 apakhom
apakhom
 инфо
инфо инструменты
инструменты
 pinko
pinko

 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/3d/3dnews/assets/external/illustrations/2010/10/13/600098/128x128-crop/mems-accelerometer-2-big.jpg)
Использование микроэлектромеханических (MEMS) акселерометров в ракетомоделях
Теги:

SashaMaks> Коэффициенты А и В в том файле, что я скинул, находящиеся в ячейках С1 и С2 - это калибровочные коэффициенты твоего устройства, они с ним теперь навсегда. Их нельзя взять и просто так поменять, и они в данном расчёте нужны только для того, чтобы откатить применённую калибровку и применить калибровку из даташита.
Это я понял, конечно")
Имел ввиду А и В уже потом, когда из "сырых" данных из регистров ADXL375 (x) делаем "привычные" м/с2 или g: то что в g = (x+B)/A
И еще вопрос/мнение: может, все-таки, не одну ось брать? а как и предлагает pinko - "все вместе" (корень из суммы квадратов по всем осям)?
Это я понял, конечно
")
Имел ввиду А и В уже потом, когда из "сырых" данных из регистров ADXL375 (x) делаем "привычные" м/с2 или g: то что в g = (x+B)/A
И еще вопрос/мнение: может, все-таки, не одну ось брать? а как и предлагает pinko - "все вместе" (корень из суммы квадратов по всем осям)?


apakhom> Имел ввиду А и В уже потом, когда из "сырых" данных из регистров ADXL375 (x) делаем "привычные" м/с2 или g: то что в g = (x+B)/A
Так их и надо получать опытным путём в результате калибровке, т.е. если ты хочешь точнее это знать, тебе надо самому тогда калибровать датчик, а не придумывать, как оно будет.
apakhom> И еще вопрос/мнение: может, все-таки, не одну ось брать? а как и предлагает pinko - "все вместе" (корень из суммы квадратов по всем осям)?
Ну попробуй, интересно, как ты реализуешь при этом на лету анализ перехода значений через 0.
Под углом в многоосевом акселерометре можно расширить диапазон измерений.
Так, если повернуть его только в одной плоскости, то можно суммировать показания по X и Y, тогда диапазон измерений расширяется в 1,414 раз, а при повороте в двух плоскостях, то со всех трёх осей до 1,732 раза или же вместо ±16G можно вытянуть ±22,6G и ±27,7G соответственно.
Так их и надо получать опытным путём в результате калибровке, т.е. если ты хочешь точнее это знать, тебе надо самому тогда калибровать датчик, а не придумывать, как оно будет.
apakhom> И еще вопрос/мнение: может, все-таки, не одну ось брать? а как и предлагает pinko - "все вместе" (корень из суммы квадратов по всем осям)?
Ну попробуй, интересно, как ты реализуешь при этом на лету анализ перехода значений через 0.
Под углом в многоосевом акселерометре можно расширить диапазон измерений.
Так, если повернуть его только в одной плоскости, то можно суммировать показания по X и Y, тогда диапазон измерений расширяется в 1,414 раз, а при повороте в двух плоскостях, то со всех трёх осей до 1,732 раза или же вместо ±16G можно вытянуть ±22,6G и ±27,7G соответственно.

- Xan [21.10.2020 12:18]: Перенос сообщений из Обсуждение испытаний и пусков ракет
- Xan [21.10.2020 12:23]: Перенос сообщений в Заповедник гоблинов

SashaMaks> Ну попробуй, интересно, как ты реализуешь при этом на лету анализ перехода значений через 0.
Можно уточнить, в чем именно проблема?
Вектор силы тяжести и вектор тяги всегда будут разбираться в трех направлениях относительно собственных осей датчика. То есть квадратный корень из суммы их квадратов должен дать реальное ускорение - надо исправлит с 1g и сдвинут за счет ускорение центробежных сил.
Можно конечно рассчитать сколько есть тангенциального ускорения на скорости 300 м/с и параболической траектории и посмотреть стоит ли это упоминать.
Можно уточнить, в чем именно проблема?
Вектор силы тяжести и вектор тяги всегда будут разбираться в трех направлениях относительно собственных осей датчика. То есть квадратный корень из суммы их квадратов должен дать реальное ускорение - надо исправлит с 1g и сдвинут за счет ускорение центробежных сил.
Можно конечно рассчитать сколько есть тангенциального ускорения на скорости 300 м/с и параболической траектории и посмотреть стоит ли это упоминать.

pinko> Можно уточнить, в чем именно проблема?
Проблема в этой функции:
pinko> То есть квадратный корень из суммы их квадратов должен дать реальное ускорение
Она всегда больше или равна 0.
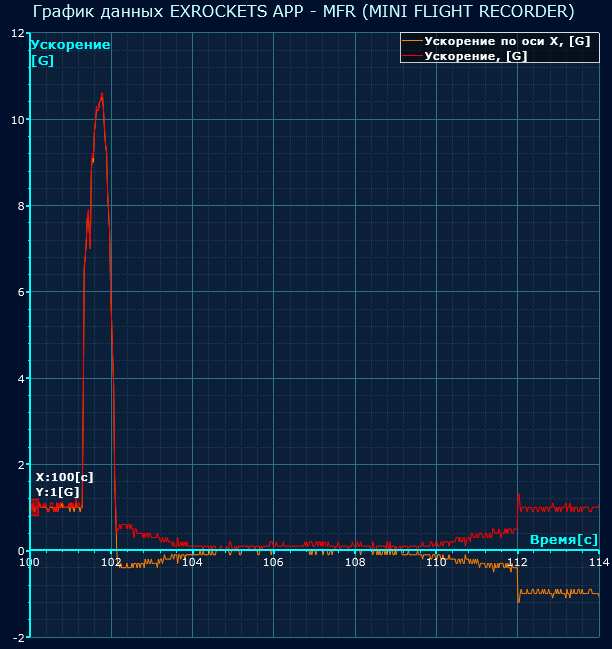
И вот как это выглядит уже в реальных данных:
Проблема в этой функции:
pinko> То есть квадратный корень из суммы их квадратов должен дать реальное ускорение
Она всегда больше или равна 0.
И вот как это выглядит уже в реальных данных:
Прикреплённые файлы:
pinko>> Можно уточнить, в чем именно проблема?
SashaMaks> Проблема в этой функции:
pinko>> То есть квадратный корень из суммы их квадратов должен дать реальное ускорение
SashaMaks> Она всегда больше или равна 0.
Это действительно так, поэтому необходимо провести простой анализ траектории") - чтобы знать где инвертировать ускорение:
- чтобы знать где инвертировать ускорение:
Перед стартом --> 1g
Двигатель работает --> больше, чем 1g и увеличивает
Мотор сгорел --> как только ускорение упадет ниже от 0 до 1 g - необходимо поменять знак на отрицательный
Конечно, необходимы логические маркеры - например, третья фаза не может быть запущена раньше второй фазы...
SashaMaks> Проблема в этой функции:
pinko>> То есть квадратный корень из суммы их квадратов должен дать реальное ускорение
SashaMaks> Она всегда больше или равна 0.
Это действительно так, поэтому необходимо провести простой анализ траектории
") - чтобы знать где инвертировать ускорение:
- чтобы знать где инвертировать ускорение:Перед стартом --> 1g
Двигатель работает --> больше, чем 1g и увеличивает
Мотор сгорел --> как только ускорение упадет ниже от 0 до 1 g - необходимо поменять знак на отрицательный
Конечно, необходимы логические маркеры - например, третья фаза не может быть запущена раньше второй фазы...
pinko> Перед стартом --> 1g
pinko> Двигатель работает --> больше, чем 1g и увеличивает
pinko> Мотор сгорел --> как только ускорение упадет ниже от 0 до 1 g - необходимо поменять знак на отрицательный
pinko> Конечно, необходимы логические маркеры - например, третья фаза не может быть запущена раньше второй фазы...
Хотел посмотреть, что будет, если посчитать от модуля A, знак учитывал по данным с оси X, вот что получилось для этого пуска (Запуски ракет и испытания [apakhom#03.10.20 19:52]:
1. высота H'a оказалась ниже всех, и задержка по времени меньше.
2. скорость V'a 312м/с максимум, но почти не отличается от V'ax в апогее.
3. скорость V'a убывает быстрее, чем V'ax в пассивной фазе полёта - вероятно имеет место некоторый перекос осей датчика и осей ракеты.
Тут учёт осей Y и Z даёт возможность нивелировать угловые неточности при сопряжении осей датчика и ракеты.
П.С. Для себя так и думал, что буду использовать пару MPU6250 с раcширением оси X по диапазону тензодатчиком и его калибровкой в полёте данными с MPU6250...
pinko> Двигатель работает --> больше, чем 1g и увеличивает
pinko> Мотор сгорел --> как только ускорение упадет ниже от 0 до 1 g - необходимо поменять знак на отрицательный
pinko> Конечно, необходимы логические маркеры - например, третья фаза не может быть запущена раньше второй фазы...
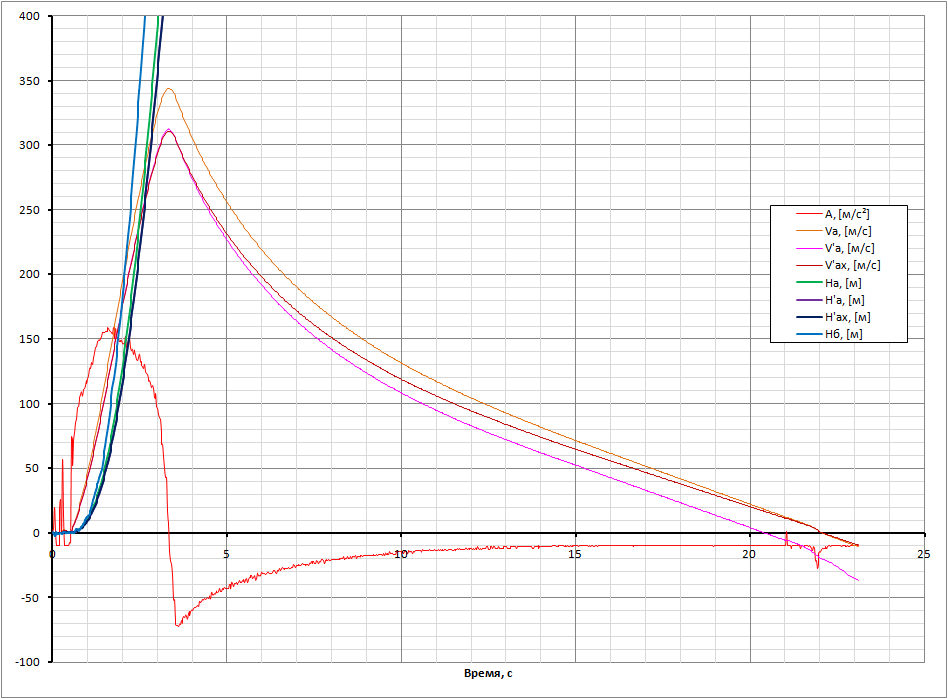
Хотел посмотреть, что будет, если посчитать от модуля A, знак учитывал по данным с оси X, вот что получилось для этого пуска (Запуски ракет и испытания [apakhom#03.10.20 19:52]:
1. высота H'a оказалась ниже всех, и задержка по времени меньше.
2. скорость V'a 312м/с максимум, но почти не отличается от V'ax в апогее.
3. скорость V'a убывает быстрее, чем V'ax в пассивной фазе полёта - вероятно имеет место некоторый перекос осей датчика и осей ракеты.
Тут учёт осей Y и Z даёт возможность нивелировать угловые неточности при сопряжении осей датчика и ракеты.
П.С. Для себя так и думал, что буду использовать пару MPU6250 с раcширением оси X по диапазону тензодатчиком и его калибровкой в полёте данными с MPU6250...
Прикреплённые файлы:
SashaMaks> Хотел посмотреть, что будет, если посчитать от модуля A, знак учитывал по данным с оси X, вот что получилось для этого пуска (Запуски ракет и испытания [apakhom#03.10.20 19:52]:
Скорости: почти сверхзвук...
Скорости: почти сверхзвук...
Прикреплённые файлы:
SashaMaks>> Хотел посмотреть, что будет, если посчитать от модуля A, знак учитывал по данным с оси X, вот что получилось для этого пуска (Запуски ракет и испытания [apakhom#03.10.20 19:52]:
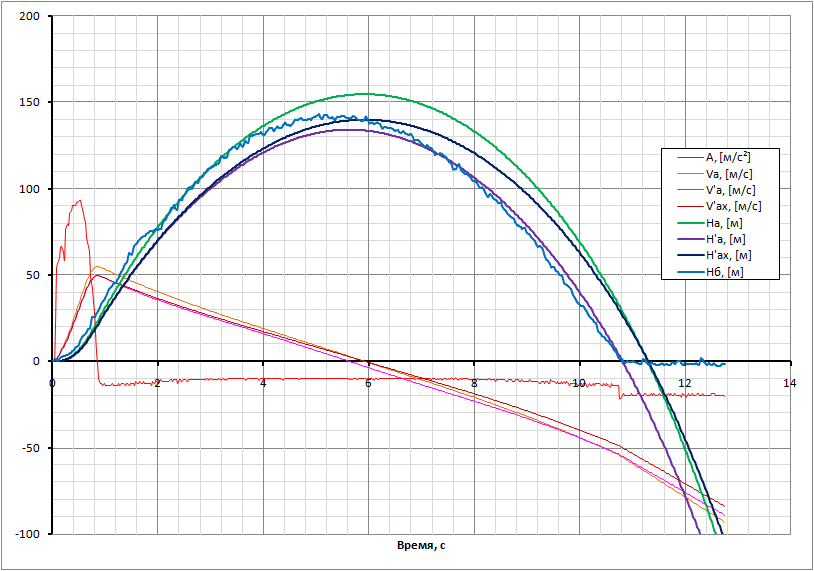
И тоже самое для (Запуски ракет и испытания [apakhom#17.10.20 22:13]:
И тоже самое для (Запуски ракет и испытания [apakhom#17.10.20 22:13]:
Прикреплённые файлы:
- Xan [26.10.2020 09:13]: Перенос сообщений в Электронное оборудование ракет - БРЭО 2020
В выходные развлекал детишек запуском "забавной" РП-18.
Положил туда MFR с целью еще раз посмотреть "что там ускорение покажет", а точнее - как калибровочные коэффициенты ADXL375 влияют на картинку полета.
Петарда снова не сработала , но это нам даже лучше - картинка получается такая же "красивая" как и в 43-ем запуске
, но это нам даже лучше - картинка получается такая же "красивая" как и в 43-ем запуске
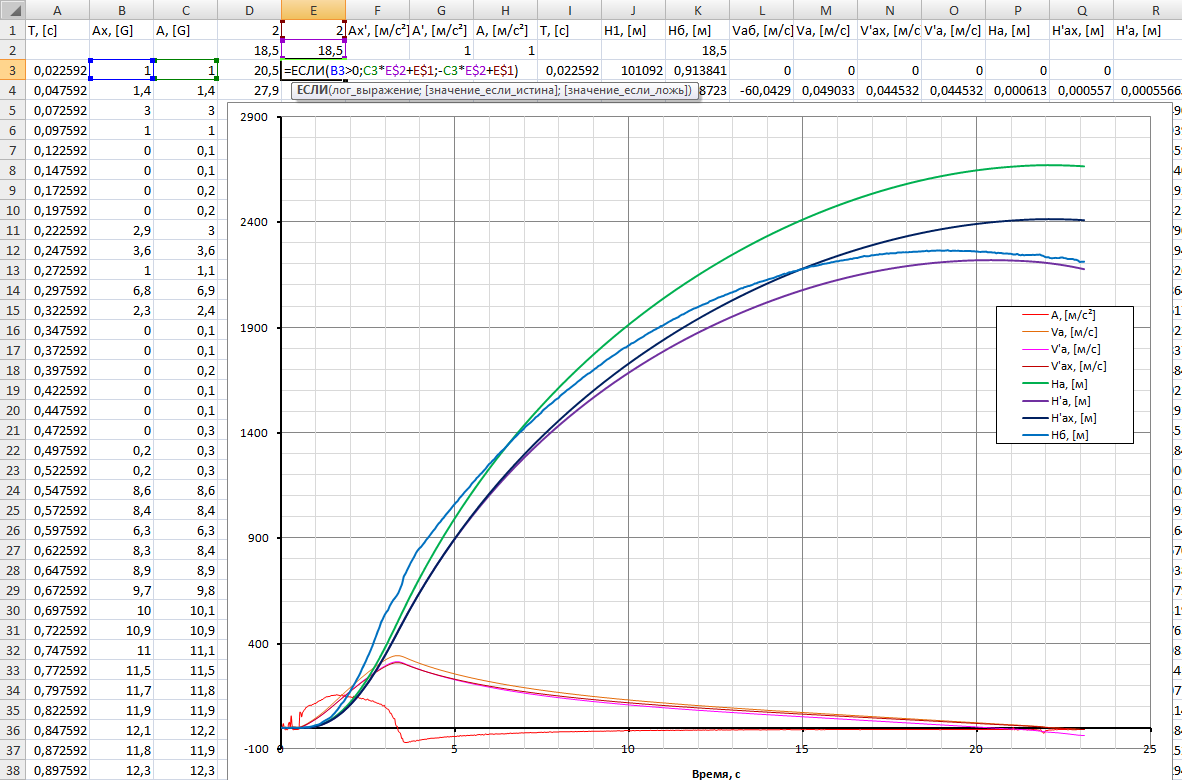
Как распоряжался данными: сначала вернул ускорение к "сырому" виду (убрал Ах(18,5) и Вх(2)). Затем подставил среднее Ах из даташита (20,5) и "поиграл" с Вх. Ниже картинки для разных Вх



Скорость по акселерометру (голубая) всегда хороша в сравнении с "барометрической" (желтый).
Высота по акселерометру (зеленый) более зависима от Вх и "не всегда" совпадает с "барометрической" (синий).
Выходит, что "если долго мучится" с калибровкой, можно получить весьма адекватные результаты.
(брал только значения по одной оси
PS если кому интересно "поковыряться", Excel файл прилагаю.
Положил туда MFR с целью еще раз посмотреть "что там ускорение покажет", а точнее - как калибровочные коэффициенты ADXL375 влияют на картинку полета.
Петарда снова не сработала
 , но это нам даже лучше - картинка получается такая же "красивая" как и в 43-ем запуске
, но это нам даже лучше - картинка получается такая же "красивая" как и в 43-ем запуске Как распоряжался данными: сначала вернул ускорение к "сырому" виду (убрал Ах(18,5) и Вх(2)). Затем подставил среднее Ах из даташита (20,5) и "поиграл" с Вх. Ниже картинки для разных Вх



Скорость по акселерометру (голубая) всегда хороша в сравнении с "барометрической" (желтый).
Высота по акселерометру (зеленый) более зависима от Вх и "не всегда" совпадает с "барометрической" (синий).
Выходит, что "если долго мучится" с калибровкой, можно получить весьма адекватные результаты.
(брал только значения по одной оси
PS если кому интересно "поковыряться", Excel файл прилагаю.
Прикреплённые файлы:
rp18-44mfrscr2.xls (скачать)
[172 кБ]

AD22281 одноосевой аналоговый акселерометр 70g, или AD22282-А-R2 120g, и другие.

Страница товара не существует | 404 | AliExpress
Страница товара не существует | 404 | AliExpress // aliexpress.ru
(Запуски ракет и испытания [Брат-2#18.08.21 22:14])
Ужасно неточный акселерометр с печально огромным дрейфом нулевого значения, шумный и неточный из-за центробежного ускорения, а под наклоном так вообще караул!
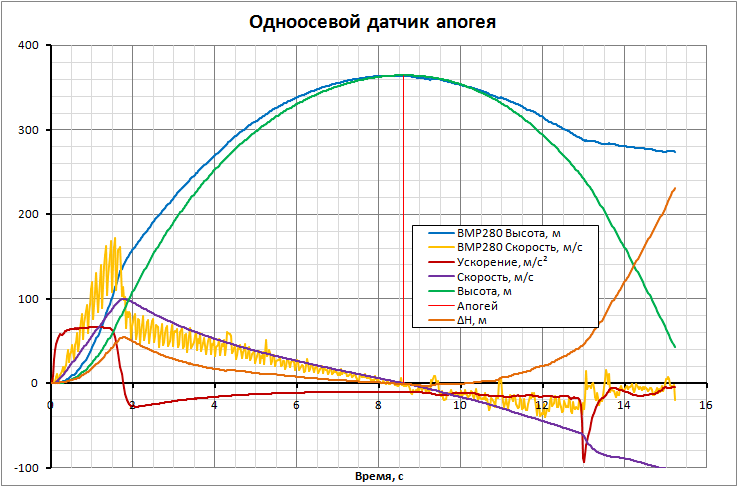
Итог данного полёта следующий:
1. На активном участке полёта высота полёта ракеты по датчику BMP280 завышена на (30...60)%;
2. На активном участке полёта скорость полёта ракеты по датчику BMP280 завышена на (35...40)%;
Так наглядно выглядит эффект эжекции - как главной и весьма значительной составляющей погрешности измерения высоты полёта ракеты в динамике при помощи БАРОМЕТРИЧЕСКОГО датчика.
Апогей по акселерометру определяется точно, если к акселерометру выполняется минимальный перечень технических требований, как и к барометрическим датчикам. Это:
1. Установка акселерометра в жесткой связке с корпусом (электроника не болтается внутри отсека);
2. Вектор оси акселерометра всегда совпадает с главной осью вращения корпуса ракеты;
3. Данные записываются полностью и без пропусков и без задержек;
4. Нет зашкаливания датчика;
5. Правильно выполненная калибровка (влияет только на точность вычисления высоты);
6. Точное время между измерениями (влияет только на точность вычисления высоты).
По п.6 в данном примере вероятно была использована фиксированная частота опроса датчиков в 40Гц, по факту получилось где-то 37,6Гц. Если калибровка точная, то имеет место перегрузка контроллера вычислениями. Поэтому лучше записывать и число тактов ЦП между опросами датчиков...
Всё это не является какими-то непреодолимыми физическими сложностями работы одноосевого акселерометра, как датчика апогея. Было бы желание...
Ужасно неточный акселерометр с печально огромным дрейфом нулевого значения, шумный и неточный из-за центробежного ускорения, а под наклоном так вообще караул!

Итог данного полёта следующий:
1. На активном участке полёта высота полёта ракеты по датчику BMP280 завышена на (30...60)%;
2. На активном участке полёта скорость полёта ракеты по датчику BMP280 завышена на (35...40)%;
Так наглядно выглядит эффект эжекции - как главной и весьма значительной составляющей погрешности измерения высоты полёта ракеты в динамике при помощи БАРОМЕТРИЧЕСКОГО датчика.
Апогей по акселерометру определяется точно, если к акселерометру выполняется минимальный перечень технических требований, как и к барометрическим датчикам. Это:
1. Установка акселерометра в жесткой связке с корпусом (электроника не болтается внутри отсека);
2. Вектор оси акселерометра всегда совпадает с главной осью вращения корпуса ракеты;
3. Данные записываются полностью и без пропусков и без задержек;
4. Нет зашкаливания датчика;
5. Правильно выполненная калибровка (влияет только на точность вычисления высоты);
6. Точное время между измерениями (влияет только на точность вычисления высоты).
По п.6 в данном примере вероятно была использована фиксированная частота опроса датчиков в 40Гц, по факту получилось где-то 37,6Гц. Если калибровка точная, то имеет место перегрузка контроллера вычислениями. Поэтому лучше записывать и число тактов ЦП между опросами датчиков...
Всё это не является какими-то непреодолимыми физическими сложностями работы одноосевого акселерометра, как датчика апогея. Было бы желание...
Прикреплённые файлы:
(Использование микроэлектромеханических (MEMS) акселерометров в ракетомоделях [pinko#05.10.16 13:36])
pinko> - сделай прототип
pinko> - сделай несколько тестов вместе с надежным бортовыми компьютероми
pinko> - покажи установку и результаты
pinko> - докажи что всем ошибается, а ты прав
Даже лучше с научной точки: доказательства построены на разных БРЭО, разных людей, а итог один и он воспроизводится у всех:
SashaMaks>>>> Пример 2:
SashaMaks> SashaMaks>> Пример 3:
SashaMaks>> Пример №4:
SashaMaks> Пример №5:
Пример №6:
(Запуски ракет и испытания [Брат-2#29.09.22 19:03])
Данные: (http://www.wrk.ru/forums/attachment.php?item=1800957)
Одноосевой акселерометр работает отлично!
И это всё уже давно не теоретическая модель, а практические данные.
pinko> - сделай прототип
pinko> - сделай несколько тестов вместе с надежным бортовыми компьютероми
pinko> - покажи установку и результаты
pinko> - докажи что всем ошибается, а ты прав
Даже лучше с научной точки: доказательства построены на разных БРЭО, разных людей, а итог один и он воспроизводится у всех:
SashaMaks>>>> Пример 2:
SashaMaks> SashaMaks>> Пример 3:
SashaMaks>> Пример №4:
SashaMaks> Пример №5:
Пример №6:
(Запуски ракет и испытания [Брат-2#29.09.22 19:03])
Данные: (http://www.wrk.ru/forums/attachment.php?item=1800957)
Одноосевой акселерометр работает отлично!
И это всё уже давно не теоретическая модель, а практические данные.
Прикреплённые файлы:
SashaMaks> Одноосевой акселерометр работает отлично!
SashaMaks> И это всё уже давно не теоретическая модель, а практические данные.
Вот еще один молодец, у которого все работает. Но работает оно только до поры до времени, и при первой же нештатке такая ССР сразу пойдет в отказ.
SashaMaks> И это всё уже давно не теоретическая модель, а практические данные.
Вот еще один молодец, у которого все работает. Но работает оно только до поры до времени, и при первой же нештатке такая ССР сразу пойдет в отказ.
SashaMaks> Одноосевой акселерометр работает отлично!
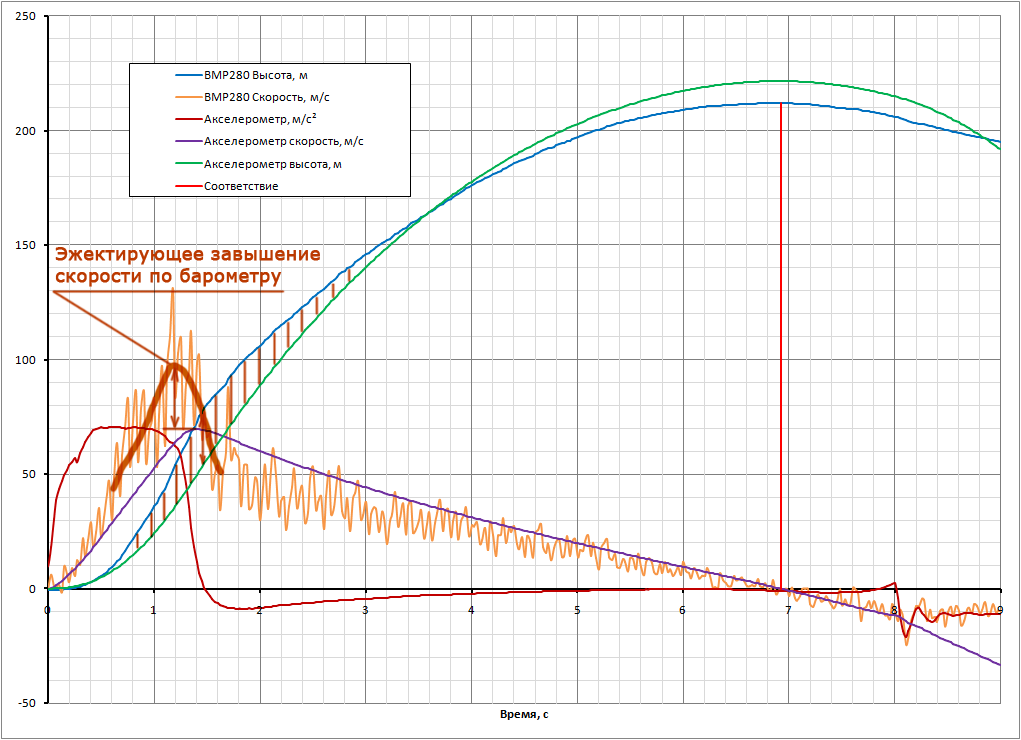
1. Калибровал данные с датчика BMP280 по показаниям о максимальной высоте в 212м;
2. Калибровал данные с акселерометра на старте 1G;
3. Допустил, что было задано 40 измерений в сек.
В итоге всё тоже самое, высота прекрасно совпадает, а на скорости у BMP280 идёт заметное завышение в скоростном апогее из-за эжектирующего эффекта:
1. Калибровал данные с датчика BMP280 по показаниям о максимальной высоте в 212м;
2. Калибровал данные с акселерометра на старте 1G;
3. Допустил, что было задано 40 измерений в сек.
В итоге всё тоже самое, высота прекрасно совпадает, а на скорости у BMP280 идёт заметное завышение в скоростном апогее из-за эжектирующего эффекта:
Прикреплённые файлы:
Mihail66> Но работает оно только до поры до времени, и при первой же нештатке такая ССР сразу пойдет в отказ.
Можно конкретный пример из практики?
Можно конкретный пример из практики?
SashaMaks> Можно конкретный пример из практики?
А нужно?
У меня был всего один такой запуск. Причем работа ССР по акселерометру дублировалась барометром. Полет прошел относительно штатно. И этим запуском я подтвердил, что с помошью акселерометра можно определять апогей, но это вовсе не означает, что это нужно делать. Представить себе картину поведения акселерометра при нештатном полете очень просто. И если случится авария двигателя, прогар или пробой с разрушением, то акселерометр отработать ССР уже не сможет. Это очевидно.
А нужно?
У меня был всего один такой запуск. Причем работа ССР по акселерометру дублировалась барометром. Полет прошел относительно штатно. И этим запуском я подтвердил, что с помошью акселерометра можно определять апогей, но это вовсе не означает, что это нужно делать. Представить себе картину поведения акселерометра при нештатном полете очень просто. И если случится авария двигателя, прогар или пробой с разрушением, то акселерометр отработать ССР уже не сможет. Это очевидно.
SashaMaks> В итоге всё тоже самое, высота прекрасно совпадает, а на скорости у BMP280 идёт заметное завышение в скоростном апогее из-за эжектирующего эффекта:
А вот скажи, нахрена ты все время заостряешь внимание на этом эжектирующем завышении (как на картинке)? В апогее совсем другие условия. Я тебе даже больше скажу, на том же участке, который ты так красиво отрисовал, на транзвуке наоборот будет занижение. Но это никак не отражается на качестве работы барометра в апогее.
А вот скажи, нахрена ты все время заостряешь внимание на этом эжектирующем завышении (как на картинке)? В апогее совсем другие условия. Я тебе даже больше скажу, на том же участке, который ты так красиво отрисовал, на транзвуке наоборот будет занижение. Но это никак не отражается на качестве работы барометра в апогее.

Mihail66> А вот скажи, нахрена ....
Здесь еще есть один нюанс, обрабатываются не сырые данные, а после фильтров ( внутренних блочных, дополнительных внешних), а как известно, любой тип фильтра работает по уже свершившимся событиям, то есть картинка опаздывает от фактических событий самой ракеты. Все это не критично, спасибо китайцам и за то, что мы имеем!
Здесь еще есть один нюанс, обрабатываются не сырые данные, а после фильтров ( внутренних блочных, дополнительных внешних), а как известно, любой тип фильтра работает по уже свершившимся событиям, то есть картинка опаздывает от фактических событий самой ракеты. Все это не критично, спасибо китайцам и за то, что мы имеем!

Брат-2> Здесь еще есть один нюанс, обрабатываются не сырые данные, а после фильтров ( внутренних блочных, дополнительных внешних), а как известно, любой тип фильтра работает по уже свершившимся событиям, то есть картинка опаздывает от фактических событий самой ракеты. Все это не критично, спасибо китайцам и за то, что мы имеем!
Ха, но если у тебя фильтрация так сильно портит картину своим запаздыванием, то ты можешь использовать вариант с акселерометром, который работает на опережение. Только нужно будет его включать непосредственно перед апогеем, а весь полет отслеживать по показаниям высоты от барометра.
Ха, но если у тебя фильтрация так сильно портит картину своим запаздыванием, то ты можешь использовать вариант с акселерометром, который работает на опережение. Только нужно будет его включать непосредственно перед апогеем, а весь полет отслеживать по показаниям высоты от барометра.
Mihail66> И если случится авария двигателя, прогар или пробой с разрушением, то акселерометр отработать ССР уже не сможет. Это очевидно.
Обнаружить такое поведение акселерометра программно не сложно. Это лишь вопрос кодинга.
Обнаружить такое поведение акселерометра программно не сложно. Это лишь вопрос кодинга.
Mihail66> А вот скажи, нахрена ты все время заостряешь внимание на этом эжектирующем завышении (как на картинке)?
Часто по показаниям барометра определяют скорость, которая может быть завышена до 1,5 раз, что легко может сделать полёт ракеты сверхзвуковым, а не дозвуковым, например. А это очень на многое влияет при тех же оценках прочности самой ракеты.
Часто по показаниям барометра определяют скорость, которая может быть завышена до 1,5 раз, что легко может сделать полёт ракеты сверхзвуковым, а не дозвуковым, например. А это очень на многое влияет при тех же оценках прочности самой ракеты.
SashaMaks> Обнаружить такое поведение акселерометра программно не сложно. Это лишь вопрос кодинга.
Значит этот акселерометр придется чем то дублировать, а чем?
А если дублировать барометром, то нахрен тогда этот акселерометр вообще там нужен, разве что скорость определять? А текущая скорость нам сильно важна?
Значит этот акселерометр придется чем то дублировать, а чем?
А если дублировать барометром, то нахрен тогда этот акселерометр вообще там нужен, разве что скорость определять? А текущая скорость нам сильно важна?
SashaMaks> Часто по показаниям барометра определяют скорость, которая может быть завышена до 1,5 раз...
А ты тут покажи хотя бы одного, кто эти значения скорости хоть как-то использует в полете.
А ты тут покажи хотя бы одного, кто эти значения скорости хоть как-то использует в полете.
Реклама Google — средство выживания форумов :)
SashaMaks>> Это лишь вопрос кодинга.
Mihail66> Значит этот акселерометр придется чем то дублировать, а чем?
Нет, моя фраза этого не значит, это Ваш вывод.
Mihail66> А если дублировать барометром, то нахрен тогда этот акселерометр вообще там нужен, разве что скорость определять?
Пока что, акселерометром дублируют барометр. Акселерометр в этом плане куда более самодостаточен.
Mihail66> А текущая скорость нам сильно важна?
Для многоступенчатых ракет этот параметр может очень хорошо определять потребный момент пуска последующих ступеней.
Mihail66> А ты тут покажи хотя бы одного, кто эти значения скорости хоть как-то использует в полете.
Ну когда-то в начале этой темы не было всех этих примеров по одноосевому акселерометру, сейчас Вы выдвинули новые требования, но их можно выдвигать бесконечно.
Главное не путать и не подменять своё нежелание что-то делать с мнимой невозможностью что-то сделать.
Mihail66> Значит этот акселерометр придется чем то дублировать, а чем?
Нет, моя фраза этого не значит, это Ваш вывод.
Mihail66> А если дублировать барометром, то нахрен тогда этот акселерометр вообще там нужен, разве что скорость определять?
Пока что, акселерометром дублируют барометр. Акселерометр в этом плане куда более самодостаточен.
Mihail66> А текущая скорость нам сильно важна?
Для многоступенчатых ракет этот параметр может очень хорошо определять потребный момент пуска последующих ступеней.
Mihail66> А ты тут покажи хотя бы одного, кто эти значения скорости хоть как-то использует в полете.
Ну когда-то в начале этой темы не было всех этих примеров по одноосевому акселерометру, сейчас Вы выдвинули новые требования, но их можно выдвигать бесконечно.
Главное не путать и не подменять своё нежелание что-то делать с мнимой невозможностью что-то сделать.
Copyright © Balancer 1997..2025
Создано 26.06.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 26.06.2015
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
