-
/050invOA.png)
Бортовое радиоэлектронное оборудование ракет IX
Теги:
 termostat
termostat

Это сообщение редактировалось 23.09.2005 в 14:29
 инфо
инфо инструменты
инструменты Non-conformist
Non-conformist

Сообщение удалено автором
Skype: a_schabanow
Очередной апгрейд стартового комплекса небольших моделей ракет.
Приведенная ниже схема представляет собой новую концепцию питания бортового электронного блока системы спасения небольших моделей ракет. Идея заключается в отказе от использования химических источников тока и коммутируемых контактов на борту ракеты. Цель - не повышая финансовых затрат, максимально упростить, сократить и обезопасить предстартовые манипуляции со снаряженной ракетой, а также повысить надежность и улучшить массогабаритные показатели бортовой электроники.
Хотя схема и слегка проработана, она пока остается лишь эскизом, поскольку для назначения номиналов деталей и определения характеристик необходима серия экспериментов. Самое "узкое место" - значительный ток потребления схемы, в данном случае - микросхемы таймера (около 3 мА). По моим прикидкам, с конденсатором бортового питания С1.1 емкостью 2200 мкФ, заряженным до 35 В, данная схема будет способна отрабатывать задержки до 15 .. 20 сек. Однако, небольшая масса и цена современных конденсаторов указанного номинала позволяет соединять их параллельно в батарею до трех-четырех штук. Массогабаритные показатели такого бортового источника питания микросхемы таймера и воспламенителя вышибного заряда (три-четыре конденсатора 16 мм х 27 мм х 7,5 г) при этом будут существенно хуже, чем у литиевого элемента, оставаясь, однако, вполне сопоставимы с парой пальчиковых элементов.
По мнению автора, по сравнению с пальчиковыми и литиевыми элементами, конденсаторное питание бортовой электроники существенно выигрывает в удобстве и безопасности предстартовой подготовки. Повышается механическая стойкость летного оборудования: у конструктора появляется возможность выполнить электронный блок в герметичном, необслуживаемом варианте, поместив собранную из SMD-компонентов схему в подходящую по размерам легкую форму и залив ее вместе с конденсаторами питания монтажной пеной*. Повышается также надежность бортового источника питания в условиях низких температур, т.к. конденсаторы в этом смысле имеют значительное преимущество перед химическими источниками тока. И наконец, предлагаемая система рассчитана на использование надежных, дешевых и простых в изготовлении бортовых электровоспламенителей на основе токопроводного лака.
Возможные пути усовершенствования - в существенном снижении потребляемого схемой тока путем замены микросхемы таймера микроконтроллером, например семейства ATiny (500 мкА против 3 мА). Весьма заманчива также замена конденсатора питания С1 одним-двумя ионисторами емкостью 0,47 Ф х 5 В. К сожалению, и то, и другое, увеличивая время работы бортовой электроники как минимум до пяти минут, ведет к заметному удорожанию системы.
***
Оисание работы
Модель ракеты (детали 1.х) связана со стартовым пультом (детали 2.х) четырехжильным телефонным кабелем. Для подготовки модели к запуску достаточно вставить пятиконтактную фишку кабеля в разъем на корме ракеты. Четырехконтактная колодка, которой оканчивается второй конец пускового кабеля, перед пуском вставляется в разъем стартового пульта. После включения питания пульта (эта кнопка на схеме не показана), если все в порядке, должен загореться светодиод "ГОТОВ", после чего можно нажимать кнопку "ПУСК".
Описание схемы
С1.1 - конденсатор питания бортового таймера
C1.4 - запальный конденсатор
VD1.2 - стабилитрон, предотвращает разрядку С1.4 на С1.1
VD1.3 - диод, предотвращает разрядку С1.1 на С1.4
VD2.1 - диод, предотвращает разрядку С1.4 на R1.5 в момент нажатия кнопки S2.1 "ПУСК"
R1.2 - предохраняет VT1.1 от перегрузки по току в момент разряда С1.4 на R1.4
X1.2_X1.3 - перемычка, размыкается при сходе ракеты (запуск таймера)
Приведенная ниже схема представляет собой новую концепцию питания бортового электронного блока системы спасения небольших моделей ракет. Идея заключается в отказе от использования химических источников тока и коммутируемых контактов на борту ракеты. Цель - не повышая финансовых затрат, максимально упростить, сократить и обезопасить предстартовые манипуляции со снаряженной ракетой, а также повысить надежность и улучшить массогабаритные показатели бортовой электроники.
Хотя схема и слегка проработана, она пока остается лишь эскизом, поскольку для назначения номиналов деталей и определения характеристик необходима серия экспериментов. Самое "узкое место" - значительный ток потребления схемы, в данном случае - микросхемы таймера (около 3 мА). По моим прикидкам, с конденсатором бортового питания С1.1 емкостью 2200 мкФ, заряженным до 35 В, данная схема будет способна отрабатывать задержки до 15 .. 20 сек. Однако, небольшая масса и цена современных конденсаторов указанного номинала позволяет соединять их параллельно в батарею до трех-четырех штук. Массогабаритные показатели такого бортового источника питания микросхемы таймера и воспламенителя вышибного заряда (три-четыре конденсатора 16 мм х 27 мм х 7,5 г) при этом будут существенно хуже, чем у литиевого элемента, оставаясь, однако, вполне сопоставимы с парой пальчиковых элементов.
По мнению автора, по сравнению с пальчиковыми и литиевыми элементами, конденсаторное питание бортовой электроники существенно выигрывает в удобстве и безопасности предстартовой подготовки. Повышается механическая стойкость летного оборудования: у конструктора появляется возможность выполнить электронный блок в герметичном, необслуживаемом варианте, поместив собранную из SMD-компонентов схему в подходящую по размерам легкую форму и залив ее вместе с конденсаторами питания монтажной пеной*. Повышается также надежность бортового источника питания в условиях низких температур, т.к. конденсаторы в этом смысле имеют значительное преимущество перед химическими источниками тока. И наконец, предлагаемая система рассчитана на использование надежных, дешевых и простых в изготовлении бортовых электровоспламенителей на основе токопроводного лака.
Возможные пути усовершенствования - в существенном снижении потребляемого схемой тока путем замены микросхемы таймера микроконтроллером, например семейства ATiny (500 мкА против 3 мА). Весьма заманчива также замена конденсатора питания С1 одним-двумя ионисторами емкостью 0,47 Ф х 5 В. К сожалению, и то, и другое, увеличивая время работы бортовой электроники как минимум до пяти минут, ведет к заметному удорожанию системы.
***
Оисание работы
Модель ракеты (детали 1.х) связана со стартовым пультом (детали 2.х) четырехжильным телефонным кабелем. Для подготовки модели к запуску достаточно вставить пятиконтактную фишку кабеля в разъем на корме ракеты. Четырехконтактная колодка, которой оканчивается второй конец пускового кабеля, перед пуском вставляется в разъем стартового пульта. После включения питания пульта (эта кнопка на схеме не показана), если все в порядке, должен загореться светодиод "ГОТОВ", после чего можно нажимать кнопку "ПУСК".
Описание схемы
С1.1 - конденсатор питания бортового таймера
C1.4 - запальный конденсатор
VD1.2 - стабилитрон, предотвращает разрядку С1.4 на С1.1
VD1.3 - диод, предотвращает разрядку С1.1 на С1.4
VD2.1 - диод, предотвращает разрядку С1.4 на R1.5 в момент нажатия кнопки S2.1 "ПУСК"
R1.2 - предохраняет VT1.1 от перегрузки по току в момент разряда С1.4 на R1.4
X1.2_X1.3 - перемычка, размыкается при сходе ракеты (запуск таймера)
- По информации, полученной из весьма информированного источника, в восьмидесятых-девяностых годах схожая технология герметизации, теплоизоляции и механического демпфирования электронных блоков широко применялась в ракетно-космической промышленности Советского Союза. Естественно, проверка возможности замены специального газонаполненного пористого герметика строительной монтажной пеной потребует экспериментов и проверки временем - на предмет ее электроизоляционных свойств и химической инертности по отношению к электронным компонентам.
Прикреплённые файлы:

Skype: a_schabanow
Это сообщение редактировалось 23.09.2005 в 21:14
Yuran>
Господа, кто поделиться опытом (правильной!) пайки микросхем в TQFP корпусах, ....
я ATmega64 паял обчным паяльником на 40 Вт но жало заточено у меня под smd -
пирамидой в 30 град между граянями и верхушка примерно 1х0.6 мм
припоем-проволокой диам 1 мм с флюсом внутри, при пайке паяльникотключал от сети.
Предварительно площадки лудил вручную.
Затем ватной палочкой смазал активным флюсом пложадки и ножки МК.
Вначале припаял блокировочные кондеры на 0.1
затем вывод GND - проверил позиционирование и потом припаял все выводы граунды
и питание
затем остальные ноги не друг за другом а в разброс.
Прикреплённые файлы:

Для тех кто собирается использовать ОУ
для нормирования сигналов с датчиков БРЭО
в своих схемах сделал диаграмму и
калькулятор для расчет инвертирующего
усилителя.
Также описал методику расчета
фильтра перед АЦП и защиту входов.
- Краткий Курс - Самоучитель - Программирование микроконтроллеров AVR - быстрый старт с нуля - avr123.nm.ruОбработка сигнала датчика перед подачей на АЦП - задача 9 часть 2[/URL]
- http://avr123.nm.ru/calc_inv_opamp.xlsКалькулятор инвертирующего усилителя на ОУ[/URL]
- скриншот калькулятора[/URL]
скриншот калькулятора[/URL]
Диаграмма ОУ по инвертирующей схеме:
для нормирования сигналов с датчиков БРЭО
в своих схемах сделал диаграмму и
калькулятор для расчет инвертирующего
усилителя.
Также описал методику расчета
фильтра перед АЦП и защиту входов.
- Краткий Курс - Самоучитель - Программирование микроконтроллеров AVR - быстрый старт с нуля - avr123.nm.ruОбработка сигнала датчика перед подачей на АЦП - задача 9 часть 2[/URL]
- http://avr123.nm.ru/calc_inv_opamp.xlsКалькулятор инвертирующего усилителя на ОУ[/URL]
-
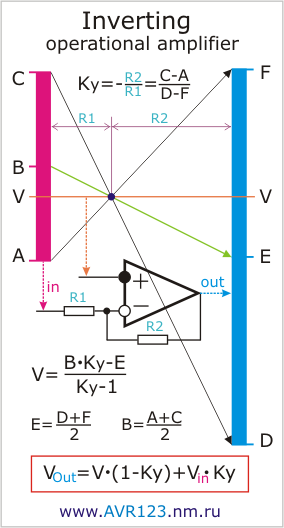
Диаграмма ОУ по инвертирующей схеме:


Тут читал книжку по немецким реактвным самолетам второй мировой, и возникла идея, а что если использовать в качестве акселерометра двигатель с крыльчаткой, работающий в режиме генератора (как в самолете Me 163 В - только у них он работал для питания радиостанции и прочей электроники)?
Идея такова: крыльчатка вращается набегающим потоком воздуха - вырабатывается ток, при замедлении ракеты падает напряжение, вот это падение наверное можно использовать как управляющий сигнал для выброса парашюта или включения таймера.
А может быть связку генератор-конденсатор можно использовать и для питания БРЭО, хотя маловероятно...
Идея такова: крыльчатка вращается набегающим потоком воздуха - вырабатывается ток, при замедлении ракеты падает напряжение, вот это падение наверное можно использовать как управляющий сигнал для выброса парашюта или включения таймера.
А может быть связку генератор-конденсатор можно использовать и для питания БРЭО, хотя маловероятно...
«Внутре! — прошелестел старичок. — Внутре смотрите, где у нее анализатор и думатель…» А. и Б. Стругацкие
> ... хотя маловероятно...
Ну почему же? Я вот уже несколько лет пользуюсь запальной машинкой-генератором, сделанной из реверсивного двигателя для самописцев. Двигатель асинхронный, поэтому пришлось короткозамкнутый ротор с вала спрессовать, и вместо него закрепить пару постоянных магнитов - все прекрасно работает.
В случае же коллекторного двигателя, с постоянным магнитом, никаких переделок вообще не потребуется. Готовый вариант - трехвольтовый двигатель от плейера. Легкий, компактный... Только чтобы не превышать допустимое напряжение зарядки конденсатора, на выходе генератора надо поставить стабилитрон с резистором, примерно как на схеме выше.
Но: крыльчатка - это рост лобового сопротивления. СтОит ли затею затевать? И притом, какую нужно крыльчатку на сверхзвуковой набегающий поток?
***
Микросхемы часов-будильников - питание 1,5 В, ток потребления - микроамперы. Готовый суперэкономичный таймер. Такие часы стОят порядка одного у. е. Вот только как этот чип к нашей специфике приспособить? Наверное, проще МК.
Ну почему же? Я вот уже несколько лет пользуюсь запальной машинкой-генератором, сделанной из реверсивного двигателя для самописцев. Двигатель асинхронный, поэтому пришлось короткозамкнутый ротор с вала спрессовать, и вместо него закрепить пару постоянных магнитов - все прекрасно работает.
В случае же коллекторного двигателя, с постоянным магнитом, никаких переделок вообще не потребуется. Готовый вариант - трехвольтовый двигатель от плейера. Легкий, компактный... Только чтобы не превышать допустимое напряжение зарядки конденсатора, на выходе генератора надо поставить стабилитрон с резистором, примерно как на схеме выше.
Но: крыльчатка - это рост лобового сопротивления. СтОит ли затею затевать? И притом, какую нужно крыльчатку на сверхзвуковой набегающий поток?
***
Микросхемы часов-будильников - питание 1,5 В, ток потребления - микроамперы. Готовый суперэкономичный таймер. Такие часы стОят порядка одного у. е. Вот только как этот чип к нашей специфике приспособить? Наверное, проще МК.
Skype: a_schabanow
Кому интересен проверенный симулятор электронных схемм - MicroCap
Нашел я где скачать версию 7.08 вроде полную, кто заинтересован и имеет быстрый интернет может проверить, так ли все хорошо как обещают.
SPECTRUM MICROCAP V7.08
http://www.sibguti.kht.ru/progi/MC7.rar
(9,4 Mб - это больше чем демо8 с сайта производителя - обнадеживает!)
Руссификатор: Spectrum Microcap V7.08 SibGUTI Edition
http://www.sibguti.kht.ru/progi/mc7Rus.rar (1 Mб)
Если же это окажется Дема то есть вот отдельно архивом: лекарство, исполняемый файл и утилита создания компонентов - http://zabryus.narod.ru/zip/mc7.zip (1,55 Mb)
Есть руководство пользователя -
А может кто знает где взять точно полную версию ?
Нашел я где скачать версию 7.08 вроде полную, кто заинтересован и имеет быстрый интернет может проверить, так ли все хорошо как обещают.
SPECTRUM MICROCAP V7.08
http://www.sibguti.kht.ru/progi/MC7.rar
(9,4 Mб - это больше чем демо8 с сайта производителя - обнадеживает!)
Руссификатор: Spectrum Microcap V7.08 SibGUTI Edition
http://www.sibguti.kht.ru/progi/mc7Rus.rar (1 Mб)
Если же это окажется Дема то есть вот отдельно архивом: лекарство, исполняемый файл и утилита создания компонентов - http://zabryus.narod.ru/zip/mc7.zip (1,55 Mb)
Есть руководство пользователя -
А может кто знает где взять точно полную версию ?
 ikono
ikono

ikono
втянувшийся
Фото моего видеопередатчика 23 см диапазона, который я собрал в 1999м... Налет у него более 2 часов на RC самолете, он по прежнему работает хорошо.
Прикреплённые файлы:
Мой адрес не дом и не улица,
Мой адрес Советский Союз....
Мой адрес Советский Союз....

ikono> Фото моего видеопередатчика 23 см диапазона, который я собрал в 1999м... Налет у него более 2 часов на RC самолете, он по прежнему работает хорошо. [»]
Отлично! Можешь выложить схему и подробное описание. Какая мощность, что в качестве приёмника, какая дальность. Насколько сложна настройка.
Отлично! Можешь выложить схему и подробное описание. Какая мощность, что в качестве приёмника, какая дальность. Насколько сложна настройка.
Наконец то сегодня сделали платы под новое БРЭО. Куплю паяльничек на 18Вт, и резюков чуток и паять, у старого паяльника жало совсем плохое стало придётся его на "воспламенители" разобрать B) . Если интересно могу выложить фотки =)
Плата под ВЧ усилитель разводилась по курсу termostata о согласовании импендансов, посмотрим как теория проявит себя на практике. Всё таки можно было покомпактней развести, но
думаю, в общем нормально, главное чтобы нигде не облажался с разводкой =)
Плата под ВЧ усилитель разводилась по курсу termostata о согласовании импендансов, посмотрим как теория проявит себя на практике. Всё таки можно было покомпактней развести, но
думаю, в общем нормально, главное чтобы нигде не облажался с разводкой =)
Serj78
новичок
Прочитал весь форум, не полнился, здорово!
возникли некоторые вопросы...
2termostat: курс соглавования понравился, однако я не смог его сохнанить, а теперь, почему-то заканчивается на 2-м примере и красивой картинки со змейкой нету, не говоря уж об анонсированных примерах 6 и7.
Где я дурак, подскажите...")
везникли некоторые предложения. , исходя из опыта работы- сейчас делаю автопилот для р/у самолета...
датчик апогея (насколько я понял, это верхняя точка траектории ракеты)
проще всего сделать на 1-мх аксерометрах- один ось вниз, сначала он сечет , когда ускорение станет менее 1.1g- работа двигателя прекратилась- идет пассивный участок траектории, потом, когда его показания станут меньше , 0.86 п- это наклон более 30 градусов вбок- вот вам и апогей. может, я и не прав, поругайте...
По поводу радиомаяков- до высоты 50м можно использовать и 2.4Ггц, и 144Мгц, и 433. , на 433мгц на высоте 50м 200мвт р/ст "вектор-флип" (200мвт, 3.6 вольта питание, штатная 8см антенна), работают на 8км, поверял. На это же расстояние работает и 1-ваттный китайский тв-передатчик на частоте 1200Мгц .Антенны везде штыревые, в 85, по индикатору поля настроенные.
Для поиска на земле , можно воспользоваться опытом свободников- у них самолеты за 3-5км улетают. Маяки у них на 144мгц, прием на обычную радиостанцию или сканер. На земле дальность около 2-х км, с направленной антенной диполь или 2-х элементный волновой канал- около 3.5км. В воздухе дальность до 20км! причем мощность НИКАКАЯ- от 3-х часовых батареек эта штука пашет 1.5 суток! Потребляемый ток в импульсе около 7-10ма.
Передатчик работает короткими импульсами несущей, 1-00- 150 мс, каждые 2-3с. Cтоит там 4066 (561кт3 по нашему) как генератор-модулятор , и собственно предатчик - 2 транзистора sot23- один генератор на кварце по 5-й гармонике, второй- усилитель. антенна 30-35см тонкий тросик.
Сам такой маяк чинил
Делают их в Голландии и Австралии, вроде и на Украине сейчас начали...
Для отдельной радиотелеметрии в воздухе , думаю будет достаточно 100-200мвт. на те же 8ум, при полосе 50-100кгц. Любимый DP2003+усилок пока не знаю какой.
возникли некоторые вопросы...
2termostat: курс соглавования понравился, однако я не смог его сохнанить, а теперь, почему-то заканчивается на 2-м примере и красивой картинки со змейкой нету, не говоря уж об анонсированных примерах 6 и7.
Где я дурак, подскажите...
везникли некоторые предложения. , исходя из опыта работы- сейчас делаю автопилот для р/у самолета...
датчик апогея (насколько я понял, это верхняя точка траектории ракеты)
проще всего сделать на 1-мх аксерометрах- один ось вниз, сначала он сечет , когда ускорение станет менее 1.1g- работа двигателя прекратилась- идет пассивный участок траектории, потом, когда его показания станут меньше , 0.86 п- это наклон более 30 градусов вбок- вот вам и апогей. может, я и не прав, поругайте...
По поводу радиомаяков- до высоты 50м можно использовать и 2.4Ггц, и 144Мгц, и 433. , на 433мгц на высоте 50м 200мвт р/ст "вектор-флип" (200мвт, 3.6 вольта питание, штатная 8см антенна), работают на 8км, поверял. На это же расстояние работает и 1-ваттный китайский тв-передатчик на частоте 1200Мгц .Антенны везде штыревые, в 85, по индикатору поля настроенные.
Для поиска на земле , можно воспользоваться опытом свободников- у них самолеты за 3-5км улетают. Маяки у них на 144мгц, прием на обычную радиостанцию или сканер. На земле дальность около 2-х км, с направленной антенной диполь или 2-х элементный волновой канал- около 3.5км. В воздухе дальность до 20км! причем мощность НИКАКАЯ- от 3-х часовых батареек эта штука пашет 1.5 суток! Потребляемый ток в импульсе около 7-10ма.
Передатчик работает короткими импульсами несущей, 1-00- 150 мс, каждые 2-3с. Cтоит там 4066 (561кт3 по нашему) как генератор-модулятор , и собственно предатчик - 2 транзистора sot23- один генератор на кварце по 5-й гармонике, второй- усилитель. антенна 30-35см тонкий тросик.
Сам такой маяк чинил
Делают их в Голландии и Австралии, вроде и на Украине сейчас начали...
Для отдельной радиотелеметрии в воздухе , думаю будет достаточно 100-200мвт. на те же 8ум, при полосе 50-100кгц. Любимый DP2003+усилок пока не знаю какой.
ikono
втянувшийся
Serj78> проще всего сделать на 1-мх аксерометрах- один ось вниз, сначала он сечет , когда ускорение станет менее 1.1g- работа двигателя прекратилась- идет пассивный участок траектории, потом, когда его показания станут меньше , 0.86 п- это наклон более 30 градусов вбок- вот вам и апогей. может, я и не прав, поругайте...
Думаю, не все так просто. После остановки двигателя ускорение вверх ракеты должно стать отрицательное из-за сопротивления воздуха. В апогее должен быть ноль или около того (невесомость, и этот момент можно отметить!), потом ракета переворачивается, ускорение снова отрицательное из-за нарастающего сопротивления воздуха.
Serj78> На это же расстояние работает и 1-ваттный китайский тв-передатчик на частоте 1200Мгц.
1 Вт на входе или на выходе? Если на выходе, что у них там в выходном каскаде? Я люблю использовать BFG591, но больше 200-300 мВт с одного получать не удавалось.
Serj78> Передатчик работает короткими импульсами несущей, 1-00- 150 мс, каждые 2-3с. Cтоит там 4066 (561кт3 по нашему) как генератор-модулятор , и собственно предатчик - 2 транзистора sot23- один генератор на кварце по 5-й гармонике, второй- усилитель. антенна 30-35см тонкий тросик.
Serj78> Сам такой маяк чинил
У меня второй каскад - умножитель на 2. Кварц либо на 16 МГц на третьей с утроителем, либо как у меня - на 24 МГц на третьей гармонике с удвоителем. Частота ложится обычно чуть пониже 144, у меня 143,975. При поиске на земле достают отражения от предметов, особенно в ближней зоне, но найти можно.
Думаю, не все так просто. После остановки двигателя ускорение вверх ракеты должно стать отрицательное из-за сопротивления воздуха. В апогее должен быть ноль или около того (невесомость, и этот момент можно отметить!), потом ракета переворачивается, ускорение снова отрицательное из-за нарастающего сопротивления воздуха.
Serj78> На это же расстояние работает и 1-ваттный китайский тв-передатчик на частоте 1200Мгц.
1 Вт на входе или на выходе? Если на выходе, что у них там в выходном каскаде? Я люблю использовать BFG591, но больше 200-300 мВт с одного получать не удавалось.
Serj78> Передатчик работает короткими импульсами несущей, 1-00- 150 мс, каждые 2-3с. Cтоит там 4066 (561кт3 по нашему) как генератор-модулятор , и собственно предатчик - 2 транзистора sot23- один генератор на кварце по 5-й гармонике, второй- усилитель. антенна 30-35см тонкий тросик.
Serj78> Сам такой маяк чинил
У меня второй каскад - умножитель на 2. Кварц либо на 16 МГц на третьей с утроителем, либо как у меня - на 24 МГц на третьей гармонике с удвоителем. Частота ложится обычно чуть пониже 144, у меня 143,975. При поиске на земле достают отражения от предметов, особенно в ближней зоне, но найти можно.
Мой адрес не дом и не улица,
Мой адрес Советский Союз....
Мой адрес Советский Союз....
ikono
втянувшийся
Serj78>> В воздухе дальность до 20км!
Многое зависит от высоты. Когда пару лет назад австрийцы запустили 70 мВт на воздушном шаре, я принимал телеметрию на 144 МГц с расстояния около 500 км, но только при высоте шара больше 14 км. Это совершенно обычное дело. 200 мВт на 23 см хватает с хорошими антеннами до 100-150 км при прямой радио видимости.
Многое зависит от высоты. Когда пару лет назад австрийцы запустили 70 мВт на воздушном шаре, я принимал телеметрию на 144 МГц с расстояния около 500 км, но только при высоте шара больше 14 км. Это совершенно обычное дело. 200 мВт на 23 см хватает с хорошими антеннами до 100-150 км при прямой радио видимости.
Мой адрес не дом и не улица,
Мой адрес Советский Союз....
Мой адрес Советский Союз....
Serj78> 2termostat: курс соглавования понравился, однако я не смог его сохнанить, а теперь, почему-то заканчивается на 2-м примере и красивой картинки со змейкой нету, не говоря уж об анонсированных примерах 6 и7.
Serj78> Где я дурак, подскажите...
Извини. я его чуток корректирую, завтра, послезавтра должен быть весь он-лайн.
Serj78> В воздухе дальность до 20км! причем мощность НИКАКАЯ- от 3-х часовых батареек эта штука пашет 1.5 суток! Потребляемый ток в импульсе около 7-10ма.
Мир тебе, брат!
Схемку не нарисуешь?
Serj78> Прочитал весь форум, не полнился, здорово!
Силен, однако! Наверное, сильно быстро читал, все-таки. Я к тому, что ADXL-ки обсасывались там вдоль и поперек - где-то полгода-год назад.
Мир тебе, брат!
Схемку не нарисуешь?
Serj78> Прочитал весь форум, не полнился, здорово!
Силен, однако!
Наверное, сильно быстро читал, все-таки. Я к тому, что ADXL-ки обсасывались там вдоль и поперек - где-то полгода-год назад.
Skype: a_schabanow
Это сообщение редактировалось 27.09.2005 в 13:20
Serj78
новичок
каюсь- прочитал только 7и 8-ю части...
Тогда странно, что механические гироскопы прменяют, если акселерометры уже пробовали...
схемку маяка сфоткаю и выложу сегодня- завтра..
по поводу дальности - ключевой вопрос- какая полоса ? если 1Кгц, то и 10мвт на 10км хватит
в ТВ передатчике стоит BLT80, схема усилителя просто содрана китайцами практически один в один, из даташита, который выложу вечером - на работе его нету...
2termostat:
Не измеряли ли вы реально, какой диапазон перестройки частоты у DP1203? по разрядности регисров должно выходить не меньше 32 Мгц, то есть 915 + - 16Мгц,а в даташите указывают диапазон 902-928...
А в Элтехе в Питере все бухгалтера куда-то уехали, 2 недели за наличку ничего продавать не хотят :(:(
Тогда странно, что механические гироскопы прменяют, если акселерометры уже пробовали...
схемку маяка сфоткаю и выложу сегодня- завтра..
по поводу дальности - ключевой вопрос- какая полоса ? если 1Кгц, то и 10мвт на 10км хватит
в ТВ передатчике стоит BLT80, схема усилителя просто содрана китайцами практически один в один, из даташита, который выложу вечером
- на работе его нету...2termostat:
Не измеряли ли вы реально, какой диапазон перестройки частоты у DP1203? по разрядности регисров должно выходить не меньше 32 Мгц, то есть 915 + - 16Мгц,а в даташите указывают диапазон 902-928...
А в Элтехе в Питере все бухгалтера куда-то уехали, 2 недели за наличку ничего продавать не хотят :(:(

 a_centaurus
a_centaurus

Да ничего странного. Мы ведь Еxperimental Rocketry занимаемся. Вот и хотим попробовать разные штуки. А в случае сравнения гироскопного механико-электрического датчика апогея с акселерометрами ты видимо не всё понял. Ведь в этом случае не нужна электроника. А к акселерометру надо её ещё пристраивать. Тот же одноосевой акселерометр у меня работает просто в качестве инерционного ключа в паре с таймером. Если ты сделаешь простую, надёжную и лёгкую схему бортовой электроники (усилитель, логика, ЦПУ) ,это ещё не будет означать, что она хорошо впишется в общую систему бортовой автоматики с её пиротехническими устройствами или бортовыми приборами или устройствами. Всё делается в общем комплексе, увязывая как аэродинамику ракеты, так и мощность мотора и комплекс решаемых ракетой задач. Так что пока учись и не торопись делать революции. В этом деле как нигде полезен консерватизм.

a_centaurus> одноосевой акселерометр у меня работает просто в качестве инерционного ключа
Коллеги, давайте все вместе придумаем хороший перевод термину "g-switch".
Мне кажется, что акселерометром это устройство назвать никак нельзя, потому что "-метр" означает измерение, а это не измеритель, а бинарный переключатель. Поэтому во избежание путаницы нужно подходящее название.
Какие будут предложения?
"инерционный ключ" - очень хороший вариант.
Может есть уже устоявшийся "промышленный" термин?
Коллеги, давайте все вместе придумаем хороший перевод термину "g-switch".
Мне кажется, что акселерометром это устройство назвать никак нельзя, потому что "-метр" означает измерение, а это не измеритель, а бинарный переключатель. Поэтому во избежание путаницы нужно подходящее название.
Какие будут предложения?
"инерционный ключ" - очень хороший вариант.
Может есть уже устоявшийся "промышленный" термин?
Serj78
новичок
По поводу усилителя несколько ошибся- там последовательно BLT80, BLT81.
по поводу маяка- кварц там в конечном счете я поставил все-таки по 3-ей гармонике (нашел схему).
но работал там и по 5-й, только мощность была меньше.
по поводу маяка- кварц там в конечном счете я поставил все-таки по 3-ей гармонике (нашел схему).
но работал там и по 5-й, только мощность была меньше.

> ... если 1Кгц, то и 10мвт на 10км хватит ...
Да полосы-то мне лично никакой не надо - ты же говоришь о маяке, т.е. "пи-пи-пи", тональные посылки - полоса минимальная. Я уже полный баран в этих тонкостях, т.е. то, что не знал - давно забыл, как говорится.
Помню, что узость полосы излучения при работе телеграфом (наш случай, стало быть) есть первейший показатель качества передающей аппаратуры. Форма посылок специально делается не прямоугольной, а колоколообразной, с заваленными фронтом и спадом, чтобы сузить спектр гармоник и повысить КПД (мощность сфокусировать) - достигается это, насколько я помню, специальными фильтрами. А дальше - подавление несущей, еще дальше - SSB... Но это имхо слегка не то - нам как бы подешевше да попроще.
> ... акселерометры уже пробовали ...
И тут я опять-таки не эксперт, но могу дать справку - в прайсах мне встречались как акселерометры, так и твердотельные гироскопы - по веселым, правда, ценам, но тут уж всяк за себя решает. Просто я знаю, что всерьез этим заниматься никогда не буду, поэтому и не въезжаю сильно.
А что до картины изменения ускорения в процессе полета ракеты, то мозги мне в этом отношении вправили здесь же, на форуме. Попробую воспроизвести.
На активном участке полета на модель действуют два ускорения. Если летим вертикально вверх, то они направлены диаметрально противоположно: вниз направлено ускорение свободного падения, вверх - ускорение, сообщаемое ракете двигателем. Если пренебречь сопротивлением воздуха, то в момент окончания работы движка ускорение от него исчезает, и остается только ускорение свободного падения - оно не исчезнет даже ПОСЛЕ завершения полета, после удара о землю. Скорость же полета после остановки движка будет падать с этим самым, строго постоянным ускорением (~ 9,8 м/с за одну секунду), пройдет нулевое значение в точке апогея, и станет набирать отрицательные величины вплоть до удара о землю. Стало быть, в безвоздушном пространстве голый акселерометр никак не сможет определить точку апогея - нужен не акселерометр, а спидометр вертикальной скорости, т.е. сигнал с чипа нужно интегрировать (так это вроде называется) и смотреть, когда это проинтегрированное значение станет равным нулю.
Т.е. интегрируем сигнал с ADXL-ки мы все время, с самого начала - со старта, максимальную скорость получаем в момент окончания работы двигателя, а дальше сигнал меняет знак, и продолжая его интегрировать, мы начинаем вычитать из этой накопленной скорости - где до нуля досчитаем, там и апогей. Кстати сказать, аэродинамическое сопротивление эта система строго учитывает - измеряем-то ускорение конкретной ракеты, в конкретных условиях, бортовым датчиком.
Системка, как я понимаю, сложновата - если в цифре все считать, то нужен микроконтроллер. Да и датчик сам по себе недешев. Датчик магнитного поля земли намного дешевле и проще, хотя тоже имеет свои нюансы... Весьма, надо сказать, неприятные...
Да полосы-то мне лично никакой не надо - ты же говоришь о маяке, т.е. "пи-пи-пи", тональные посылки - полоса минимальная. Я уже полный баран в этих тонкостях, т.е. то, что не знал - давно забыл, как говорится.
Помню, что узость полосы излучения при работе телеграфом (наш случай, стало быть) есть первейший показатель качества передающей аппаратуры. Форма посылок специально делается не прямоугольной, а колоколообразной, с заваленными фронтом и спадом, чтобы сузить спектр гармоник и повысить КПД (мощность сфокусировать) - достигается это, насколько я помню, специальными фильтрами. А дальше - подавление несущей, еще дальше - SSB... Но это имхо слегка не то - нам как бы подешевше да попроще.
> ... акселерометры уже пробовали ...
И тут я опять-таки не эксперт, но могу дать справку - в прайсах мне встречались как акселерометры, так и твердотельные гироскопы - по веселым, правда, ценам, но тут уж всяк за себя решает. Просто я знаю, что всерьез этим заниматься никогда не буду, поэтому и не въезжаю сильно.
А что до картины изменения ускорения в процессе полета ракеты, то мозги мне в этом отношении вправили здесь же, на форуме. Попробую воспроизвести.
На активном участке полета на модель действуют два ускорения. Если летим вертикально вверх, то они направлены диаметрально противоположно: вниз направлено ускорение свободного падения, вверх - ускорение, сообщаемое ракете двигателем. Если пренебречь сопротивлением воздуха, то в момент окончания работы движка ускорение от него исчезает, и остается только ускорение свободного падения - оно не исчезнет даже ПОСЛЕ завершения полета, после удара о землю. Скорость же полета после остановки движка будет падать с этим самым, строго постоянным ускорением (~ 9,8 м/с за одну секунду), пройдет нулевое значение в точке апогея, и станет набирать отрицательные величины вплоть до удара о землю. Стало быть, в безвоздушном пространстве голый акселерометр никак не сможет определить точку апогея - нужен не акселерометр, а спидометр вертикальной скорости, т.е. сигнал с чипа нужно интегрировать (так это вроде называется) и смотреть, когда это проинтегрированное значение станет равным нулю.
Т.е. интегрируем сигнал с ADXL-ки мы все время, с самого начала - со старта, максимальную скорость получаем в момент окончания работы двигателя, а дальше сигнал меняет знак, и продолжая его интегрировать, мы начинаем вычитать из этой накопленной скорости - где до нуля досчитаем, там и апогей. Кстати сказать, аэродинамическое сопротивление эта система строго учитывает - измеряем-то ускорение конкретной ракеты, в конкретных условиях, бортовым датчиком.
Системка, как я понимаю, сложновата - если в цифре все считать, то нужен микроконтроллер. Да и датчик сам по себе недешев. Датчик магнитного поля земли намного дешевле и проще, хотя тоже имеет свои нюансы... Весьма, надо сказать, неприятные...
Skype: a_schabanow
"инерционный ключ" - очень хороший вариант.
И в самом деле получилось удачно, в плане перевода, хотя и экспромтом. А то и впрямь g-switch писать без английского контекста плохо, а в русском стандарте что-то ничего не нашлось. А девайс и вправду ничего не меряет, а только реагирует на изменение ускорения. Совершенно справедливо заметил Serge77. Так что "инерциальный ключ", кто больше?
Non-conformist> Если пренебречь сопротивлением воздуха, то в момент окончания работы движка ускорение от него исчезает, и остается только ускорение свободного падения
Но акселерометр внутри ракеты будет показывать чистый ноль, т.е. при отсутствии сопротивления воздуха наступает невесомость от момента окончания работы двигателя до падения на землю. Это и есть свободное падение.
При наличии воздуха акселерометр показывает ускорение, получаемое ракетой за счёт силы торможения об воздух.
Сколько же раз это обсуждали............
Но акселерометр внутри ракеты будет показывать чистый ноль, т.е. при отсутствии сопротивления воздуха наступает невесомость от момента окончания работы двигателя до падения на землю. Это и есть свободное падение.
При наличии воздуха акселерометр показывает ускорение, получаемое ракетой за счёт силы торможения об воздух.
Сколько же раз это обсуждали............
Copyright © Balancer 1997..2018
Создано 23.09.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 23.09.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}