-
![[image]](https://www.balancer.ru/cache/forums/attaches/2015/08/128x128-crop/30-3933606-sashamaks.jpg)
Высотные ракеты SashaMaks
Мой проект высотных ракет.Теги:
 SashaMaks
SashaMaks

Давно думал над созданием подобной темы, но сейчас уже появилась необходимость собрать всю информацию о том, что я делаю в одном месте строго и структурировано. Это необходимо будет для представления потом в виде собственного проекта и концепции высотной ракеты, как начального этапа.
Тут будет всё, что так или иначе связано с тем, что я делаю в ракетах от химии топлив и конструкций до программ и электроники.
А также детальное описание всего проекта начиная ещё с 1996 года. Так как есть и исторический провал в информации, из-за которого многие мои действия кажутся тут непонятными. Раньше эту информацию я не афишировал по ряду причин, но теперь никаких препятствий больше нет.
Массогабаритный прогресс составляет 8000 раз за 19 лет! От ракет диаметром 3мм до 60мм. От массы топлива в 0,15г до 3,4кг.
Тут будет всё, что так или иначе связано с тем, что я делаю в ракетах от химии топлив и конструкций до программ и электроники.
А также детальное описание всего проекта начиная ещё с 1996 года. Так как есть и исторический провал в информации, из-за которого многие мои действия кажутся тут непонятными. Раньше эту информацию я не афишировал по ряду причин, но теперь никаких препятствий больше нет.
Массогабаритный прогресс составляет 8000 раз за 19 лет! От ракет диаметром 3мм до 60мм. От массы топлива в 0,15г до 3,4кг.
Прикреплённые файлы:


 инфо
инфо инструменты
инструменты
ventel> Саша,ты писал про фруктозу, Но работал ли ты с обычным сахаром.
С сахаром работал, аж 1998 года, как в порохах на НН и НК, так в карамели с 2001 года.
Самый первый состав моей карамели был:
Нитрат натрия - 60%;
Сорбит - 35%;
Сахар - 5%.
Сахар использовал тогда для загущения топлива. Только один сахар использовать очень сложно, почти невозможно. Он слишком высокую температуру плавления имеет.
ventel> У меня есть большое количество сокристаллизованного NN/NK в соотношении 80/20.
НК в больших двигателях потребуется в больших количествах. Например, сейчас один мой двигатель за одно испытание сжигает 2,15кг нитрата натрия. Если брать НК по цене в магазине в 200р/кг, то получается уже 430р., тогда как всё топливо на НН в этом двигателе стоит 350-400р. При том же давлении я получаю немного больший больший УИ и почти в 2 раза большую высоту полёта, благодаря занижению скорости горения топлива.
ventel> Есть желание исключить любой из компонентов в топливе.
Соответственно такого желания пока нет.
ventel> корпуса двигателей из ткани Т 13 или под большее довление ТР 03 с сопловым блоком из графит МПГ 7 .ТКАНЬ
Это приведёт к увеличению стоимости корпуса двигателя в 5-6 раз, при том же рабочем давлении. Попытки же увеличить рабочее давление приведут к ещё большему удорожанию корпуса и никакому увеличению высоты. Замена материала соплового блока приведёт к неработоспособности всего двигателя в целом, либо к многократным потерям в высоте.
С сахаром работал, аж 1998 года, как в порохах на НН и НК, так в карамели с 2001 года.
Самый первый состав моей карамели был:
Нитрат натрия - 60%;
Сорбит - 35%;
Сахар - 5%.
Сахар использовал тогда для загущения топлива. Только один сахар использовать очень сложно, почти невозможно. Он слишком высокую температуру плавления имеет.
ventel> У меня есть большое количество сокристаллизованного NN/NK в соотношении 80/20.
НК в больших двигателях потребуется в больших количествах. Например, сейчас один мой двигатель за одно испытание сжигает 2,15кг нитрата натрия. Если брать НК по цене в магазине в 200р/кг, то получается уже 430р., тогда как всё топливо на НН в этом двигателе стоит 350-400р. При том же давлении я получаю немного больший больший УИ и почти в 2 раза большую высоту полёта, благодаря занижению скорости горения топлива.
ventel> Есть желание исключить любой из компонентов в топливе.
Соответственно такого желания пока нет.
ventel> корпуса двигателей из ткани Т 13 или под большее довление ТР 03 с сопловым блоком из графит МПГ 7 .ТКАНЬ
Это приведёт к увеличению стоимости корпуса двигателя в 5-6 раз, при том же рабочем давлении. Попытки же увеличить рабочее давление приведут к ещё большему удорожанию корпуса и никакому увеличению высоты. Замена материала соплового блока приведёт к неработоспособности всего двигателя в целом, либо к многократным потерям в высоте.
Привет Саша! Поздравляю с успехами!!!!Можно тебя снова попросить скинуть выкройки ракеты из тех что не жалко! ") Сын просит!)
Сын просит!)
Сын просит!)

tatarin> Привет Саша! Поздравляю с успехами!!!!Можно тебя снова попросить скинуть выкройки ракеты из тех что не жалко! Сын просит!)
Спасибо!
Но я не совсем понял, о каких выкройках идёт речь?
Видео?
Или чертежи развёрток?
С последними у меня нет целостного законченного комплекта чертежей. Всё по кускам разбросано в куче разных файлов, где внутри каждого файла тоже бардак. Но в свете прошлогодних испытаний и полученного опыта именно для бумажных ракет, все предыдущие чертежи можно смело выкинуть, а новые ещё не готовы. Последнюю опытную ракету собирал по месту, изучая новую технологию сборки. Там ещё нет чертежей, если она отлетает успешно, то на её базе будут уже чертежи для новой ракеты.
Всё это делается мной сейчас в рамках исправления принципиальных ошибок в аэродинамике корпуса так, чтобы его не разрывало на куски на больших скоростях полёта и для уменьшения аэродинамических потерь, которые имели место быть больше, чем должно из-за этих ошибок.
Сын просит!)Спасибо!
Но я не совсем понял, о каких выкройках идёт речь?
Видео?
Или чертежи развёрток?
С последними у меня нет целостного законченного комплекта чертежей. Всё по кускам разбросано в куче разных файлов, где внутри каждого файла тоже бардак. Но в свете прошлогодних испытаний и полученного опыта именно для бумажных ракет, все предыдущие чертежи можно смело выкинуть, а новые ещё не готовы. Последнюю опытную ракету собирал по месту, изучая новую технологию сборки. Там ещё нет чертежей, если она отлетает успешно, то на её базе будут уже чертежи для новой ракеты.
Всё это делается мной сейчас в рамках исправления принципиальных ошибок в аэродинамике корпуса так, чтобы его не разрывало на куски на больших скоростях полёта и для уменьшения аэродинамических потерь, которые имели место быть больше, чем должно из-за этих ошибок.
SashaMaks> чертежи развёрток?
Да!Мы не будем запускать быстро и высоко.Надо только чтобы ракета выглядела красиво. вот и вспомнил о твоей технологии распечатать из фотобумаги.те развертки которые есть в сети они сложны для выклейки и запуска а твои в самый раз! нужны только выкладки на листе А4.
Да!Мы не будем запускать быстро и высоко.Надо только чтобы ракета выглядела красиво. вот и вспомнил о твоей технологии распечатать из фотобумаги.те развертки которые есть в сети они сложны для выклейки и запуска а твои в самый раз! нужны только выкладки на листе А4.
tatarin> нужны только выкладки на листе А4.
А какие именно?
А какие именно?
tatarin>> нужны только выкладки на листе А4.
SashaMaks> А какие именно?
Примерно такие:
SashaMaks> А какие именно?
Примерно такие:
Прикреплённые файлы:

tatarin>> нужны только выкладки на листе А4.
SashaMaks> А какие именно?
Любой ракеты какой сможешь!) Если нет возможности то и на этом спасибо!)
SashaMaks> А какие именно?
Любой ракеты какой сможешь!) Если нет возможности то и на этом спасибо!)
tatarin> Примерно такие:
Я имел в виду, на какой размер ракеты?
Я имел в виду, на какой размер ракеты?
tatarin>> Примерно такие:
SashaMaks> Я имел в виду, на какой размер ракеты?
Высотой примерно от 50 до 70 см.
SashaMaks> Я имел в виду, на какой размер ракеты?
Высотой примерно от 50 до 70 см.
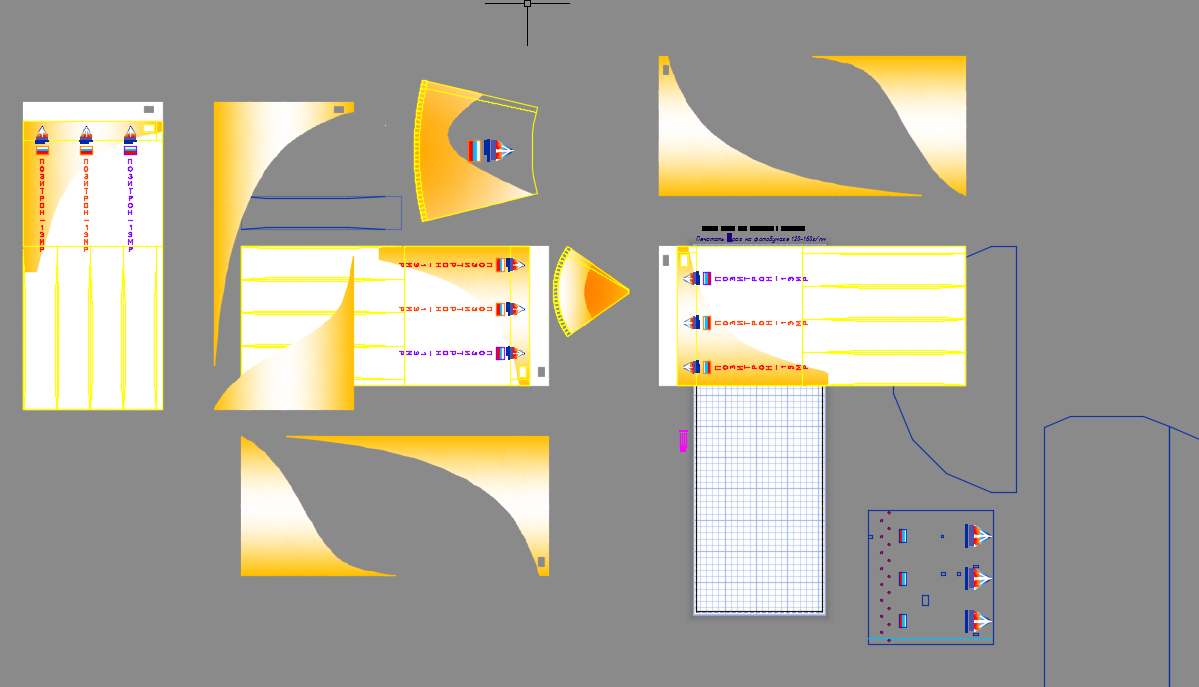
tatarin> Высотой примерно от 50 до 70 см.
Вот эта:

чуть примерно 750мм, диаметром 68мм.
Подойдёт?
Раскраска у неё и чертежи в формате AutoCAD.dwg
Вот эта:
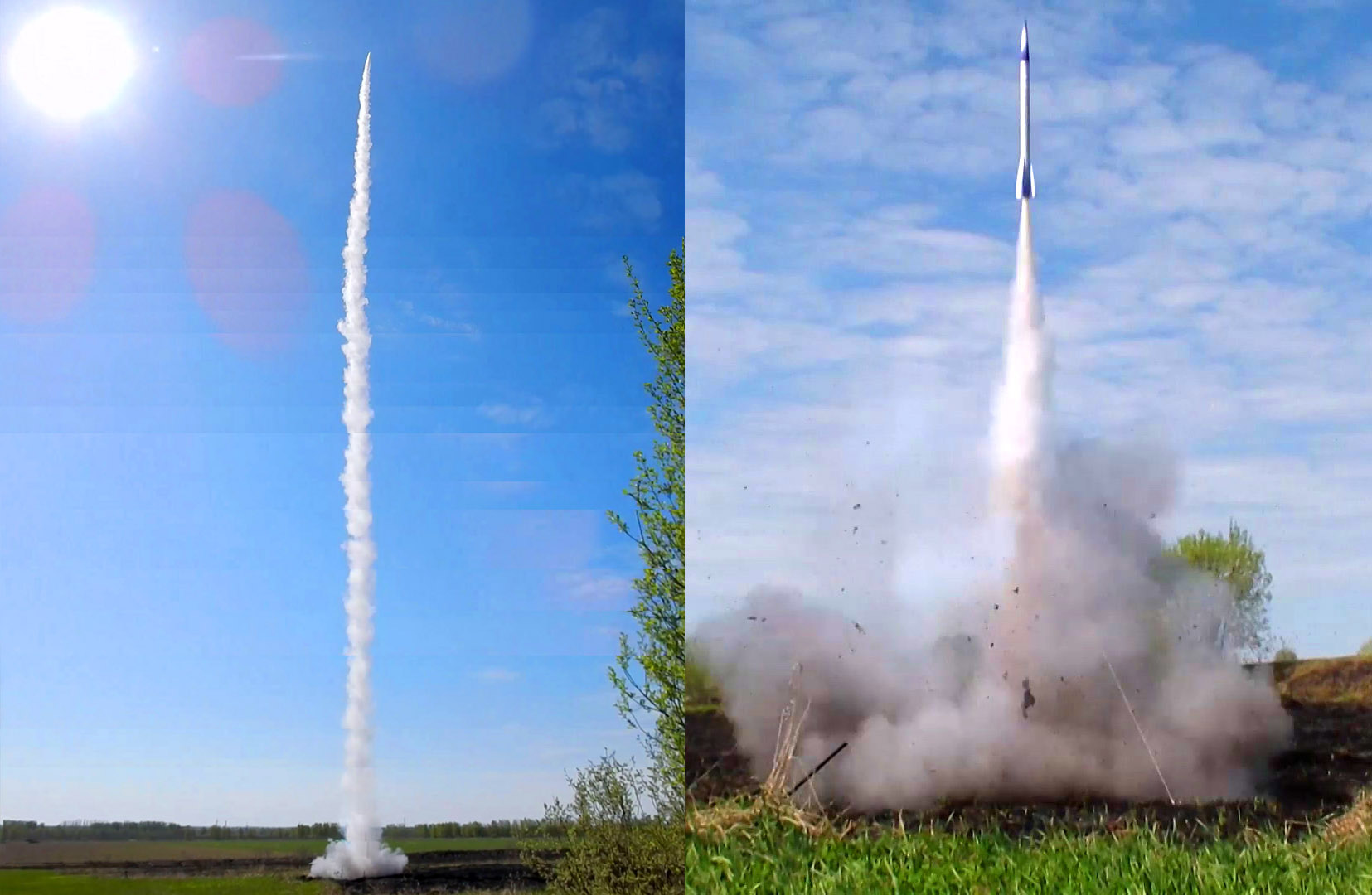
Конструкция ракет XI [SashaMaks#28.04.16 19:58]
К новому готовлю свою новую ракету "Позитрон". Предполагается возможность использования съёмного двигателя от самых малых, до 64мм диаметром по корпусу и удлинением L/D = 5 по топливу.// Ракетомодельныйчуть примерно 750мм, диаметром 68мм.
Подойдёт?
Раскраска у неё и чертежи в формате AutoCAD.dwg
SashaMaks> Вот эта:
Подойдет!!!!
SashaMaks> Раскраска у неё и чертежи в формате AutoCAD.dwg
Автокада нет. Фотошопом можно же ее распечатать???
Подойдет!!!!
SashaMaks> Раскраска у неё и чертежи в формате AutoCAD.dwg
Автокада нет. Фотошопом можно же ее распечатать???
Это сообщение редактировалось 05.05.2016 в 20:39
tatarin> Автокада нет. Фотошопом можно же ее распечатать???
Я могу перевести листы из файла в pdf формат, от туда легко можно будет распечатать в нужном правильном масштабе.
Тогда всё равно мне нужно время оформить там всё, а то некоторые детали обшивки я печатал кусками и не очень понятно что и как.
Ещё в ней я применил для стабилизаторов новую технологию создания сот, которую уже давно хотел опробовать - это вспененная эпоксидка. Но, если скорости полётов планируются небольшие (где-то до 200м/с), то в этом нет необходимости.
Я могу перевести листы из файла в pdf формат, от туда легко можно будет распечатать в нужном правильном масштабе.
Тогда всё равно мне нужно время оформить там всё, а то некоторые детали обшивки я печатал кусками и не очень понятно что и как.
Ещё в ней я применил для стабилизаторов новую технологию создания сот, которую уже давно хотел опробовать - это вспененная эпоксидка. Но, если скорости полётов планируются небольшие (где-то до 200м/с), то в этом нет необходимости.
Прикреплённые файлы:
SashaMaks> Я могу перевести листы из файла в pdf
Если есть возможность сделать легко то конечно это лучше. Но если это займет много времени то пожалуйста не стоит!!! И я уже однажды переводил из одного формата в другой.там потом несовпадения случаются.Постараюсь распечатать как выслал а не получится то потом придумаю как сделать ракету. Большое тебе спасибо и на этом!!!
Если есть возможность сделать легко то конечно это лучше. Но если это займет много времени то пожалуйста не стоит!!! И я уже однажды переводил из одного формата в другой.там потом несовпадения случаются.Постараюсь распечатать как выслал а не получится то потом придумаю как сделать ракету. Большое тебе спасибо и на этом!!!
tatarin> Если есть возможность сделать легко то конечно это лучше. Но если это займет много времени то пожалуйста не стоит!!!
Это совсем того не стоит. Я бракую эту ракету и всю её конструкцию. Сделал две попытки пуска и ни одна не состоялась. Проблем, замечаний и изменений накопилось столько за 2 рекордных месяца её подготовки к первому пуску, что нужна совершенно другая конструкция ракеты. А эту я пока оцениваю, как самую сложную в исполнении и использовании настолько, что её использование не возможно в принципе. Теперь нужно придумать что-то действительно многофункциональное и очень простое.
Удивило ещё то, сколько проблем мне доставила бортовая видеокамера. Всё пытался сделать проще её использование в составе общего БРОЭ и ничего не вышло. Из за засилия менюшек по-простому её не включить, выпаять кнопки на периферию невероятно сложно из-за её мизерности. Толком этого так и не сделал. Все манипуляции сделать это на автомате с питанием через usb полностью провалились. И ведь всё работало даже, и стабилизатор питания отдельный её вывел на 5В, но в результате более продолжительных и дотошных тестов выяснилось, что при питании от usb порта камера всегда почему-то записывает только не более 50с записи, хотя сами файлы гораздо больше по размерам, и вытащить из них остальное видео не возможно. Именно поэтому у меня с прошлого лета не было ни одной видеозаписи с борта. Тогда мне казалась, что камера просто дохла из-за просадки напряжения от батарей быстро, а оно воно как всё хитро вышло на самом деле. Теперь нужен отдельный внешний пульт или какой-то хитрый алгоритм управления и только отдельный блок питания напрямую. Так всё работает. Но для дополнительного аккумулятора в ракете уже просто нет места.
С трекером тоже много проблем вышло с его подключением от общего БП из двух аккумуляторов. Так, что там только чудом мой контроллер ещё работал и не вышло непоправимых ошибок с работой силовых ключей. А ток шёл через нихромовые запалы на схему и пытался запустить контроллер. При этом выключить это не возможно было. Либо нужны ещё кнопки наружу, либо отдельный БП и для трекера. А трекер через стабилизатор напряжения подключить невозможно, ему тока не хватает и антенна не работает. А кривая схема просто опасна. И тут тоже нет места для аккумулятора.
В итоге вместо 2-х аккумуляторов нужно минимум 4.
И о чудо! Я впервые в своей практике увидел отсыревшее карамельное топливо в двигателе))) Давно тут про это писали, и то, почему у меня этого не наблюдалось, списывали на грязный НН. Но вот стоило мне только взять в руки НК, как вот уже и результат есть. Но разбираться в этом я не собираюсь, мне это сейчас не интересно, не нужно и времени нет. Поэтому буду делать мелкие двигатели на НК как есть для опытных запусков непосредственно под пуск без хранения и с усиленными мерами по влагоизоляции.
Это совсем того не стоит. Я бракую эту ракету и всю её конструкцию. Сделал две попытки пуска и ни одна не состоялась. Проблем, замечаний и изменений накопилось столько за 2 рекордных месяца её подготовки к первому пуску, что нужна совершенно другая конструкция ракеты. А эту я пока оцениваю, как самую сложную в исполнении и использовании настолько, что её использование не возможно в принципе. Теперь нужно придумать что-то действительно многофункциональное и очень простое.
Удивило ещё то, сколько проблем мне доставила бортовая видеокамера. Всё пытался сделать проще её использование в составе общего БРОЭ и ничего не вышло. Из за засилия менюшек по-простому её не включить, выпаять кнопки на периферию невероятно сложно из-за её мизерности. Толком этого так и не сделал. Все манипуляции сделать это на автомате с питанием через usb полностью провалились. И ведь всё работало даже, и стабилизатор питания отдельный её вывел на 5В, но в результате более продолжительных и дотошных тестов выяснилось, что при питании от usb порта камера всегда почему-то записывает только не более 50с записи, хотя сами файлы гораздо больше по размерам, и вытащить из них остальное видео не возможно. Именно поэтому у меня с прошлого лета не было ни одной видеозаписи с борта. Тогда мне казалась, что камера просто дохла из-за просадки напряжения от батарей быстро, а оно воно как всё хитро вышло на самом деле. Теперь нужен отдельный внешний пульт или какой-то хитрый алгоритм управления и только отдельный блок питания напрямую. Так всё работает. Но для дополнительного аккумулятора в ракете уже просто нет места.
С трекером тоже много проблем вышло с его подключением от общего БП из двух аккумуляторов. Так, что там только чудом мой контроллер ещё работал и не вышло непоправимых ошибок с работой силовых ключей. А ток шёл через нихромовые запалы на схему и пытался запустить контроллер. При этом выключить это не возможно было. Либо нужны ещё кнопки наружу, либо отдельный БП и для трекера. А трекер через стабилизатор напряжения подключить невозможно, ему тока не хватает и антенна не работает. А кривая схема просто опасна. И тут тоже нет места для аккумулятора.
В итоге вместо 2-х аккумуляторов нужно минимум 4.
И о чудо! Я впервые в своей практике увидел отсыревшее карамельное топливо в двигателе))) Давно тут про это писали, и то, почему у меня этого не наблюдалось, списывали на грязный НН. Но вот стоило мне только взять в руки НК, как вот уже и результат есть. Но разбираться в этом я не собираюсь, мне это сейчас не интересно, не нужно и времени нет. Поэтому буду делать мелкие двигатели на НК как есть для опытных запусков непосредственно под пуск без хранения и с усиленными мерами по влагоизоляции.

SashaMaks> Удивило ещё то, сколько проблем мне доставила бортовая видеокамера. Всё пытался сделать проще её использование в составе общего БРОЭ и ничего не вышло. Из за засилия менюшек по-простому её не включить, выпаять кнопки на периферию невероятно сложно из-за её мизерности.
Такая же хрень.
SashaMaks>Я впервые в своей практике увидел отсыревшее карамельное топливо в двигателе)))
Одна из трёх причин, по которой я не использую карамель.
Такая же хрень.
SashaMaks>Я впервые в своей практике увидел отсыревшее карамельное топливо в двигателе)))
Одна из трёх причин, по которой я не использую карамель.



SashaMaks> ....выпаять кнопки на периферию невероятно сложно из-за её мизерности....
Можно не выпаивать кнопки. Подпаять провода параллельно контактам на плате и к ним уже кнопку. Если, конечно, есть такая возможность.
Можно не выпаивать кнопки. Подпаять провода параллельно контактам на плате и к ним уже кнопку. Если, конечно, есть такая возможность.

Massaraksh> Одна из трёх причин, по которой я не использую карамель.
Тут не всё так очевидно. Топливо за месяц хранения осталось пластичным. Аналогичный состав на НН такого не давал, а влажность действует только по поверхности. И всё это сейчас очень странно, так как другой списанный двигатель с немного другой карамелью на НК нисколько не отсырел за ещё большее время хранения. И у него даже сопло не было закрыто. Надо разбираться, но не сейчас.
Тут не всё так очевидно. Топливо за месяц хранения осталось пластичным. Аналогичный состав на НН такого не давал, а влажность действует только по поверхности. И всё это сейчас очень странно, так как другой списанный двигатель с немного другой карамелью на НК нисколько не отсырел за ещё большее время хранения. И у него даже сопло не было закрыто. Надо разбираться, но не сейчас.
Skyangel> Можно не выпаивать кнопки. Подпаять провода параллельно контактам на плате и к ним уже кнопку.
Именно это я и делал, но камера китайская и кнопки так по-разному работают, сейчас я рискнул и проверил это. Например, чтобы её просто включить на запись нужно нажать минимум 2 кнопки, причём первую на 3-4с. И эти кнопки работают с разной подтяжкой. Т.е. по-простому их сейчас не подключить к моему контроллеру, поэтому только первую развёл, а вторую пока можно на периферию пустить или же потратить ещё кучу времени на разработку дополнительной схемы подключения. А площадки для подпайки у этих самых маленьких тактовых кнопок всего лишь 0,5х0,5мм остались и ещё к ним нужно суметь подпаяться. Сложно, но можно.
Именно это я и делал, но камера китайская и кнопки так по-разному работают, сейчас я рискнул и проверил это. Например, чтобы её просто включить на запись нужно нажать минимум 2 кнопки, причём первую на 3-4с. И эти кнопки работают с разной подтяжкой. Т.е. по-простому их сейчас не подключить к моему контроллеру, поэтому только первую развёл, а вторую пока можно на периферию пустить или же потратить ещё кучу времени на разработку дополнительной схемы подключения. А площадки для подпайки у этих самых маленьких тактовых кнопок всего лишь 0,5х0,5мм остались и ещё к ним нужно суметь подпаяться. Сложно, но можно.
SashaMaks> Именно это я и делал, но камера китайская и кнопки так по-разному работают, сейчас я рискнул и проверил это. Например, чтобы её просто включить на запись нужно нажать минимум 2 кнопки, причём первую на 3-4с.
А, ну у меня была, видимо, такая же.
А, ну у меня была, видимо, такая же.

Massaraksh> А, ну у меня была, видимо, такая же.
Нет, вот эта, только модель чуть по старее:

Мне в ней габариты нравятся и качество картинки на высоком разрешении. Она почти не мажет при движении и цифровых помех при сжатии кадра не видно. За это и приходится платить её прожорливостью. Так Литиевый аккумулятор АА она разряжает за 10мин. При том ей нужно строго определенный уровень напряжения и тока.
Нет, вот эта, только модель чуть по старее:
Аксессуары Neoline
Neoline Cubex V 15 - это миниатюрный стильный видеорегистратор с качеством записи Full HD и широким углом обзора. Реалистичность съемки достигается благодаря устранению эффекта fish-eye и автокоррекции баланса белого. © 2006–2016 Neoline — Автоэлектроника и аксессуары Информация на сайте не является публичной офертой // neoline.ruМне в ней габариты нравятся и качество картинки на высоком разрешении. Она почти не мажет при движении и цифровых помех при сжатии кадра не видно. За это и приходится платить её прожорливостью. Так Литиевый аккумулятор АА она разряжает за 10мин. При том ей нужно строго определенный уровень напряжения и тока.
SashaMaks> Так Литиевый аккумулятор АА она разряжает за 10мин.
Год назад я её использовал целиком, а сейчас вытащил все её платы и оставил без корпуса, так получилось ещё компактнее. Оптика у неё находится в отдельном корпусе, закрепленном на плате. Уже полноценное БРЭО с контроллером, трекером и качественной камерой на аккумуляторах можно легко засунуть в ракету диаметром до 40мм. Масса всего примерно 100-120г.
Год назад я её использовал целиком, а сейчас вытащил все её платы и оставил без корпуса, так получилось ещё компактнее. Оптика у неё находится в отдельном корпусе, закрепленном на плате. Уже полноценное БРЭО с контроллером, трекером и качественной камерой на аккумуляторах можно легко засунуть в ракету диаметром до 40мм. Масса всего примерно 100-120г.
Почти готов новый головной отсек. С новым корпусом для электроники. Полностью перепроектированный и уже собранный. Хвостовой отсек удалось адаптировать под этот головной отсек. Получилось всё очень компактно так, что, если бы я это только в 3D проектировал, то вряд ли бы так решился ужиматься...
Но всё поместилось и ничего лишнего не осталось. От предварительных испытаний на маленьких двигателях с калиевой карамелью я решил полностью отказаться. По-простому там всё равно ничего не получилось, а раз всё с ними так же сложно, как и с моими на натриевой карамели, то пусть будет сразу двигатель на натриевой карамели и сразу на 1,3кг топлива.
По этому случаю решил, пользуясь нелётной погодой, всё как следует протестировать. И не зря, нашёл и косяк в коде, где значения ускорения для алгоритма брались из старой переменной, в которую ничего не записывалось. Жуть - это могло бы стоить всего полёта... Доработал программу предварительным алгоритмом последовательного включения всех устройств с учётом всех их особенностей. Общее же управление свелось к нажатию всего двух кнопок.
1. Сначала включается основное питание на контроллер, после чего, контроллер запускает простой таймер, который сразу же включает трекер на 5мин инициализации и гарантированного нахождения им спутников.
2. При этом уже на 4-ой минуте происходит сигнализация звуком в течении 1 минуты, о необходимости включения камеры. Поэтому, если за 5 мин. не удастся убедиться в том, что трекер запустился и нашёл спутники и прислал правильные координаты на сотовый, то всю программу старта можно легко отменить, просто выключив контроллер до того, как он включит камеру. Иначе, если он включит камеру, то у неё будет только 10 мин запаса аккумулятора на запись и любое не расчётное записывание тут быстро истратит его...
3. Если же трекер настроился за 5 мин корректно и координаты есть, то на 5-ой минуте контроллер включает питание на камеру, звуком сигнализируется задержка на инициализацию камеры до того, как можно будет нажать вторую кнопку на пульте, включив запись на камере в ручную. Это задержка составляет примерно 10сек.
4. Ещё минута остаётся на то, чтобы уйти с места старта. С этого момента, если не прервать работу контроллера на месте вручную через его питание, весь полёт ракетой будет проходить в автоматическом режиме.
5. Через 6 мин после включения контроллера и успешного включения трекера и камеры, включается основной алгоритм полётной программы, где 10 сек даётся на своего рода обратный отсчёт, когда алгоритм тестирует всё происходящее по датчикам и самонастраивается по окружающим условиям, готовясь к запуску двигателя и ракеты.
6. После п.5. контроллер выдаёт команду на первый силовой ключ, и запускает двигатель сам с борта без применения внешней системы зажигания.
7. После п.6. включается алгоритм определения старта ракеты и алгоритм отмены пуска, если старт не будет детектирован за указанное в программе время.
8. Если старта определен, то начинает работать основная полётная программа, если нет, то происходит полное выключение контроллера и сигнализация о данной неполадке.
Это в общих чертах только начала алгоритма работы программы)))
Для тестирования я уже делал проверку на всё это за столом, всё работает. Но ещё предстоит завтра сделать финальную вылазку на улицу в реальные уличные условия для тестирования всего этого в сборе в корпусе головного отсека, кроме запуска двигателя и работы основного алгоритма. Нужно убедиться, что в поле за 15 км, всё сработает с первого раза и без ошибок.
А пока провёл вторую часть генерального испытания работы головного отсека - работы системы спасения и основного алгоритма программы с проверкой всего, вплоть до возможных повреждений за время возьни с этим делом. Испытание прошло успешно.
Успешно отработал парашют, новая ткань, очень плохо мнётся, что хорошо, она сама раскрывается при выбросе даже без потока воздуха, но её стало и тяжелее упаковывать.
Утяжеление носовой части, а это единственное место, что осталось для этого, привело к тому, что фал носового обтекателя придётся фиксировать намертво, иначе он соскальзывает по инерции по парашютным фалам до самого парашюта, стягивая стропы. По сути - это чревато нераскрытым парашютом и разбиванием всей ракеты вдребезги. Поэтому данное испытание было очень полезным.
В остальном всё получилось как и хотелось.
В тесте применял новую пластиковую коробку с обычной крышкой с самодельным силиконовым уплотнением на скоро руку, поэтому сделать заметного разрежения не получилось. То, что вышло, еле-еле хватило, чтобы провести сам тест, но тоже очень интересно, что у алгоритма хватило логики, всё понять правильно.
Конечно, ко всей конструкции головного отсека есть ещё ряд потенциальных доработок на случая падения её в водоёмы и прочих нештатных ситуаций для повышения живучести, но это всё останется до следующего раза, так как требует основательных переделок и новых разработок...
Но всё поместилось и ничего лишнего не осталось. От предварительных испытаний на маленьких двигателях с калиевой карамелью я решил полностью отказаться. По-простому там всё равно ничего не получилось, а раз всё с ними так же сложно, как и с моими на натриевой карамели, то пусть будет сразу двигатель на натриевой карамели и сразу на 1,3кг топлива.
По этому случаю решил, пользуясь нелётной погодой, всё как следует протестировать. И не зря, нашёл и косяк в коде, где значения ускорения для алгоритма брались из старой переменной, в которую ничего не записывалось. Жуть - это могло бы стоить всего полёта... Доработал программу предварительным алгоритмом последовательного включения всех устройств с учётом всех их особенностей. Общее же управление свелось к нажатию всего двух кнопок.
1. Сначала включается основное питание на контроллер, после чего, контроллер запускает простой таймер, который сразу же включает трекер на 5мин инициализации и гарантированного нахождения им спутников.
2. При этом уже на 4-ой минуте происходит сигнализация звуком в течении 1 минуты, о необходимости включения камеры. Поэтому, если за 5 мин. не удастся убедиться в том, что трекер запустился и нашёл спутники и прислал правильные координаты на сотовый, то всю программу старта можно легко отменить, просто выключив контроллер до того, как он включит камеру. Иначе, если он включит камеру, то у неё будет только 10 мин запаса аккумулятора на запись и любое не расчётное записывание тут быстро истратит его...
3. Если же трекер настроился за 5 мин корректно и координаты есть, то на 5-ой минуте контроллер включает питание на камеру, звуком сигнализируется задержка на инициализацию камеры до того, как можно будет нажать вторую кнопку на пульте, включив запись на камере в ручную. Это задержка составляет примерно 10сек.
4. Ещё минута остаётся на то, чтобы уйти с места старта. С этого момента, если не прервать работу контроллера на месте вручную через его питание, весь полёт ракетой будет проходить в автоматическом режиме.
5. Через 6 мин после включения контроллера и успешного включения трекера и камеры, включается основной алгоритм полётной программы, где 10 сек даётся на своего рода обратный отсчёт, когда алгоритм тестирует всё происходящее по датчикам и самонастраивается по окружающим условиям, готовясь к запуску двигателя и ракеты.
6. После п.5. контроллер выдаёт команду на первый силовой ключ, и запускает двигатель сам с борта без применения внешней системы зажигания.
7. После п.6. включается алгоритм определения старта ракеты и алгоритм отмены пуска, если старт не будет детектирован за указанное в программе время.
8. Если старта определен, то начинает работать основная полётная программа, если нет, то происходит полное выключение контроллера и сигнализация о данной неполадке.
Это в общих чертах только начала алгоритма работы программы)))
Для тестирования я уже делал проверку на всё это за столом, всё работает. Но ещё предстоит завтра сделать финальную вылазку на улицу в реальные уличные условия для тестирования всего этого в сборе в корпусе головного отсека, кроме запуска двигателя и работы основного алгоритма. Нужно убедиться, что в поле за 15 км, всё сработает с первого раза и без ошибок.
А пока провёл вторую часть генерального испытания работы головного отсека - работы системы спасения и основного алгоритма программы с проверкой всего, вплоть до возможных повреждений за время возьни с этим делом. Испытание прошло успешно.
Успешно отработал парашют, новая ткань, очень плохо мнётся, что хорошо, она сама раскрывается при выбросе даже без потока воздуха, но её стало и тяжелее упаковывать.
Утяжеление носовой части, а это единственное место, что осталось для этого, привело к тому, что фал носового обтекателя придётся фиксировать намертво, иначе он соскальзывает по инерции по парашютным фалам до самого парашюта, стягивая стропы. По сути - это чревато нераскрытым парашютом и разбиванием всей ракеты вдребезги. Поэтому данное испытание было очень полезным.
В остальном всё получилось как и хотелось.
В тесте применял новую пластиковую коробку с обычной крышкой с самодельным силиконовым уплотнением на скоро руку, поэтому сделать заметного разрежения не получилось. То, что вышло, еле-еле хватило, чтобы провести сам тест, но тоже очень интересно, что у алгоритма хватило логики, всё понять правильно.
Конечно, ко всей конструкции головного отсека есть ещё ряд потенциальных доработок на случая падения её в водоёмы и прочих нештатных ситуаций для повышения живучести, но это всё останется до следующего раза, так как требует основательных переделок и новых разработок...
Прикреплённые файлы:


к
SashaMaks> Самый первый состав моей карамели был:
SashaMaks> Нитрат натрия - 60%;
SashaMaks> Сорбит - 35%;
SashaMaks> Сахар - 5%.
SashaMaks> Сахар использован к ещё большему удорожанию корпуса и никакому увеличению высоты. Саша .Нитрат натрия 60% /фруктоза 30% /сорбидол 10% Твоя страница не работает ! Собираю двигатель с внутреннним диаметром 40 мм . Топливо твое . Описанное выше . Одна шашка со "звездой" . Заряд вкладной . Корпус двигателя труба Д16 т . 45*2.5 500 ММ. Верхняя крышка из АМГ 5 с изоляцией . сопловой блок Д16 т со вставкой или полностью точенным из граффита . Вопрос . Как выбрать толщину и количество слоев теплоизоляции .Учитывая что этот двигатель будет работать 3-4 раза с учетом снятия "кривой" со стенда . То есть если он отработает штатно один раз на старте то значит все окейушки.
SashaMaks> Самый первый состав моей карамели был:
SashaMaks> Нитрат натрия - 60%;
SashaMaks> Сорбит - 35%;
SashaMaks> Сахар - 5%.
SashaMaks> Сахар использован к ещё большему удорожанию корпуса и никакому увеличению высоты. Саша .Нитрат натрия 60% /фруктоза 30% /сорбидол 10% Твоя страница не работает ! Собираю двигатель с внутреннним диаметром 40 мм . Топливо твое . Описанное выше . Одна шашка со "звездой" . Заряд вкладной . Корпус двигателя труба Д16 т . 45*2.5 500 ММ. Верхняя крышка из АМГ 5 с изоляцией . сопловой блок Д16 т со вставкой или полностью точенным из граффита . Вопрос . Как выбрать толщину и количество слоев теплоизоляции .Учитывая что этот двигатель будет работать 3-4 раза с учетом снятия "кривой" со стенда . То есть если он отработает штатно один раз на старте то значит все окейушки.
Copyright © Balancer 1997..2024
Создано 30.08.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 30.08.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}