/web-man-with-radomes.jpg)
 Serg Ivanov
Serg Ivanov
 инфо
инфо инструменты
инструменты Полл
Полл

 Bredonosec
Bredonosec







 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
/web-man-with-radomes.jpg)
Спутниковое наведение ракет
ГСН на орбитеТеги:

Полл> Такая, как на Ту-95РЦ.
А теперь посчитай её разрешение") На дальности 300км оно километрами измеряется. Ничего не смущает?
На дальности 300км оно километрами измеряется. Ничего не смущает? ")
А теперь посчитай её разрешение
На дальности 300км оно километрами измеряется. Ничего не смущает?


S.I.> На дальности 300км оно километрами измеряется.
Системы работали. Как Ту-95РЦ, так и УС-А. Так что ты чего-то не понимаешь.
Системы работали. Как Ту-95РЦ, так и УС-А. Так что ты чего-то не понимаешь.

Полл> Системы работали. Как Ту-95РЦ, так и УС-А. Так что ты чего-то не понимаешь.
А ты объясни. Если можешь конечно..
А ты объясни.
Если можешь конечно..
S.I.> А ты объясни.
Так давай сюда свой расчет.
S.I.> Если можешь конечно..
Треуголку поправь - на глаза слезла.
Так давай сюда свой расчет.
S.I.> Если можешь конечно..
Треуголку поправь - на глаза слезла.
Полл> Треуголку поправь - на глаза слезла.
Не можешь - не морочь голову.
Не можешь - не морочь голову.
Полл>> Системы работали. Как Ту-95РЦ, так и УС-А. Так что ты чего-то не понимаешь.
S.I.> А ты объясни. Если можешь конечно..
Можно мне обьяснить?
спасибо.
Итак. Идея радара - в том, что мы посылаем луч некоей ширины и получаем его обратно. Направление, в котором мы его посылаем, нам известно (или тупо механический подвес антенны куда повернут, или фазовращатели куда повернули луч у ФАР-а). Ширина ДНА нам известна тоже
Итак, что получается, когда мы осматриваем море? Ответ слабый.
Что получается, если в нашу ДНА попадает корабль с его ЭПР в сотни квадратов? Ага, светится.
То есть, глубоко пофигу, что цель по размеру меньше (пусть даже в разы меньше) нашего разрешения. Она настолько контрастна, что весь сектор сильно отличается от прочих по ответу.
Далее, если захочется рассказать, что-де точного местоположения не выяснить -
Допустим, ширина ДНА 3 градуса.
Мы нашли, что при положении антенны в 24 градуса от курса самолета произошло опознание. Где конкретно цель?
Тонкой подстройкой проводим качание тарелкой от, допустим, 21 градуса до 27.
Предположим, что сигнал сильно слабел на границах 23.1 градуса и 26.1. Итог - можно с достаточной степенью уверенности говорить, что точный пеленг цели - 23.1+((26.1-23.1)/2)= 24.7.
При ширине ДНА 3 градуса. И якобы "невозможности" определить пеленг точнее.
Вопрос исчерпан?
S.I.> А ты объясни.
Если можешь конечно.. Можно мне обьяснить?
спасибо.
Итак. Идея радара - в том, что мы посылаем луч некоей ширины и получаем его обратно. Направление, в котором мы его посылаем, нам известно (или тупо механический подвес антенны куда повернут, или фазовращатели куда повернули луч у ФАР-а). Ширина ДНА нам известна тоже
Итак, что получается, когда мы осматриваем море? Ответ слабый.
Что получается, если в нашу ДНА попадает корабль с его ЭПР в сотни квадратов? Ага, светится.
То есть, глубоко пофигу, что цель по размеру меньше (пусть даже в разы меньше) нашего разрешения. Она настолько контрастна, что весь сектор сильно отличается от прочих по ответу.
Далее, если захочется рассказать, что-де точного местоположения не выяснить -
Допустим, ширина ДНА 3 градуса.
Мы нашли, что при положении антенны в 24 градуса от курса самолета произошло опознание. Где конкретно цель?
Тонкой подстройкой проводим качание тарелкой от, допустим, 21 градуса до 27.
Предположим, что сигнал сильно слабел на границах 23.1 градуса и 26.1. Итог - можно с достаточной степенью уверенности говорить, что точный пеленг цели - 23.1+((26.1-23.1)/2)= 24.7.
При ширине ДНА 3 градуса. И якобы "невозможности" определить пеленг точнее.
Вопрос исчерпан?
Voeneuch, учи физику, манажор ))

Bredonosec> Вопрос исчерпан?
Ты только что убил шанс, что Сергей найдет хотя бы вики-описание "основного уравнения радиолокации".
Материал из Википедии — свободной энциклопедии
Перейти к: навигация,
поиск
Основное уравнение радиолокации (англ. radar equation) — формула, описывающая дальность действия радиолокатора.
Содержание
…
// Дальше — ru.wikipedia.org
И обнаружит, что разрешающей способности в нем нет.
Как твоя прогулка - успешно?
Вернемся к нашим баранам - проблеме попадания в глиссаду авианосца на самолете со скоростью 200 км/ч и порывами ветра до 80 км/ч. Объясни, как это сделать?
Ты только что убил шанс, что Сергей найдет хотя бы вики-описание "основного уравнения радиолокации".
Основное уравнение радиолокации — Википедия
Основное уравнение радиолокацииМатериал из Википедии — свободной энциклопедии
Перейти к: навигация,
поиск
Основное уравнение радиолокации (англ. radar equation) — формула, описывающая дальность действия радиолокатора.
Содержание
…
// Дальше — ru.wikipedia.org
И обнаружит, что разрешающей способности в нем нет.
Как твоя прогулка - успешно?
Вернемся к нашим баранам - проблеме попадания в глиссаду авианосца на самолете со скоростью 200 км/ч и порывами ветра до 80 км/ч. Объясни, как это сделать?
Полл> Тебя уже в другой теме просили предоставить ссылки на материалы, подтверждающие возможность использования РЛС с синтезированной апертурой для разведки подвижных целей.
Полл> Теперь прошу и в этой теме предоставить такие ссылки.
Вернёмся к исходному вопросу.
Ссылки я уже давал, но освежим ваш склероз ещё раз, надеюсь этого будет достаточно:
Полл> Теперь прошу и в этой теме предоставить такие ссылки.
Вернёмся к исходному вопросу.
Ссылки я уже давал, но освежим ваш склероз ещё раз, надеюсь этого будет достаточно:
СДЦ - селекция движущихся целей. Результат-
Bredonosec> Можно мне обьяснить?
Bredonosec> спасибо.
Пожалуйста
Bredonosec> Итак. Идея радара..
Мне давно известна НО! Чел утверждает что:
Радарный Аркон-
Полл> Это разве не система с синтезированной апертурой, то есть непригодная для работы по подвижной цели?
Кроме того чуть выше:
Полл
Вчера 19:09:03
S.I.> Ну оцени примерно её разрешающую способность.
Полл> Для обнаружения объекта требуется разрешающая способность в половину его характеризующего размера.
Полл> Характерный размер авианосцев - это их длина, для "Китти Хок" это свыше 300 метров. То есть для УС-А достаточно разрешающей способности в 100 метров.(с)
Но, слава Богу из твоего объяснения он кажется уже понял, что:
Bredonosec> Вопрос исчерпан?
Полл> Ты только что убил шанс, что Сергей найдет хотя бы вики-описание "основного уравнения радиолокации".
И обнаружит, что разрешающей способности в нем нет.
Bredonosec> спасибо.
Пожалуйста
Bredonosec> Итак. Идея радара..
Мне давно известна
НО! Чел утверждает что:Радарный Аркон-
Полл> Это разве не система с синтезированной апертурой, то есть непригодная для работы по подвижной цели?
Кроме того чуть выше:
Полл
Вчера 19:09:03
S.I.> Ну оцени примерно её разрешающую способность.
Полл> Для обнаружения объекта требуется разрешающая способность в половину его характеризующего размера.
Полл> Характерный размер авианосцев - это их длина, для "Китти Хок" это свыше 300 метров. То есть для УС-А достаточно разрешающей способности в 100 метров.(с)
Но, слава Богу из твоего объяснения он кажется уже понял, что:
Bredonosec> Вопрос исчерпан?
Полл> Ты только что убил шанс, что Сергей найдет хотя бы вики-описание "основного уравнения радиолокации".
И обнаружит, что разрешающей способности в нем нет.
Это сообщение редактировалось 06.05.2012 в 10:29
S.I.> Мне давно известна НО! Чел утверждает что:

// www.scribd.com
Или режим синтезированной апертуры, или режим селекции движущихся целей, в режиме синтезированной апертуры обнаружение движущихся целей невозможно:
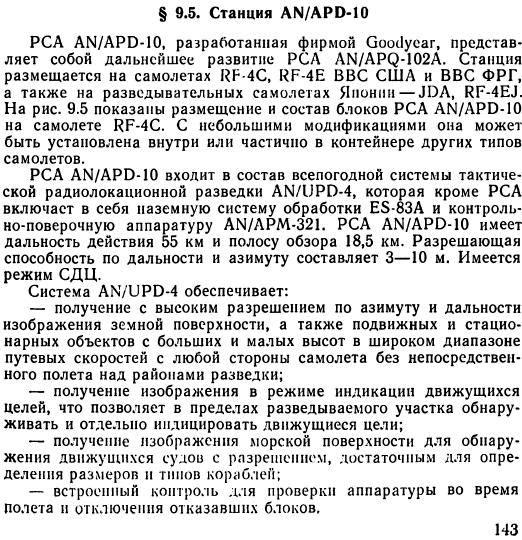
НО! Чел утверждает что:§ 9.5. Станция AN/APD-10 for Кондратенков Г.С. - Радиолокационные станции воздушной разведки - М., Воениздат - 1983
Scribd is the world's largest social reading and publishing site.// www.scribd.com
Или режим синтезированной апертуры, или режим селекции движущихся целей, в режиме синтезированной апертуры обнаружение движущихся целей невозможно:
Прикреплённые файлы:
Полл> Или режим синтезированной апертуры, или режим селекции движущихся целей, в режиме синтезированной апертуры обнаружение движущихся целей невозможно:
Не "или", а "и". Без режима синтезированной апертуры разрешение падает настолько, что уже ничего не обнаружишь ни движущегося ни неподвижного.
Не "или", а "и". Без режима синтезированной апертуры разрешение падает настолько, что уже ничего не обнаружишь ни движущегося ни неподвижного.
Современное состояние по открытым данным:
Использование данных спутниковых РЛС для решения задач контроля позиционирования промысловых судов.
Данные, получаемые с помощью радиолокаторов, установленных на европейских спутниках Envisat и ERS-2 являются наиболее доступными и эффективными. Космический аппарат ERS-2 находится на орбите с 1995 года и, несмотря на успешную работу, практически полностью исчерпал свой ресурс, в связи с чем, может быть в ближайшее время отключен. Поэтому первоочередной интерес представляют данные, получаемые со спутника Envisat.
Выбор спутникового сенсора для дистанционного обнаружения судов
В настоящее время в оперативном режиме функционируют радиолокаторы с синтезированной апертурой (РСА), установленные на спутниках ERS-2 и Envisat Европейского космического агентства и на спутнике RADARSAT Канадского космического агентства. Сравнительные характеристики РСА приведены в таблице 1.
Таблица 1. Краткие сведения о спутниковых радиолокаторах с синтезированной апертурой
Заданный район можно наблюдать каждые три дня, в некоторых случаях дважды в сутки на восходящем и нисходящим витках. ASAR Envisat имеет значительные конструктивные улучшения по сравнению с SAR ERS-2. Основными новшествами, значительно расширившими возможности радиолокационных наблюдений, являются
•В отличие от ERS SAR, который имел фиксированный угол излучения зондирующего сигнала (23° в середине полосы обзора), ASAR Envisat имеет конструктивную возможность электронного управления углом испускания зондирующего сигнала, позволяющую получать изображения в диапазоне углов от 15° до 45° от надира.
•Возможность одновременной передачи и приема зондирующего сигнала на разных поляризациях. Двухполяризационный радиолокатор может посылать вертикально- или горизонтально поляризованный сигнал, и получать сигнал либо на любой из этих поляризаций, либо на двух поляризациях одновременно. Это создает возможность использовать получать радиолокационные изображения для четырех комбинаций - ВВ, ГГ, ВГ, ГВ (первая буква соответствует поляризации испускаемого сигнала, а вторая - принятого).
•Возможность получать изображение высокого и среднего разрешения с различной полосой обзора.
Подробную информацию о радиолокаторе ASAR Envisat можно найти на WEB-странице http: envisat.esa.int/.
В настоящее время на коммерческой основе можно получать также радиолокационные изображения с канадского спутника RADARSAT. Несмотря на близкие геометрические характеристики конечного продукта (разрешение, полоса обзора), а также на то, что все выше описанные РСА работают в одном диапазоне при умеренных углах зондирования, изображения морской поверхности, полученные при близких метеорологических условиях для спутников Envisat и RADARSAT, могут значительно отличаться. Отличия заложены в алгоритмах синтеза апертуры, который является сложной и многопараметрической задачей. Учитывая высокую стоимость данных RADARSAT, а также широкие возможности Envisat для проведения совместного эксперимента по обнаружению судов, было решено использовать данные ASAR Envisat двух типов: среднего разрешения в вертикальной поляризации, (разрешение в точке 75м, размер кадра примерно 400х400 км) и двухполяризационные изображения высокого разрешения (разрешение в точке 12,5 м, размер кадра варьируется от угла зондирования от 56 до 105 км)
Для выяснения вопроса о возможности обнаружения судов небольшого размера (менее 35 метров) были проанализированы три радиолокационных изображения высокого разрешения, полученные в районе Таманского полуострова 07.08.2004 в 19:13 GMT, 13.04.2006 в 19:16 GMT и 19.04.2006 в 19:27 GMT. В область снимков попали восемь судов длиной от 35 до 24 метров. Все они были идентифицированы при сопоставлении радарных снимков и позиционных данных ОСМ. Это позволяет предположить, что практически все суда, за которыми осуществляется контроль в системе ОСМ (более 24 м) могут быть обнаружены на данных спутниковых РЛС высокого разрешения.
При этом следует учитывать, что наибольшее количество нарушений совершается судами длиной менее пятидесяти метров. Для выявления таких нарушений предпочтительным является использование данных РЛС высокого разрешения.
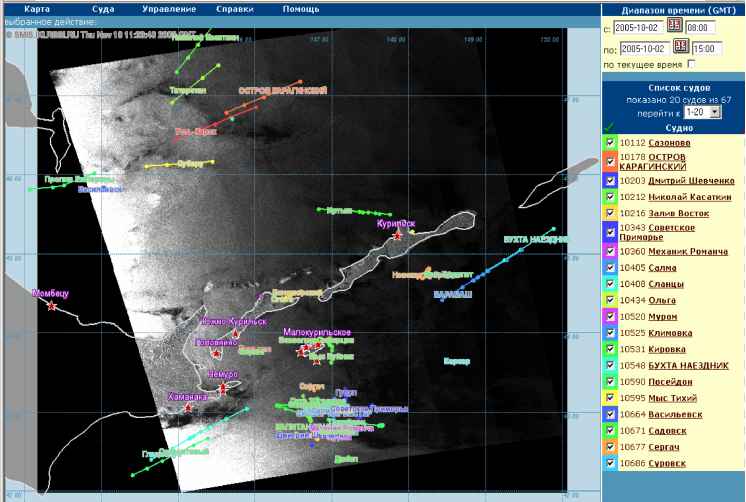
Рис. 1. Радиолокационный снимок среднего разрешения (75 м 400х430 км) совмещенный с треками судов находящихся во время пролета спутника в области снимка. Представлены суда длиной более 50 м.
Использование данных спутниковых РЛС для решения задач контроля позиционирования промысловых судов.
Данные, получаемые с помощью радиолокаторов, установленных на европейских спутниках Envisat и ERS-2 являются наиболее доступными и эффективными. Космический аппарат ERS-2 находится на орбите с 1995 года и, несмотря на успешную работу, практически полностью исчерпал свой ресурс, в связи с чем, может быть в ближайшее время отключен. Поэтому первоочередной интерес представляют данные, получаемые со спутника Envisat.
Выбор спутникового сенсора для дистанционного обнаружения судов
В настоящее время в оперативном режиме функционируют радиолокаторы с синтезированной апертурой (РСА), установленные на спутниках ERS-2 и Envisat Европейского космического агентства и на спутнике RADARSAT Канадского космического агентства. Сравнительные характеристики РСА приведены в таблице 1.
Таблица 1. Краткие сведения о спутниковых радиолокаторах с синтезированной апертурой
Заданный район можно наблюдать каждые три дня, в некоторых случаях дважды в сутки на восходящем и нисходящим витках. ASAR Envisat имеет значительные конструктивные улучшения по сравнению с SAR ERS-2. Основными новшествами, значительно расширившими возможности радиолокационных наблюдений, являются
•В отличие от ERS SAR, который имел фиксированный угол излучения зондирующего сигнала (23° в середине полосы обзора), ASAR Envisat имеет конструктивную возможность электронного управления углом испускания зондирующего сигнала, позволяющую получать изображения в диапазоне углов от 15° до 45° от надира.
•Возможность одновременной передачи и приема зондирующего сигнала на разных поляризациях. Двухполяризационный радиолокатор может посылать вертикально- или горизонтально поляризованный сигнал, и получать сигнал либо на любой из этих поляризаций, либо на двух поляризациях одновременно. Это создает возможность использовать получать радиолокационные изображения для четырех комбинаций - ВВ, ГГ, ВГ, ГВ (первая буква соответствует поляризации испускаемого сигнала, а вторая - принятого).
•Возможность получать изображение высокого и среднего разрешения с различной полосой обзора.
Подробную информацию о радиолокаторе ASAR Envisat можно найти на WEB-странице http: envisat.esa.int/.
В настоящее время на коммерческой основе можно получать также радиолокационные изображения с канадского спутника RADARSAT. Несмотря на близкие геометрические характеристики конечного продукта (разрешение, полоса обзора), а также на то, что все выше описанные РСА работают в одном диапазоне при умеренных углах зондирования, изображения морской поверхности, полученные при близких метеорологических условиях для спутников Envisat и RADARSAT, могут значительно отличаться. Отличия заложены в алгоритмах синтеза апертуры, который является сложной и многопараметрической задачей. Учитывая высокую стоимость данных RADARSAT, а также широкие возможности Envisat для проведения совместного эксперимента по обнаружению судов, было решено использовать данные ASAR Envisat двух типов: среднего разрешения в вертикальной поляризации, (разрешение в точке 75м, размер кадра примерно 400х400 км) и двухполяризационные изображения высокого разрешения (разрешение в точке 12,5 м, размер кадра варьируется от угла зондирования от 56 до 105 км)
Для выяснения вопроса о возможности обнаружения судов небольшого размера (менее 35 метров) были проанализированы три радиолокационных изображения высокого разрешения, полученные в районе Таманского полуострова 07.08.2004 в 19:13 GMT, 13.04.2006 в 19:16 GMT и 19.04.2006 в 19:27 GMT. В область снимков попали восемь судов длиной от 35 до 24 метров. Все они были идентифицированы при сопоставлении радарных снимков и позиционных данных ОСМ. Это позволяет предположить, что практически все суда, за которыми осуществляется контроль в системе ОСМ (более 24 м) могут быть обнаружены на данных спутниковых РЛС высокого разрешения.
При этом следует учитывать, что наибольшее количество нарушений совершается судами длиной менее пятидесяти метров. Для выявления таких нарушений предпочтительным является использование данных РЛС высокого разрешения.
Рис. 1. Радиолокационный снимок среднего разрешения (75 м 400х430 км) совмещенный с треками судов находящихся во время пролета спутника в области снимка. Представлены суда длиной более 50 м.
Прикреплённые файлы:
S.I.> Почему только крылатую? Тут вырисовывается глобальная система наведения МБР на подвижные цели.
S.I.> ББ со спутниковым наведением на конечном участке уже испытывались.
Проблема в том что атомный авианосец может на 30 узлах заложить циркуляцию диаметром в четыре своих длинны.
Так что вести авианосец нужно до последних метров, а как передавать сигнал на бб или применять ту или иную локацию при 3+км сек в плотных слоях атмосферы-непонятно.
Можно конечно сесть и посчитать но думаю с учётом ско лоцирования бб, ско сопровождения цели и прочими проблемами точности не хватит если канал связи отвалится хотябы за 50км до цели. А 50-это ещё очень оптимистично...
Конечно можно кидать тяжёлыми носителями серии по 5-7 бб...
Но тогда даже с учётом ТЭ начинки 100-150кг(что очень оптимистично) вопрос вывода цели из строя еденичным попаданием сомнителен.
Нужна Р36 и ББ весом в тонну числом 6-8 штук.
Опять возвращаяемся к тому что дерево Рт-2 г..но и нужны нормальные носители
S.I.> ББ со спутниковым наведением на конечном участке уже испытывались.
Проблема в том что атомный авианосец может на 30 узлах заложить циркуляцию диаметром в четыре своих длинны.
Так что вести авианосец нужно до последних метров, а как передавать сигнал на бб или применять ту или иную локацию при 3+км сек в плотных слоях атмосферы-непонятно.
Можно конечно сесть и посчитать но думаю с учётом ско лоцирования бб, ско сопровождения цели и прочими проблемами точности не хватит если канал связи отвалится хотябы за 50км до цели. А 50-это ещё очень оптимистично...
Конечно можно кидать тяжёлыми носителями серии по 5-7 бб...
Но тогда даже с учётом ТЭ начинки 100-150кг(что очень оптимистично) вопрос вывода цели из строя еденичным попаданием сомнителен.
Нужна Р36 и ББ весом в тонну числом 6-8 штук.
Опять возвращаяемся к тому что дерево Рт-2 г..но и нужны нормальные носители

iodaruk> Проблема в том что атомный авианосец может на 30 узлах заложить циркуляцию диаметром в четыре своих длинны.
Ну вообще-то 5-6 длин. А размеры у него 330м х 70м. А время подлёта с высоты 100км (где связь еще есть) до встречи для, к примеру, ББ МХ составляет 66 секунд, при этом скорость встречи с поверхностью около 500м/с. При этом последние 20 секунд скорость менее 1800м/с - т.е. связь уже есть.
iodaruk> Так что вести авианосец нужно до последних метров, а как передавать сигнал на бб или применять ту или иную локацию при 3+км сек в плотных слоях атмосферы-непонятно.
Ну нарисуй на сколько он убежит в сторону за минуту Всё совсем не так печально - для атакующей стороны.
Ну вообще-то 5-6 длин. А размеры у него 330м х 70м. А время подлёта с высоты 100км (где связь еще есть) до встречи для, к примеру, ББ МХ составляет 66 секунд, при этом скорость встречи с поверхностью около 500м/с. При этом последние 20 секунд скорость менее 1800м/с - т.е. связь уже есть.
iodaruk> Так что вести авианосец нужно до последних метров, а как передавать сигнал на бб или применять ту или иную локацию при 3+км сек в плотных слоях атмосферы-непонятно.
Ну нарисуй на сколько он убежит в сторону за минуту
Всё совсем не так печально - для атакующей стороны.
Прикреплённые файлы:
S.I.> ББ МХ составляет 66 секунд, при этом скорость встречи с поверхностью около 500м/с. При этом последние 20 секунд скорость менее 1800м/с - т.е. связь уже есть.
Цифры у вас какието не верные. Совсем.
Першинг второй быстрее падает.
А, понял, вы считали настильную траекторию. Так его при таком раскладе СМ3 достанет в полсотне км. Навесом пулять надо-а там всё печально-4+км/сек в момент попадания.
ЗЫ ну и гравитацию учитывать надо
S.I.> Ну нарисуй на сколько он убежит в сторону за минуту Всё совсем не так печально - для атакующей стороны.
60с*15м/сек==900м. С учётом манёвра-гарантированно выходит из под удара.
Плюс остаётся вопрос с пуском мбр по авианосцу и реакцией спрн... Типа мы пустили ракеты, утопили пять авианосцев но это не начало войны, а так...
Цифры у вас какието не верные. Совсем.
Першинг второй быстрее падает.
А, понял, вы считали настильную траекторию. Так его при таком раскладе СМ3 достанет в полсотне км. Навесом пулять надо-а там всё печально-4+км/сек в момент попадания.
ЗЫ ну и гравитацию учитывать надо
S.I.> Ну нарисуй на сколько он убежит в сторону за минуту Всё совсем не так печально - для атакующей стороны.
60с*15м/сек==900м. С учётом манёвра-гарантированно выходит из под удара.
Плюс остаётся вопрос с пуском мбр по авианосцу и реакцией спрн... Типа мы пустили ракеты, утопили пять авианосцев но это не начало войны, а так...
Это сообщение редактировалось 06.05.2012 в 15:49
iodaruk> А, понял, вы считали настильную траекторию. Так его при таком раскладе СМ3 достанет в полсотне км. Навесом пулять надо-а там всё печально-4+км/сек в момент попадания.
Считал оптимальную траекторию на 10000км. По коим и летают на такую дальность.
При меньших дальностях и меньших начальных скоростях угол входа больше - поэтому подлётное время от границ атмосферы мало меняется.
iodaruk> ЗЫ ну и гравитацию учитывать надо
Учтена, как и сопротивление воздуха и геометрия ББ МХ.
S.I.>> Ну нарисуй
iodaruk> 60с*15м/сек==900м. С учётом манёвра-гарантированно выходит из под удара.
Фиг он выходит. С учётом манёвра. Целятся с упреждением.
Максимальное отклонение по корпусу - 180м. По центру прицеливания - 300м. Итого 1кт гарантировано топит при воздушном взрыве без передач команд наведения в атмосфере.
Для прямого попадания обычной БЧ с коррекцией траектории на последних 20 секундах требуется поперечное ускорение аж 0,2g.
Считал оптимальную траекторию на 10000км. По коим и летают на такую дальность.
При меньших дальностях и меньших начальных скоростях угол входа больше - поэтому подлётное время от границ атмосферы мало меняется.
iodaruk> ЗЫ ну и гравитацию учитывать надо
Учтена, как и сопротивление воздуха и геометрия ББ МХ.
S.I.>> Ну нарисуй
iodaruk> 60с*15м/сек==900м. С учётом манёвра-гарантированно выходит из под удара.
Фиг он выходит. С учётом манёвра. Целятся с упреждением.
Максимальное отклонение по корпусу - 180м. По центру прицеливания - 300м. Итого 1кт гарантировано топит при воздушном взрыве без передач команд наведения в атмосфере.
Для прямого попадания обычной БЧ с коррекцией траектории на последних 20 секундах требуется поперечное ускорение аж 0,2g.
Прикреплённые файлы:
Это сообщение редактировалось 06.05.2012 в 18:54
S.I.> Не "или", а "и". Без режима синтезированной апертуры разрешение падает настолько, что уже ничего не обнаружишь ни движущегося ни неподвижного.
Сережа, ты уже нашел разрешение в основном уравнении радиолокации?
Режим для поиска движущихся объектов называется, сюрприз, режимом СЕЛЕКЦИИ, а не режимом обнаружения.
И да - разрешение в этом режиме сильно падает, что наглядно видно по запощенным фоткам.
Сережа, ты уже нашел разрешение в основном уравнении радиолокации?
Режим для поиска движущихся объектов называется, сюрприз, режимом СЕЛЕКЦИИ, а не режимом обнаружения.
И да - разрешение в этом режиме сильно падает, что наглядно видно по запощенным фоткам.
S.I.> Фиг он выходит. С учётом манёвра. Целятся с упреждением.
У вас время какое? Последние 20 секунд взято? Даже если предположить что последние 20 секунд связь есть-окно в 40+ секунд - и только потом по фактическому отклонению о точки упреждения в 600-х метрах можно корректироваться.
С ябч нет смысла ограничивать себя килотонной. Хоть какойто смысл это имеет при конвенциональном поражении...
Хотя если верить новой волне слухов про ирак-2003...
У вас время какое? Последние 20 секунд взято? Даже если предположить что последние 20 секунд связь есть-окно в 40+ секунд - и только потом по фактическому отклонению о точки упреждения в 600-х метрах можно корректироваться.
С ябч нет смысла ограничивать себя килотонной. Хоть какойто смысл это имеет при конвенциональном поражении...
Хотя если верить новой волне слухов про ирак-2003...
Полл> Режим для поиска движущихся объектов называется, сюрприз, режимом СЕЛЕКЦИИ, а не режимом обнаружения.
Полл> И да - разрешение в этом режиме сильно падает, что наглядно видно по запощенным фоткам.
Да кой хрен разница? Главное что современные гражданские спутники ДЗЗ с РСА легко обнаруживают движущиеся корабли длиной от 50м. Остальное меня в данном случае мало интересует.
Полл> И да - разрешение в этом режиме сильно падает, что наглядно видно по запощенным фоткам.
Да кой хрен разница? Главное что современные гражданские спутники ДЗЗ с РСА легко обнаруживают движущиеся корабли длиной от 50м. Остальное меня в данном случае мало интересует.
Это сообщение редактировалось 06.05.2012 в 18:26
iodaruk> У вас время какое? Последние 20 секунд взято?
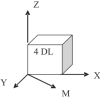
А цифр не видно? Радиус циркуляции 5 длин. Скорость 15м/с. Длина 333м. Время - 70 сек.
Расстояние между ближайшими точками корпуса получается максимум- 1 кабельтов. К стати эта же картинка хорошо иллюстрирует почему АВ при удачном (не для него ) ракурсе стрельбы не может уйти от "Шквала" ни при каком манёвре.
А цифр не видно? Радиус циркуляции 5 длин. Скорость 15м/с. Длина 333м. Время - 70 сек.
Расстояние между ближайшими точками корпуса получается максимум- 1 кабельтов. К стати эта же картинка хорошо иллюстрирует почему АВ при удачном (не для него
) ракурсе стрельбы не может уйти от "Шквала" ни при каком манёвре.
iodaruk> Навесом пулять надо-а там всё печально-4+км/сек в момент попадания.
Навесом?
Можно. Только дальность при одинаковой начальной скорости и угле с горизонтом 45 градусов сокращается с 10тыс.км до примерно 8. А время полёта увеличивается с 33 минут до 45, но зато время полёта от границы атмосферы - всего 21 сек. Скорость встречи с поверхностью 2км/с.
Ну а за 20 сек АВ даже свою длину корпуса не пройдёт при максимальной скорости. Куда уж там уклонится..
Навесом?
Можно. Только дальность при одинаковой начальной скорости и угле с горизонтом 45 градусов сокращается с 10тыс.км до примерно 8. А время полёта увеличивается с 33 минут до 45, но зато время полёта от границы атмосферы - всего 21 сек. Скорость встречи с поверхностью 2км/с.
Ну а за 20 сек АВ даже свою длину корпуса не пройдёт при максимальной скорости. Куда уж там уклонится..
Прикреплённые файлы:
S.I.> Остальное меня в данном случае мало интересует.
"Остальное" в данном случае - объяснение, что обнаруживают в данном случае и как.
"Остальное" в данном случае - объяснение, что обнаруживают в данном случае и как.
Полл> "Остальное" в данном случае - объяснение, что обнаруживают в данном случае и как.
Ну можно конечно упираться до посинения - но факт остаётся фактом:
Проведенный совместный эксперимент по обнаружению промысловых судов на основе данных спутниковой радиолокации и ОСМ показал, что суда, размеры которых превышают 50 метров можно оперативно контролировать с высокой надежностью с помощью данных ASAR Envisat. Суда меньших размеров также хорошо детектируются на радиолокационных изображениях, но не в оперативном режиме.
// www.scanex.ru
Первый спутник программы – ENVISAT-1 – был запущен 1-го марта 2002 г. В соответствии с глобальной миссией изучения Земли на его борту установлено 10 различных приборов, работающих в широком диапазоне волн электромагнитного спектра: от микроволновых до ультрафиолетовых. В том числе ENVISAT-1 оснащен радиолокатором бокового обзора с синтезированной апертурой ASAR, позволяющим получать данные с пространственным разрешением от 30 до 1000 м в полосе обзора от 5 до 400 км вне зависимости от облачности и условий освещенности.
Ну можно конечно упираться до посинения - но факт остаётся фактом:
Проведенный совместный эксперимент по обнаружению промысловых судов на основе данных спутниковой радиолокации и ОСМ показал, что суда, размеры которых превышают 50 метров можно оперативно контролировать с высокой надежностью с помощью данных ASAR Envisat. Суда меньших размеров также хорошо детектируются на радиолокационных изображениях, но не в оперативном режиме.
Спутники ENVISAT - данные, снимки
Программа ENVISAT – прием снимков, архив данных, станции приема и программное обеспечение для обработки, ИТЦ СканЭкс// www.scanex.ru
Первый спутник программы – ENVISAT-1 – был запущен 1-го марта 2002 г. В соответствии с глобальной миссией изучения Земли на его борту установлено 10 различных приборов, работающих в широком диапазоне волн электромагнитного спектра: от микроволновых до ультрафиолетовых. В том числе ENVISAT-1 оснащен радиолокатором бокового обзора с синтезированной апертурой ASAR, позволяющим получать данные с пространственным разрешением от 30 до 1000 м в полосе обзора от 5 до 400 км вне зависимости от облачности и условий освещенности.
Это сообщение редактировалось 06.05.2012 в 18:57
Реклама Google — средство выживания форумов :)
S.I.> Ну можно конечно упираться до посинения - но факт остаётся фактом:
•Заключительным шагом в сравнении позиционных данных ОСМ и данных, полученных с помощью спутниковой радиолокации, являлась визуальная идентификация или ее отсутствие на увеличенном до полного разрешения снимке. Судно считалось обнаруженным и соответствующим данным ОСМ, если в районе трека судна на радиолокационном изображение наблюдается хорошо различимая яркая белая точка или группа точек. Примеры достоверного обнаружения судов приведены на рис. 2.
Двоешники. И ты с ними за компанию.
•Заключительным шагом в сравнении позиционных данных ОСМ и данных, полученных с помощью спутниковой радиолокации, являлась визуальная идентификация или ее отсутствие на увеличенном до полного разрешения снимке. Судно считалось обнаруженным и соответствующим данным ОСМ, если в районе трека судна на радиолокационном изображение наблюдается хорошо различимая яркая белая точка или группа точек. Примеры достоверного обнаружения судов приведены на рис. 2.
Двоешники. И ты с ними за компанию.
Copyright © Balancer 1997..2018
Создано 04.05.2012
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 04.05.2012
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
