 mihail66
mihail66
 инфо
инфо инструменты
инструменты Xan
Xan


 Plant
Plant

 avmich
avmich
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/3d/3dnews/assets/external/illustrations/2010/10/13/600098/128x128-crop/mems-accelerometer-2-big.jpg)
Использование микроэлектромеханических (MEMS) акселерометров в ракетомоделях
Теги:

mihail66> Ты сейчас меня наверно "побьешь", но с воздухом и вертикально для оси Z - сила торможения минус гравитация, для остальных осей "0".
mihail66> Если под углом, то сила торможения "-" проекция силы гравитации.
"Угол атаки" я никак не учитываю, это уже в мозгах, надо как-то исправляться.
Вот смотри, (пример из моей прошлой деятельности).
Измерение нагрузок на валу.
Деформация вращением измеряется тензо-датчиками и элементами Хола.
Осевое биение измеряется акселерометрами.
И вал стоит под углом 6 градусов к горизонтали.
И аналоговая электроника на валу вычитает постоянную гравитации и отправляет только переменную с вращающегося вала через индуктор.
Сбалансировав вал имею "ровную прямую", а переключаюсь на акселерометры получаю наклон вала.
Угла атаки нет!!!
mihail66> Если под углом, то сила торможения "-" проекция силы гравитации.
"Угол атаки" я никак не учитываю, это уже в мозгах, надо как-то исправляться.
Вот смотри, (пример из моей прошлой деятельности).
Измерение нагрузок на валу.
Деформация вращением измеряется тензо-датчиками и элементами Хола.
Осевое биение измеряется акселерометрами.
И вал стоит под углом 6 градусов к горизонтали.
И аналоговая электроника на валу вычитает постоянную гравитации и отправляет только переменную с вращающегося вала через индуктор.
Сбалансировав вал имею "ровную прямую", а переключаюсь на акселерометры получаю наклон вала.
Угла атаки нет!!!


mihail66>
Попробуй рассмотреть, какие ускорения получатся в самолётена конвейере, делающего мёртвую петлю. На разных участках.
Варианты: с постоянной скоростью (с работающим пропеллером); безмоторный планер.
Попробуй рассмотреть, какие ускорения получатся в самолёте
Варианты: с постоянной скоростью (с работающим пропеллером); безмоторный планер.


Xan> Попробуй рассмотреть....
Спасибо, Xan.
До меня уже начинает доходить, и тут я спотыкаюсь на том, что когда летящее тело находится в торможении то у акселерометра появляется опора. А если тело при этом вращается, то возникает бурное желание поиметь показания с боковых осей.
Не будем рассматривать планер в мертвой петле.
Вот ракета летит вертикально, вращается и тормозит.
На оси Z ускорение, на оси Х - "ноль".
Вот ракета отклонилась от вертикали.
На оси Z ускорение, на оси Х - что (проекция силы чего)?
Угла атаки и торможения?
Но ведь должна присутствовать и сила гравитации, которая при вращении выписывает синусоиду.
Спасибо, Xan.
До меня уже начинает доходить, и тут я спотыкаюсь на том, что когда летящее тело находится в торможении то у акселерометра появляется опора. А если тело при этом вращается, то возникает бурное желание поиметь показания с боковых осей.
Не будем рассматривать планер в мертвой петле.
Вот ракета летит вертикально, вращается и тормозит.
На оси Z ускорение, на оси Х - "ноль".
Вот ракета отклонилась от вертикали.
На оси Z ускорение, на оси Х - что (проекция силы чего)?
Угла атаки и торможения?
Но ведь должна присутствовать и сила гравитации, которая при вращении выписывает синусоиду.
Это сообщение редактировалось 08.10.2017 в 10:28

Б.г.>>если вернуть воздух, сколько будет показывать акселерометр в мячике?
mihail66> Ты сейчас меня наверно "побьешь", но с воздухом и вертикально для оси Z - сила торможения минус гравитация, для остальных осей "0".
Нет. Только сила торможения об воздух.
mihail66> Если под углом, то сила торможения "-" проекция силы гравитации.
Нет. Только сила торможения об воздух.
Мы же договорились, что, без воздуха - ноль. Как может появление воздуха повлиять на отсутствующую до этого величину?
Подчеркну, графики будут разными. Потому что сила торможения об воздух зависит от скорости относительно воздуха, а она будет чуть отличаться при наклонном полёте - при вертикальном есть точка остановки, где будет точная невесомость, а при наклонном горизонтальная проекция всегда отличается от нуля, а, значит, сила торможения всегда присутствует.
Но это явление не позволяет определить, насколько ракета повернулась в полёте.
mihail66> Ты сейчас меня наверно "побьешь", но с воздухом и вертикально для оси Z - сила торможения минус гравитация, для остальных осей "0".
Нет. Только сила торможения об воздух.
mihail66> Если под углом, то сила торможения "-" проекция силы гравитации.
Нет. Только сила торможения об воздух.
Мы же договорились, что, без воздуха - ноль. Как может появление воздуха повлиять на отсутствующую до этого величину?
Подчеркну, графики будут разными. Потому что сила торможения об воздух зависит от скорости относительно воздуха, а она будет чуть отличаться при наклонном полёте - при вертикальном есть точка остановки, где будет точная невесомость, а при наклонном горизонтальная проекция всегда отличается от нуля, а, значит, сила торможения всегда присутствует.
Но это явление не позволяет определить, насколько ракета повернулась в полёте.
mihail66>> ...но с воздухом и вертикально для оси Z - сила торможения минус гравитация, для остальных осей "0".
Б.г.> Нет. Только сила торможения об воздух.
Стоп, стоп! У меня сейчас возник шквал вопросов.
Я сейчас вспоминаю твой шикарный ликбез.
Когда ракета стоит на "стартовой", то вертикальный аксель. показывает g потому что есть опора, боковой дает "О".
Когда летит головой вниз с постоянной установившейся скоростью,
то вертикальный аксель. показывает минус g, потому что появилась опора (сила сопротивления воздуха), боковой по прежнему дает "0".
А если летит вниз под углом, то боковой должен это видеть.
А какая разница, тормозит ракета вверх или вниз?
Б.г.> Нет. Только сила торможения об воздух.
Стоп, стоп! У меня сейчас возник шквал вопросов.
Я сейчас вспоминаю твой шикарный ликбез.
Когда ракета стоит на "стартовой", то вертикальный аксель. показывает g потому что есть опора, боковой дает "О".
Когда летит головой вниз с постоянной установившейся скоростью,
то вертикальный аксель. показывает минус g, потому что появилась опора (сила сопротивления воздуха), боковой по прежнему дает "0".
А если летит вниз под углом, то боковой должен это видеть.
А какая разница, тормозит ракета вверх или вниз?
mihail66> А какая разница, тормозит ракета вверх или вниз?
Да, видимо на изменяющемся ускорении с боковых датчиков невозможно получить информацию на какой угол отклонилась ракета от вертикали.
А какой в таком случае самый простой способ зафиксировать отклонение?
Да, видимо на изменяющемся ускорении с боковых датчиков невозможно получить информацию на какой угол отклонилась ракета от вертикали.
А какой в таком случае самый простой способ зафиксировать отклонение?
mihail66> Когда ракета стоит на "стартовой", то вертикальный аксель. показывает g потому что есть опора, боковой дает "О".
Сила реакции опоры - это ответ на силу тяжести. Поэтому они обязательно совпадают по модулю и противоположны по направлению.
mihail66> Когда летит головой вниз с постоянной установившейся скоростью,
mihail66> то вертикальный аксель. показывает минус g, потому что появилась опора (сила сопротивления воздуха), боковой по прежнему дает "0".
Сила сопротивления воздуха - это не ответ на силу тяжести, это расход кинетической энергии ракеты. Поэтому сила сопротивления воздуха не обязана совпадать с силой тяжести по модулю.
То, что при отвесном падении с некоторой скоростью они совпадают, это просто из-за того, что расход потенциальной энергии, переходящей в кинетическую, в точности равен расходу кинетической, переходящей в тепло из-за сопротивления воздуха.
mihail66> А если летит вниз под углом, то боковой должен это видеть.
Боковой не должен этого видеть, поскольку, при нулевом угле атаки, ускорений поперёк ракеты нет.
Если ракета статически устойчива, и непрерывно поддерживает угол атаки равным нулю, то модуль ускорения вдоль ракеты может меняться, но, если воздух статичен, то акселерометры, стоящие в её центре тяжести, ничего не зарегистрируют по поперечным осям.
mihail66> А какая разница, тормозит ракета вверх или вниз?
разница существенная") когда ракета тормозит вверх, кинетическая энергия тратится куда быстрее, потому что она частично переходит в потенциальную, а частично - в тепло, а, когда ракета тормозит вниз, потенциальная энергия подпитывает кинетическую, в результате и может создаться иллюзия опоры
когда ракета тормозит вверх, кинетическая энергия тратится куда быстрее, потому что она частично переходит в потенциальную, а частично - в тепло, а, когда ракета тормозит вниз, потенциальная энергия подпитывает кинетическую, в результате и может создаться иллюзия опоры
Сила реакции опоры - это ответ на силу тяжести. Поэтому они обязательно совпадают по модулю и противоположны по направлению.
mihail66> Когда летит головой вниз с постоянной установившейся скоростью,
mihail66> то вертикальный аксель. показывает минус g, потому что появилась опора (сила сопротивления воздуха), боковой по прежнему дает "0".
Сила сопротивления воздуха - это не ответ на силу тяжести, это расход кинетической энергии ракеты. Поэтому сила сопротивления воздуха не обязана совпадать с силой тяжести по модулю.
То, что при отвесном падении с некоторой скоростью они совпадают, это просто из-за того, что расход потенциальной энергии, переходящей в кинетическую, в точности равен расходу кинетической, переходящей в тепло из-за сопротивления воздуха.
mihail66> А если летит вниз под углом, то боковой должен это видеть.
Боковой не должен этого видеть, поскольку, при нулевом угле атаки, ускорений поперёк ракеты нет.
Если ракета статически устойчива, и непрерывно поддерживает угол атаки равным нулю, то модуль ускорения вдоль ракеты может меняться, но, если воздух статичен, то акселерометры, стоящие в её центре тяжести, ничего не зарегистрируют по поперечным осям.
mihail66> А какая разница, тормозит ракета вверх или вниз?
разница существенная
") когда ракета тормозит вверх, кинетическая энергия тратится куда быстрее, потому что она частично переходит в потенциальную, а частично - в тепло, а, когда ракета тормозит вниз, потенциальная энергия подпитывает кинетическую, в результате и может создаться иллюзия опоры
когда ракета тормозит вверх, кинетическая энергия тратится куда быстрее, потому что она частично переходит в потенциальную, а частично - в тепло, а, когда ракета тормозит вниз, потенциальная энергия подпитывает кинетическую, в результате и может создаться иллюзия опоры
Б.г.> Сила реакции опоры - это ответ на силу тяжести. ....
Спасибо Б.г., все по полочкам!, получил истинное удовлетворение общаясь с тобой.
А какой в таком случае самый простой способ зафиксировать отклонение?
Теперь вопрос немного не по теме, но в ту-же сторону.
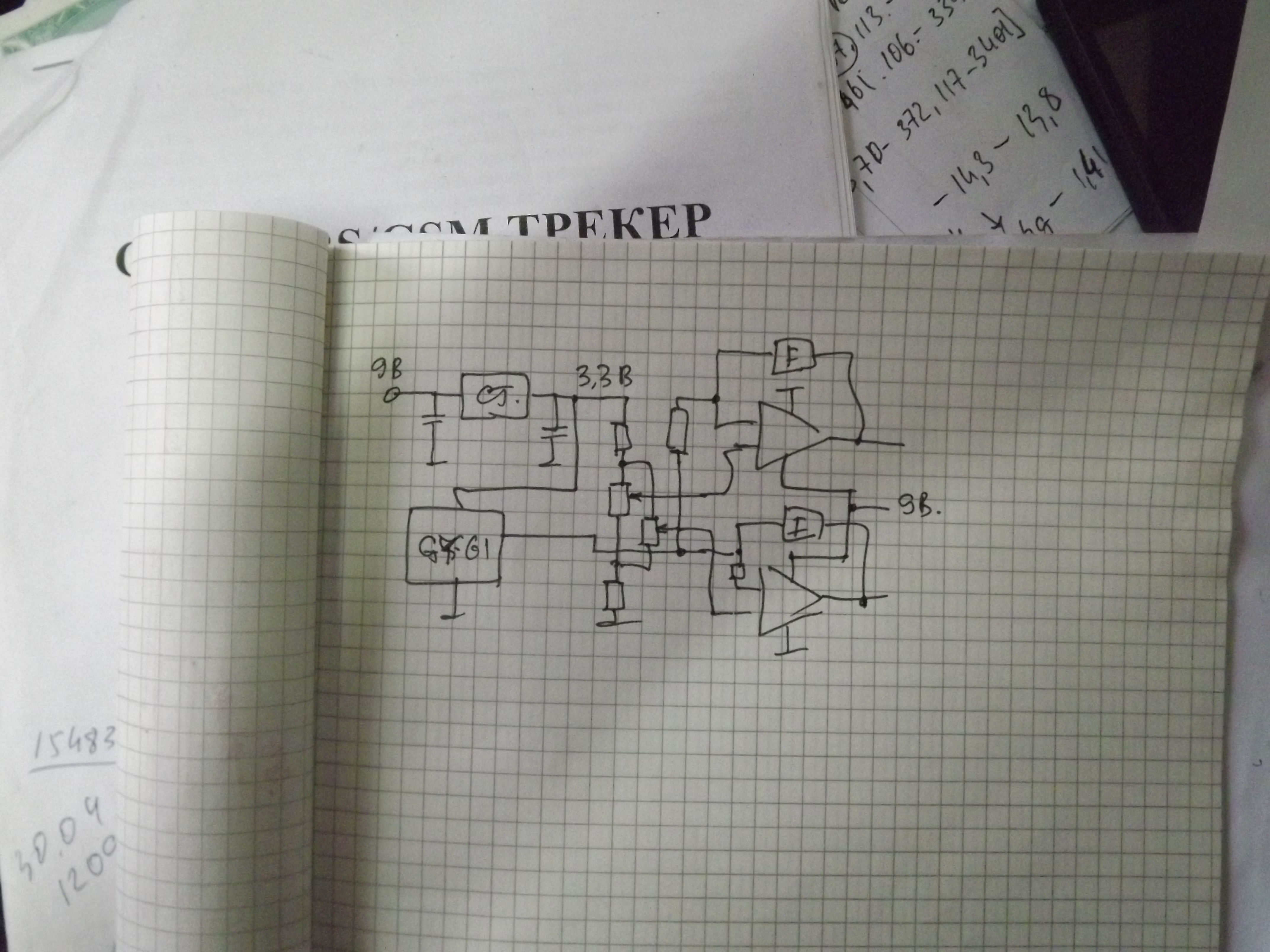
Сейчас собрал датчик ускорения на GY-61 (такой-же улетел в неведомую даль, когда по моей ошибке альтиметр разрешил измерить ускорение),
там принцип простой - опорное напряжение и два компаратора с фильтрами фиксирующие ускорения,
но плывет опорное напряжение, и сильно плывет процентов на 20.
Цепочка задающих резисторов высокоомная 2,2М, греться и плыть не должна.
Может ли операционник (компаратор) так "гулять"? (LM358)
Коэффициент усиления 14000, частота среза 0,1Гц.
Спасибо Б.г., все по полочкам!, получил истинное удовлетворение общаясь с тобой.
А какой в таком случае самый простой способ зафиксировать отклонение?
Теперь вопрос немного не по теме, но в ту-же сторону.
Сейчас собрал датчик ускорения на GY-61 (такой-же улетел в неведомую даль, когда по моей ошибке альтиметр разрешил измерить ускорение),
там принцип простой - опорное напряжение и два компаратора с фильтрами фиксирующие ускорения,
но плывет опорное напряжение, и сильно плывет процентов на 20.
Цепочка задающих резисторов высокоомная 2,2М, греться и плыть не должна.
Может ли операционник (компаратор) так "гулять"? (LM358)
Коэффициент усиления 14000, частота среза 0,1Гц.
Прикреплённые файлы:
Это сообщение редактировалось 08.10.2017 в 15:48
mihail66> А какой в таком случае самый простой способ зафиксировать отклонение?
Аналоговый гироскоп, но на выходе у него - не полноценный интегратор, а две пороговые цепи. Одна, первая, пороговая по амплитуде - что угловая скорость превысила некий предел. Другая - пороговая по времени, например, на 555 таймере. Если угловая скорость выше этого предела в течение заданного перед полётом времени, выдаём сигнал "авария" и двигатель второй ступени не запускаем.
Плавный уход от вертикали игнорируем. Игнорируем и кратковременные болтания туда-сюда из-за сдвига ветра (а это часто встречающаяся штука).
Конечно, в силу простоты, у этой штуки будут как ложные срабатывания, так и пропуски. Но на 80% достоверность её вывести можно. И она будет куда менее капризной, чем полноценный аналоговый интегратор.
mihail66> Цепочка задающих резисторов высокоомная 2,2М, греться и плыть не должна.
она и плывёт - см. опыты Xan-а.
mihail66> Может ли операционник (компаратор) так "гулять"? (LM358)
mihail66> Коэффициент усиления 14000, частота среза 0,1Гц.
с учётом коэффициента усиления 14000 - стабильности резисторов недостаточно.
P.S. первая цепь, амплитудный селектор, фактически должна состоять из двух половин - одна на плюс угловой скорости, другая - на минус. И, понятно, таких комплектов нужно два - на X и Y.
И всё это, возможно, окажется проще реализовать в цифре, но в аналоге самый простой способ - именно такой.
Аналоговый гироскоп, но на выходе у него - не полноценный интегратор, а две пороговые цепи. Одна, первая, пороговая по амплитуде - что угловая скорость превысила некий предел. Другая - пороговая по времени, например, на 555 таймере. Если угловая скорость выше этого предела в течение заданного перед полётом времени, выдаём сигнал "авария" и двигатель второй ступени не запускаем.
Плавный уход от вертикали игнорируем. Игнорируем и кратковременные болтания туда-сюда из-за сдвига ветра (а это часто встречающаяся штука).
Конечно, в силу простоты, у этой штуки будут как ложные срабатывания, так и пропуски. Но на 80% достоверность её вывести можно. И она будет куда менее капризной, чем полноценный аналоговый интегратор.
mihail66> Цепочка задающих резисторов высокоомная 2,2М, греться и плыть не должна.
она и плывёт - см. опыты Xan-а.
mihail66> Может ли операционник (компаратор) так "гулять"? (LM358)
mihail66> Коэффициент усиления 14000, частота среза 0,1Гц.
с учётом коэффициента усиления 14000 - стабильности резисторов недостаточно.
P.S. первая цепь, амплитудный селектор, фактически должна состоять из двух половин - одна на плюс угловой скорости, другая - на минус. И, понятно, таких комплектов нужно два - на X и Y.
И всё это, возможно, окажется проще реализовать в цифре, но в аналоге самый простой способ - именно такой.
Б.г.> И всё это, возможно, окажется проще реализовать в цифре, но в аналоге самый простой способ - именно такой.
Спасибо Б.г., была очень полезная беседа.
Где-бы аналоговый гироскоп зацепить?
"Цифру" сейчас племянник осваивает.
От "блуда" компараторов избавился.
Оказалось не цепочка резисторов плыла.
Заменил ОУ.
Поставил пару компараторов LM211 с высоким входным.
Теперь не "дрейфит".
Всем удачных телодвижений!
Спасибо Б.г., была очень полезная беседа.
Где-бы аналоговый гироскоп зацепить?
"Цифру" сейчас племянник осваивает.
От "блуда" компараторов избавился.
Оказалось не цепочка резисторов плыла.
Заменил ОУ.
Поставил пару компараторов LM211 с высоким входным.
Теперь не "дрейфит".
Всем удачных телодвижений!
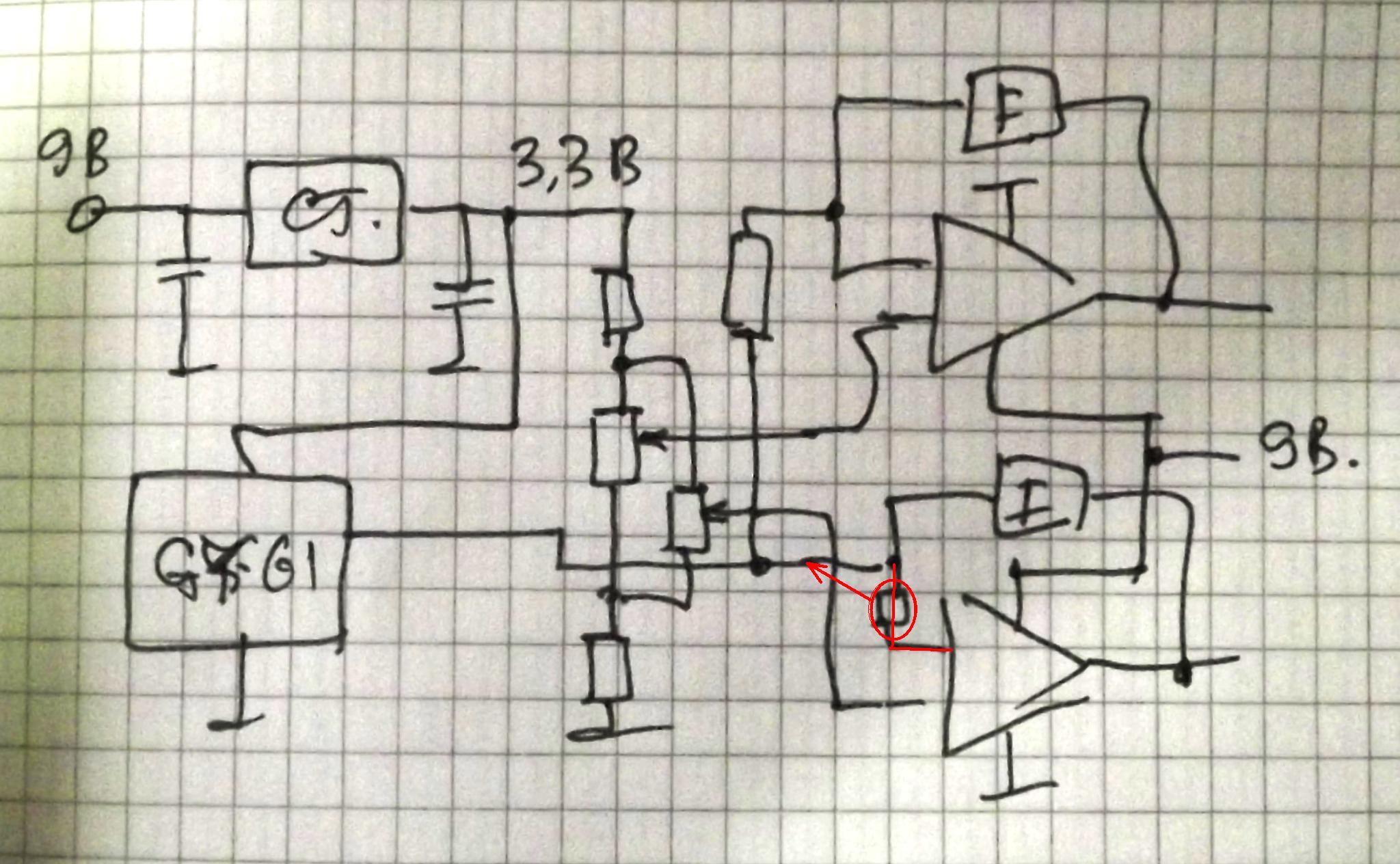
mihail66> От "блуда" компараторов избавился.
mihail66> Оказалось не цепочка резисторов плыла.
mihail66> Заменил ОУ.
mihail66> Поставил пару компараторов LM211 с высоким входным.
Кто мешал сразу подключить ОУ в режиме компаратора?")
Объясню, что у тебя на самом деле было. Ты соединил цепи обратной связи обоих усилителей друг с другом, и они боролись за право компенсировать входной сигнал. Не надо так делать.
Вообще, лично я бы поставил два компаратора и уже на выход компараторов — фильтр и триггер Шмитта.
И ещё, 2МОм для задающей цепочки — на мой вкус, многовато. Как бы она не стала по совместительству радиоприёмником работать Да и шум с платы собирать будет. ИМХО 10..20К в самый раз.
mihail66> Всем удачных телодвижений!
mihail66> Оказалось не цепочка резисторов плыла.
mihail66> Заменил ОУ.
mihail66> Поставил пару компараторов LM211 с высоким входным.
Кто мешал сразу подключить ОУ в режиме компаратора?
")
Объясню, что у тебя на самом деле было. Ты соединил цепи обратной связи обоих усилителей друг с другом, и они боролись за право компенсировать входной сигнал. Не надо так делать.
Вообще, лично я бы поставил два компаратора и уже на выход компараторов — фильтр и триггер Шмитта.
И ещё, 2МОм для задающей цепочки — на мой вкус, многовато. Как бы она не стала по совместительству радиоприёмником работать
Да и шум с платы собирать будет. ИМХО 10..20К в самый раз.mihail66> Всем удачных телодвижений!


mihail66> там принцип простой - опорное напряжение и два компаратора с фильтрами фиксирующие ускорения,
У тебя схема с ошибками, так не делают.
У тебя схема с ошибками, так не делают.
Sandro> Вообще, лично я бы поставил два компаратора и уже на выход компараторов — фильтр и триггер Шмитта.
Спасибо за рекомендации, уже все разобрал.
Это схема как пример, у компараторов до кучи стоит ПОС с ФВЧ от дребезга.
По входам сейчас хочу растащить и ФНЧ из ОС перенести на вход, выход компараторов работает уже на D-триггер.
Спасибо за рекомендации, уже все разобрал.
Это схема как пример, у компараторов до кучи стоит ПОС с ФВЧ от дребезга.
По входам сейчас хочу растащить и ФНЧ из ОС перенести на вход, выход компараторов работает уже на D-триггер.
irfps> У тебя схема с ошибками, так не делают.
А где?, может чего не углядел.
А где?, может чего не углядел.
irfps>> У тебя схема с ошибками, так не делают.
mihail66> А где?, может чего не углядел.
Ну, как минимум, резистор не там нарисован. Как спаяно - не знаю.
mihail66> А где?, может чего не углядел.
Ну, как минимум, резистор не там нарисован. Как спаяно - не знаю.
Прикреплённые файлы:
Б.г.> Ну, как минимум, резистор не там нарисован. Как спаяно - не знаю.
Ааа, спасибо.
Ошибка осталась только на бумаге.
Ааа, спасибо.
Ошибка осталась только на бумаге.

Plant
новичок
SashaMaks> Я ни разу в вашем проекте не видел хотя бы вот этого:
SashaMaks> https://www.youtube.com/watch?v=PJ_eLAz082M
SashaMaks> , где было бы наглядно видно, что матмодель адекватная и на её основе можно строить СУ.
Прошу прошения, какой софт использовался для этой симуляции ? Какой можно ещё использовать ?
SashaMaks> https://www.youtube.com/watch?v=PJ_eLAz082M
SashaMaks> , где было бы наглядно видно, что матмодель адекватная и на её основе можно строить СУ.
Прошу прошения, какой софт использовался для этой симуляции ? Какой можно ещё использовать ?
Plant> Прошу прошения, какой софт использовался для этой симуляции ? Какой можно ещё использовать ?
Плата вот эта:
Программа самописная на ПК для ПК и для МК.
Плата вот эта:
Программа самописная на ПК для ПК и для МК.
Plant
новичок
Ок, спасибо...
Планруется релиз самописного ПО для ПК ?
Есть другие варианты ПО для ПК?
Планруется релиз самописного ПО для ПК ?
Есть другие варианты ПО для ПК?
Plant> Не нашёл, какой софт использовался для этой симуляции ? Какой ещё можно использовать ?
Софт мой, и он пока ещё не готов.
А какой ещё можно использовать, я не знаю, рабочих примеров в открытом доступе не видел.
Софт мой, и он пока ещё не готов.
А какой ещё можно использовать, я не знаю, рабочих примеров в открытом доступе не видел.
Plant
новичок
SashaMaks> https://www.youtube.com/watch?v=ukMbdVfqp28
В этой симуляции какое ПО использовалось ? Не могу найти...
Вообще интересует "скормить" в ПО лог акселерометра и гироскопа после полёта и получить визуализацию положения ракеты по траектории движения.
Не подскажете, куда копать ?
В этой симуляции какое ПО использовалось ? Не могу найти...
Вообще интересует "скормить" в ПО лог акселерометра и гироскопа после полёта и получить визуализацию положения ракеты по траектории движения.
Не подскажете, куда копать ?
SashaMaks>>> Пример 2:
SashaMaks>> Пример 3:
SashaMaks> Пример №4:
Пример №5:
 http://files.balancer.ru/cache/forums/attaches/2020/05/800x600/27-8682741-raketa-apakhom.png [can't get icon's size]
http://files.balancer.ru/cache/forums/attaches/2020/05/800x600/27-8682741-raketa-apakhom.png [can't get icon's size]
SashaMaks>> Пример 3:
SashaMaks> Пример №4:
Пример №5:
Обсуждение испытаний и пусков ракет [SashaMaks#27.05.20 13:53]
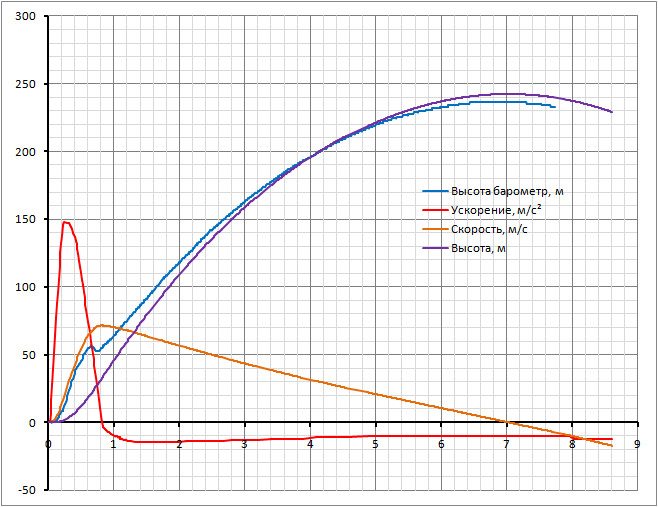
… Если взять правильную кривую из 4-х предложенных с акселерометра, то всё замечательно получается без 0,35 и прочего бреда. П.С. Даже несмотря на страшно большое отклонение полёта ракеты от вертикали в 20° // Ракетомодельный
По поводу определения ориентации ракеты с помощью акселерометров. Если взять в качестве модели ракеты прямой отрезок, и поставить два трёхосевых акселератора в концах отрезка, то, интегрируя ускорения, можно получить трёхмерные координаты, из которых вычислить ориентацию отрезка в пространстве. Понятно, что в теории. Вопрос - насколько можно этот подход реализовать на практике? Хватает ли точности акселерометров - и, может быть, жёсткости ракеты? Или гироскопы всё же гораздо проще?

avmich> и поставить два трёхосевых акселератора в концах отрезка
Проще использовать гиры.
И арифметика чуть проще, и точность выше.
Времена, когда в ракете одноосный акселерометр считался шиком, давно прошли.
Электроника подешевела и получшела уже достаточно, чтоб не париться "экономичными" вариантами.
Надо делать полный.
Проще использовать гиры.
И арифметика чуть проще, и точность выше.
Времена, когда в ракете одноосный акселерометр считался шиком, давно прошли.
Электроника подешевела и получшела уже достаточно, чтоб не париться "экономичными" вариантами.
Надо делать полный.
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
 Evgenij
Evgenij

avmich> По поводу определения ориентации ракеты с помощью акселерометров.
В чем полезность определения ориентации наших ракеток? Если говорить просто про определение их координат, то да. А для коррекции этого положения ракеты в полете разве ваши акселерометры пригодны? Сигнал коррекции должен быть немедленно исполнен какими то рулевыми органами. Их на наших ракетках нет. Время полета - единицы секунд, тогда реакция на коррекцию траектории должна быть в долях этих секунд или миллисекунд. Да сигнал должен быть обработан хорошим процессором. Скорее всего, это разговоры про далекое будущее. ТАУ - сложный предмет ...
В чем полезность определения ориентации наших ракеток? Если говорить просто про определение их координат, то да. А для коррекции этого положения ракеты в полете разве ваши акселерометры пригодны? Сигнал коррекции должен быть немедленно исполнен какими то рулевыми органами. Их на наших ракетках нет. Время полета - единицы секунд, тогда реакция на коррекцию траектории должна быть в долях этих секунд или миллисекунд. Да сигнал должен быть обработан хорошим процессором. Скорее всего, это разговоры про далекое будущее. ТАУ - сложный предмет ...
Copyright © Balancer 1997..2025
Создано 26.06.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 26.06.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}