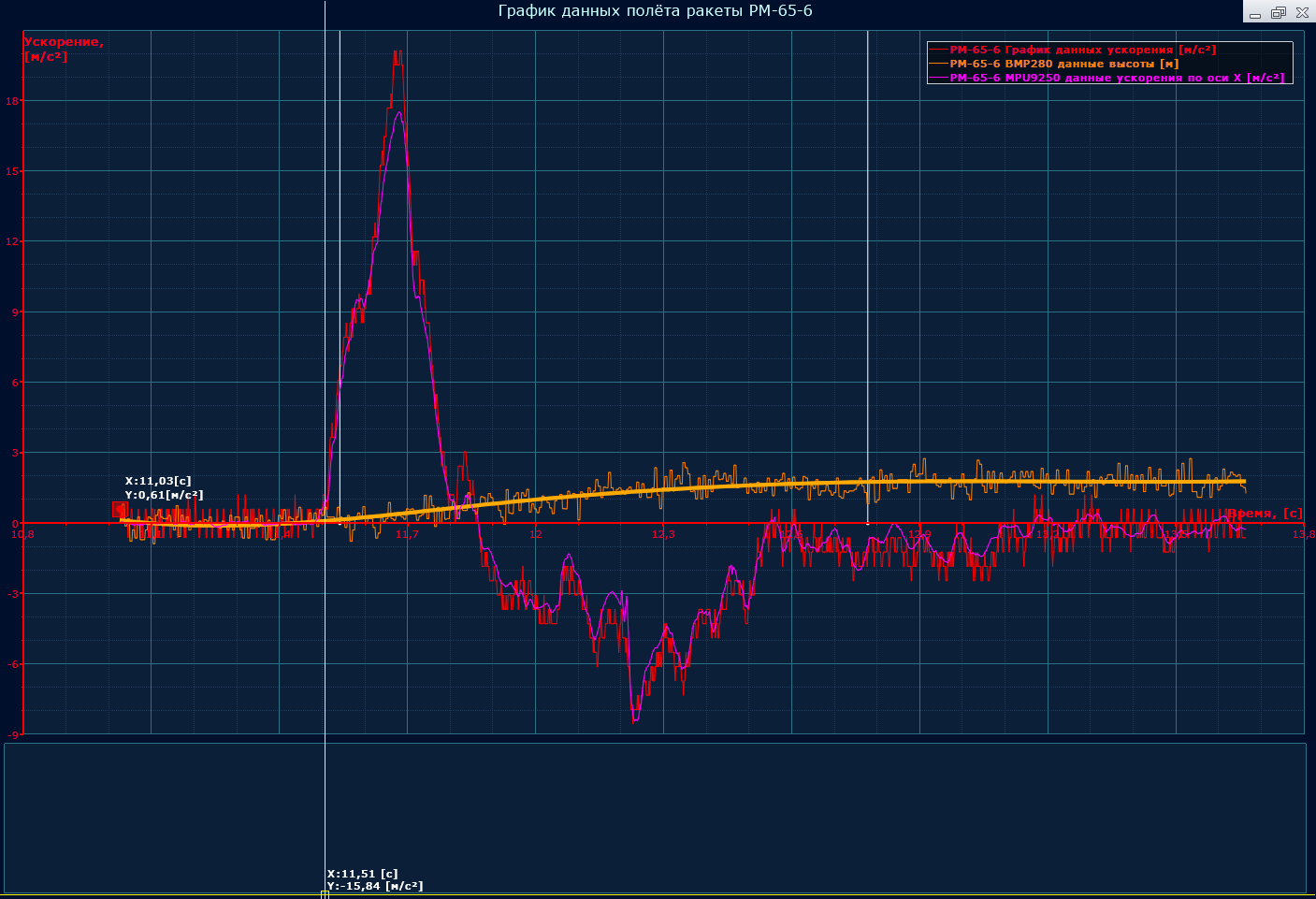
(Использование микроэлектромеханических (MEMS) акселерометров в ракетомоделях [SashaMaks#19.08.21 10:58])
Делаю финальные тестирования уже почти полностью готового блока электроники для ракеты.
Одноосевой акселерометр, прекрасно работает, как датчик апогея.
Это уже реальный тест в железе, пока ещё не всё готово, но главное, что скорость реакции очень высокая, порядка 0,04с при том, что "тяга" от моей руки длилась всего 0,3с.
И да - это тест в комнате, где я просто поднял блок вверх на 1,5м, что так же зафиксировал и BMP280.
А вот акселерометр MPU9250 замечательно дублирует мой датчик и фактически калибрует его своими показаниями в диапазоне до 16G в то время, как мой аналоговый акселерометр способен при этом измерять перегрузки до ±100G или даже до ±150G.
Две белые линии - это сведения о срабатывании логики алгоритма при определении старта и апогея, т.е. гипотетическая ракета была успешно спасена с высоты 1,5м всего лишь!
SashaMaks> Скоро.
(Использование микроэлектромеханических (MEMS) акселерометров в ракетомоделях [SashaMaks#19.08.21 10:58])
Делаю финальные тестирования уже почти полностью готового блока электроники для ракеты.
Одноосевой акселерометр, прекрасно работает, как датчик апогея.
Это уже реальный тест в железе, пока ещё не всё готово, но главное, что скорость реакции очень высокая, порядка 0,04с при том, что "тяга" от моей руки длилась всего 0,3с.
И да - это тест в комнате, где я просто поднял блок вверх на 1,5м, что так же зафиксировал и BMP280.
А вот акселерометр MPU9250 замечательно дублирует мой датчик и фактически калибрует его своими показаниями в диапазоне до 16G в то время, как мой аналоговый акселерометр способен при этом измерять перегрузки до ±100G или даже до ±150G.
Две белые линии - это сведения о срабатывании логики алгоритма при определении старта и апогея, т.е. гипотетическая ракета была успешно спасена с высоты 1,5м всего лишь!

Прикреплённые файлы:
SashaMaks>> Скоро.
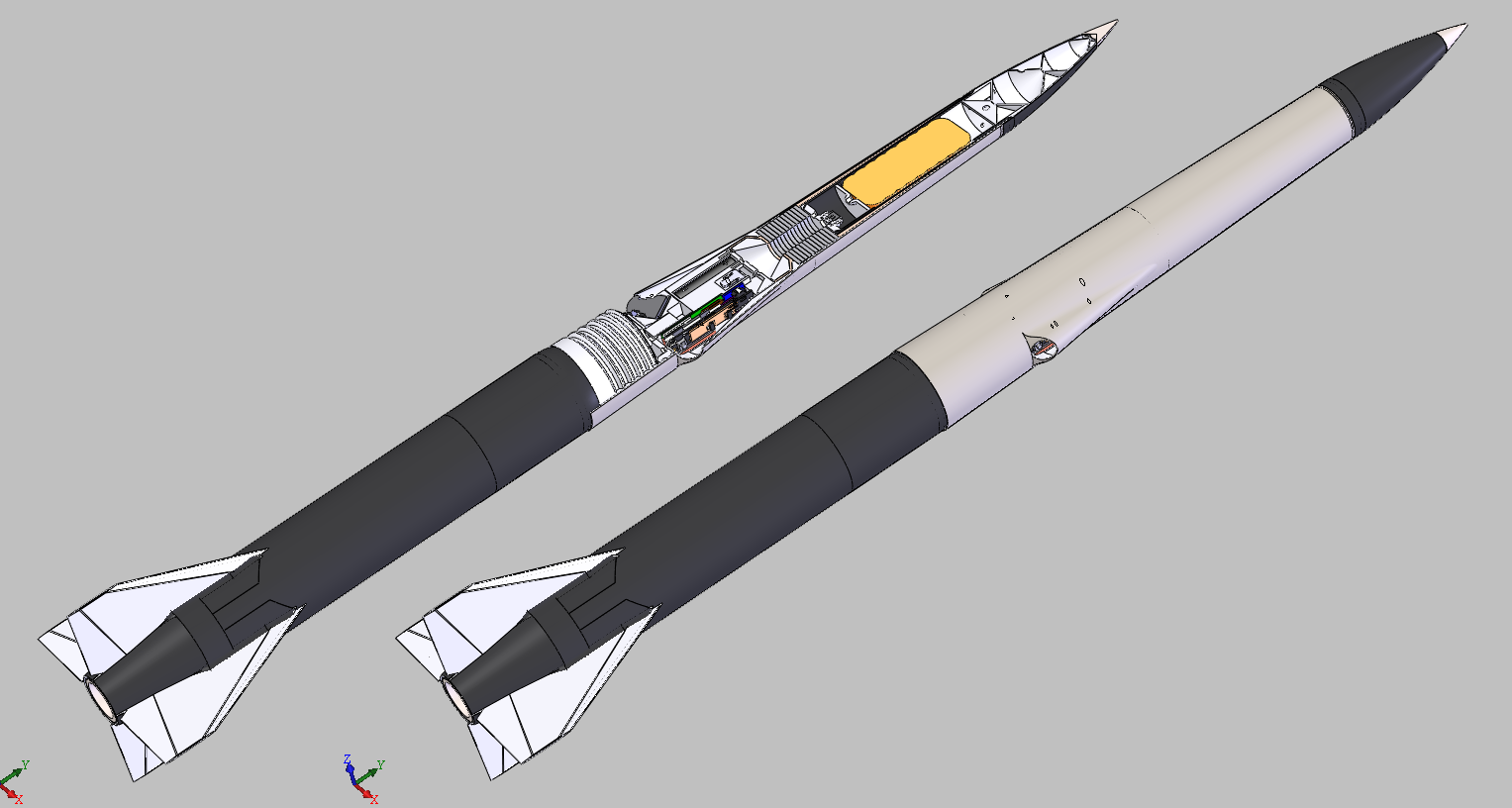
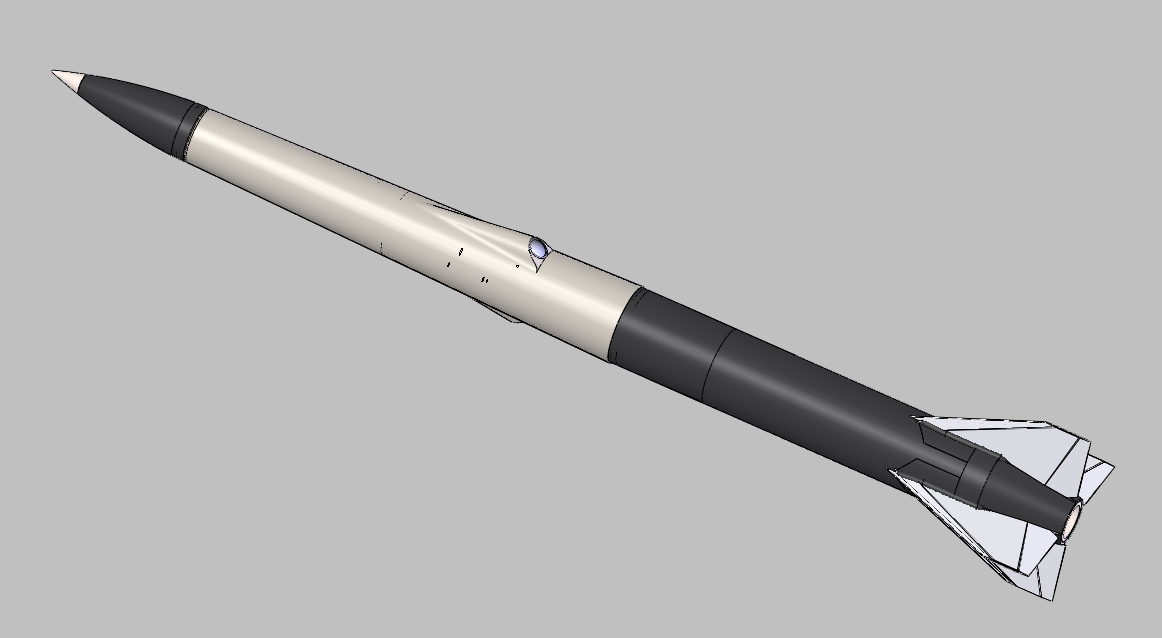
Ну вот, вроде общая компоновка ракеты закончена, большая часть узлов и деталей уже собрана, скоро и финальные тесты системы спасения. Теперь даже вакуумную камеру для этого делать не надо, а чувствительность самодельного акселерометра позволяет провести такой тест простым поднятием головной части вверх...
Ну вот, вроде общая компоновка ракеты закончена, большая часть узлов и деталей уже собрана, скоро и финальные тесты системы спасения. Теперь даже вакуумную камеру для этого делать не надо, а чувствительность самодельного акселерометра позволяет провести такой тест простым поднятием головной части вверх...
Прикреплённые файлы:
Камера установлена в наплыве слева, а в аналогичном симметричном наплыве справа (сделано для минимизации дестабилизирующих моментов) просто пара кнопок для включения и управления ракетой. Запуск и полёт полностью автоматизированы, как было и в последнем запуске - управляется всё (запуск двигателя и выброс парашюта) с БРЭО.
Прикреплённые файлы:
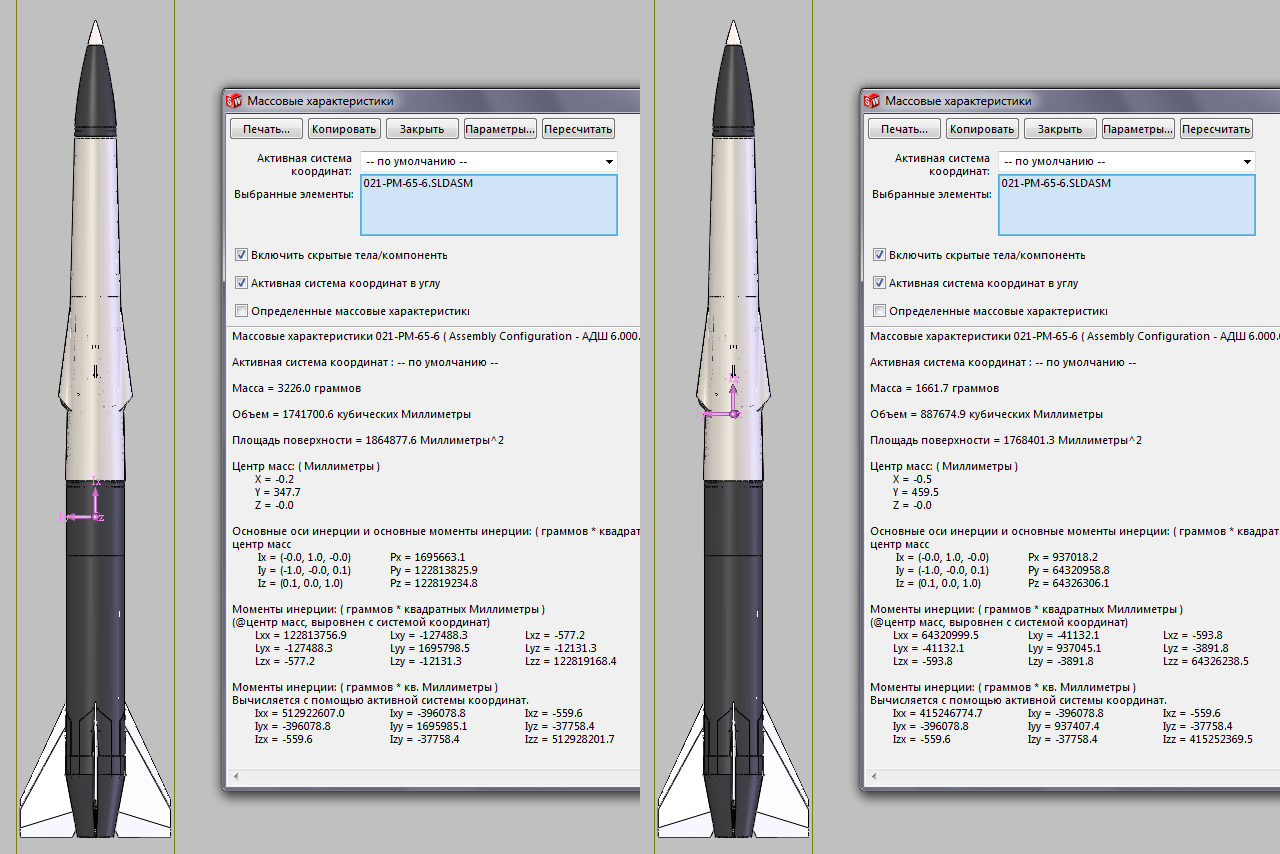
Изменение положения координаты ЦМ ракеты до и после работы двигателя.
Прикреплённые файлы:
SashaMaks> Изменение положения координаты ЦМ ракеты до и после работы двигателя.
Ух какая красота!
Но я все же думал, что потроха будут меньше места занимать, а здесь мотор отнимает меньше половины объема.
Массовый довесок будет ставиться?
Или собираешься в легком варианте пустить, чтобы в полной мере скорость прочувствовать?
Масса топлива примерно 1,56кг?
Ух какая красота!
Но я все же думал, что потроха будут меньше места занимать, а здесь мотор отнимает меньше половины объема.
Массовый довесок будет ставиться?
Или собираешься в легком варианте пустить, чтобы в полной мере скорость прочувствовать?
Масса топлива примерно 1,56кг?
Это сообщение редактировалось 07.09.2021 в 12:04
Mihail66> Массовый довесок будет ставиться?
Он там уже есть и в двух местах, один фиксированный, другой подстроечный.
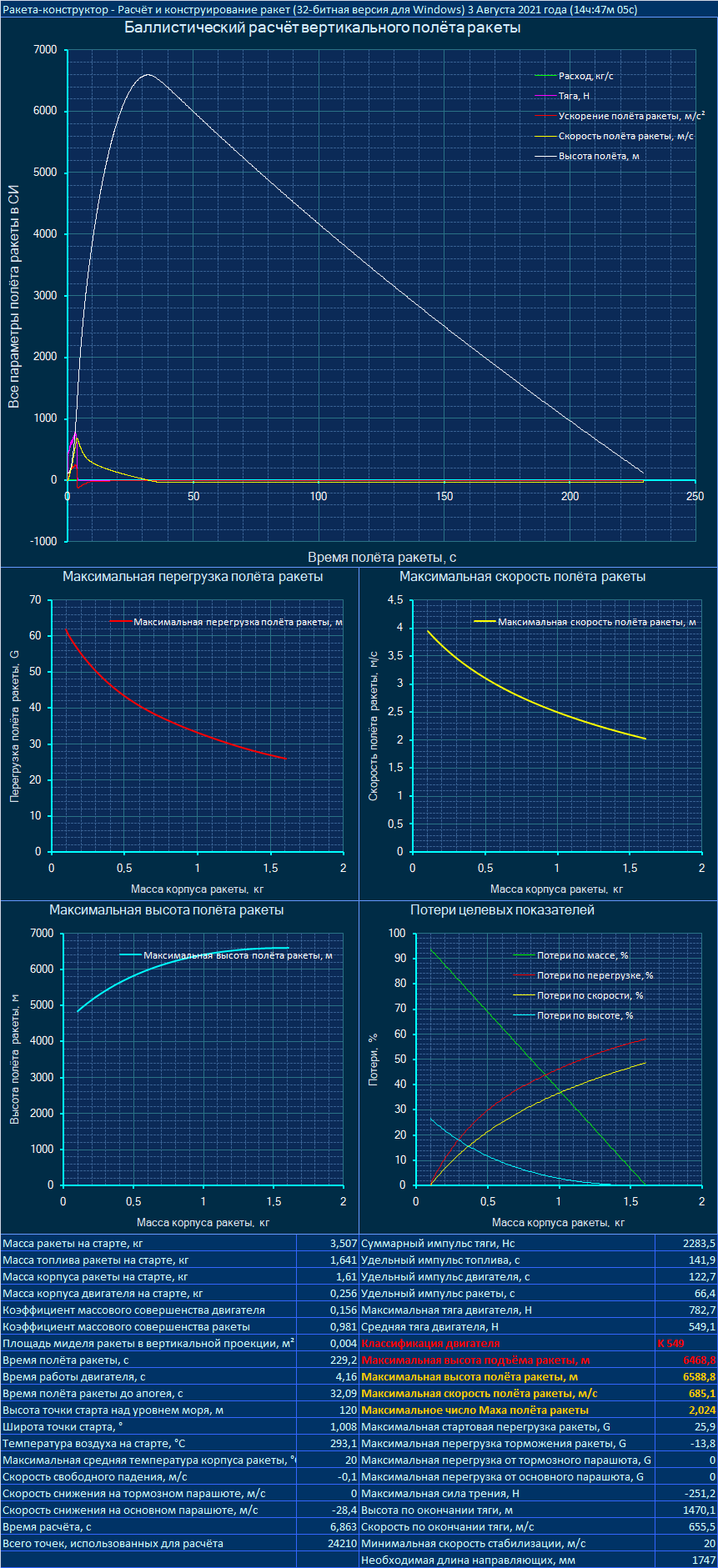
Mihail66> Или собираешься в легком варианте пустить, чтобы в полной мере скорость прочувствовать?
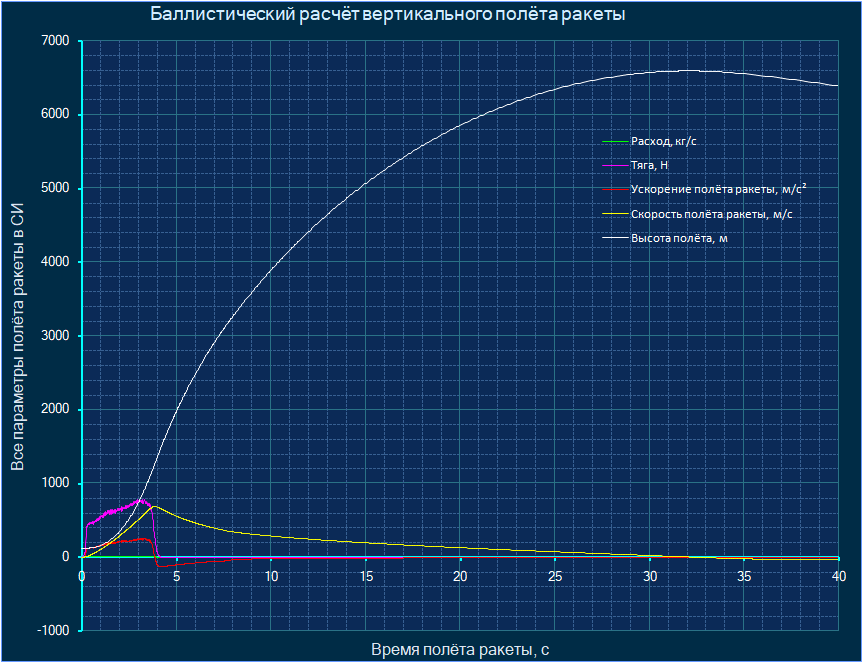
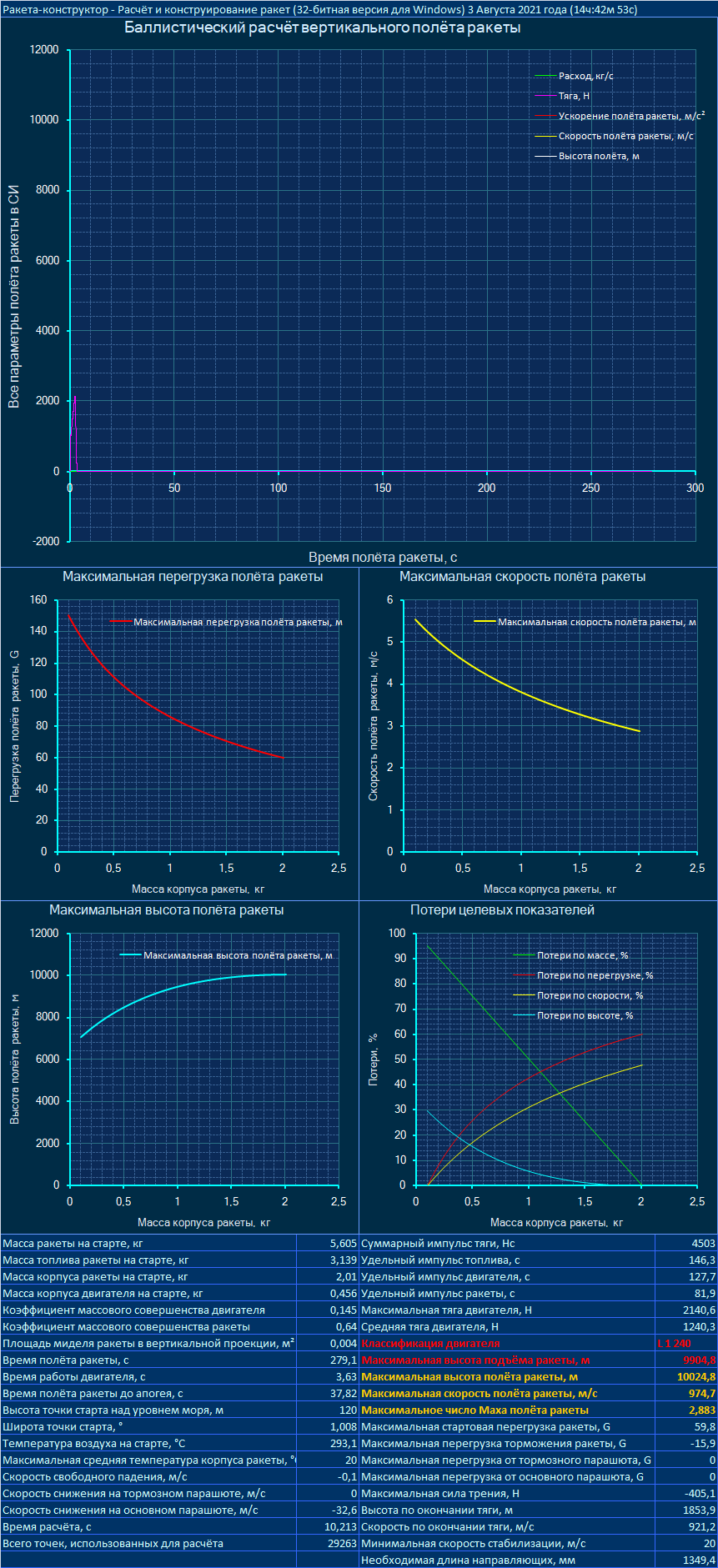
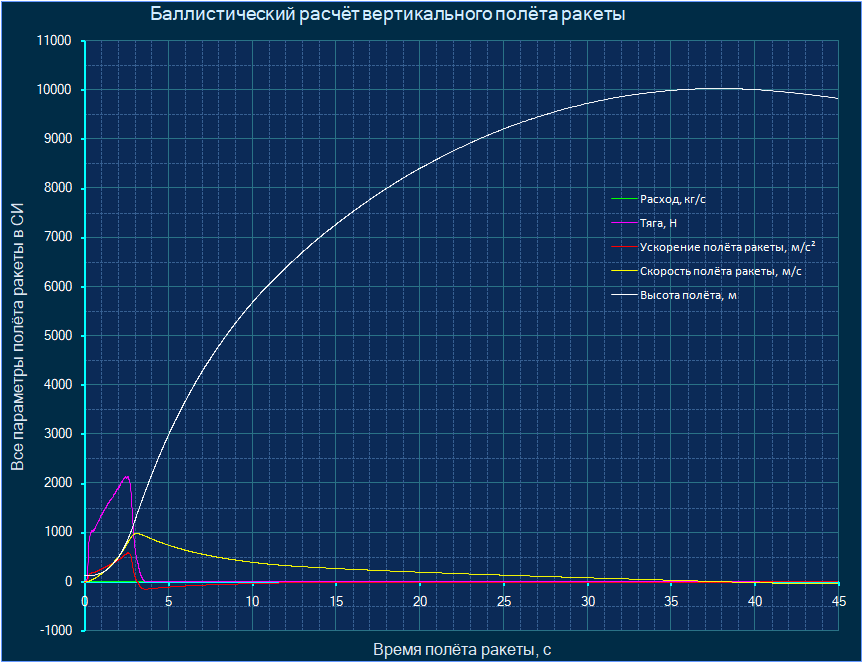
Я выкладывал расчёт:
вроде бы всё очевидно...
Mihail66> Масса топлива примерно 1,56кг?
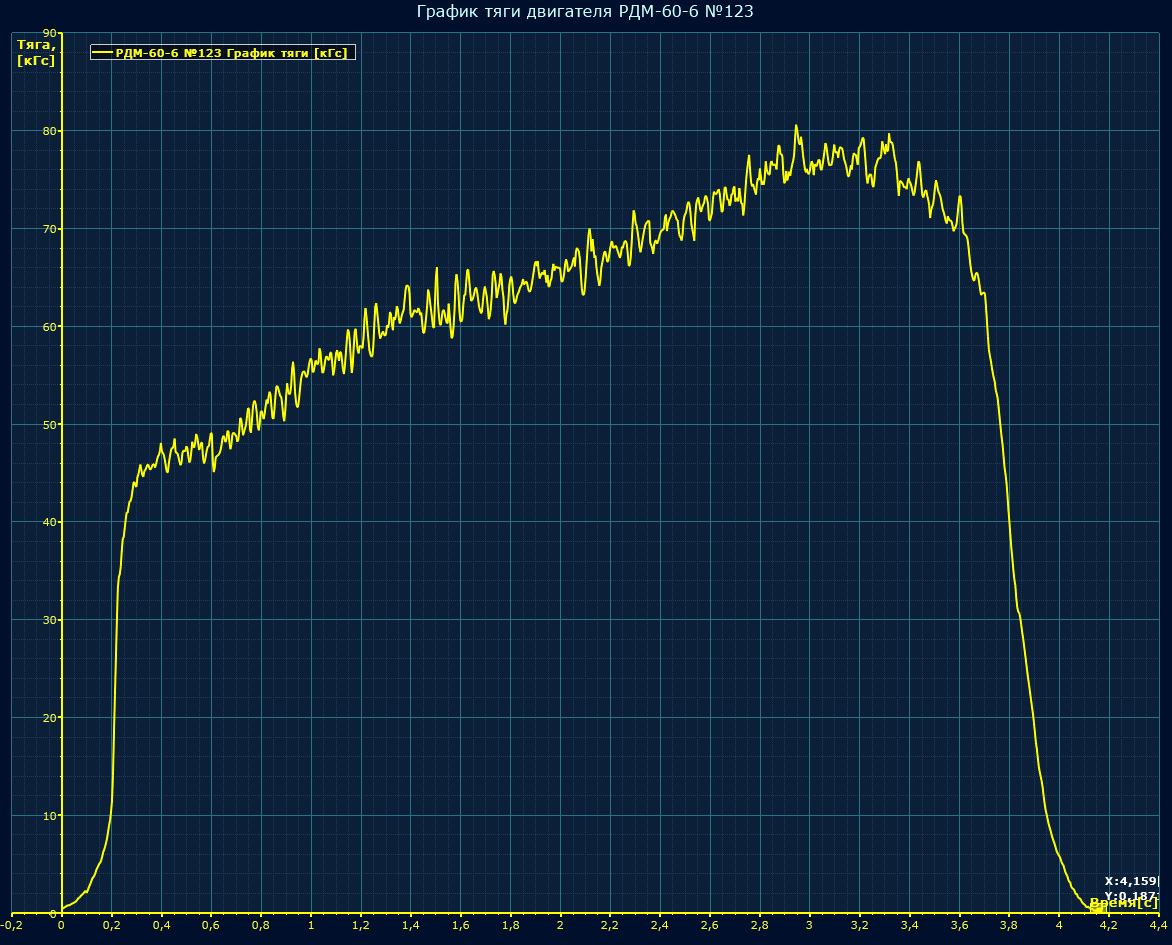
Это вот этот двигатель:
РДМ-60-6 №123 (НН-Сорбит-S-Fe2O3 64,35-32-3-0,65)
https://vk.com/wall-138792566_391 Масса двигателя до испытания – 1,897кг; Масса двигателя после испытания – 0,256кг; Масса воспламенителя – 0,002кг; Масса отброшенная – 1,641кг; Коэффициент массового совершенства 0,156; Диаметр критического сечения до испытания – 7,3мм; Диаметр критического сечения после испытания – 11,7мм; Расчётная прочность корпуса – 180атм; Суммарный импульс – 2284Нс; Удельный импульс – 141,9с; Потери удельного импульса – 11,2%; Материал корпуса – углеродный ровинг 800текс на эпоксидной смоле (ЭД-20 + Этал-45); Материал сопла – шамотная глина (обжиг до 1200°С)
Масса двигателя до испытания – 1,897кг;
Масса двигателя после испытания – 0,256кг;
Масса воспламенителя – 0,002кг;
Масса отброшенная – 1,641кг;
Коэффициент массового совершенства 0,156;
Диаметр критического сечения до испытания – 7,3мм;
Диаметр критического сечения после испытания – 11,7мм;
Расчётная прочность корпуса – 180атм;
Суммарный импульс – 2284Нс;
Удельный импульс – 141,9с;
Потери удельного импульса – 11,2%;
Материал корпуса – углеродный ровинг 800текс на эпоксидной смоле (ЭД-20 + Этал-45);
Материал сопла – шамотная глина (обжиг до 1200°С)
В 3D моделе я не учитывал потерю массы на ТЗП и прочие компоненты.
Он там уже есть и в двух местах, один фиксированный, другой подстроечный.
Mihail66> Или собираешься в легком варианте пустить, чтобы в полной мере скорость прочувствовать?
Я выкладывал расчёт:
вроде бы всё очевидно...
Mihail66> Масса топлива примерно 1,56кг?
Это вот этот двигатель:
РДМ-60-6 №123 (НН-Сорбит-S-Fe2O3 64,35-32-3-0,65)
https://vk.com/wall-138792566_391 Масса двигателя до испытания – 1,897кг; Масса двигателя после испытания – 0,256кг; Масса воспламенителя – 0,002кг; Масса отброшенная – 1,641кг; Коэффициент массового совершенства 0,156; Диаметр критического сечения до испытания – 7,3мм; Диаметр критического сечения после испытания – 11,7мм; Расчётная прочность корпуса – 180атм; Суммарный импульс – 2284Нс; Удельный импульс – 141,9с; Потери удельного импульса – 11,2%; Материал корпуса – углеродный ровинг 800текс на эпоксидной смоле (ЭД-20 + Этал-45); Материал сопла – шамотная глина (обжиг до 1200°С)
Масса двигателя до испытания – 1,897кг;
Масса двигателя после испытания – 0,256кг;
Масса воспламенителя – 0,002кг;
Масса отброшенная – 1,641кг;
Коэффициент массового совершенства 0,156;
Диаметр критического сечения до испытания – 7,3мм;
Диаметр критического сечения после испытания – 11,7мм;
Расчётная прочность корпуса – 180атм;
Суммарный импульс – 2284Нс;
Удельный импульс – 141,9с;
Потери удельного импульса – 11,2%;
Материал корпуса – углеродный ровинг 800текс на эпоксидной смоле (ЭД-20 + Этал-45);
Материал сопла – шамотная глина (обжиг до 1200°С)
В 3D моделе я не учитывал потерю массы на ТЗП и прочие компоненты.
SashaMaks> Я выкладывал расчёт:
Понял, спасибо.
Буду иметь представление, что у тебя полетит.
А корпус наверно будет на 3D-принтаке напечатан. Снаружи будешь углепластиком укреплять?
Понял, спасибо.
Буду иметь представление, что у тебя полетит.
А корпус наверно будет на 3D-принтаке напечатан. Снаружи будешь углепластиком укреплять?
Это сообщение редактировалось 07.09.2021 в 12:35
Mihail66> А корпус наверно будет на 3D-принтаке напечатан.
Он уже напечатан.
Mihail66> Снаружи будешь углепластиком укреплять?
Нет, стеклопластиком.
Он уже напечатан.
Mihail66> Снаружи будешь углепластиком укреплять?
Нет, стеклопластиком.
SashaMaks> Нет, стеклопластиком.
Оба-на!
А почему так?
Оба-на!
А почему так?
Mihail66> А почему так?
Чтобы антенны работали.
Чтобы антенны работали.
SashaMaks> Чтобы антенны работали.
Понятно.
GPS планируется по GPRS принимать?
Понятно.
GPS планируется по GPRS принимать?
Mihail66> GPS планируется по GPRS принимать?
По GSM.
По GSM.
SashaMaks> По GSM.
Это я понял.
Вопрос касается использования сервиса GPS-мониторинга.
Учти, что редко где (когда) можно принять/передать GSM-сигнал с высоты более 3км. Обычно уже на 1800-2000 метрах связь обрывается.
Это я понял.
Вопрос касается использования сервиса GPS-мониторинга.
Учти, что редко где (когда) можно принять/передать GSM-сигнал с высоты более 3км. Обычно уже на 1800-2000 метрах связь обрывается.
Это сообщение редактировалось 07.09.2021 в 17:29

Tayfur
втянувшийся
SashaMaks>> По GSM.
Mihail66> Это я понял.
Mihail66> Вопрос касается использования сервиса GPS-мониторинга.
Mihail66> Учти, что редко где (когда) можно принять/передать GSM-сигнал с высоты более 3км. Обычно уже на 1800-2000 метрах связь обрывается.
Наверно координаты можно отправить при падении высоты до необходимого. Потом GSM блок можно опрашивать на наличие связи. И на сколько понимаю GSM блок сам должен отправить накопленные SMS при появлении связи.
Mihail66> Это я понял.
Mihail66> Вопрос касается использования сервиса GPS-мониторинга.
Mihail66> Учти, что редко где (когда) можно принять/передать GSM-сигнал с высоты более 3км. Обычно уже на 1800-2000 метрах связь обрывается.
Наверно координаты можно отправить при падении высоты до необходимого. Потом GSM блок можно опрашивать на наличие связи. И на сколько понимаю GSM блок сам должен отправить накопленные SMS при появлении связи.
Tayfur> Наверно ....
Переходим вот сюда -

Переходим вот сюда -
GPS маяки, радиомаяки и другие системы поиска ракет. [Mihail66#08.09.21 10:27]
… Высотные ракеты SashaMaks II [Tayfur#08.09.21 10:02] … Наверно координаты можно отправить при падении высоты до необходимого. Потом GSM блок можно опрашивать на наличие связи. И на сколько понимаю GSM блок сам должен отправить накопленные SMS при появлении связи. // Ракетомодельный Оно примерно так и происходит. Когда ракета опустилась в зону покрытия GSM, но начинают приходить СМС-ки с локацией. Но когда ракета опустится на землю, то связь как правило снова пропадает. Реально…// Ракетомодельный
Реклама Google — средство выживания форумов :)
Mihail66>> Учти, что редко где (когда) можно принять/передать GSM-сигнал с высоты более 3км. Обычно уже на 1800-2000 метрах связь обрывается.
Tayfur> Наверно координаты можно отправить при падении высоты до необходимого. Потом GSM блок можно опрашивать на наличие связи. И на сколько понимаю GSM блок сам должен отправить накопленные SMS при появлении связи.
Не обращай внимания, Михаил пытается в очередной раз показать, что у меня всё плохо, и я ничего не знаю и ни в чём не разбираюсь. И что ракет у меня нет...
На самом деле, всё прекрасно работает по SMS через GSM и я уже дважды успешно это применял в своих ракетах:
(Запуски ракет и испытания [SashaMaks#29.04.15 20:32])
(Запуски ракет и испытания [SashaMaks#05.05.15 20:57])
И вообще:
(Ракетфест [SashaMaks#03.05.14 21:49])
(Топлива на нитрате натрия и двигатели на них. [SashaMaks#02.12.14 22:05])
(Топлива на нитрате натрия и двигатели на них. [SashaMaks#02.12.14 22:04])
(Электронное оборудование ракет - БРЭО,часть XIV [SashaMaks#23.10.16 14:33])
Первое применение:
(GPS маяки, радиомаяки и другие системы поиска ракет. [SashaMaks#10.02.13 23:29])
При этом ещё год до этого я так планировал делать.
Что касается передачи данных во время полёта, то тут я наткнулся на проблему помехозащищенности бортовой электроники от радиоизлучения GSM антенны. Так при передачи пакета SMS, наводка на плате видеокамеры останавливает видеозапись! Шумы по аналоговому сигналу с моего акселерометра составляют где-то (25...30)% всей шкалы! Даже на миниатюрном BMP280 были шумы! Экраны особо не помогли да и не предполагалось для них места уже, поэтому я решил вообще не использовать передачу данных по GPRS СМС-ками на телефон во время полёта. Критичный режим работы - это восходящая траектория, пока ракета летит до апогея, лучше вообще не трогать трекер и GSM передачу, а вот потом уже можно. Но и при тех скоростях и высотах полёта у меня есть большие сомнения, что вообще есть ли какой смысл в GPS данных. Они могут быть не точны и даже блокироваться ограничениями самих GPS приёмников. А после приземления всё работает уже, как и положено - на поиск ракеты с земли. Так и делал в обоих запусках. Ракета приземлилась, отправил СМС запрос, получил координаты, пришёл, нашёл, забрал, ушёл. Всё.
Tayfur> Наверно координаты можно отправить при падении высоты до необходимого. Потом GSM блок можно опрашивать на наличие связи. И на сколько понимаю GSM блок сам должен отправить накопленные SMS при появлении связи.
Не обращай внимания, Михаил пытается в очередной раз показать, что у меня всё плохо, и я ничего не знаю и ни в чём не разбираюсь. И что ракет у меня нет...
На самом деле, всё прекрасно работает по SMS через GSM и я уже дважды успешно это применял в своих ракетах:
(Запуски ракет и испытания [SashaMaks#29.04.15 20:32])
(Запуски ракет и испытания [SashaMaks#05.05.15 20:57])
И вообще:
(Ракетфест [SashaMaks#03.05.14 21:49])
(Топлива на нитрате натрия и двигатели на них. [SashaMaks#02.12.14 22:05])
(Топлива на нитрате натрия и двигатели на них. [SashaMaks#02.12.14 22:04])

(Электронное оборудование ракет - БРЭО,часть XIV [SashaMaks#23.10.16 14:33])

Первое применение:
(GPS маяки, радиомаяки и другие системы поиска ракет. [SashaMaks#10.02.13 23:29])
При этом ещё год до этого я так планировал делать.
Что касается передачи данных во время полёта, то тут я наткнулся на проблему помехозащищенности бортовой электроники от радиоизлучения GSM антенны. Так при передачи пакета SMS, наводка на плате видеокамеры останавливает видеозапись! Шумы по аналоговому сигналу с моего акселерометра составляют где-то (25...30)% всей шкалы! Даже на миниатюрном BMP280 были шумы! Экраны особо не помогли да и не предполагалось для них места уже, поэтому я решил вообще не использовать передачу данных по GPRS СМС-ками на телефон во время полёта. Критичный режим работы - это восходящая траектория, пока ракета летит до апогея, лучше вообще не трогать трекер и GSM передачу, а вот потом уже можно. Но и при тех скоростях и высотах полёта у меня есть большие сомнения, что вообще есть ли какой смысл в GPS данных. Они могут быть не точны и даже блокироваться ограничениями самих GPS приёмников. А после приземления всё работает уже, как и положено - на поиск ракеты с земли. Так и делал в обоих запусках. Ракета приземлилась, отправил СМС запрос, получил координаты, пришёл, нашёл, забрал, ушёл. Всё.
Copyright © Balancer 1997..2024
Создано 14.01.2021
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.01.2021
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}